Tentang proyek ini
Proyek ini menunjukkan cara mengontrol beberapa servomotor dari jarak jauh di jaringan Wi-Fi, menggunakan browser internet biasa (Firefox, misalnya). Ini mungkin digunakan di beberapa aplikasi:mainan, robot, drone, kamera pan/tilt, dll.
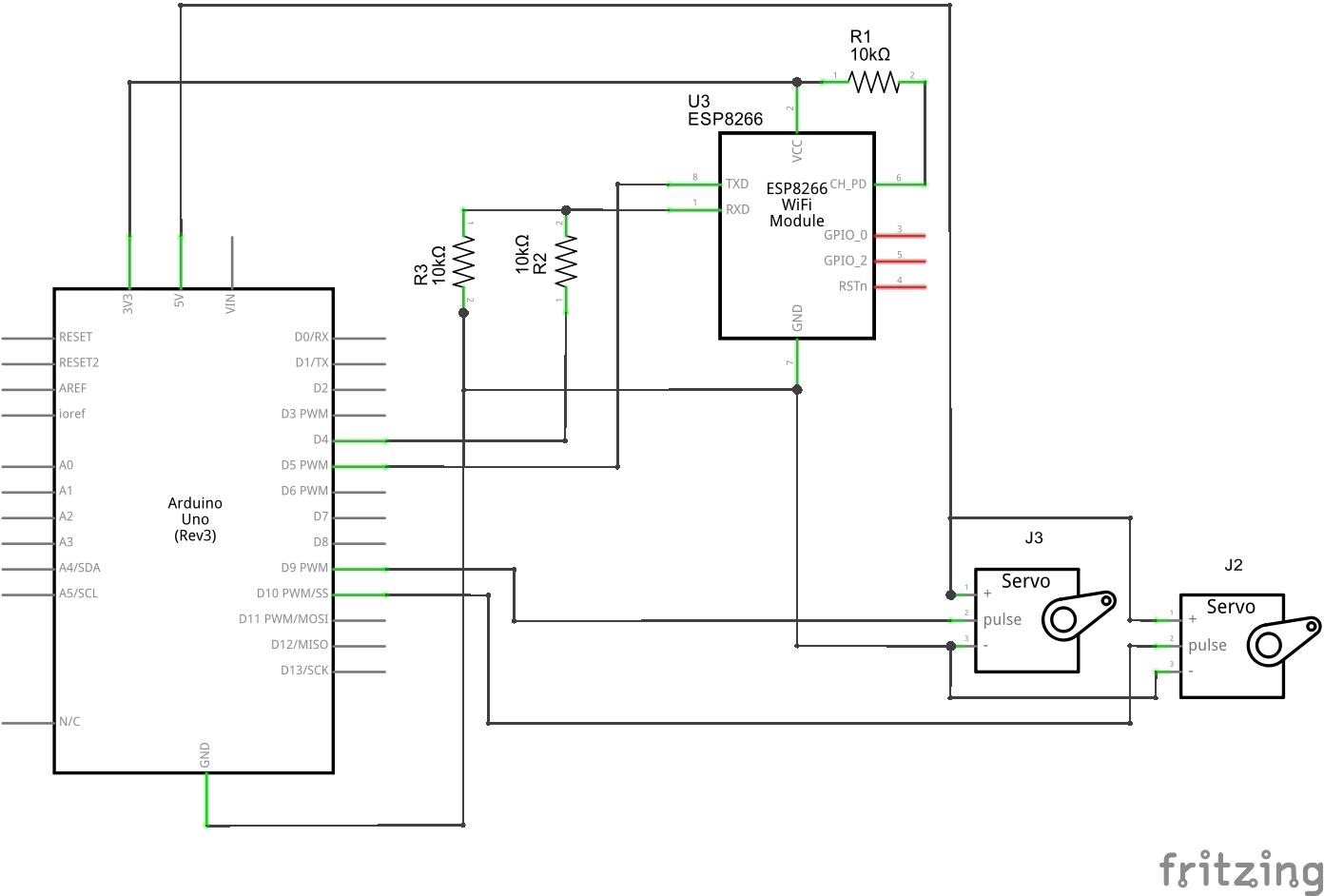
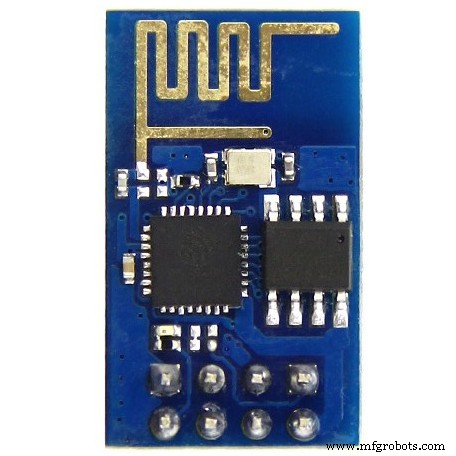
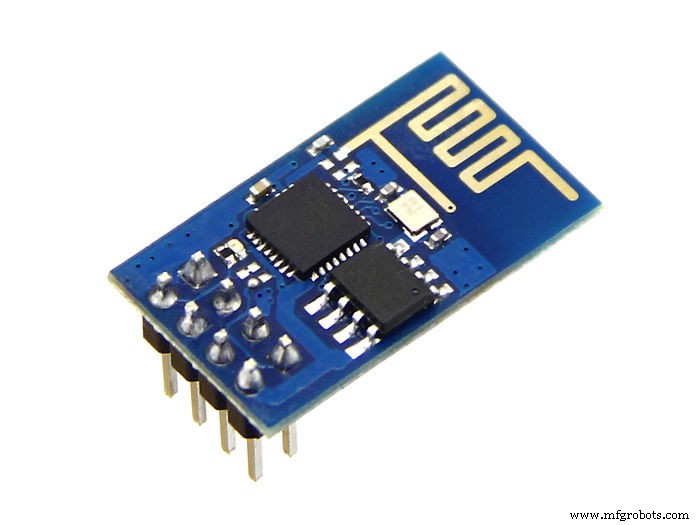
Motor terpasang ke Arduino Uno, yang menghubungkan jaringan Wi-Fi melalui modul ESP-8266. Antarmuka kontrol dirancang dengan HTML dan jQuery.
Tutorial Miguel (http://allaboutee.com/2015/01/02/esp8266-arduino-led-control-from-webpage/), yang menunjukkan cara menyalakan/mematikan LED menggunakan ESP-8266, menjadi inspirasi untuk ini pos.
Teknik yang ditunjukkan di sini digunakan dalam salah satu proyek saya:"Robô da Alegria". Anda mungkin menemukan lebih banyak tentang ini di salah satu tautan berikut:
https://hackaday.io/project/12873-rob-da-alegria-joy-robot
https://www.facebook.com/robodaalegria/
https://github.com/ferauche/RoboAlegria
Langkah 1:Elektronik 

Untuk proyek ini, Anda memerlukan komponen berikut:
- Protoshield (untuk versi yang lebih ringkas) atau papan tempat memotong roti biasa (beli)
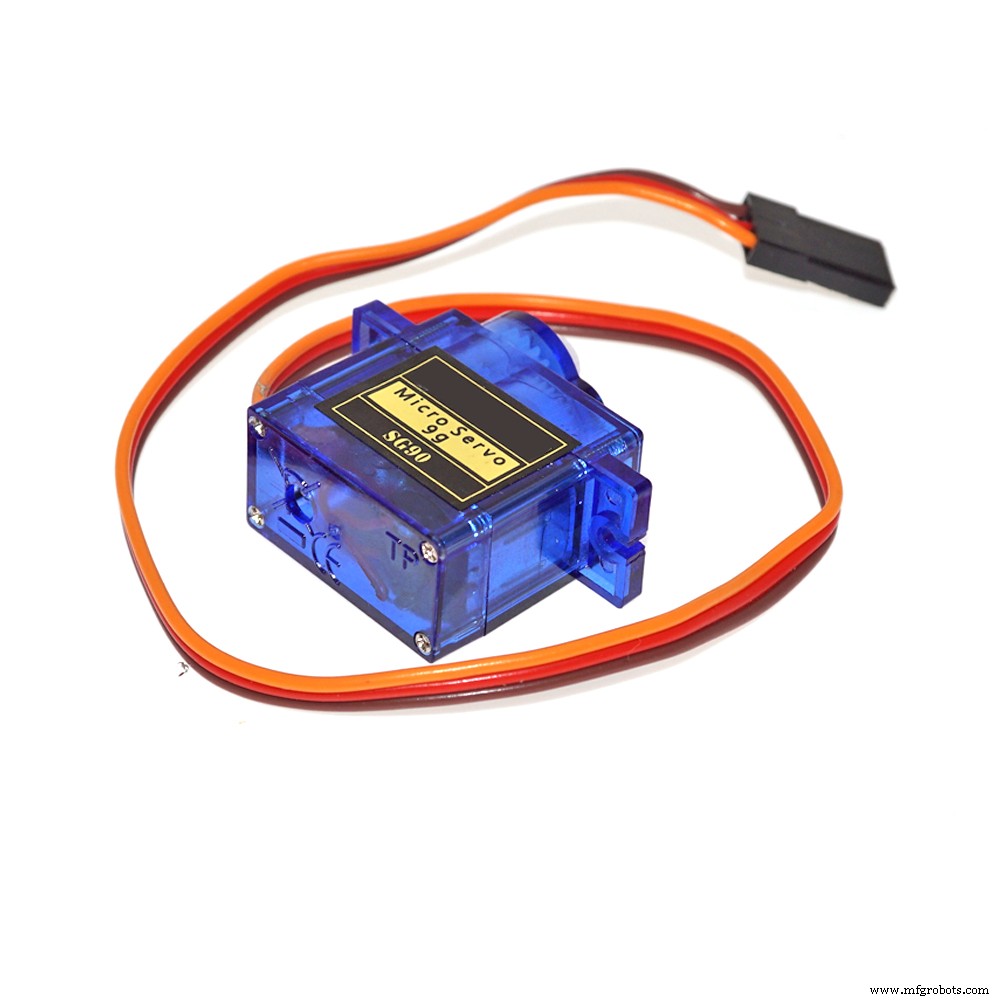
- SG90 servomotor (x2) (beli)
- Komputer (untuk mengkompilasi dan mengunggah kode Arduino)
SG90Servo.pdf
Anda tidak memerlukan alat khusus untuk perakitan proyek ini. Semua komponen dapat ditemukan secara online di toko e-commerce favorit Anda. Sirkuit ini ditenagai oleh port USB (terhubung ke komputer atau pengisi daya telepon biasa), tetapi Anda juga dapat menambahkan catu daya DC eksternal atau baterai yang terhubung ke soket daya Arduino.
Langkah 2:Perakitan 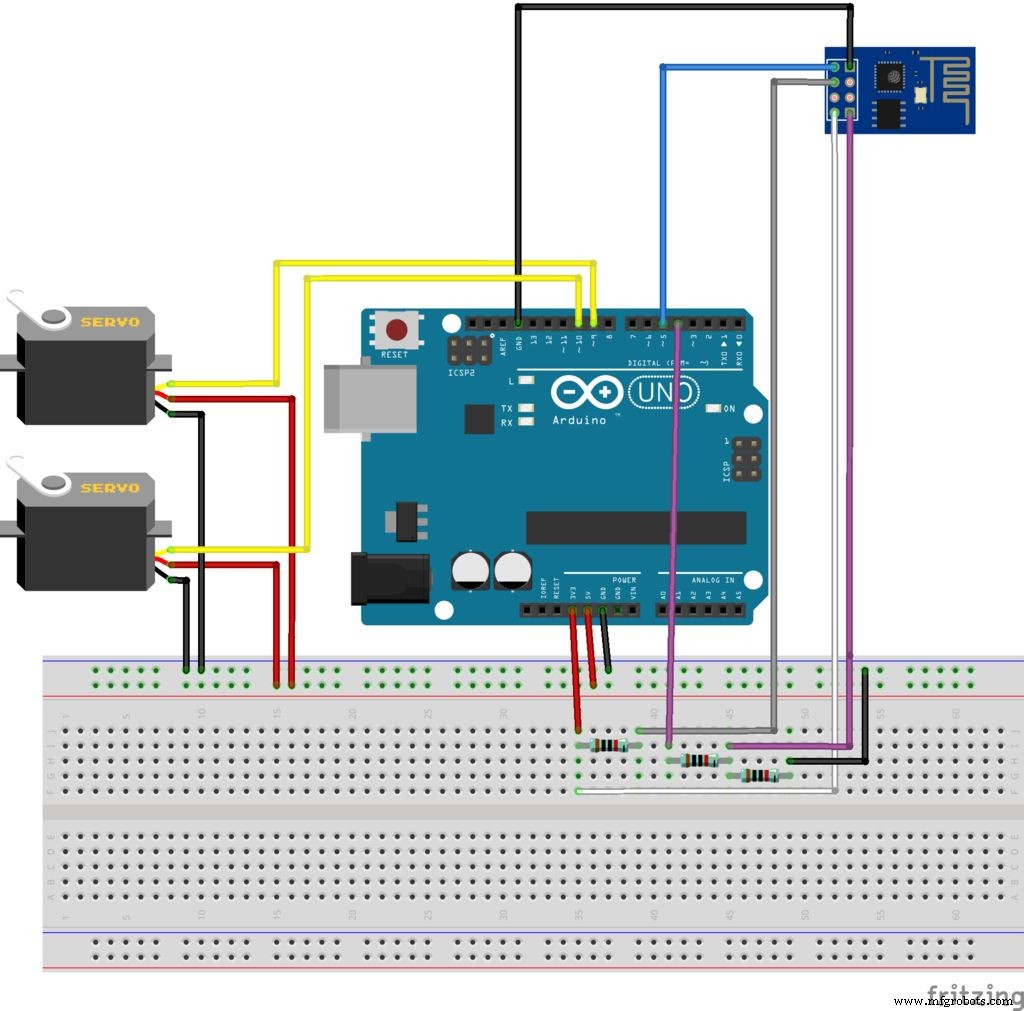
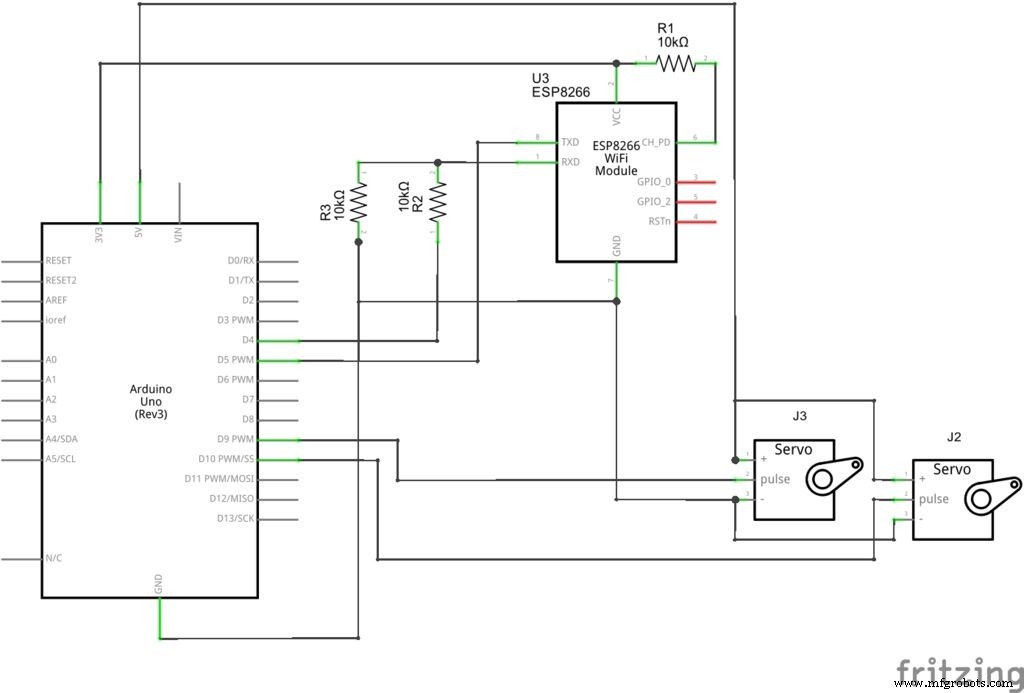
Hubungkan semua komponen sesuai dengan skema. Anda memerlukan beberapa kabel jumper untuk menghubungkan modul ESP-8266 dan servomotor. Anda dapat menggunakan pelindung proto (untuk sirkuit yang lebih ringkas), papan tempat memotong roti biasa, atau mendesain pelindung Arduino milik Anda sendiri.
Colokkan kabel USB ke board Arduino Uno dan lanjutkan ke langkah berikutnya.
Langkah 3:Kode Arduino
Instal Arduino IDE terbaru. Dalam proyek ini perpustakaan servo.h digunakan untuk mengontrol servos. Untuk menghindari konflik antara modul Wi-Fi dan port USB komputer selama pengunggahan kode, softserial perpustakaan digunakan. Tidak ada perpustakaan tambahan yang diperlukan untuk komunikasi dengan modul ESP-8266. Silakan periksa baud rate ESP8266 Anda dan atur dengan benar dalam kode.
Beberapa servomotor mulai jitter dan mengeluarkan suara aneh ketika posisinya mendekati batas (0 dan 180 derajat). Untuk menghindarinya, sudut dibatasi antara 10 dan 170 derajat baik di kode Arduino maupun di antarmuka kontrol (nanti).
Sayangnya, servo.h perpustakaan dan softserial.h perpustakaan menggunakan timer yang sama dari mikrokontroler. Ini dapat menyebabkan jitter di servo setiap kali Arduino berkomunikasi dengan ESP-8266. Untuk menghindari itu, servos dilepaskan dari Arduino setelah setiap perintah. Anda juga dapat menghubungkan modul ke pin serial standar. Dalam hal ini, ingatlah untuk memutuskan sambungan modul sebelum setiap pengunggahan.
Unduh kode Arduino (wi-servo.ino ) dan ganti XXXXX dengan SSID router Wi-Fi Anda dan YYYYY dengan kata sandi router. Hubungkan papan Arduino ke port USB komputer Anda dan unggah kodenya.
FASLU1KIR9EDSUP.ino
Langkah 4:Antarmuka 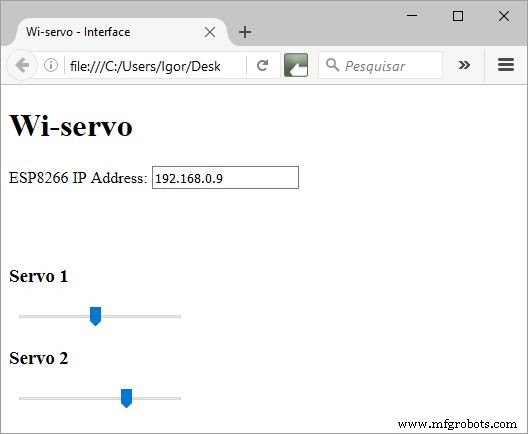
Antarmuka HTML dirancang untuk mengontrol servomotor. Dalam contoh ini, dua servo digunakan, tetapi lebih banyak yang dapat ditambahkan ke Arduino Uno (saya menguji hingga empat motor).
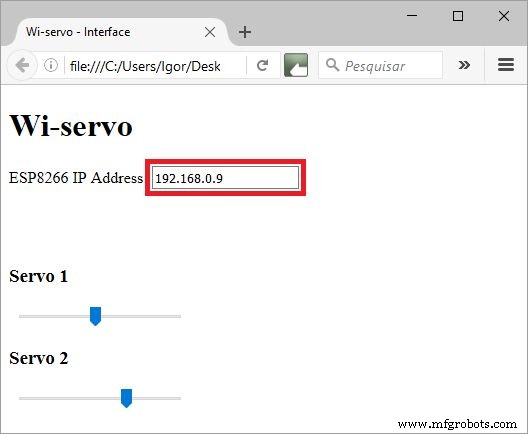
Formulir kotak teks digunakan untuk memasukkan alamat IP modul ESP. Unduh Wi-servo.html dan jquery.js file dan simpan keduanya di folder yang sama.
FH67KRAIQSAB934.zip
Langkah 5:Penggunaan 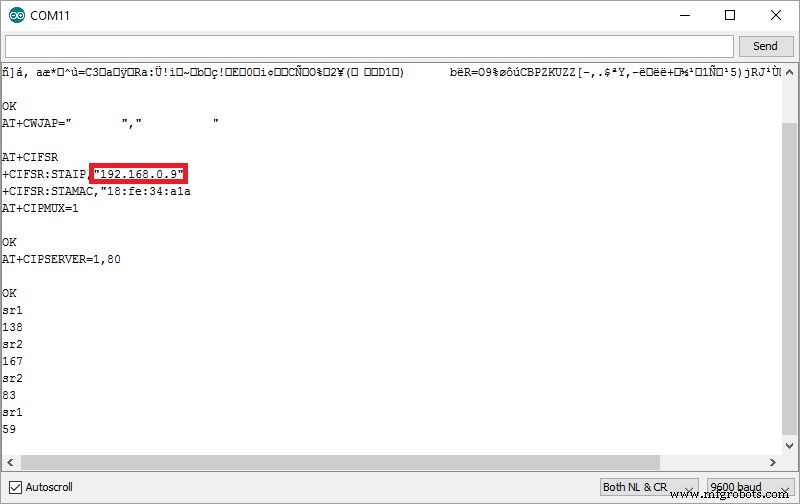
Ketika Arduino dihidupkan ulang, ia akan mencoba menghubungkan jaringan Wi-Fi Anda secara otomatis. Gunakan Serial Monitor untuk memeriksa apakah koneksi berhasil, dan untuk mendapatkan IP mana yang ditetapkan ke ESP-8266 oleh router Anda.
Buka file html di browser internet (Firefox).
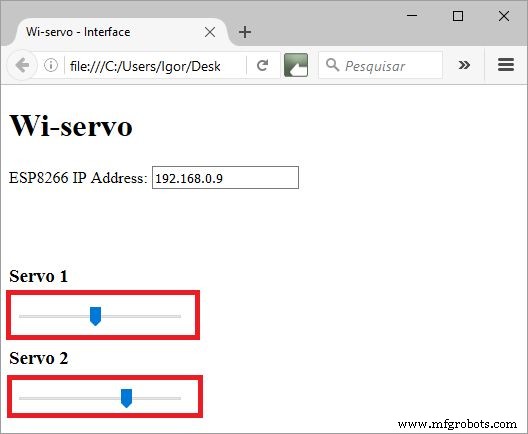
Informasikan alamat IP ESP-8266 Anda di kotak teks dan Anda akan siap untuk pergi. Pilih sudut yang diinginkan untuk setiap servo menggunakan penggeser. Browser akan secara otomatis mengirimkan permintaan ke Arduino saat Anda melepaskan tombol mouse, dan menggerakkan setiap servo.
Kode
Github
https://github.com/ferauche/RoboAlegriahttps://github.com/ferauche/RoboAlegria Skema