Motor Khusus Lainnya
Motor Induksi Tiang Berbayang
Cara mudah untuk memberikan torsi awal ke motor fase tunggal adalah dengan menanamkan belokan korsleting di setiap kutub pada 30° hingga 60° ke belitan utama. (Gambar di bawah) Biasanya 1/3 tiang tertutup oleh tali tembaga telanjang.
Kumparan peneduh ini menghasilkan fluks teredam tertinggal waktu yang berjarak 30° sampai 60° dari medan utama. Fluks tertinggal dengan komponen utama yang tidak teredam ini menghasilkan medan putar dengan torsi kecil untuk menghidupkan rotor.
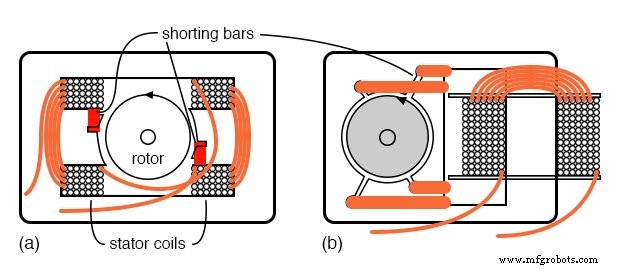
Motor induksi kutub berbayang, (a) desain kumparan ganda, (b) versi kumparan tunggal yang lebih kecil
Torsi awal sangat rendah sehingga motor kutub berbayang hanya diproduksi dalam ukuran yang lebih kecil, di bawah 50 watt. Biaya rendah dan kesederhanaan sesuai dengan motor ini untuk kipas kecil, sirkulasi udara, dan aplikasi torsi rendah lainnya. Kecepatan motor dapat diturunkan dengan mengganti reaktansi secara seri untuk membatasi arus dan torsi, atau dengan mengganti tap koil motor.
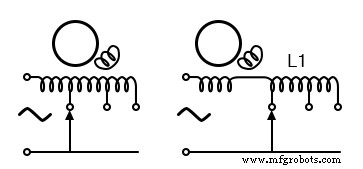
Kontrol kecepatan motor kutub berbayang
Motor Servo 2-fase
Sebuah motor servo biasanya bagian dari loop umpan balik yang mengandung komponen elektronik, mekanik, dan listrik. Loop servo adalah alat untuk mengontrol gerakan suatu objek melalui motor. Persyaratan dari banyak sistem seperti itu adalah respons yang cepat.
Untuk mengurangi percepatan robbing secara inersia, inti besi dikeluarkan dari rotor hanya menyisakan cangkir aluminium yang dipasang di poros untuk berputar. Inti besi dimasukkan kembali ke dalam cangkir sebagai komponen statis (tidak berputar) untuk melengkapi sirkuit magnetik.
Kalau tidak, konstruksinya khas motor dua fase. Rotor bermassa rendah dapat berakselerasi lebih cepat daripada rotor sangkar tupai.

Motor servo AC 2-φ Akselerasi tinggi
Satu fase terhubung ke saluran fase tunggal; yang lain digerakkan oleh amplifier. Salah satu belitan digerakkan oleh 90° bentuk gelombang pergeseran fasa. Pada gambar di atas, ini dicapai dengan kapasitor seri pada belitan saluran listrik.
Belitan lainnya digerakkan oleh gelombang sinus amplitudo variabel untuk mengontrol kecepatan motor. Fase bentuk gelombang mungkin terbalik (180° pergeseran fasa) untuk membalikkan arah motor. Gelombang sinus variabel ini adalah output dari penguat kesalahan.
Lihat bagian CT sinkronisasi Misalnya. Permukaan kontrol pesawat dapat diposisikan oleh motor servo 400 Hz 2-φ.
Motor Histeresis
Jika rotor berlaminasi baja Si histeresis rendah dari motor induksi diganti dengan silinder tak berliku tanpa slot dari baja magnet yang diperkeras, histeresis, atau tertinggal di belakang magnetisasi rotor, sangat ditekankan.
Motor sinkron torsi rendah yang dihasilkan mengembangkan torsi konstan dari kecepatan mati ke kecepatan sinkron. Karena torsi rendah, motor histeresis hanya tersedia dalam ukuran yang sangat kecil dan hanya digunakan untuk aplikasi kecepatan konstan seperti penggerak jam, dan sebelumnya, meja putar fonograf.
Kopling Arus Eddy
Jika stator motor induksi atau motor sinkron dipasang untuk berputar secara independen dari rotor, hasil kopling arus eddy. Kumparan dieksitasi dengan DC dan dilekatkan pada beban mekanis.
Rotor sangkar tupai terpasang ke motor penggerak. Motor penggerak dimulai tanpa eksitasi DC ke kopling. Eksitasi DC disesuaikan dari nol ke nilai akhir yang diinginkan sehingga menghasilkan torsi variabel yang terus menerus dan lancar.
Pengoperasian kopling arus pusar mirip dengan speedometer otomotif arus pusar analog.
Ringkasan:Motor khusus lainnya
- Motor induksi kutub berbayang , digunakan dalam aplikasi torsi rendah di bawah 50 watt, mengembangkan fase kedua dari belokan korsleting di stator.
- Motor histeresis adalah motor sinkron torsi rendah kecil yang pernah digunakan pada jam dan fonograf.
- Clutch arus pusaran memberikan torsi yang dapat disesuaikan.


