Tentang proyek ini
Proyek lain, ide hadiah out-of-the-box lainnya! Mempersembahkan kepada Anda robot 4-roda yang dikendalikan Dabble - robot yang sederhana dan menyenangkan untuk dibuat dan mudah dikendalikan yang dapat dikontrol melalui Bluetooth menggunakan Dabble, aplikasi seluler yang dikembangkan sendiri oleh kami. Yang Anda butuhkan untuk membuat robot Anda hanyalah papan Arduino Uno, sasis, roda, poros motor, dan aksesori serta peralatan lainnya. Untuk mengontrolnya, Anda perlu menginstal Dabble dari Google Play dan memasangkannya dengan Bluetooth; dan robot Anda siap untuk pergi ke berbagai tempat!
Apa cara yang lebih baik untuk mengakhiri tahun dengan semangat DIY yang sama dengan yang dimulainya, bukan? Jadi tunggu apa lagi!
Jadi, Mari kita mulai!
Langkah 1:Hal yang Anda Butuhkan 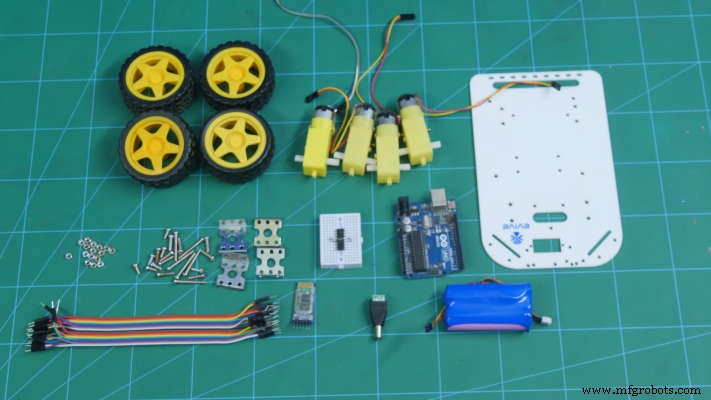
- Papan tempat memotong roti
Langkah 2:Pembuatan Badan
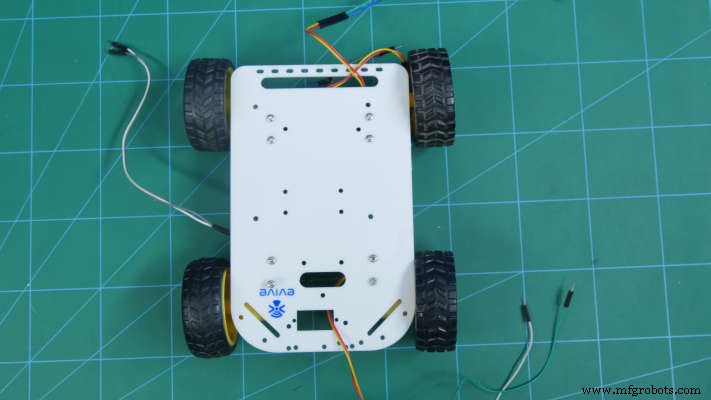
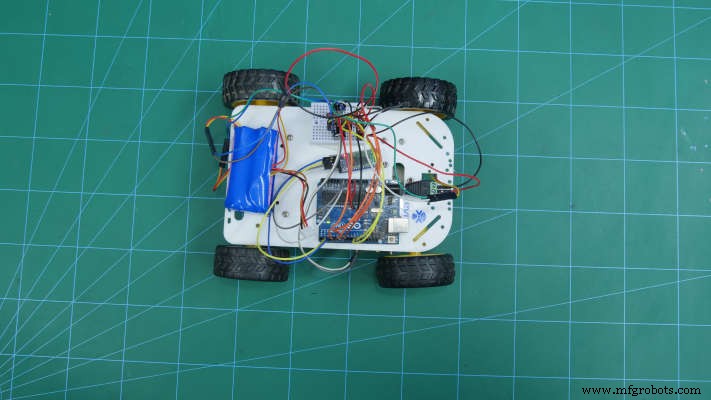
Pertama, kita akan mulai membuat body Robot 4 Roda.
Ambil sasis dan balikkan.

Pada sasis ini pasang 4 dudukan motor menggunakan Baut dan mur M3.
Pasang Motor DC dan pasang pada dudukan motor menggunakan Mur dan Baut M2.
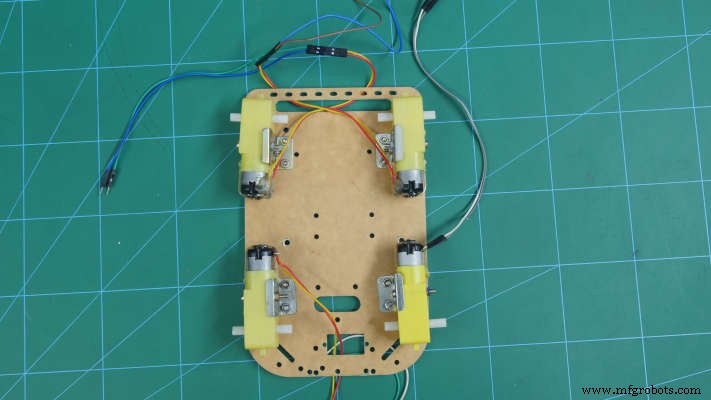
Pasang roda pada setiap poros Motor DC.

Balikkan rakitan, sehingga tubuh Anda dibuat.
Langkah 3:Menambahkan Otak
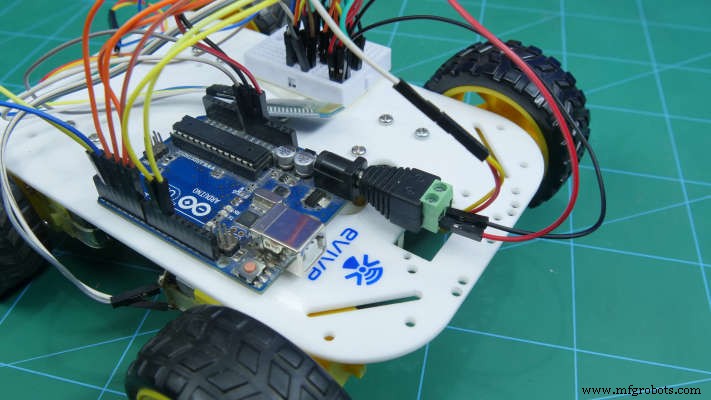
Mikrokontroler yang akan kita gunakan adalah Arduino Uno.
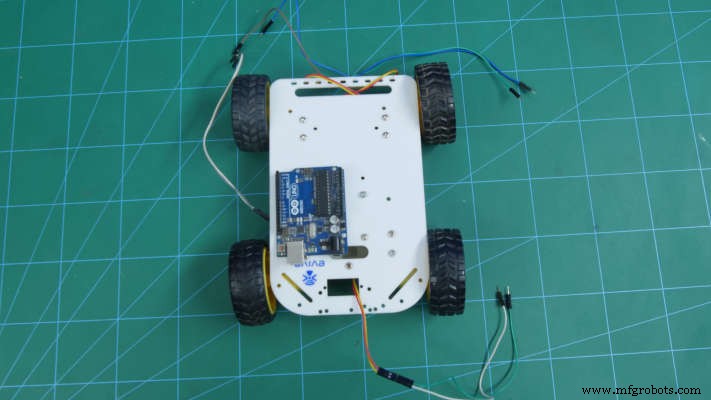

Kami akan membuat semua koneksi di atasnya, tetapi kami juga akan menggunakan papan tempat memotong roti untuk membuat koneksi.
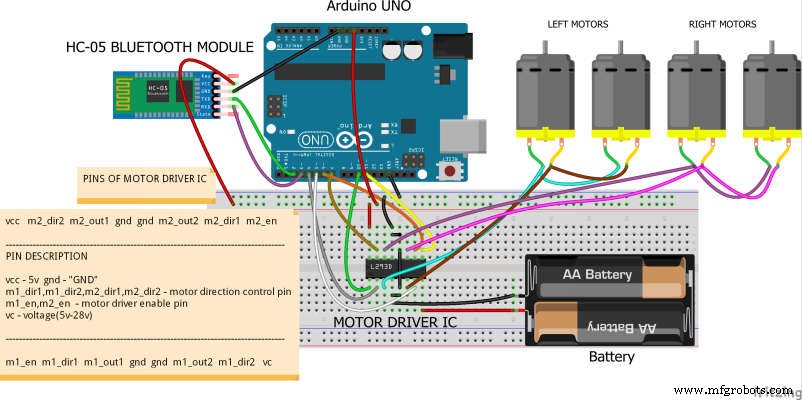
Langkah 4:Membuat Koneksi dan Menggunakan Driver Motor
Buat koneksi seperti yang ditunjukkan pada gambar di bawah ini.
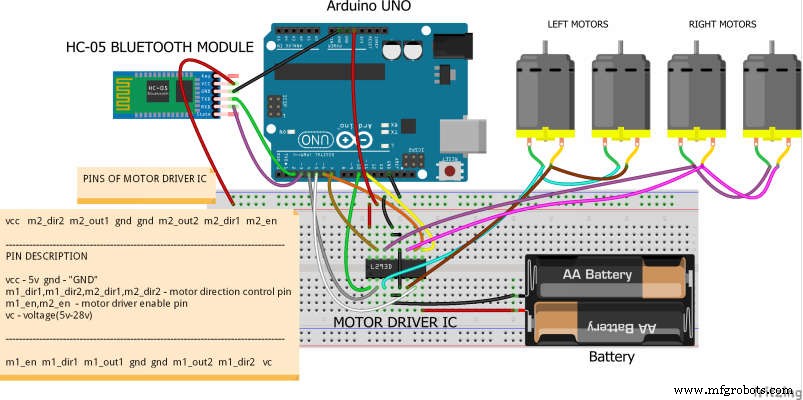
Kami akan menggunakan driver motor karena Arduino Uno tidak menyediakan daya yang cukup untuk menjalankan 4 Motor. Dengan demikian, kami akan menambahkan driver motor, kami akan dapat memberikan energi yang dibutuhkan robot.
Dua motor kiri dihubungkan secara paralel. Demikian pula, dua motor kanan terlalu terhubung secara paralel. Sambungan dibuat sebagai berikut:
- Aktifkan Pin – Pin Digital 10 dan 11
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 – Pin Digital 4, 5, 6, dan 7
- GND – GND Arduino dan BateraiPastikan kita menghubungkan semua kabel GND bersama-sama.
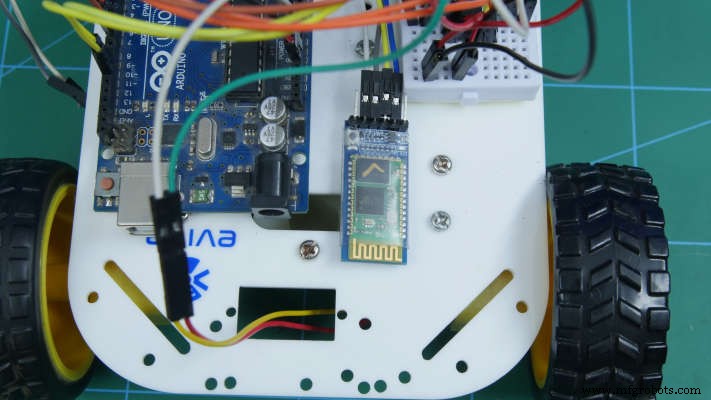
Langkah 5:Menghubungkan Ponsel Cerdas
Kami perlu menambahkan modul yang akan membuat koneksi antara robot Anda dan Aplikasi Dabble di Smartphone.
Kami mengambil Modul Bluetooth HC05. Hubungkan seperti yang ditunjukkan pada gambar koneksi.
Langkah 6:Menambahkan Baterai
Kita perlu menambahkan sumber daya ekstra ke robot kita. Juga, untuk menghubungkan Arduino Uno dengan baterai kita akan menggunakan Blok Terminal DC atau Jack DC.
Langkah 7:Kode Arduino
Unggah kode berikut:
robot.ino
Langkah 8:Bekerja
Kita dapat dengan mudah menghubungkan robot kita ke Smartphone kita menggunakan Dabble.
Sebelum bekerja dengan modul apa pun, Anda harus menghubungkan Bluetooth yang sedang Anda kerjakan.
Ada banyak modul yang tersedia di Aplikasi untuk fungsi lain.
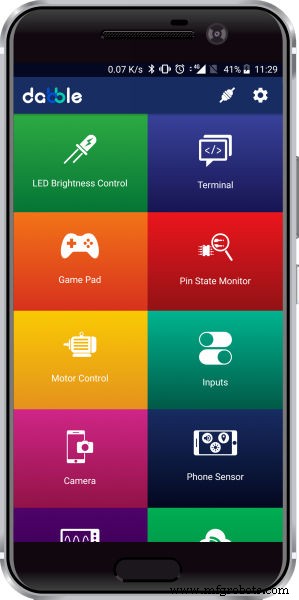
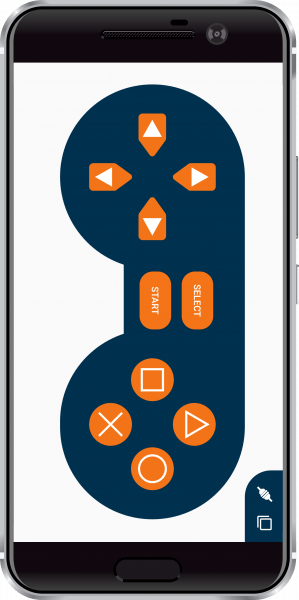
Hari ini kita akan bekerja dengan Modul Gamepad.
Dan kita akan menggunakan tombol Set Kiri:
Langkah 9:Kesimpulan
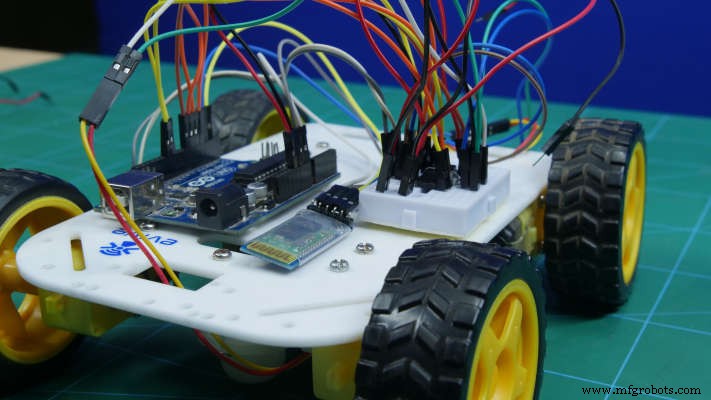
Dengan ini, robot 4 roda yang dikendalikan DIYDabble siap beraksi!
Ssst! Asal tahu saja, Dabble dapat melakukan lebih dari sekadar mengendalikan robot secara nirkabel. Anda dapat menjelajahinya lebih lanjut di sini!
Kode
- robot.ino
- Perpustakaan yang hidup
robot.inoArduino
/* * * proyek ini mendemonstrasikan pengendalian robot roda 4 arduino menggunakan aplikasi Dabble * kami akan menggunakan modul gamepad dalam mode digital * untuk informasi lebih lanjut tentang gamepad, buka https://thestempedia.com/docs/dabble/game- pad-module/ * * dalam proyek ini kita akan menggunakan modul bluetooth HC-05 * untuk arduino "UNO" menggunakan modul bluetooth buadrate di bawah 38400 * * koneksi modul bluetooth dengan arduino * * modul bluetooth HC-05 ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Ditulis oleh Punit chotaliya, STEMpedia * pada 16 jan 2019 * *///Untuk memasukkan modul GamePad ke dalam program Arduino, Anda harus //menyertakan header berikut:#define CUSTOM_SETTINGS#define INCLUDE_GAMEPAD_MODULE//sertakan pustaka aplikasi Dabble #include #define motor1_en 10 // motor 1 aktifkan pin #define motor2_en 11 // motor 2 aktifkan pin # define motor1_dir1 4 // motor 1 input1 (InputA) #define motor1_dir2 5 // motor 1 input2 (InputA)#define motor2_dir1 6 // motor 2 input1 (InputB)#define mo tor2_dir2 7 // motor 2 input2 (InputB)void setup() { // letakkan kode setup Anda di sini, untuk dijalankan sekali:Serial.begin(9600); // memulai komunikasi serial menggunakan 9600 baudrate Dabble.begin(38400); // Masukkan baudrate modul bluetooth Anda // CATATAN :untuk arduino "UNO" gunakan modul bluetooth buadrate di bawah 38400 for(unsigned int i=4;i<8;i++) { pinMode(i,OUTPUT); // mendeklarasikan pin input motor1 dan motor2 sebagai pin output } pinMode(motor1_en,OUTPUT); // mendeklarasikan mengaktifkan pin motor sebagai output pinMode(motor2_en,OUTPUT); }void loop() { // letakkan kode utama Anda di sini, untuk dijalankan berulang kali:Dabble.processInput(); //Untuk me-refresh data yang diperoleh arduino UNO dari aplikasi mobile, Anda harus menggunakan baris kode berikut if (GamePad.isUpPressed()) // jika UP ditekan di gamepad maka gerakkan robot ke depan { Serial.print ("KE ATAS"); maju(); } else if (GamePad.isDownPressed()) // jika DOWN ditekan di gamepad maka gerakkan robot ke belakang { Serial.print("DOWN"); ke belakang(); } else if (GamePad.isLeftPressed()) // jika LEFT ditekan di gamepad maka pindahkan robot ke KIRI { Serial.print("Left"); kiri(); } else if (GamePad.isRightPressed()) // jika RIGHT ditekan di gamepad maka gerakkan robot RIGHT { Serial.print("Right"); Baik(); } else // hentikan robot { Serial.println("strop"); Berhenti(); } } void forward() // fungsi untuk gerakan maju robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,TINGGI); digitalWrite(motor1_dir2,RENDAH); digitalWrite(motor2_dir1,TINGGI); digitalWrite(motor2_dir2,RENDAH); } void backward() // fungsi untuk gerakan mundur robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,TINGGI); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,TINGGI); } void left() // fungsi untuk gerakan kiri robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,TINGGI); digitalWrite(motor2_dir1,TINGGI); digitalWrite(motor2_dir2,RENDAH); } void kanan() // fungsi untuk gerakan kanan robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,TINGGI); digitalWrite(motor1_dir2,RENDAH); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,TINGGI); } void Stop() // // fungsi tanpa gerakan { analogWrite(motor1_en,0); analogWrite(motor2_en,0); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,RENDAH); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,RENDAH); }
Liveve LibraryC/C++
Tidak ada pratinjau (hanya unduhan).
Skema