HC sr04:Bagaimana Cara Kerja Ultrasonic Ranging Sensor dan Antarmuka dengan Arduino?
Ultrasound adalah gelombang suara bernada tinggi dengan frekuensi yang melebihi jangkauan pendengaran manusia normal (lebih besar dari 20kHz). Salah satu jenis sensor ultrasound adalah HC-SR04 yang mendeteksi objek sejauh 13 kaki darinya. Pada artikel ini, kami akan menunjukkan cara kerja sensor dan melakukan proyek antarmuka dengan Arduino.
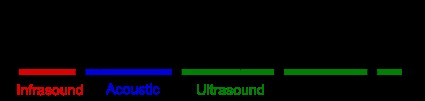
Rentang frekuensi dibandingkan dengan ultrasound
Ikhtisar sensor jarak ultrasonik HC SR04
Sensor ultrasonik (AS) hc-sr04 terdiri dari dua transduser ultrasonik; pemancar dan penerima.

Pemancar (T) dan Penerima (R)
Penerima menunggu dan menerima pulsa yang ditransmisikan, sedangkan pemancar mengubah sinyal listrik menjadi pulsa suara ultrasonik 40KHz.
Spesifikasi terdiri dari:
Dimensi – 45 x 20 x 15mm
Sinyal input pemicu – pulsa TTL 10 mikrodetik
Mengukur sudut – 15°
Akurasi jangkauan – 3mm
Kisaran minimum – 2cm
Rentang maksimum – 4cm
Frekuensi operasi – 40KHz
Tegangan pengoperasian – Daya DC 5V
Pin Sensor Jarak Ultrasonik Hc-sr04

Pinout sensor Ultrasonik HC-SR04
Kami telah merangkum konfigurasi pin sensor ultrasonik hc-sr04 pada tabel berikut.
| No Pin | Nama pin | Deskripsi pin |
| 1 | Vcc | Ini adalah pin catu daya sensor (tegangan catu 5V). |
| 2 | Pemicu/ Pemicu | Ini berfungsi sebagai pin input. Selalu tetap tinggi selama 10 detik untuk mulai mengukur dengan mengirimkan gelombang ultrasound. |
| 3 | Gema | Bertindak sebagai pin keluaran. Pin gema tetap tinggi untuk beberapa periode, setara dengan waktu yang dibutuhkan pulsa ultrasound untuk kembali ke hc-sr04. |
| 4 | GND | Terhubung ke ground sistem. |
Apa Prinsip Kerja Sensor Ranging Ultrasonik HC-SR04?
Hc-sr04 bekerja dengan menghasilkan ultrasound sekitar 40K Hz yang bergerak melalui udara. Jika pulsa suara ultrasonik menghadapi hambatan atau objek di jalur perjalanan mereka, itu memantul kembali ke sensor.
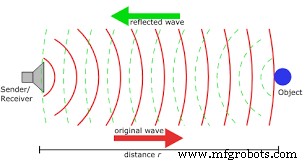
Cara kerja sensor ultrasonik
Menghasilkan ultrasound
Pertama, pastikan trigPin dalam keadaan Tinggi selama sepuluh mikrodetik, mengirimkan ledakan ultrasonik 8-siklus yang bergerak dengan kecepatan suara. Selanjutnya, echoPin akan menjadi tinggi setelah terkirim meledak. Setelah itu, echoPin akan menunggu atau mendengarkan gelombang ultrasound yang Anda pantulkan dari suatu objek.
echoPin akan masuk ke status Rendah setelah 38 ms jika tidak ada objek.
Namun, jika ada objek yang memantulkan pulsa ultrasonik, echoPin masuk ke status Rendah lebih awal dari 38 ms.
Dengan informasi durasi waktu selama keadaan tinggi pin Echo, kita dapat mengetahui jarak perjalanan gelombang suara. Kami juga akan menentukan jarak dari hc-sr04 ke objek.
Jarak =(Kecepatan X Waktu)/2
Dimana;
Waktu =Jumlah waktu echoPin tinggi (dengan asumsi 2 md)
Kecepatan =Kecepatan suara (340m/s atau 340cm/s)
Membagi hasil dengan dua membantu mengukur durasi gelombang suara yang dibutuhkan untuk mencapai objek sebelum memantul kembali.
Jadi;
Jarak =(Kecepatan × Waktu)/2 =(34cm/md × 1,5md) / 2 =25,5cm
Sekarang jarak dari sensor ke objek adalah 25,5 cm.
Dimensi Hc sr04
Dimensi sensor HC-SR04 ditunjukkan di bawah ini:

Dimensi HC-SR04
Namun, perhatikan bahwa dimensi akan selalu sedikit berbeda karena produsen yang berbeda.
Hc-sr04 Terhubung ke Arduino
Ada beberapa cara untuk menghubungkan sensor Anda, termasuk menggunakan I2C, Raspberry Pi, dan Arduino. Untuk proyek hari ini, kita akan membahas papan Arduino.
Bahan yang dibutuhkan
- Sensor jarak ultrasonik Grove
- Perisai dasar Grove
- Kabel papan tempat memotong roti dan Jumper
Pedoman
Menghubungkan Perangkat Keras
- Mulai dengan menghubungkan sensor ke pelindung berbasis Grove di port D7.
- Kedua, pasang pelindung Grove-base Anda ke papan Arduino.
- Kemudian, gunakan kabel USB untuk menghubungkan Arduino ke komputer.
Sambungan pin ada di tabel di bawah ini.
| Arduino UNO | Sensor ultrasonik HC-SR04 |
| GND | GND |
| -3 (atau pin I/O digital lainnya) | Gema |
| 2 (atau pin I/O digital lainnya) | Pin pemicu |
| 5V | Vcc |
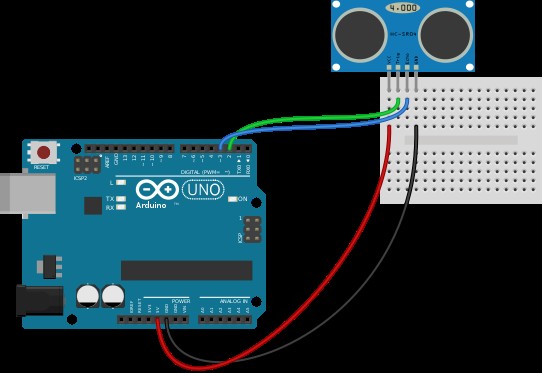
Sensor ultrasonik HC-SR04 dan diagram pengkabelan Arduino
Mengonfigurasi Perangkat Lunak
- Telusuri situs web GitHub dan unduh Perpustakaan sensor ultrasonik dari itu.
- Selanjutnya, salin dan tempel kode tersebut ke Arduino IDE, tempat Anda akan mengunggahnya sesudahnya.
Muncul kode seperti di bawah ini.
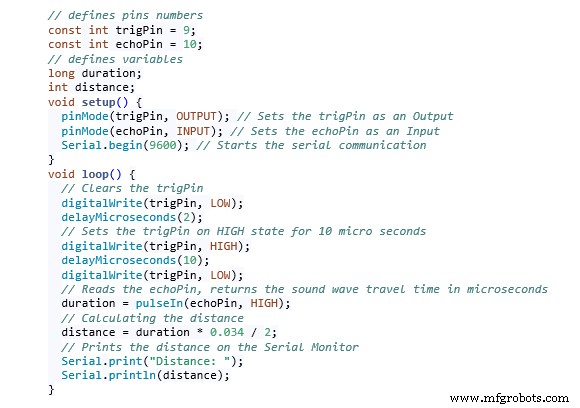
Elaborasi Kode
Dimulai dengan mendefinisikan pin Echo dan Trig, yaitu pin3 (echoPin) dan pin2 (trigPin). Selanjutnya, kita membutuhkan variabel integer untuk mewakili jarak dan variabel panjang ('durasi') untuk mengetahui waktu tempuh dari sensor.
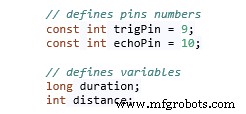
Selain itu, tentukan echoPin sebagai input, sedangkan trip-in akan menjadi output. Kemudian, mulailah komunikasi serial yang akan menampilkan hasilnya di layar monitor serial.

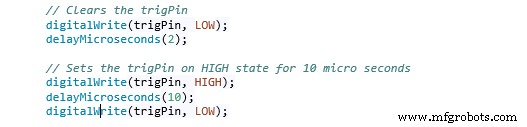
Pastikan Anda memiliki trigPin yang jelas sehingga Anda dapat mengaturnya pada Status RENDAH selama sekitar dua mikrodetik selama pengulangan. Kemudian, naikkan pengaturan pin ke keadaan tinggi sepuluh mikrodetik untuk menghasilkan gelombang ultrasound.
Selanjutnya, ada pulseIn() tombol fungsi dengan dua parameter, yaitu
- Keadaan denyut nadi yang akan Anda baca (Rendah atau Tinggi), atau
- Nama pin Gema.
Gunakan fungsi tersebut untuk membaca waktu tempuh, lalu tempatkan nilainya pada variabel 'durasi'.

Kami akan menyetel echoPin ke Tinggi karena sensor HC-SR04 secara otomatis menyetelnya tinggi setelah mentransfer ledakan ultrasonik 8-siklus dari pemancar. Akibatnya, pengaturan waktu dimulai, tetapi setelah menerima gelombang suara yang dipantulkan, pengaturan waktu berhenti karena pin gema menjadi Rendah.
Akhirnya, pulseIn() fungsi mengembalikan panjang pulsa dalam mikrodetik.
Kami akan menggunakan rumus yang dibahas sebelumnya untuk mendapatkan jarak dari sini. Oleh karena itu, kalikan durasinya dengan 0,034, lalu bagi nilainya dengan dua.
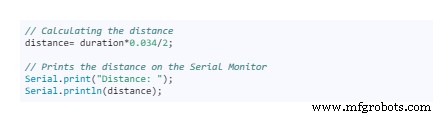
Terakhir, cetak nilai jarak akhir yang ditampilkan pada Serial Monitor.
Batasan aplikasi HC-SR04
Dibandingkan dengan sensor ultrasonik murah lainnya, kami menyetujui sensor HC-SR04 ideal untuk kegunaan dan akurasi tinggi. Namun, sensor dapat menimbulkan beberapa tantangan, seperti pada contoh di bawah ini.
- Pertama, mungkin sulit bagi sensor untuk mendeteksi objek permukaan yang lembut dan tidak beraturan seperti boneka binatang karena objek menyerap tetapi tidak memantulkan suara.
- Kedua, memasang sensor HC-SR04 rendah pada perangkat sering kali menghasilkan suara lantai yang dipantulkan, bukan dari perangkat. Juga, sebuah objek bisa terlalu kecil, sehingga tidak cukup memantulkan suara ke HC-SR04.
- Kemudian, jika permukaan reflektif benda padat berada pada sudut yang dangkal, suara tidak memantulkan HC-SR04.
- Terakhir, jika jarak antara penghalang/objek dan sensor lebih dari 13 kaki, tidak akan ada pantulan suara.
Kesimpulan
HC-SR04 adalah sensor populer yang mudah dihubungkan, terjangkau, dan berdaya rendah, sehingga ideal untuk perangkat yang dioperasikan dengan baterai. Ini memiliki berbagai aplikasi yang terdiri dari mengukur jarak dalam jarak 2cm hingga 400cm, memetakan objek di sekitarnya, dll.
Jika Anda ingin tahu lebih banyak tentang sensor ultrasonik, Anda dapat menghubungi kami. Kami akan sangat senang mendengar kabar dari Anda.


