Tentang proyek ini
Pengenalan Robot
Ultraviolet Germicidal Robot (Robot UV) adalah robot teleoperated yang dilengkapi dengan sistem sinar UV. Sistem ini berisi kendaraan robot yang bergerak dan ground station controller (GCS). Operator dapat mengontrol robot menggunakan joystick pengontrol stasiun bumi (GCS) sambil mengamati umpan kamera robot.
Robot dapat mendisinfeksi dan membunuh penyakit, virus, bakteri, dan jenis mikroorganisme organik berbahaya lainnya di lingkungan, dengan sinar ultraviolet, dengan memecah struktur DNA mereka. Saat ini, beberapa negara telah berhasil menguji robot ini untuk mendisinfeksi rumah sakit, transportasi umum, ruang kantor, dan tempat umum lainnya. Kami telah menerapkan robot UV ini dengan cara yang hemat biaya untuk memperluas proses desinfeksi ke tempat-tempat umum.
Mengapa bukan cairan disinfektan?

Metode yang paling umum dan populer untuk mendisinfeksi tempat umum adalah dengan menyemprotkan cairan disinfektan yang merupakan cairan berbasis alkohol 70%. Baru-baru ini, Organisasi Kesehatan Dunia (WHO) telah mengumumkan bahwa penggunaan cairan disinfektan secara teratur di tempat umum sangat berbahaya. Hal ini dapat menyebabkan masalah pada sistem pernapasan karena aromanya yang kuat, menyebabkan iritasi kulit, dan dapat menyebabkan ketidakseimbangan lingkungan.
Selanjutnya, metode ini dikaitkan dengan biaya material dan tenaga kerja yang besar setiap hari.
Kelebihan Robot UV
- Biaya satu kali (Tidak perlu isi ulang alkohol atau cairan klorin).
- Dapat digunakan untuk mendisinfeksi permukaan, pakaian medis, masker medis, dan peralatan medis lainnya.
- Kurangi waktu desinfeksi hingga 60% jika dibandingkan dengan metode desinfeksi berbasis cairan. (Waktu pengeringan sangat tinggi bila digunakan di lingkungan di mana bahan kain tersedia).
- Kemampuan untuk digunakan di lingkungan dengan peralatan elektronik.
- Satu operator dapat mencakup area yang luas. ( Tidak perlu banyak orang seperti dalam semprotan cair)
- Kami telah menguji dan membuktikan tingkat desinfeksi 99,997% untuk robot ini bekerja sama dengan laboratorium mikrobiologi di universitas setempat. (Dijelaskan di bagian terakhir)
Iradiasi Kuman Kuman Ultraviolet (UVGI) 
Ultraviolet germicidal iradiation (UVGI) adalah metode desinfeksi yang menggunakan sinar ultraviolet (ultraviolet C atau UVC) gelombang pendek untuk membunuh atau menonaktifkan mikroorganisme dengan menghancurkan asam nukleat dan mengganggu DNA mereka, sehingga mereka tidak dapat melakukan fungsi seluler yang vital. UVC diserap oleh basa RNA dan DNA dan dapat menyebabkan fusi fotokimia dari dua pirimidin yang berdekatan menjadi dimer yang terhubung secara kovalen, yang kemudian menjadi basa yang tidak berpasangan.
UVGI digunakan dalam berbagai aplikasi, seperti pemurnian makanan, udara, dan air. UVGI dapat digunakan untuk mencegah penyebaran penyakit menular tertentu. Lampu pelepasan merkuri (Hg) tekanan rendah dan LED biasanya digunakan dalam aplikasi UVGI dan memancarkan radiasi ultraviolet-C (100–280 nanometer) gelombang pendek, terutama pada 254 nm.
Setiap jenis mikroorganisme memerlukan dosis sinar UV yang berbeda untuk menonaktifkan fungsinya. Mempertimbangkan situasi Covid-19, penonaktifan virus yang sama menggunakan sinar UV dipertimbangkan di sini. Dalam sebagian besar makalah dan artikel penelitian, kelompok penelitian telah menyebutkan sinar UV yang diperlukan untuk proses sterilisasi dalam istilah "Joule per meter persegi" atau "Joule per sentimeter persegi". Namun ketika mempertimbangkan parameter dan spesifikasi sinar UV, pabrikan telah memberikan intensitas sinar UV dalam bentuk "Microwatt(uW) per sentimeter persegi" pada jarak 1 meter.
Satuan "Watt(W)" mewakili energi yang dipancarkan dalam periode satu detik. Microwatt per sentimeter persegi adalah energi yang melewati area satu sentimeter persegi dalam satu detik.
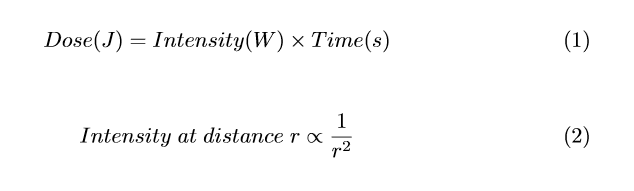
Persamaan 1 menunjukkan hubungan antara dosis dan intensitas. Disimpulkan bahwa dosis yang berbeda dapat dicapai dengan memvariasikan waktu pemaparan ke sumber sinar UV yang sama.
Hubungan antara intensitas UV dan jarak ditunjukkan oleh Persamaan 2. Berdasarkan hal tersebut dapat disimpulkan bahwa intensitas UV semakin rendah dengan semakin jauhnya jarak dari sumber cahaya.
Menurut Wikipedia, dosis 8mJ dapat menonaktifkan sebagian besar virus.
Memahami fungsionalitas robot
Sistem keseluruhan agak rumit karena kami telah menambahkan beberapa fungsi dan fitur keselamatan untuk memenuhi standar industri. Sebelum menjelaskan prosedur implementasi, ada baiknya untuk memahami cara kerja sistem.
Robot memiliki 3 komponen utama.
1. Kendaraan darat

Bagian ini digerakkan oleh dua roda yang digerakkan oleh motor bergigi DC (Robot penggerak diferensial). Ada dua roda kastor di bagian depan dan belakang untuk menjaga keseimbangan. Kami telah menempatkan sistem kontrol elektronik dan baterai, yang merupakan baterai Asam Timbal 12V 35Ah di dalam kendaraan darat.
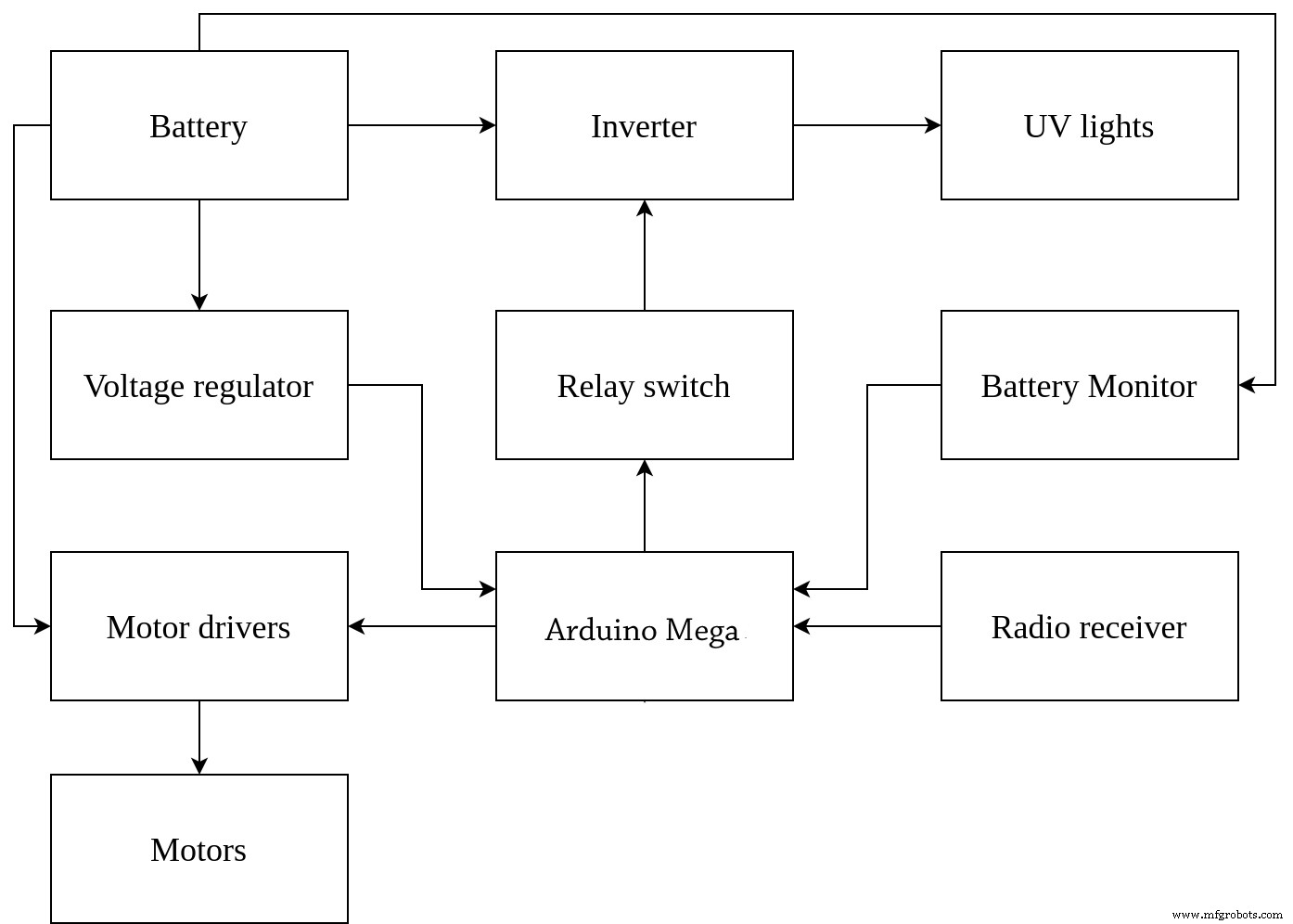
Arduino Mega ditenagai dengan baterai utama melalui modul pengatur tegangan untuk menurunkan tegangan dari 12V menjadi 5V. Penerima radio RC empat saluran dengan output PWM terhubung ke papan Mega. Motor digerakkan melalui driver motor jembatan H saluran ganda yang terhubung ke papan Arduino. Inverter terhubung antara lampu UV dan baterai dan dikendalikan menggunakan sakelar relai yang terhubung ke papan Arduino.
2. Menara lampu UV
Kami telah menggunakan lampu UV Fluorescent yang memerlukan unit pemberat elektronik terpisah untuk menyalakan bola lampu. Menara cahaya berisi 6 lampu UV yang ditempatkan di sekitar silinder aluminium yang terbuat dari lembaran aluminium dengan menggulungnya. Silinder aluminium ini berfungsi sebagai reflektor sinar UV.
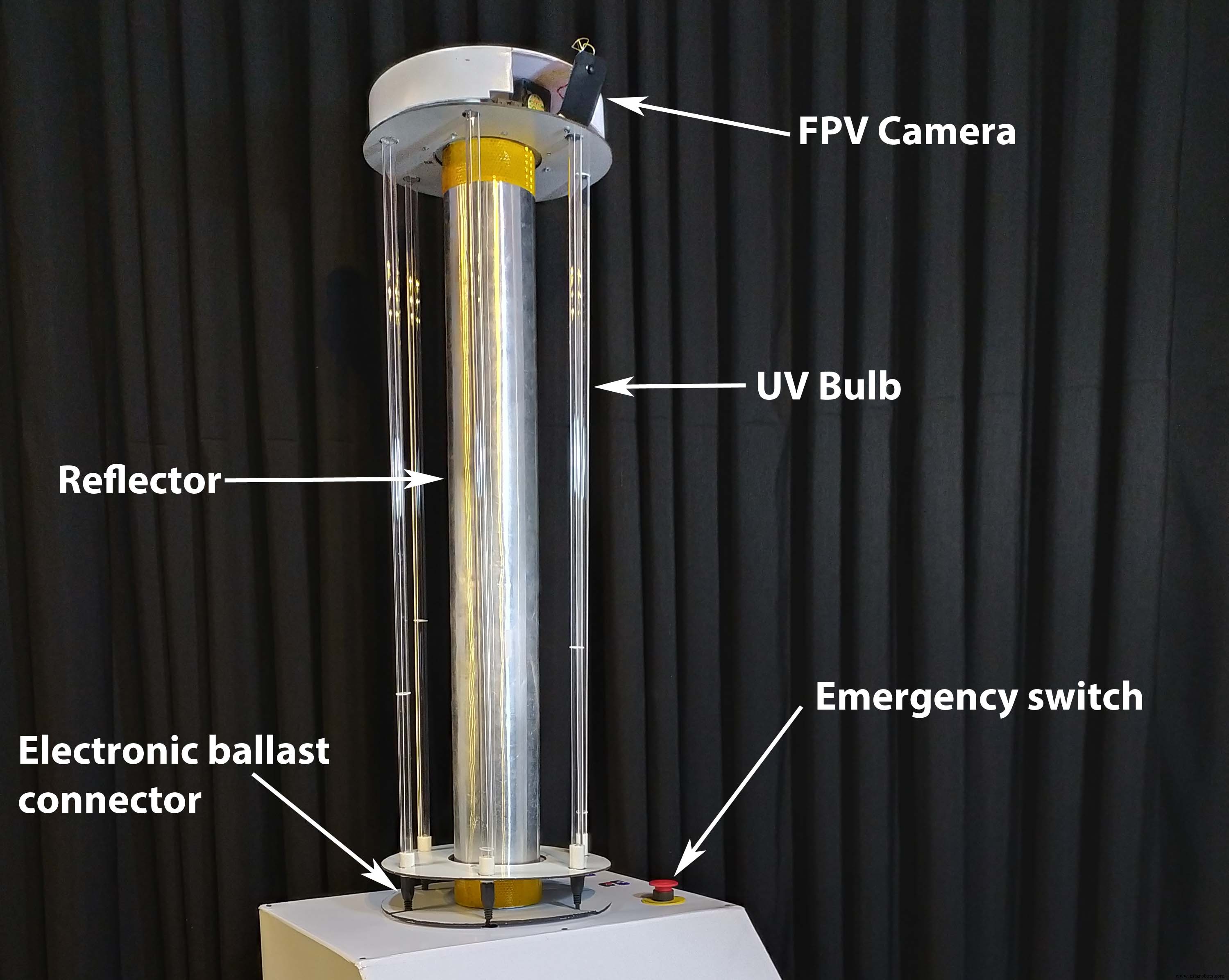
Semua ballast elektronik ditempatkan di dalam silinder aluminium. Di bagian atas menara, ada kamera FPV dan pemancar FPV untuk mengirimkan umpan video ke GCS. Menara UV dipasang di atas kendaraan darat.
3. Pengendali Stasiun Bumi

Ini adalah remote kontrol robot. Layar menunjukkan umpan balik kamera yang diterima dari robot. Joystick digunakan untuk menggerakkan robot. Lampu UV dapat dinyalakan dan dimatikan menggunakan sakelar UV. Sakelar lengan berfungsi sebagai sakelar pengaman. Ini mengurangi semua fungsi saat dihidupkan.
Menyalakan lampu UV

Untuk robot kami, kami telah memilih 6 lampu UV dengan spesifikasi sebagai berikut.
- Daya - 55w
- Panjang gelombang - 254nm
- panjang - 890mm
- diameter tabung - 15mm
- tipe - ujung tunggal 4 pin
Ini bukan spesifikasi yang ketat kecuali panjang gelombang. Unit ballast elektronik terhubung ke 4 pin bohlam UV. Bola lampu UV akan menyala saat daya disuplai ke ballast elektronik.
***Sinar UV berbahaya bagi kulit dan mata manusia. Jangan mengekspos mata dan kulit Anda untuk waktu yang lama. Mengamati cahaya melalui kaca adalah prosedur paling aman karena sinar UV tidak dapat menembus kaca transparan.***
Sistem Video FPV
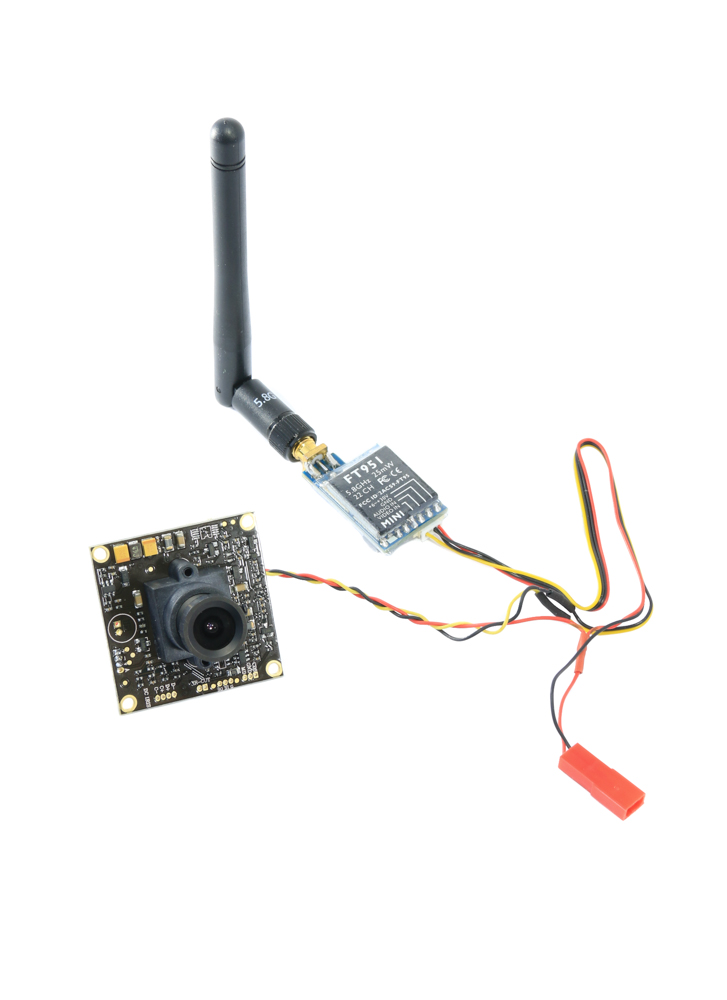

FPV sistem video terutama digunakan dalam drone untuk mendapatkan pandangan mata burung. Dalam kasus kami, menggunakan sistem FPV memudahkan untuk mendapatkan umpan video dari robot tanpa pemrograman atau komponen penyolderan. Robot memiliki kamera dan pemancar video. Kami hanya perlu menyambungkan daya ke sistem ini dan sistem ini akan mulai mentransmisikan umpan video menggunakan 5.8GHz.
GCS memiliki layar LCD dengan penerima video built-in 5.8GHz. Setelah Anda menyalakan layar, itu akan mulai menampilkan umpan kamera.
Membangun Kendaraan Darat
Struktur utama dibuat dengan bar kotak baja 0,75 '. Berikut ini adalah desain yang digunakan untuk robot kami tetapi tidak terbatas pada itu. Ubah desain sesuai kebutuhan Anda.
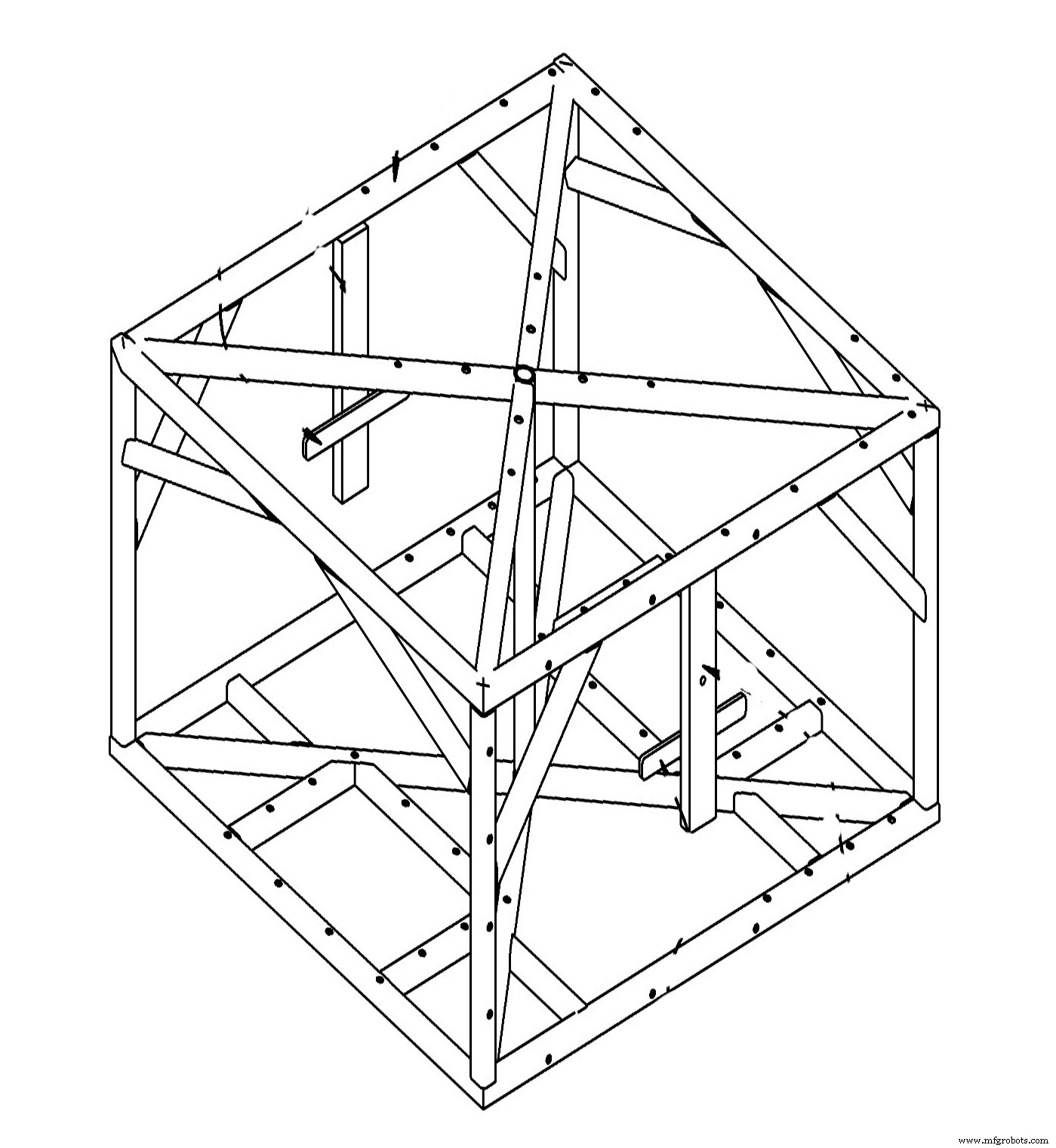
Rangka harus memiliki ruang dan mekanisme untuk memasang dua motor dan dua roda kastor di bagian bawah. Di dalam struktur, harus ada mekanisme untuk mengunci baterai timbal-asam. Di robot kami, kami telah menggunakan papan penutup untuk menutupi bingkai.
Kabel dari dua motor terhubung ke pin output dari driver motor. Prosedur ini dapat dengan mudah ditemukan di internet, oleh karena itu tidak dimaksudkan untuk menjelaskan keseluruhan prosedur.
Skema sistem kontrol elektronik terlampir di bagian terakhir. Saluran 1 - saluran 4 pin sinyal PWM penerima RC terhubung ke papan Arduino dari pin 18 - 21. Setiap saluran dikonfigurasi dengan cara berikut dalam kode. Anda dapat mengubahnya sesuai keinginan.
- Ch 1 - sakelar UV
- Bab 2 - Sakelar Persenjataan Robot
- Bab 3 - Perintah Maju/Mundur
- Bab 4 - Perintah Belok Kiri/Kanan
Ini juga dapat diubah saat membangun GCS.
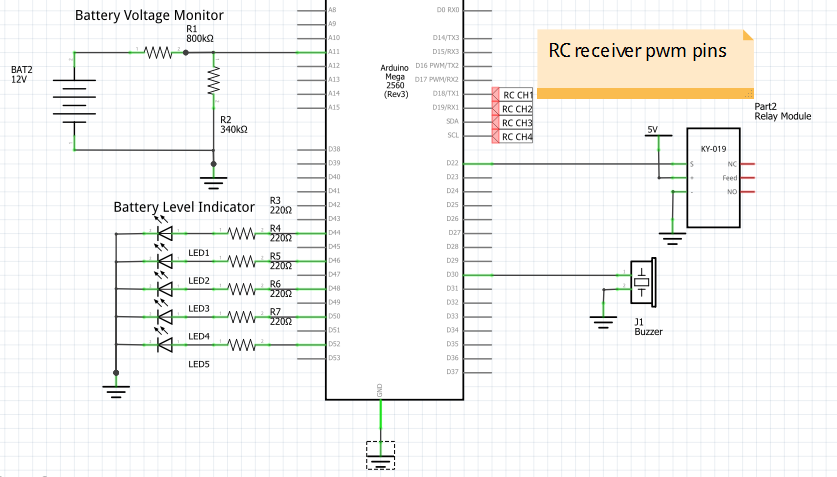
Pin dari driver motor terhubung ke pin Arduino 3 - 11 seperti yang ditunjukkan pada skema.
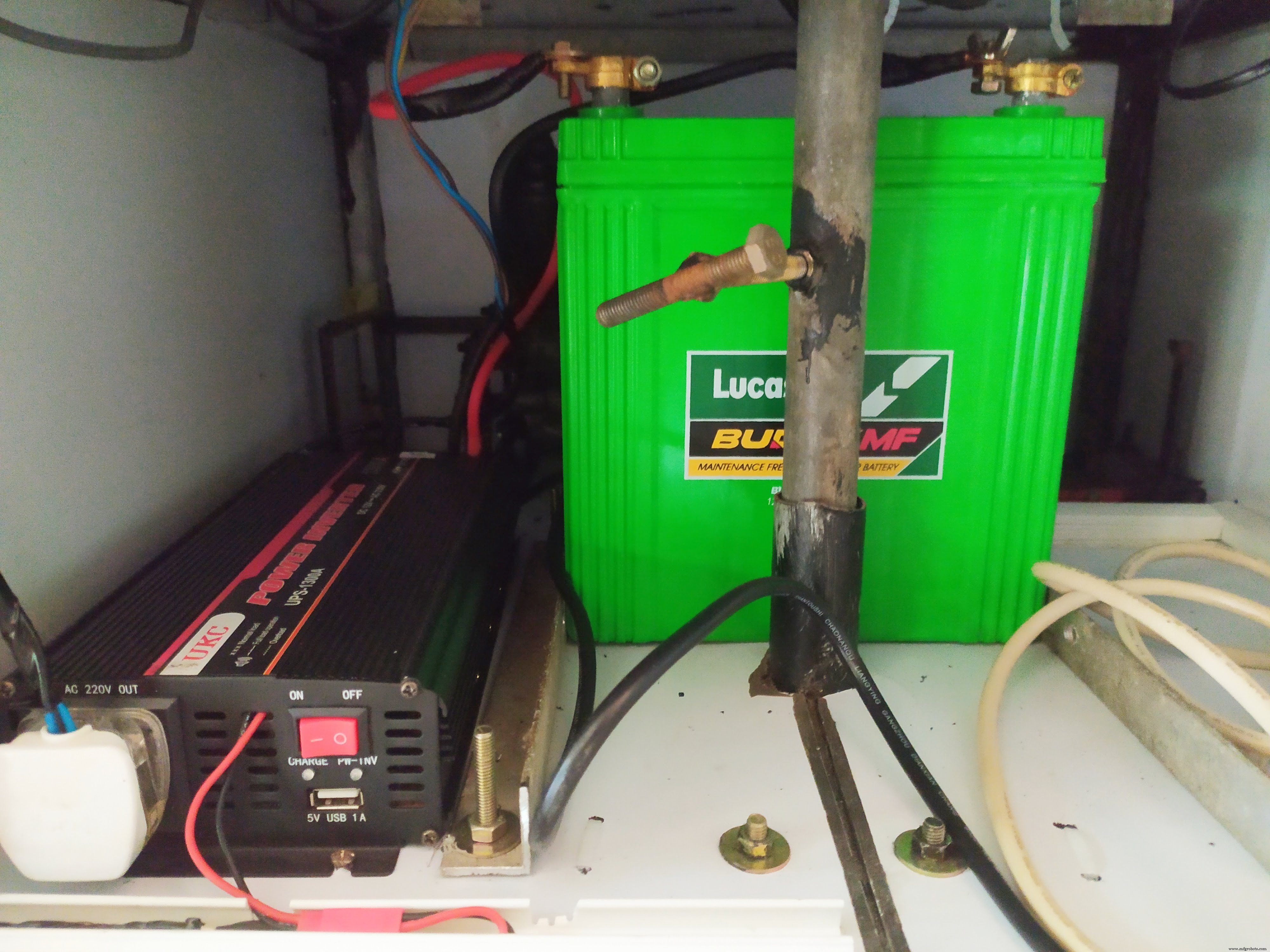
Untuk mengubah 12v ke AC 230V untuk menyalakan lampu UV, rangkaian inverter digunakan di sini. Kami telah membeli unit inverter yang tersedia secara komersial dengan pengisi daya bawaan. Ini membantu menghindari kerumitan sistem elektronik dengan memungkinkan kami mengisi baterai timbal-asam menggunakan titik daya yang ada.

Dalam kasus kami, kami telah menggunakan inverter gelombang sinus yang dimodifikasi yang memiliki efisiensi sekitar 70%. Untuk menyalakan semua ballast elektronik dengan efisiensi 70% watt yang dibutuhkan dari inverter adalah 470W. Dengan semua margin keamanan, kami membeli inverter 1kW.,
Terminal baterai terhubung ke input 12V dan ballast E. terhubung ke port output AC. Tombol on/off dilepas. Ada 3 kabel yang tersedia di sakelar; kabel biasa, kabel ground, dan kabel power on. 3 kabel ini terhubung ke sakelar relai dengan cara berikut untuk mengontrol lampu UV dari papan Arduino.
- Kabel biasa -> Umum
- Kabel pembumian -> NC
- Menghidupkan kabel -> TIDAK
Kami telah menyertakan sakelar daya sistem, sakelar daya UV, dan sakelar pemutus darurat untuk mematuhi robot dengan standar industri.
Membangun menara lampu UV
Bagian tengah menara berisi lembaran Aluminium. Sebuah lembaran digulung menjadi silinder dengan diameter 15 cm. Dua papan cladding berbentuk lingkaran dengan diameter 30 cm ditempatkan di atas dan di bawah silinder. Ini digunakan sebagai dudukan lampu UV. Kedua papan kelongsong dibor lubang 19mm agar sesuai dengan sinar UV. E.ballast dipasang di dalam silinder Aluminium menggunakan selotip dua sisi.


Sistem kamera FPV dipasang di atas menara dan dua kabel dibawa ke bawah melalui silinder.
Membangun Stasiun Kontrol Darat 
Berikut adalah komponen yang diperlukan untuk Ground Control Station (GCS).
- Pemancar RC 4Ch 2,4GHZ
- Layar FPV
- 2 X Sakelar sakelar
- 1 X Sakelar daya
- 18650 Sel Baterai
- Modul Sistem Manajemen Adonan 3 Sel untuk 18650
- Catu Daya Mode Sakelar 12V, 5A
Pemancar Rc berisi 2 joystick dan beberapa sakelar. Di sini, minat kami hanya pada satu joystick, rangkaian dan LED indikator. Lepaskan penutup pemancar dan amati bagaimana joystick dirasakan oleh sirkuit. Setiap joystick berisi dua potensiometer yang terhubung ke papan sirkuit. Berdasarkan posisi joystick, potensiometer mengubah resistansinya sehingga rangkaian dapat membaca posisi joystick.
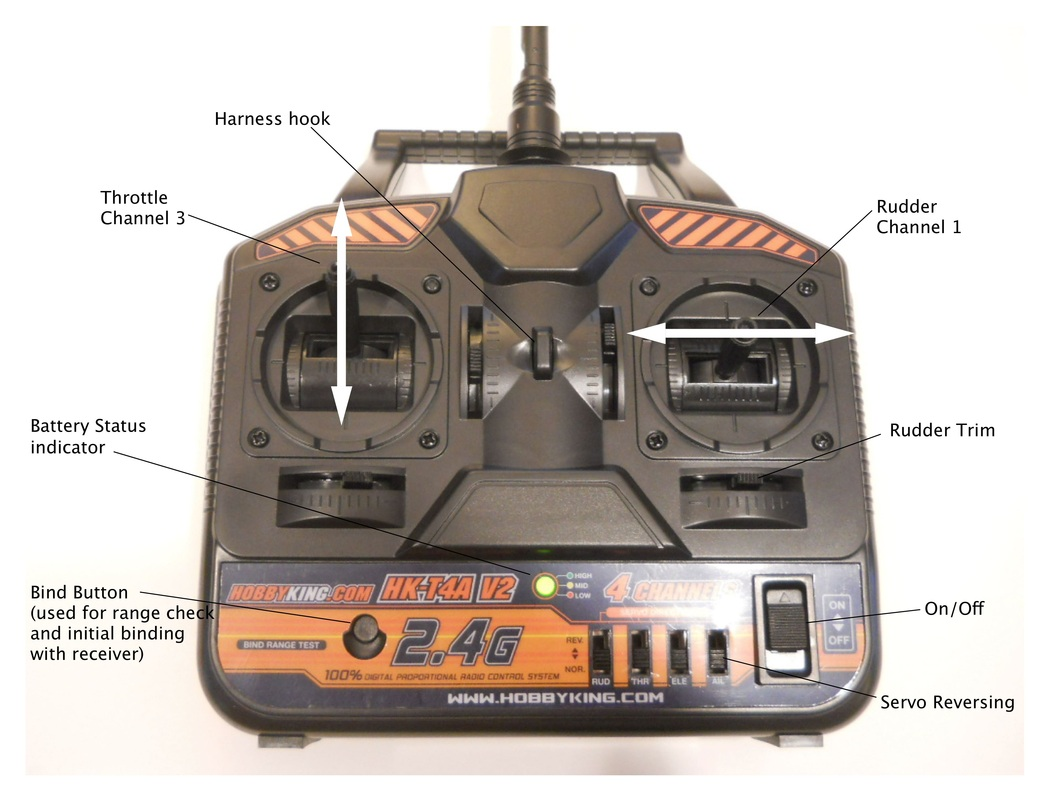
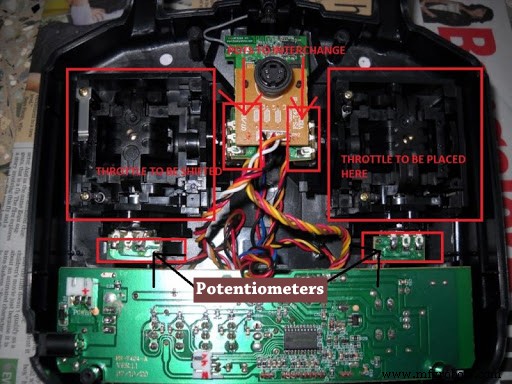
Lepaskan satu joystick dan dua potensiometernya. Solder ujung kabel masing-masing ke dua sakelar sakelar. Sekarang kami memiliki satu joystick dan dua sakelar sakelar untuk mengontrol semua 4 saluran. Satu sakelar bertindak sebagai sakelar yang mempersenjatai robot dan yang lainnya bertindak sebagai sakelar kontrol lampu UV. LED indikator dapat digunakan sebagai monitor baterai GCS karena berubah warna menjadi merah saat baterai hampir habis.
Sekarang kita perlu membuat catu daya untuk pemancar dan untuk layar FPV. Tegangan sel baterai 18650 adalah 3,7V. Ketika terisi penuh menjadi 4.2V. Untuk ini kami menghubungkan 3 sel secara seri untuk mendapatkan sekitar 12V. Dalam kasus kami, kami menggunakan sel dengan kapasitas 1000mAh. Untuk meningkatkan waktu pengoperasian GCS, kami menggunakan 9 baterai, 3, rangkaian sel yang terhubung seri secara paralel untuk mendapatkan kapasitas 3000mAh. Kemudian hubungkan modul BMS untuk melindungi baterai.
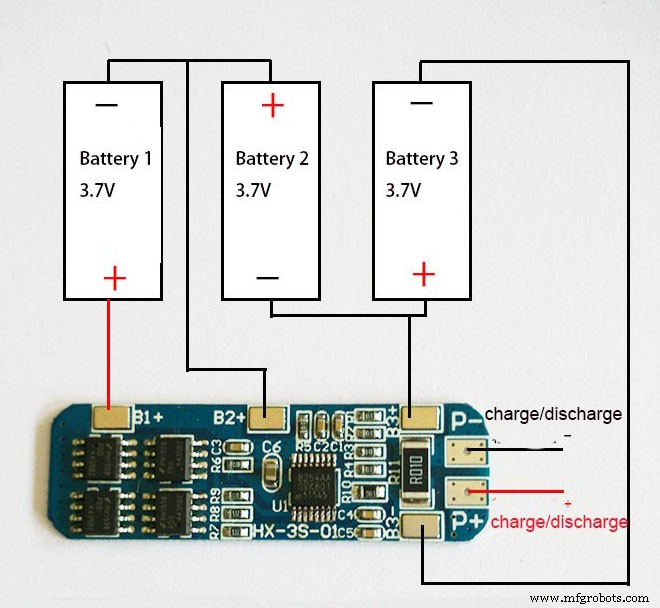
P+ dan P- terhubung ke input daya Pemancar dan input daya layar FPV. 12V switch mode power supply (SMPS) dilengkapi dengan potensiometer untuk mengatur tegangan output dalam kisaran terbatas. Atur ke 12.8 dan hubungkan output tegangan ke P+ dan P- dari BMS. Ini akan membantu mengisi daya baterai saat SMPS dicolokkan.
Anda dapat mendesain enklosur untuk ini sesuai dengan preferensi Anda.
Pengkodean
Tugas pertama dari kode ini adalah membaca input saluran RC. Karena kami menggunakan penerima PWM, saya telah menggunakan interupsi untuk membaca nilai PWM. Untuk mempermudah, saya telah menyertakan pustaka PWM untuk menggunakan interupsi dengan mendefinisikan pin yang terhubung dengan cara berikut.
PWM ch1(18); // Atur pin 18 untuk input
PWM ch2(19); // Atur pin 19 untuk input
PWM ch3(20); // Atur pin 20 untuk input
PWM ch4(21); // Siapkan pin 21 untuk input
Dalam urutan startup, kode memeriksa tegangan baterai dan apakah sakelar UV dihidupkan. Jika mendeteksi salah satu, prosedur startup akan menunggu di sana sampai semuanya diperbaiki.
//cek tegangan baterai
battery_voltage_monitor();
sementara(baterai ==benar){
battery_voltage_monitor();
low_battery_notification();
}
//verifikasi uv swtich dimatikan
rc_read();
sementara(uv_pwm> switch_on_pwm){
rc_read();
uv_on_warning_at_startup(); //nada buzzer
}
Saat menjalankan motor, tegangan baterai turun secara kritis hanya untuk saat itu. Untuk menghindari alarm tegangan rendah terpicu setiap kali kita menggerakkan robot, bagian pemantauan baterai hanya berjalan saat robot tidak bergerak.
if (robot_moving ==false){
battery_voltage_monitor(); //memantau baterai saat robot tidak bergerak
}
Semua fungsi lainnya termasuk mengendalikan driver motor, menghasilkan nada dengan buzzer dan mengendalikan kerja relai dengan cara biasa. Anda dapat mengikuti tutorial umum tentang topik di atas jika Anda tidak mengetahuinya.
Prosedur Operasi
Prosedur penyalaan
Pengontrol GCS
1. Nyalakan sakelar utama.
2. Pastikan Sakelar Persenjataan Robot dan Sakelar Lampu UV dimatikan. (Pada posisi bawah).
Robot
1. Nyalakan sakelar daya.
2. Tunggu nada awal.
3. Tunggu sistem nada oke.
Mengontrol Robot
1. Nyalakan Sakelar Persenjataan Robot.
2. Gerakkan joystick untuk menggerakkan robot.
3. Nyalakan UV Switch untuk menyalakan lampu UV. Saat Sakelar Persenjataan Robot dalam posisi mati, sakelar UV tidak berfungsi.
Indikator level baterai
1. Pastikan baterai memiliki setidaknya 4 batang yang berkedip untuk mengoperasikan robot.
2. Saat baterai hampir habis, bel berbunyi bip dengan dua bar terakhir dari indikator level baterai berkedip.
Prosedur Pengisian Daya
1. Matikan robotnya.
2. Matikan GCS.
3. Pasang inverter ke power point. (Biasanya inverter memiliki indikator tingkat pengisian daya bawaan)
Pertimbangan Umum
1. Menggunakan di area ramai
Sinar ultraviolet berbahaya bagi mata dan kulit manusia. Terpapar cahaya dalam jarak pendek (kurang dari 3m) selama lebih dari 60 detik dapat merusak mata dan dapat menyebabkan iritasi kulit. Namun sinar Ultraviolet tidak dapat menembus media padat apapun. Melihat sinar UV melalui kaca transparan tidak mempengaruhi mata atau tubuh manusia.
2. Materi dan perangkat sensitif
Plastik lunak sangat sensitif terhadap sinar Ultraviolet. Plastik lunak biasanya digunakan dalam mainan dan pembungkus makanan. Oleh karena itu perangkat tidak dapat digunakan di toko mainan, supermarket, dan di mana barang-barang di atas tersedia. Namun, lampu UV dapat digunakan untuk mendisinfeksi lantai di area yang disebutkan di atas.
3. Kemampuan untuk digunakan di rumah sakit
Di lingkungan rumah sakit, sinar UV sangat membantu untuk mendisinfeksi permukaan dengan sentuhan tinggi dalam waktu yang sangat singkat. Tetapi efektivitas sinar UV untuk peralatan medis dan obat-obatan harus dipertimbangkan dalam skenario ini.
Peralatan medis dengan penutup plastik terbuat dari plastik keras saat menjalani perawatan radiasi selama proses pembuatan. Selanjutnya, tidak ada efek yang terbukti untuk efektivitas sinar UV untuk obat yang disimpan di rumah sakit.
Selanjutnya, semua peralatan medis stainless steel dan masker N95 dapat disterilkan menggunakan perangkat yang sama.
4. Efektivitas untuk area yang diarsir
Sinar ultraviolet memantul dari permukaan sama seperti cahaya tampak. Oleh karena itu, daerah yang tidak mendapatkan sinar UV langsung, mendapatkan sinar UV yang dipantulkan. Namun, area yang sangat tertutup atau teduh tidak mendapatkan sinar UV yang efektif. Area ini juga tidak didesinfeksi dengan metode berbasis cairan desinfeksi.
5. Pertimbangan lain
Sinar UV menghasilkan Ozon saat bekerja di lingkungan tertutup untuk waktu yang lebih lama. Sebagai praktik umum, semua lingkungan tertutup diberi ventilasi selama 20 menit setelah disterilkan dengan lampu UV.
Kode
Kode untuk Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-Robot Skema
uv-x_Q9R5T59Q32.fzz




