





Proses manufaktur
- Kontrol Jarak Jauh Universal menggunakan Arduino, 1Sheeld, dan Android
- Kontrol Penerima Koin dengan Arduino
- Menggunakan IoT untuk Mengontrol Lengan Robot dari Jarak Jauh
- Hambatan Menghindari Robot Dengan Motor Servo
- Arduino dengan Bluetooth untuk Mengontrol LED!
- Mengontrol Robot Roomba Dengan Arduino Dan Perangkat Android
- Lengan Robot Terkendali Nunchuk (dengan Arduino)
- Arduino Nano:Kontrol 2 Motor Stepper Dengan Joystick
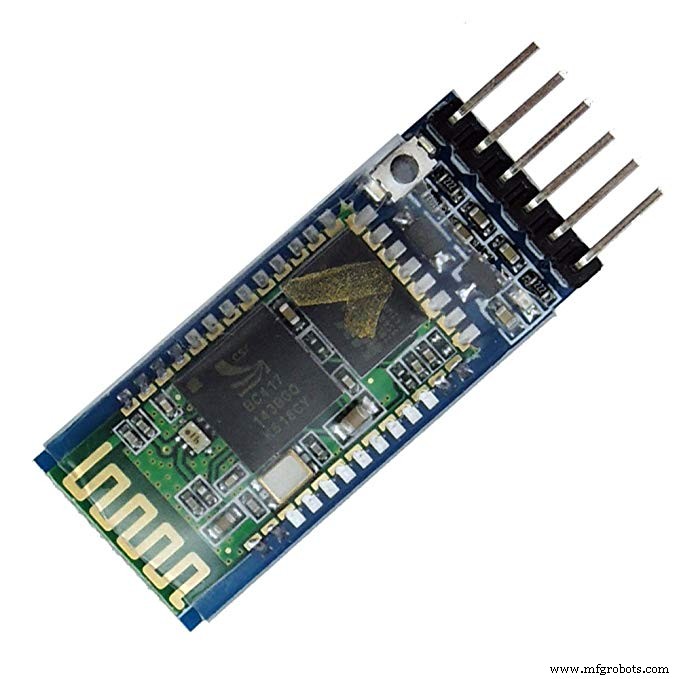
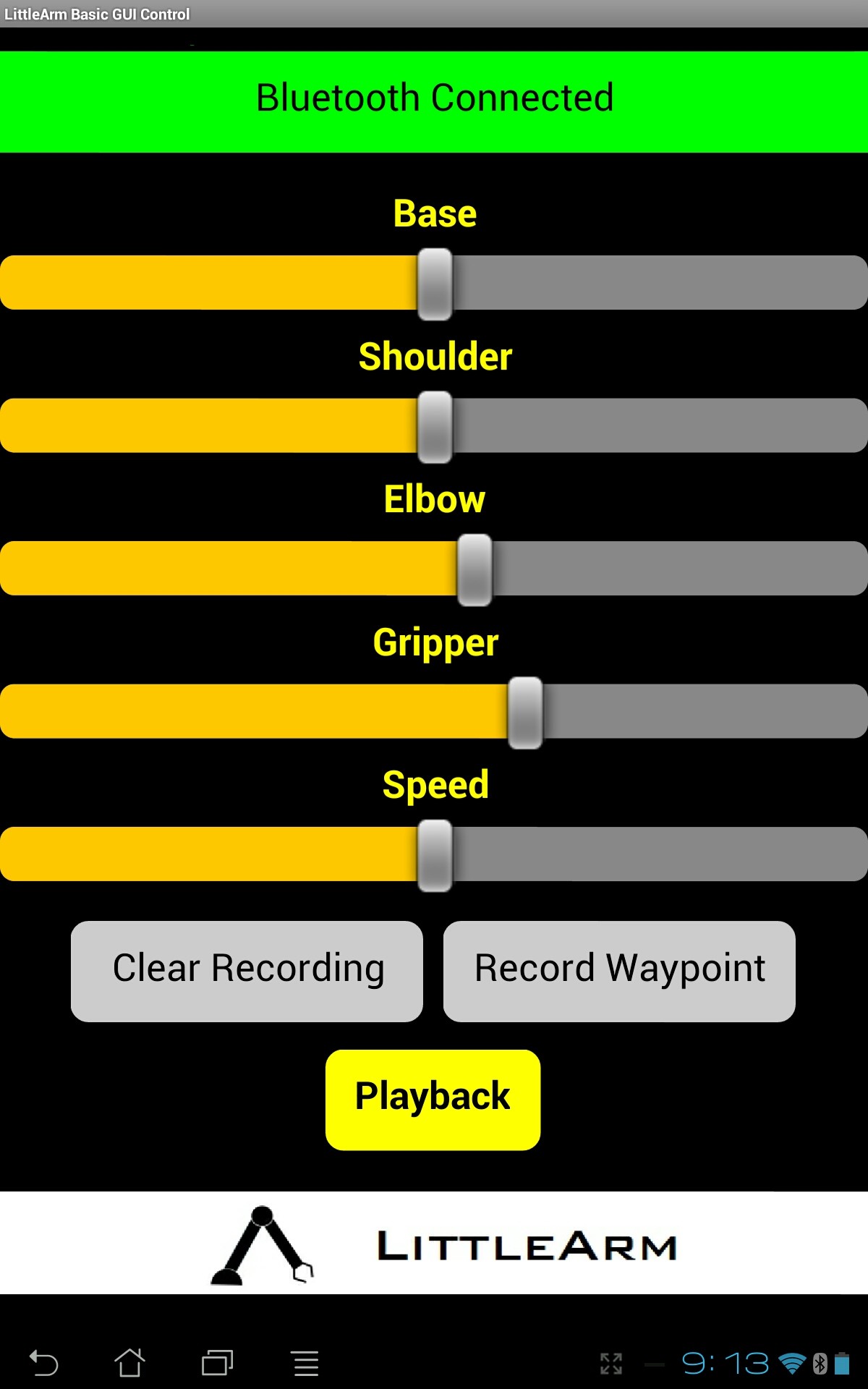
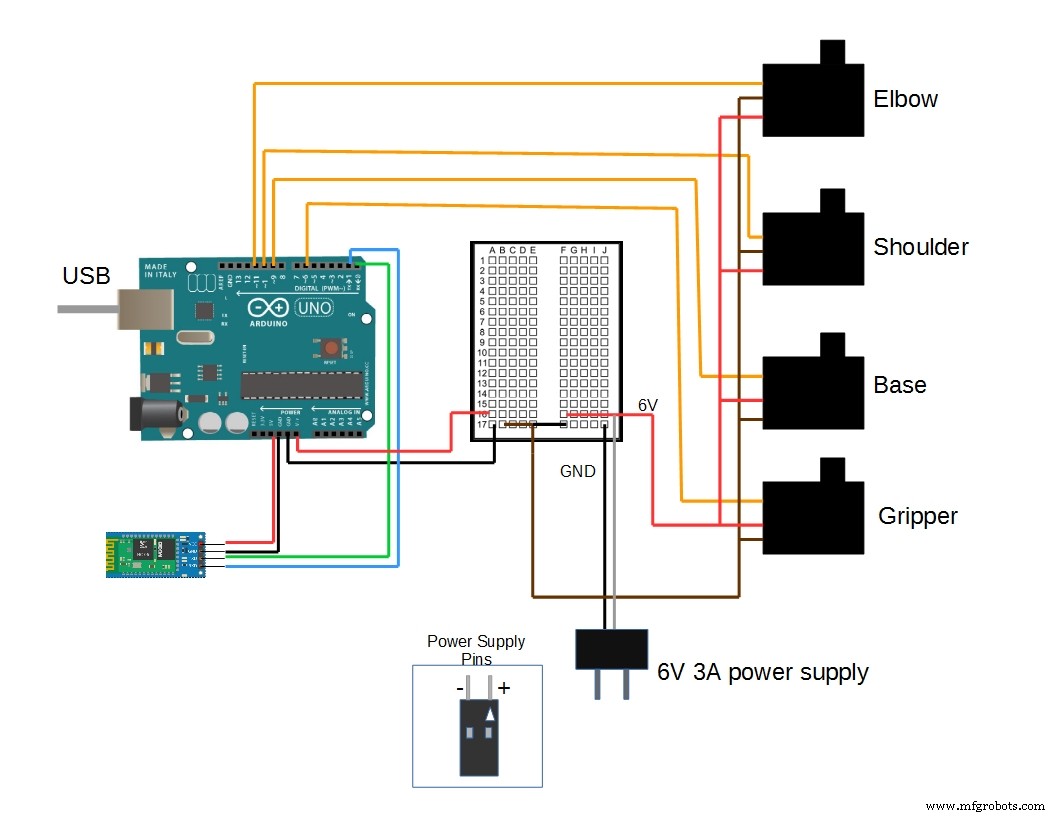
- Littlearm 2C:Membangun Lengan Robot Arduino Cetak 3D
- ThimbleKrox - Kontrol Mouse dengan Jari Anda