Tentang proyek ini
Halo!
Apa pun yang bisa dikendalikan itu hebat. bukan? Kami manusia suka mengendalikan hal-hal dan itulah sebabnya otomatisasi dan robotika sangat menarik.
Tutorial ini akan mengajarkan Anda cara membuat mobil yang dikendalikan Bluetooth Anda sendiri. Jadi mari kita mulai.
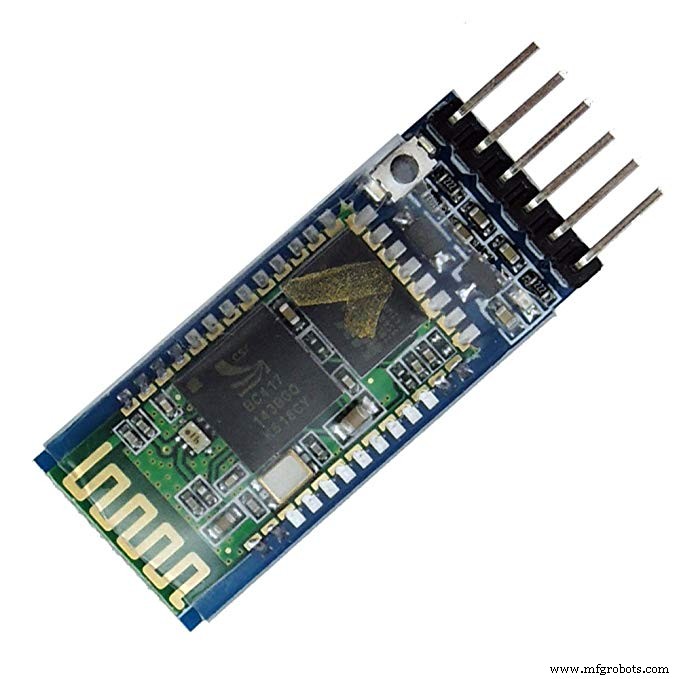
Ini akan menjadi mobil yang dikendalikan Bluetooth sehingga untuk proyek ini kami akan menggunakan modul Bluetooth HC-05 untuk menerima paket data pengontrol.
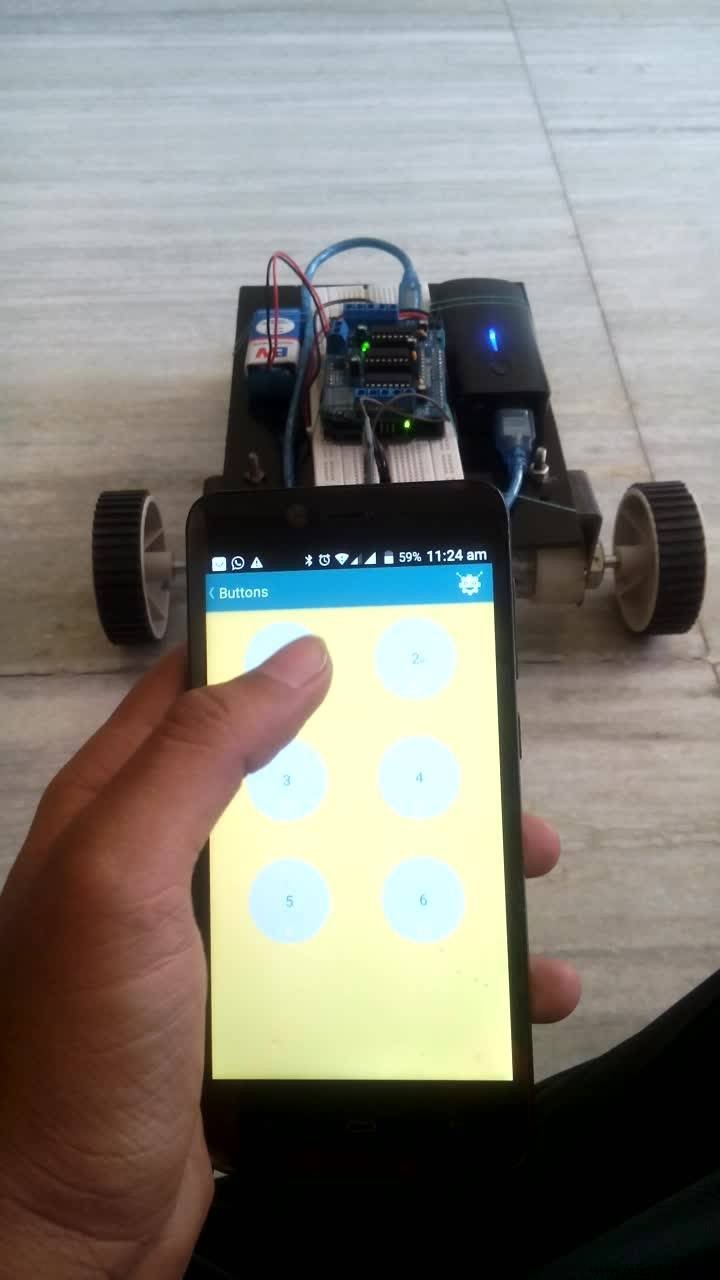
Kami juga membutuhkan aplikasi android yang akan mengirimkan paket data pengontrol ke modul Bluetooth. Kami akan menggunakan aplikasi pihak ketiga (klik di sini untuk mengunduh) untuk tujuan ini.
- -> Oke teman-teman! Mari kita bangun perangkat kerasnya.
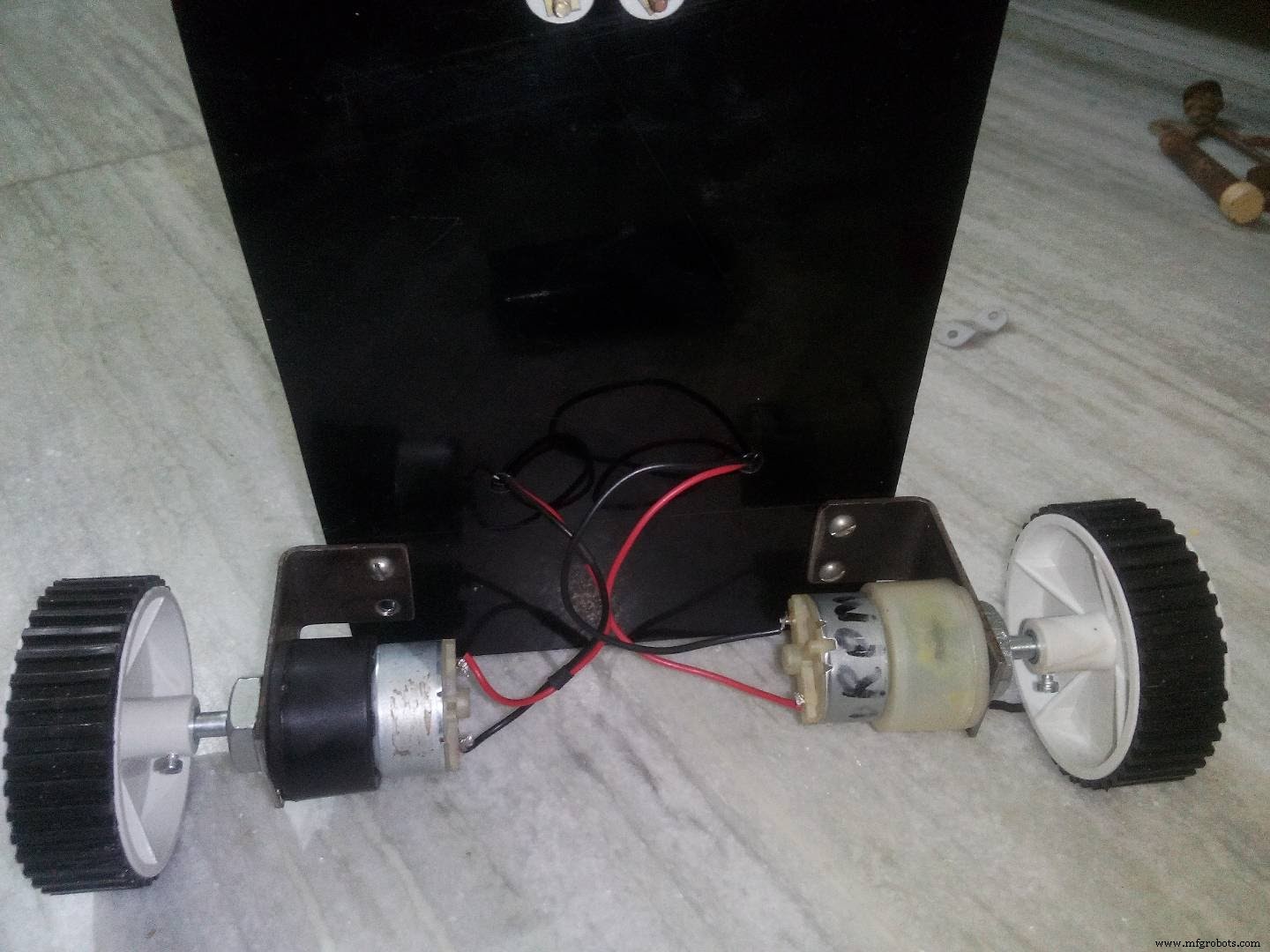
- -> Bodi mobil.
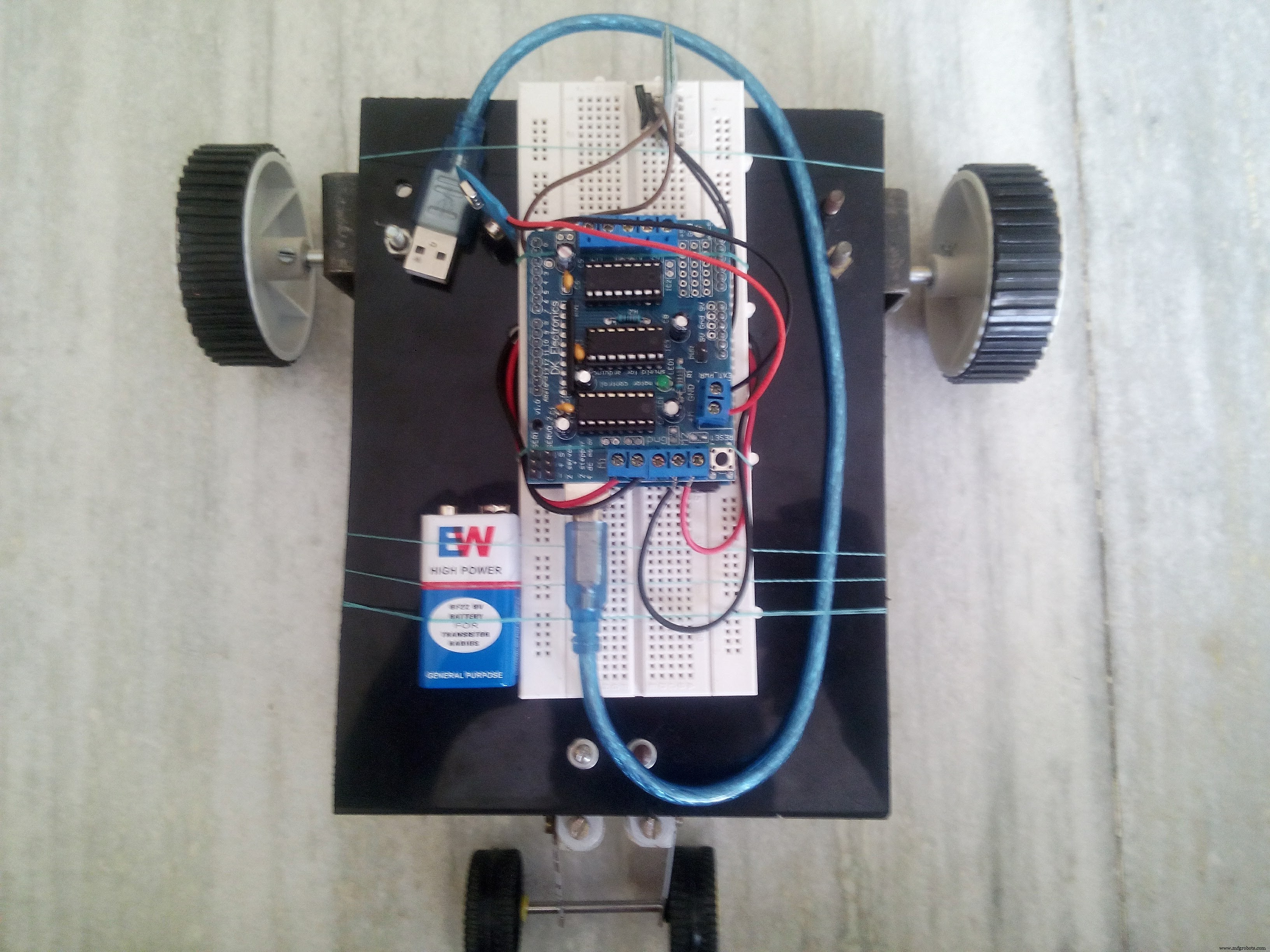
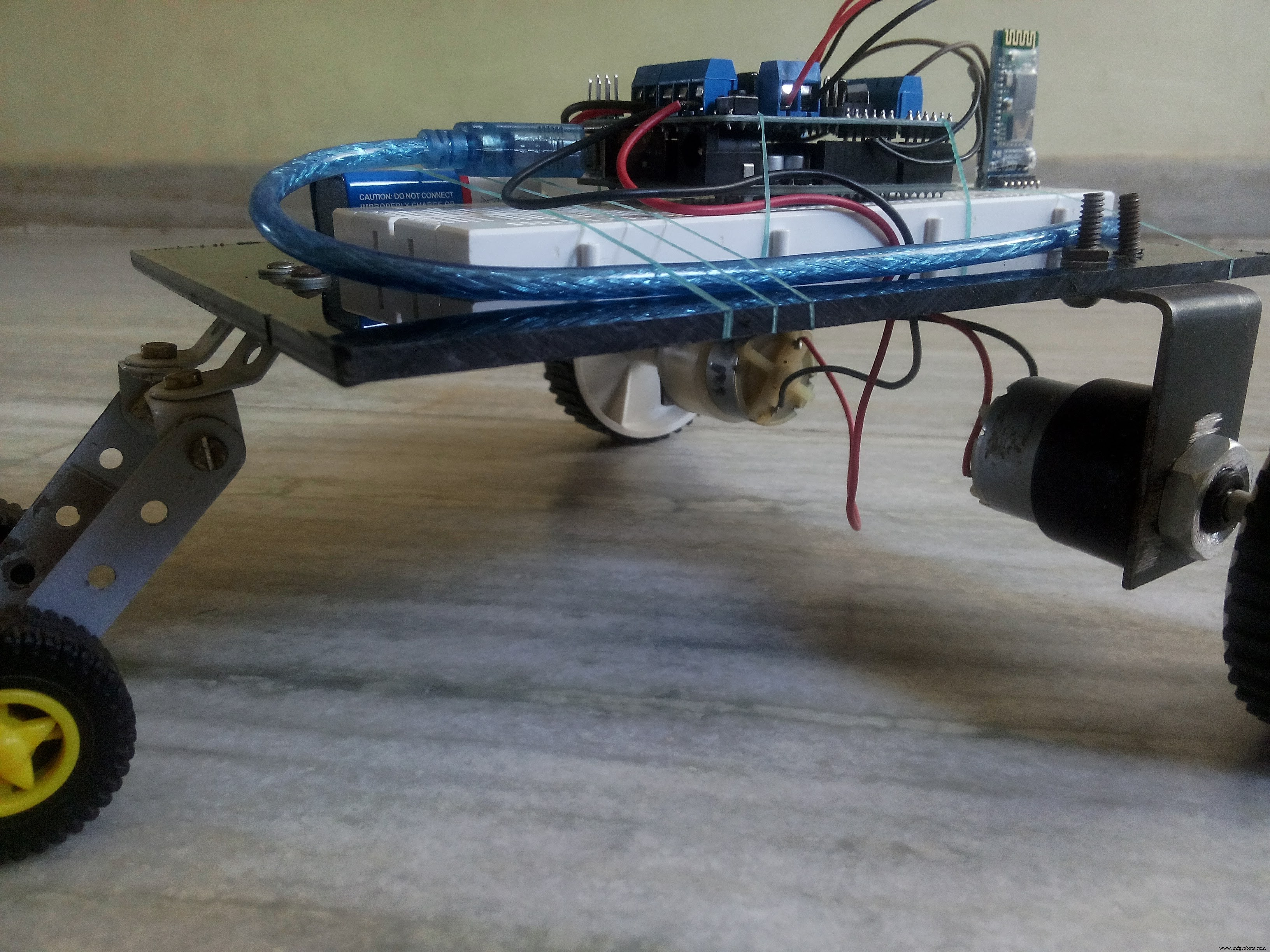
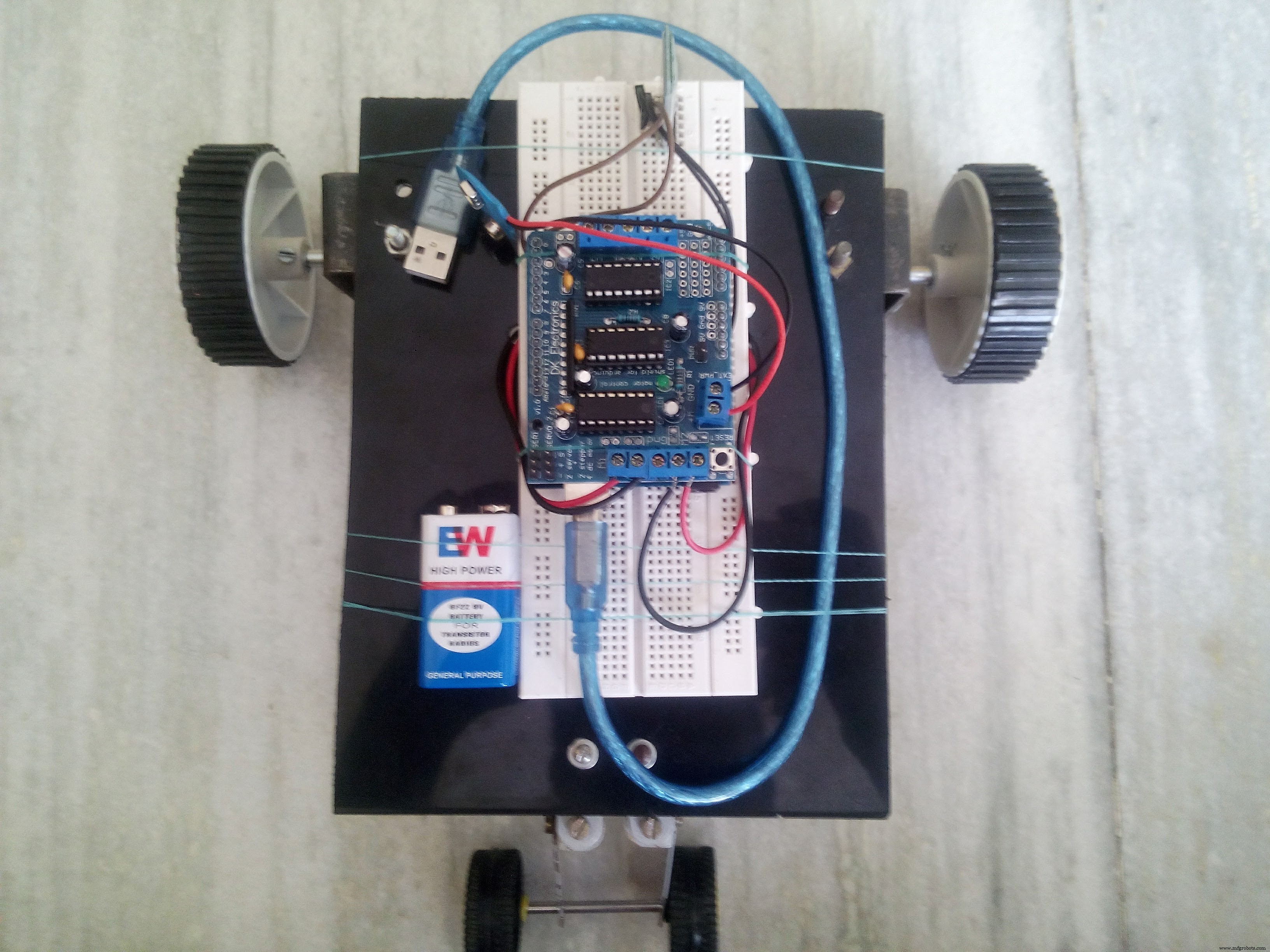
Mobil yang kami bangun untuk proyek ini akan menjadi mobil bermesin ganda. Saya menggunakan dua motor DC 12 v 200 rpm. Anda dapat menggunakan sasis yang sudah jadi. Saya menggunakan lembaran PVC sebagai sasis.
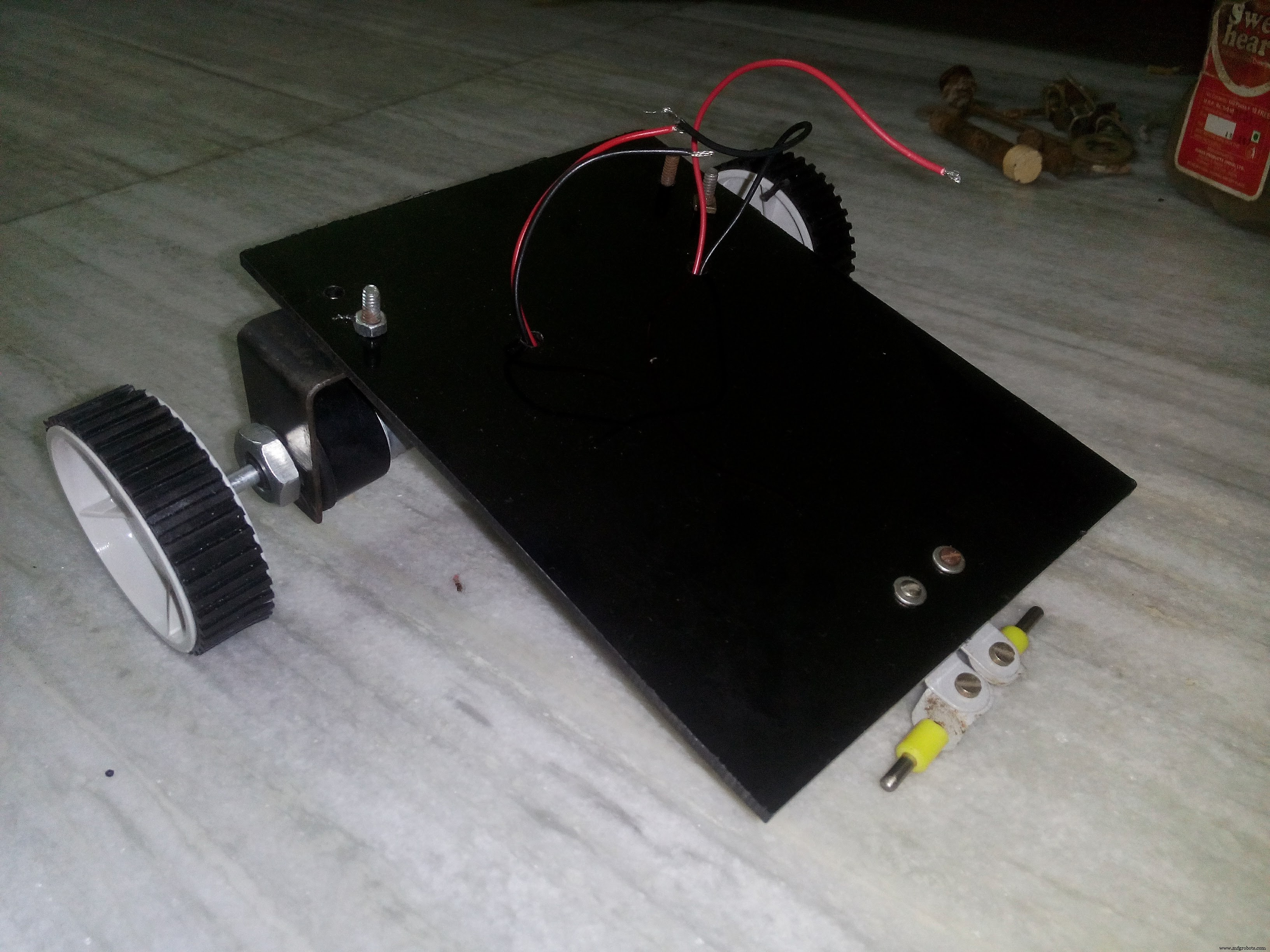
Dengan demikian struktur dasar mobil kita sudah siap. Anda dapat menggunakan desain ini atau Anda dapat mengembangkan desain Anda sendiri tetapi ingat untuk menjaga bobot serendah mungkin karena ini adalah desain dua motor.
--> Sirkuit
Sekarang mari kita bangun sirkuitnya
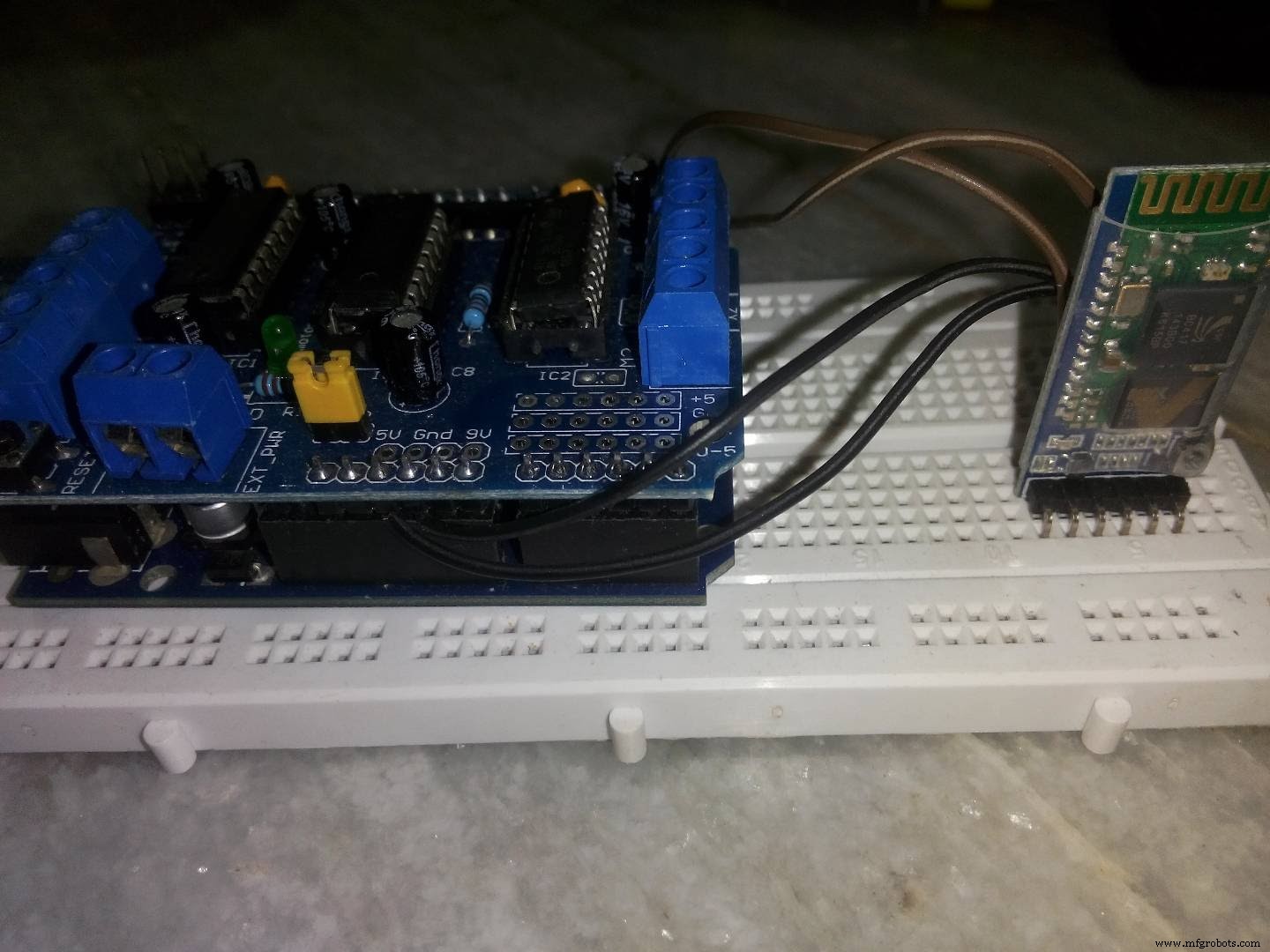
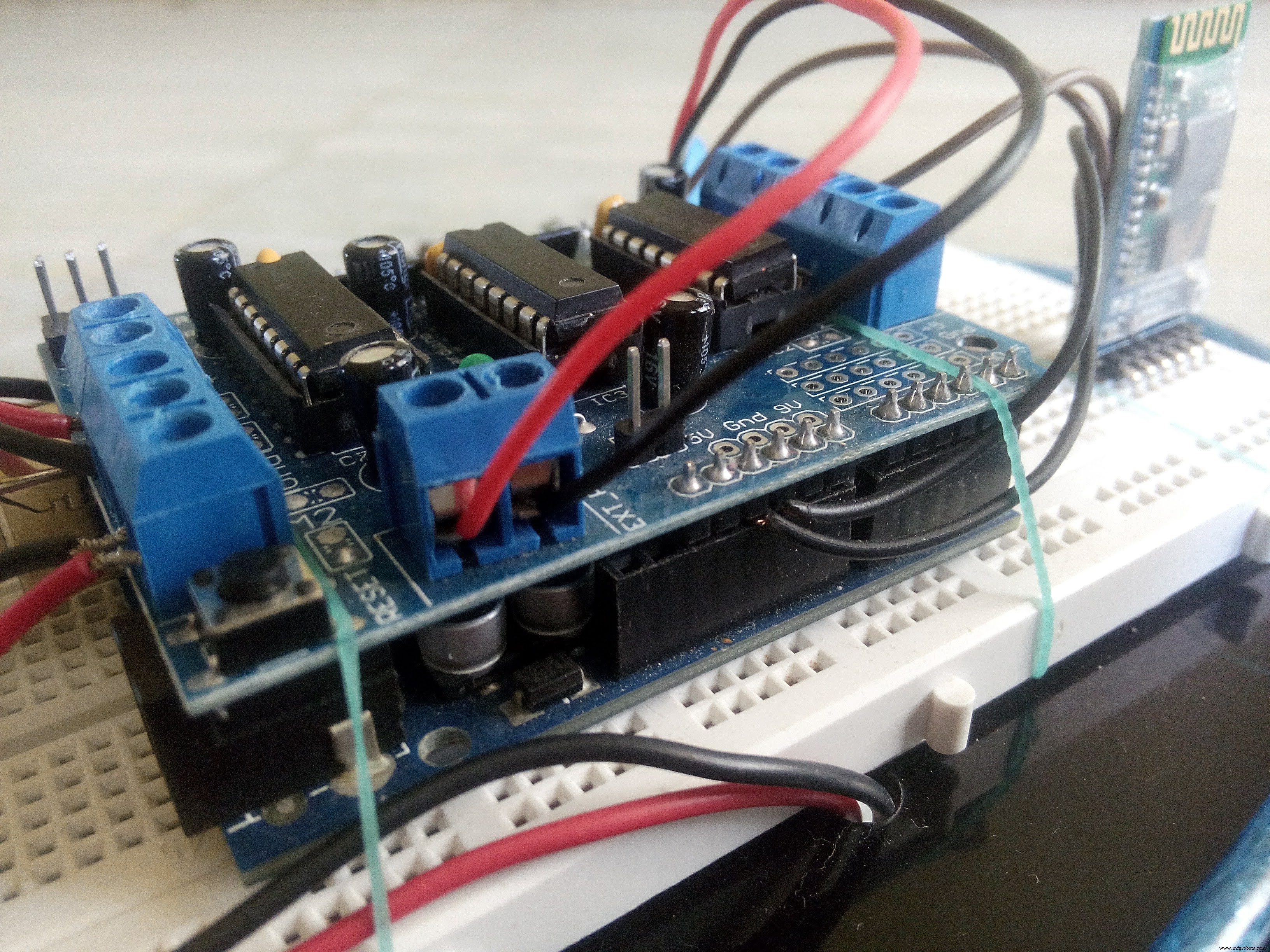
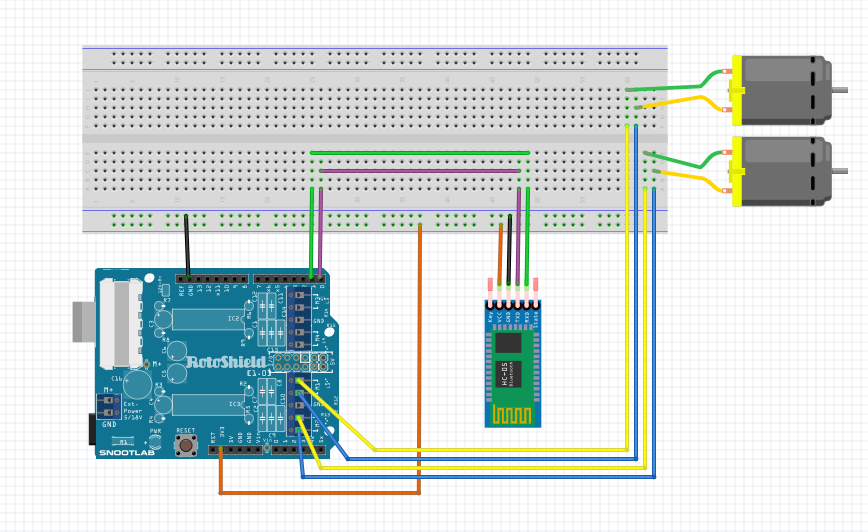
Ikuti skema untuk membuat koneksi. Beginilah tampilannya setelah semua koneksi dibuat.
--> Catu daya
Sekarang ini agak penting.
Untuk menyalakan Arduino Uno digunakan power bank dengan tegangan keluaran 5v. Ini tidak cukup untuk menggerakkan motor 12v dc itu. Jadi kita membutuhkan sumber daya tambahan.
Saya menggunakan dua baterai 9v secara seri untuk mendapatkan pasokan 18v. Masalah utama di sini adalah bahwa di sini jumlah arus yang baik juga diperlukan.
Baterai saya tidak mampu mensuplai arus yang cukup sehingga performa mobil ini tidak 100% memuaskan. Itu berfungsi tetapi motor berjalan dengan kecepatan sangat rendah.
Jadi saya sarankan untuk menggunakan baterai 12v atau Anda harus berkompromi dengan kecepatannya.
-->Kode
Di sini kita akan menggunakan arah putaran motor untuk mengontrol arah mobil.
Maju - Kedua motor bergerak ke arah depan
Mundur - Kedua motor bergerak ke arah belakang
Kiri - Motor kiri bergerak mundur dan motor kanan bergerak Maju
Kanan - Motor kiri bergerak maju dan motor kanan bergerak mundur
Berhenti - Kedua motor berhenti
void forward(){ motor1.run(FOWARD); motor2.run(FOWARD);}void mundur(){ motor1.run(Mundur); motor2.run(Mundur);}kosongkan kiri(){ motor1.run(Mundur); motor2.run(FOWARD);}batalkan kanan(){ motor1.run(FOWARD); motor2.run(Mundur);}void Stop(){ motor1.run(LEPAS); motor2.run(RELEASE);}
------------------------------------------------ ---------------------------------------
Jadi itu dia!
1. Cukup unggah kode ke Arduino.
2. Buat koneksi.
3. Luncurkan aplikasi.
4. Hubungkan ponsel Anda ke mobil.
Inilah KECANTIKAN kami yang telah selesai!

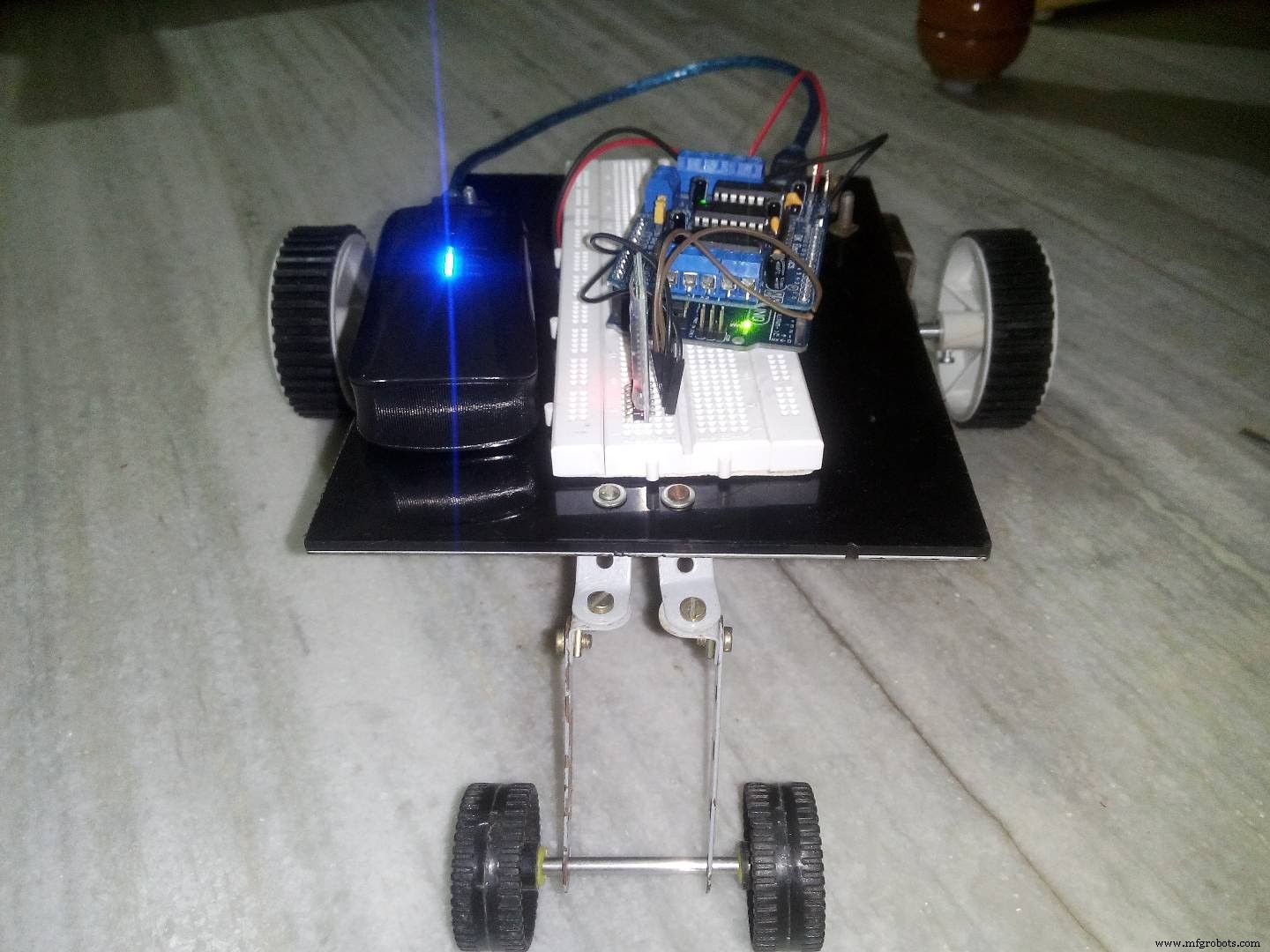
Saya harap tutorial ini cukup baik untuk membuat Anda maju. Jika Anda memiliki saran untuk beberapa perubahan atau penambahan lebih lanjut untuk proyek ini, beri tahu saya di bagian komentar.
Kode
KodeC/C++
Kode ini harus diupload di Arduino Uno#include AF_DCMotor motor1(1); //motor1 adalah motor kiriAF_DCMotor motor2(2); //motor2 adalah motorint val;void setup(){ Serial.begin(9600); motor1.setSpeed(255); //kecepatan motor diatur motor2.setSpeed(255); Stop();}void loop() { bt=Serial.read();if(val=='1') //ketika modul bluetooth menerima 1 mobil bergerak maju{ maju(); }if(val=='2') //ketika modul bluetooth menerima 2 mobil bergerak mundur{ mundur(); }if(val=='3') //ketika modul bluetooth menerima 3 mobil bergerak ke kiri{ kiri(); }if(val=='4') //ketika modul bluetooth menerima 4 mobil bergerak ke kanan{ kanan(); }if(val=='5') //ketika modul bluetooth menerima 5 mobil berhenti{ Stop(); }}void forward(){ motor1.run(FOWARD); motor2.run(FOWARD);}void mundur(){ motor1.run(Mundur); motor2.run(Mundur);}kosongkan kiri(){ motor1.run(Mundur); motor2.run(FOWARD);}batalkan kanan(){ motor1.run(FOWARD); motor2.run(Mundur);}void Stop(){ motor1.run(LEPAS); motor2.run(RELEASE);}
Skema
Ini adalah koneksi. Hubungkan sumber daya 12v ke pelindung driver motor. Harap dicatat bahwa skema tidak termasuk sumber daya eksternal.