Tentang proyek ini
Mari kita membuat robot yang sepenuhnya otonom menggunakan sensor Arduino dan IR. Itu bisa mengikuti garis hitam di permukaan putih. Tonton video selengkapnya!
Komponen yang digunakan: - Sepotong karton/ Lembaran akrilik
- Arduino Uno
- Sensor inframerah
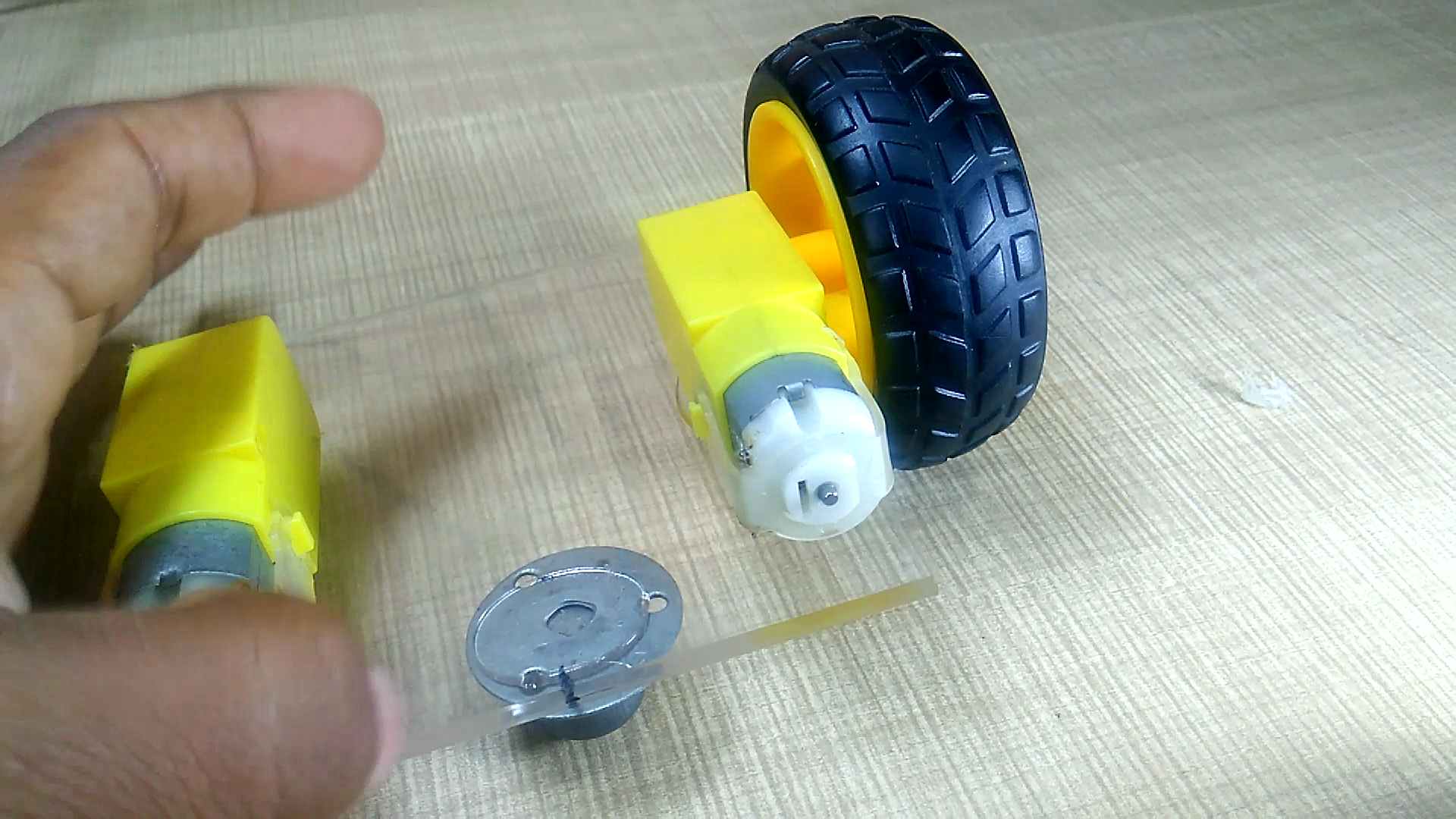
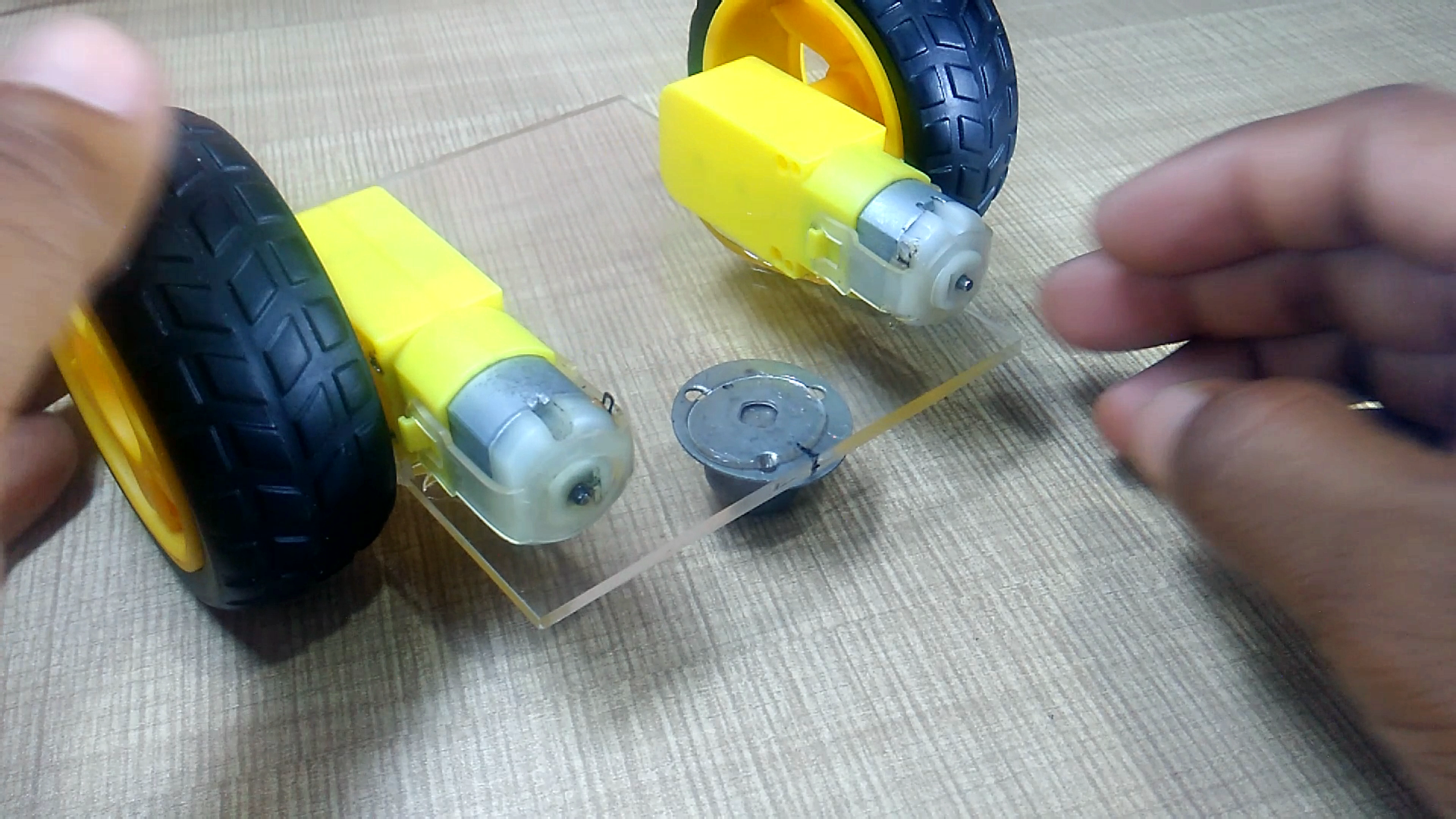
- Motor BO
- Roda
- Roda roda
- IC L293d
- PCB
- Kabel fleksibel
- Baterai
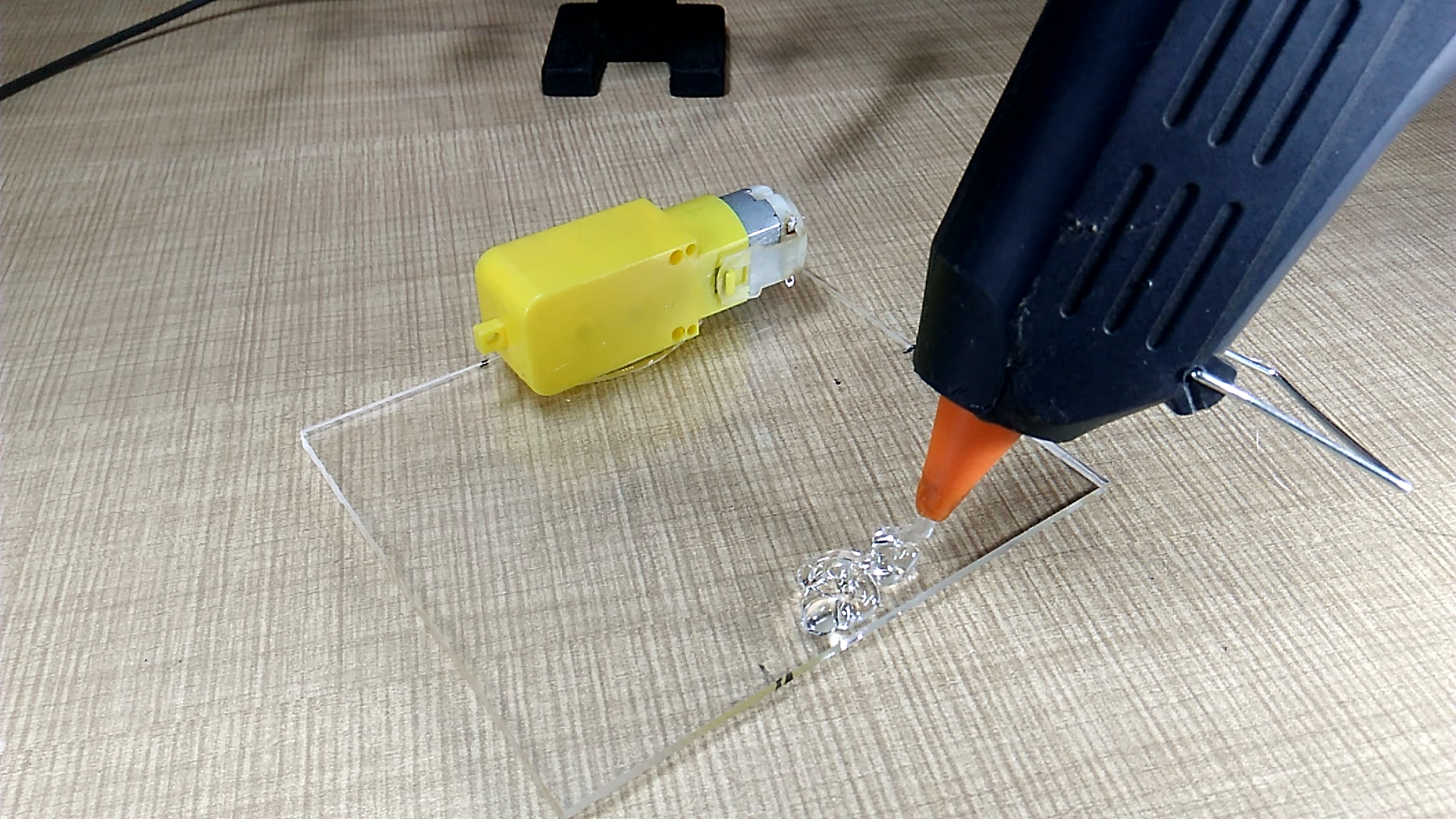
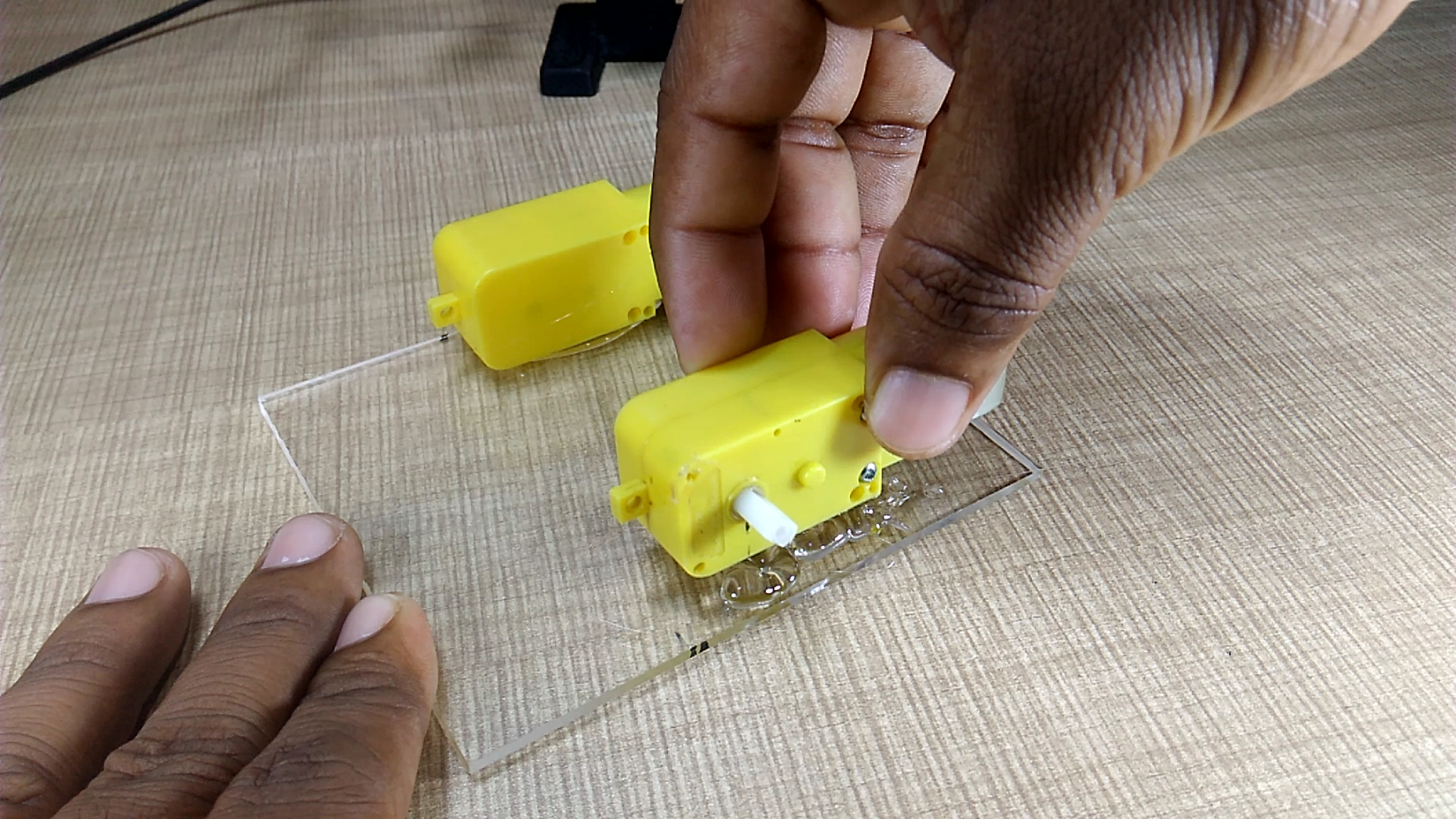
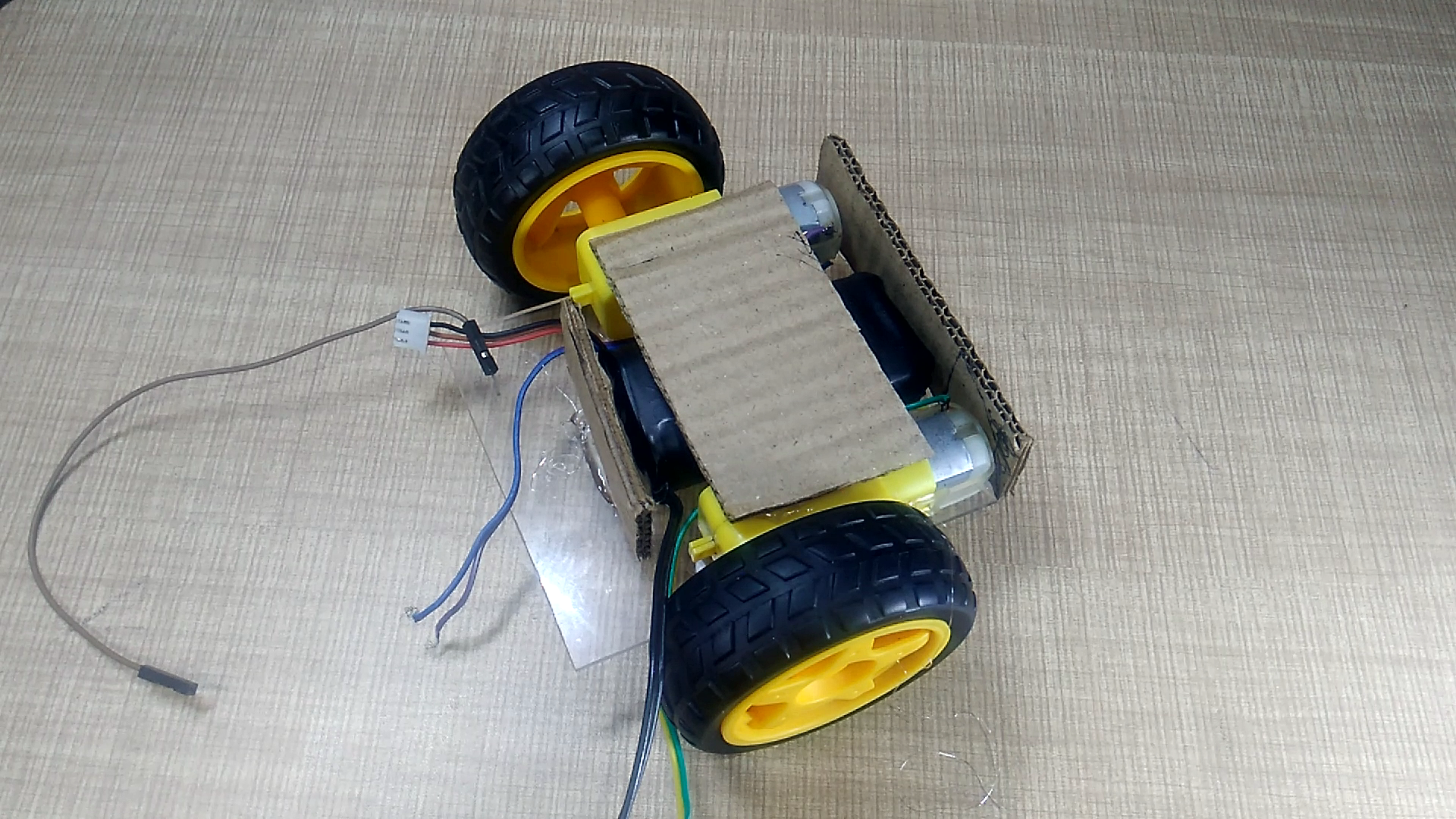
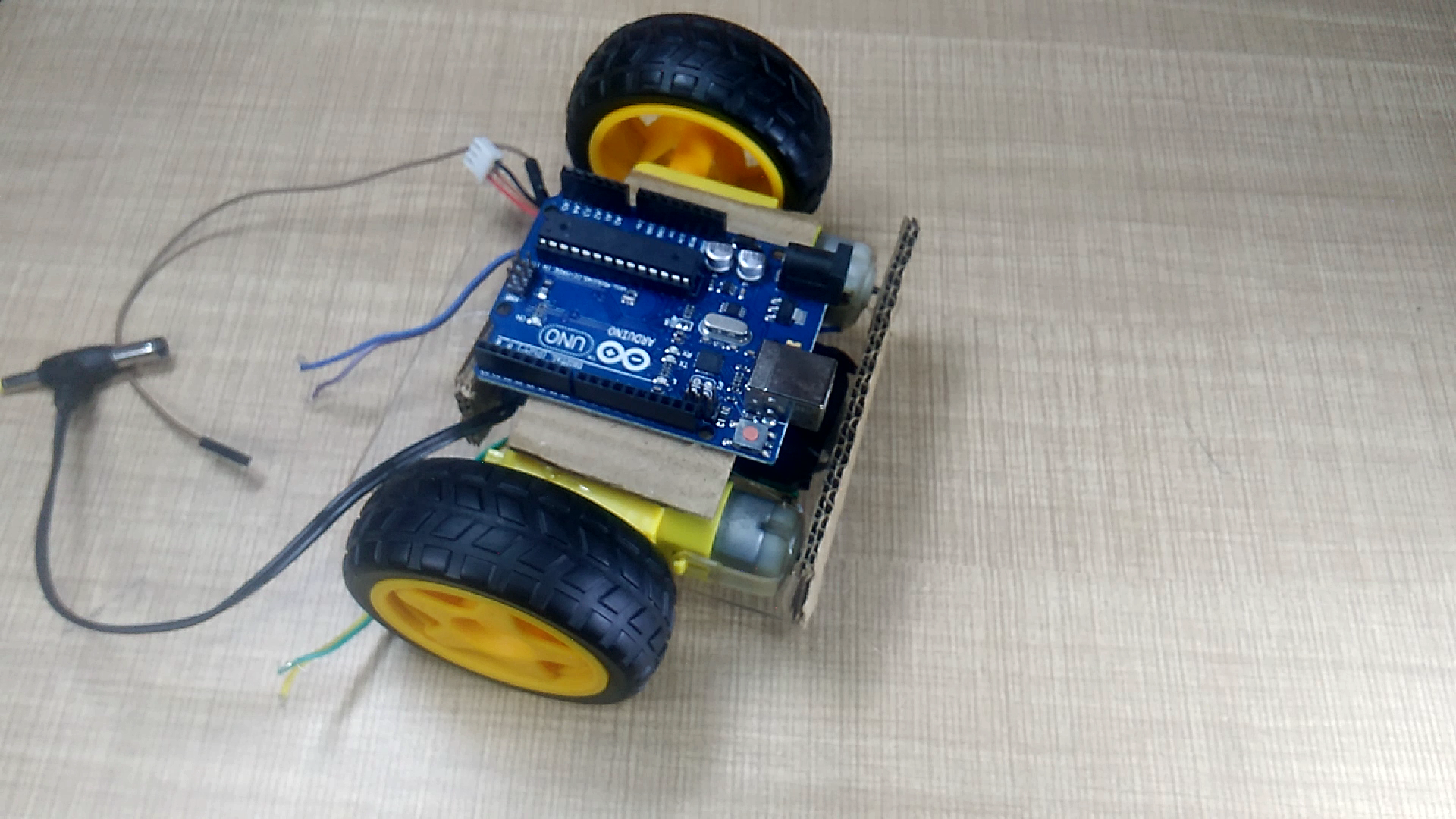
Perbaiki semua komponen pada lembaran akrilik dan buat sasis seperti yang ditunjukkan pada gambar.



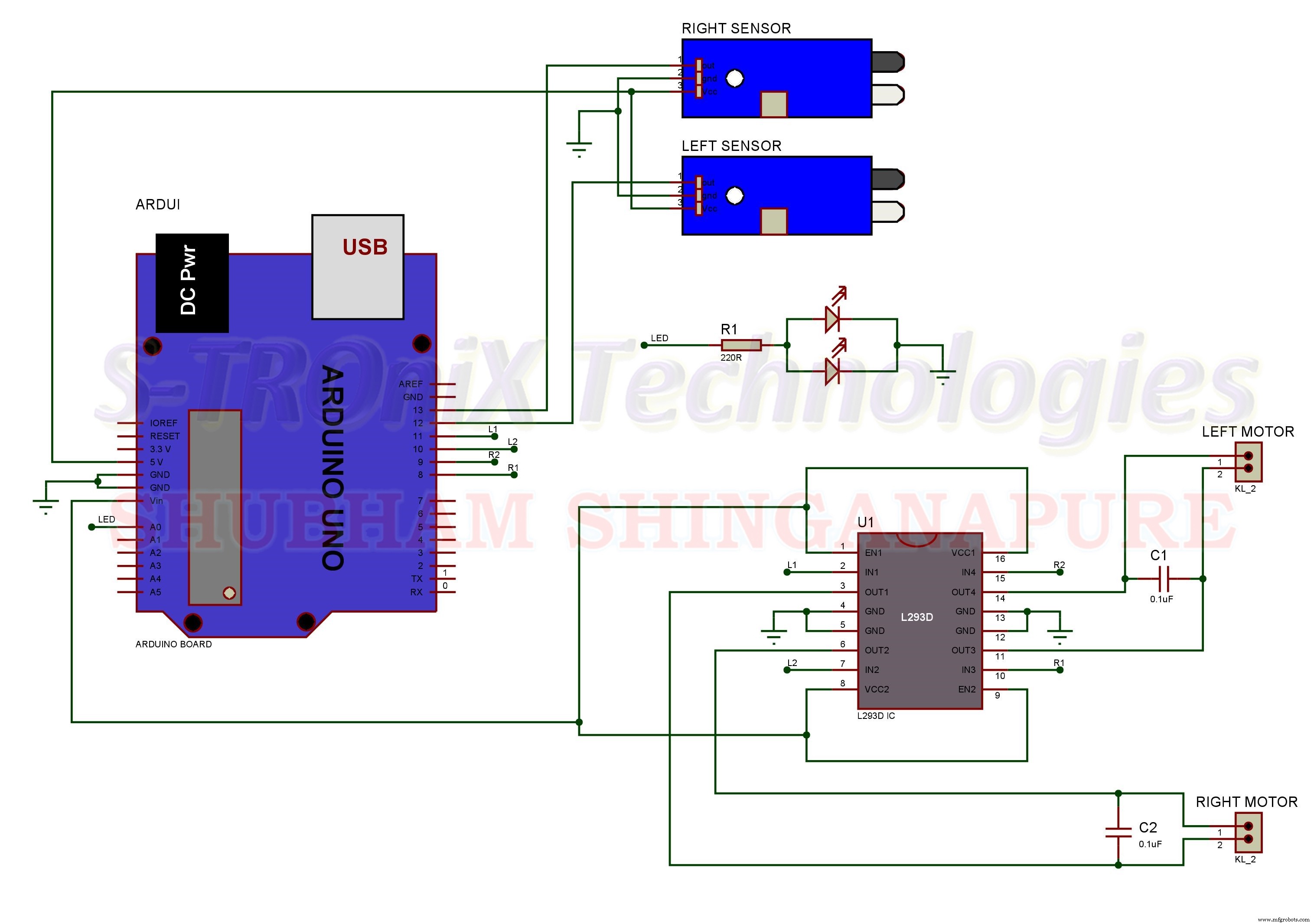
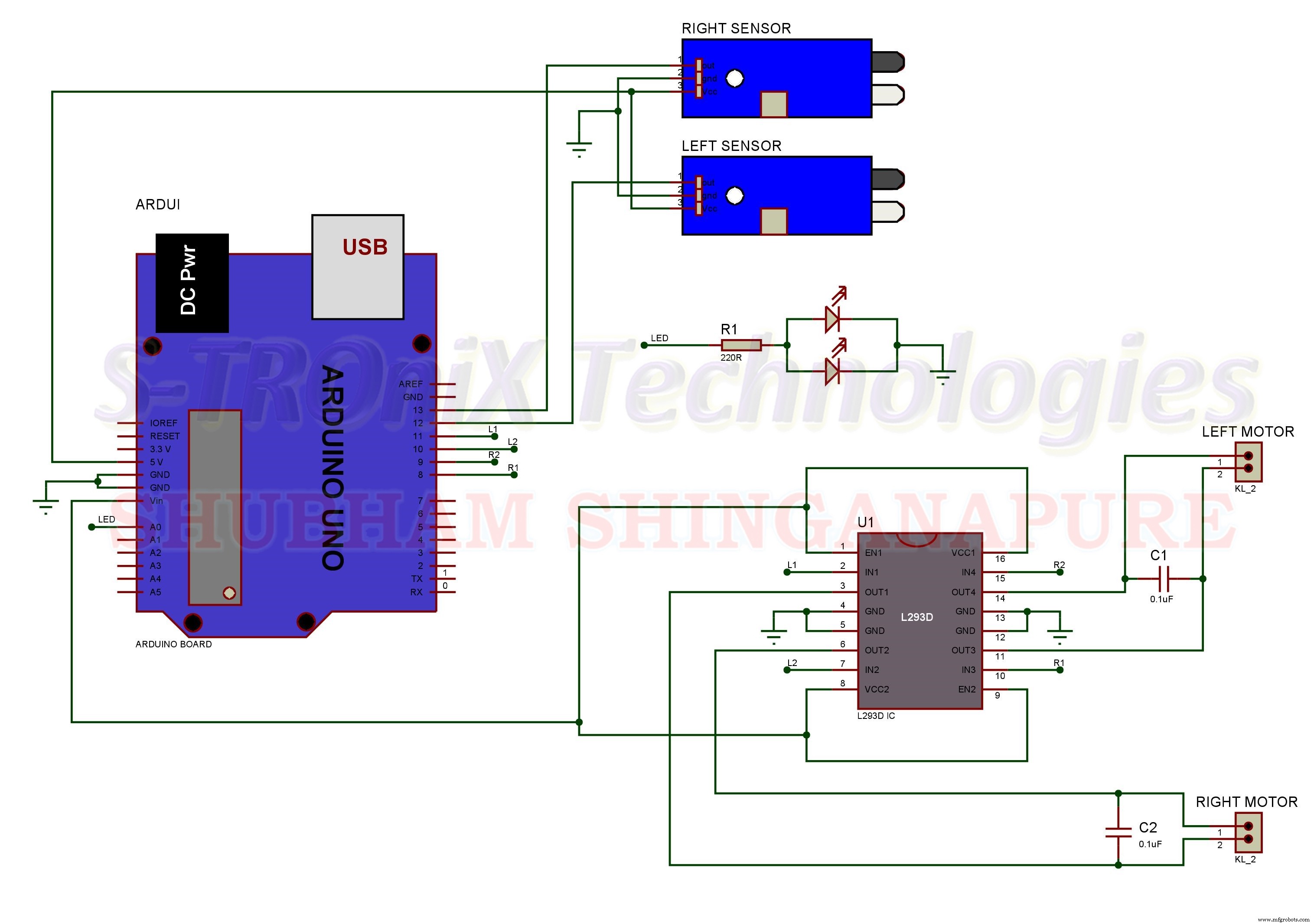
Sekarang buat semua koneksi Sesuai Diagram sirkuit di bawah ini.
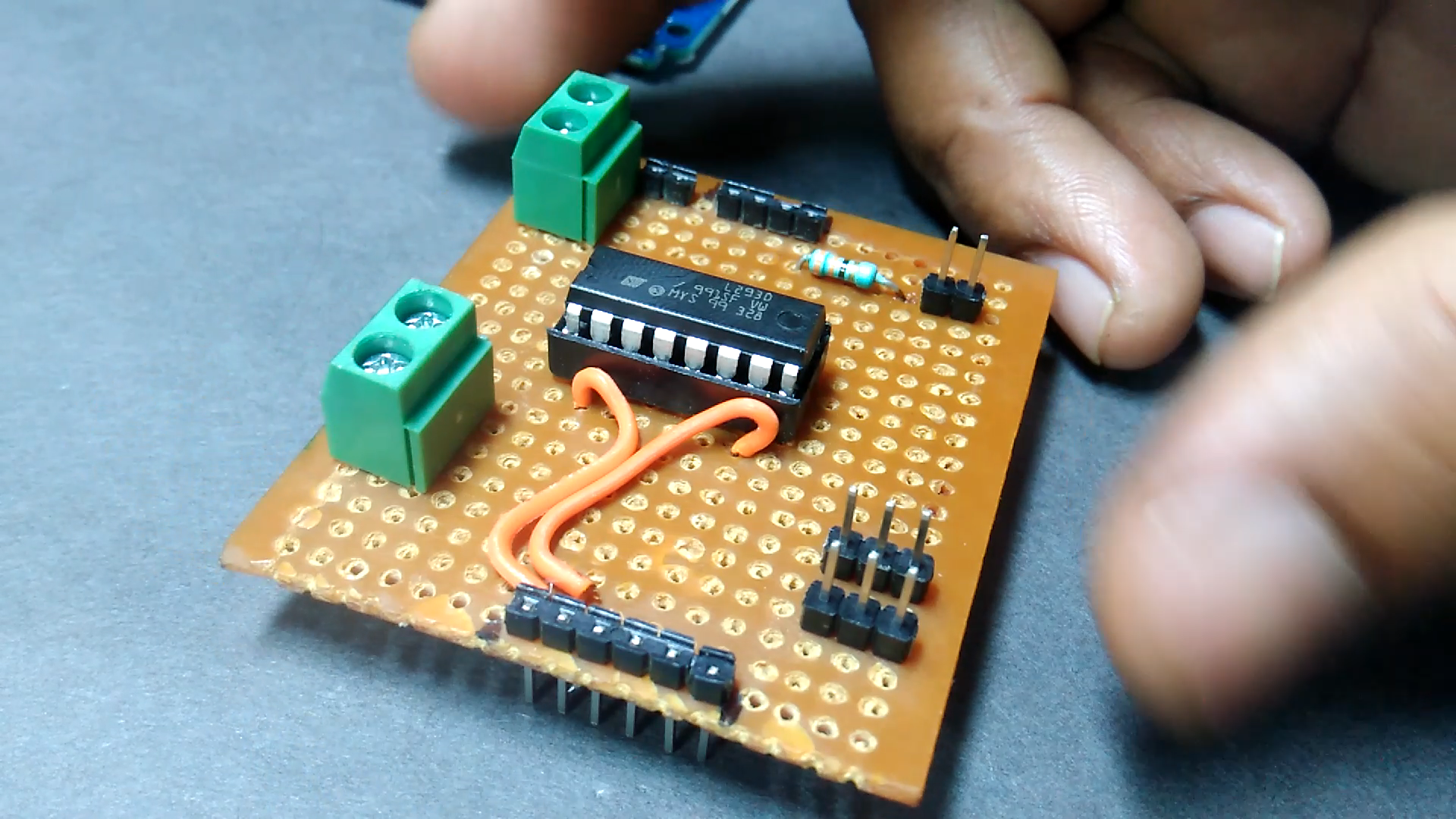
Anda dapat membuat sirkuit ini pada PCB bertitik seperti ini.
atau dapat menggunakan jenis PCB yang terlihat profesional ini.
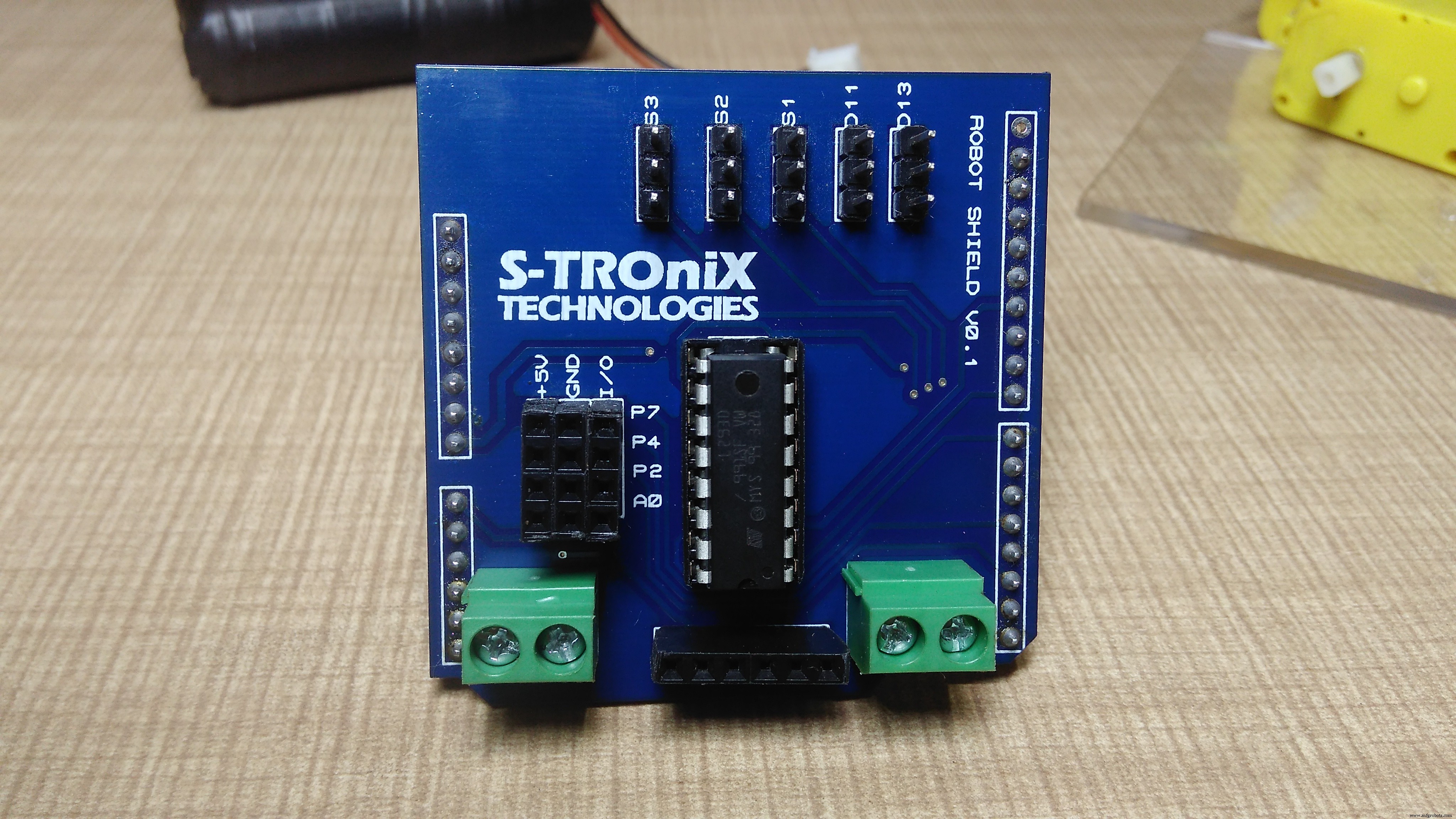
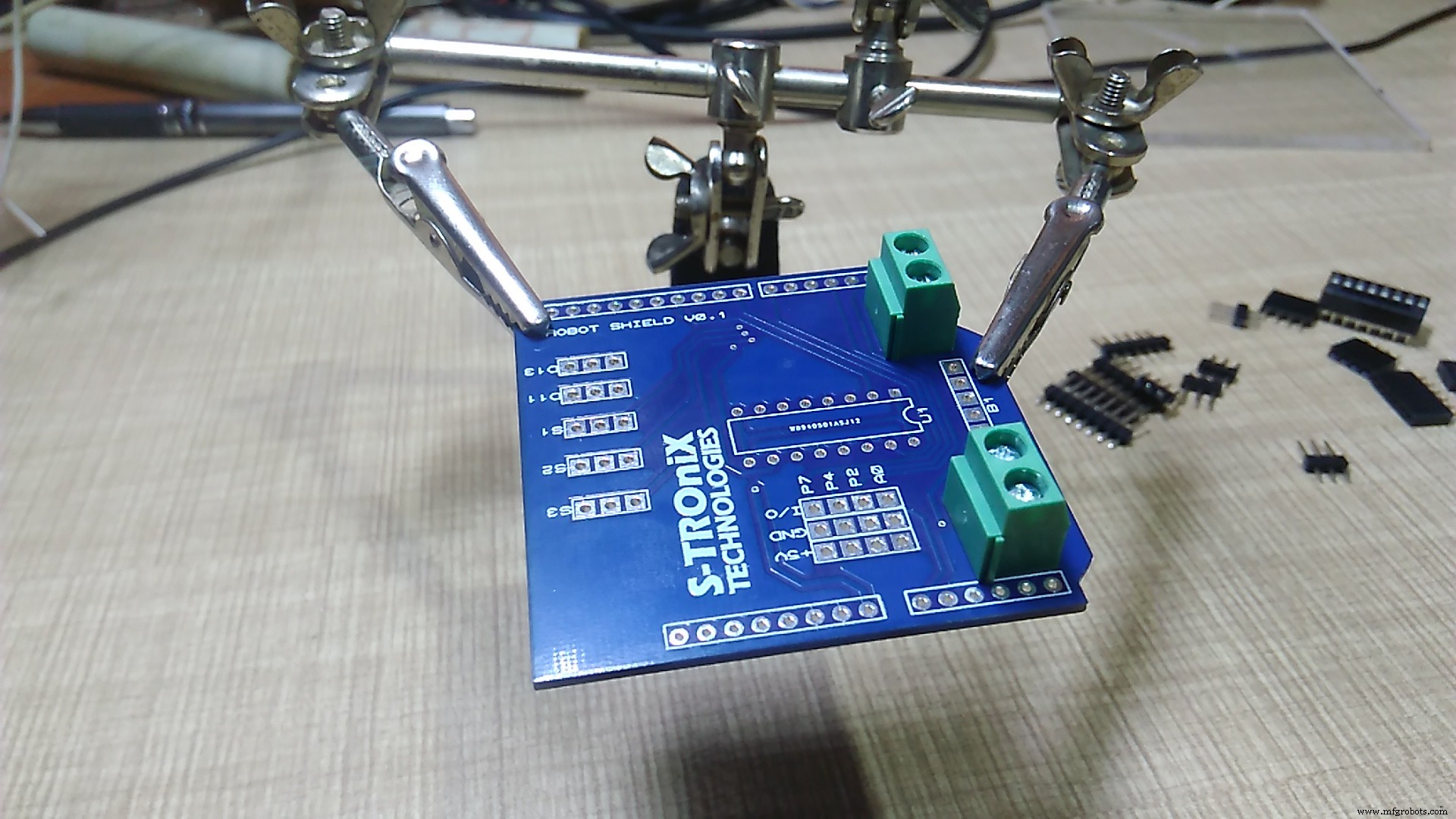
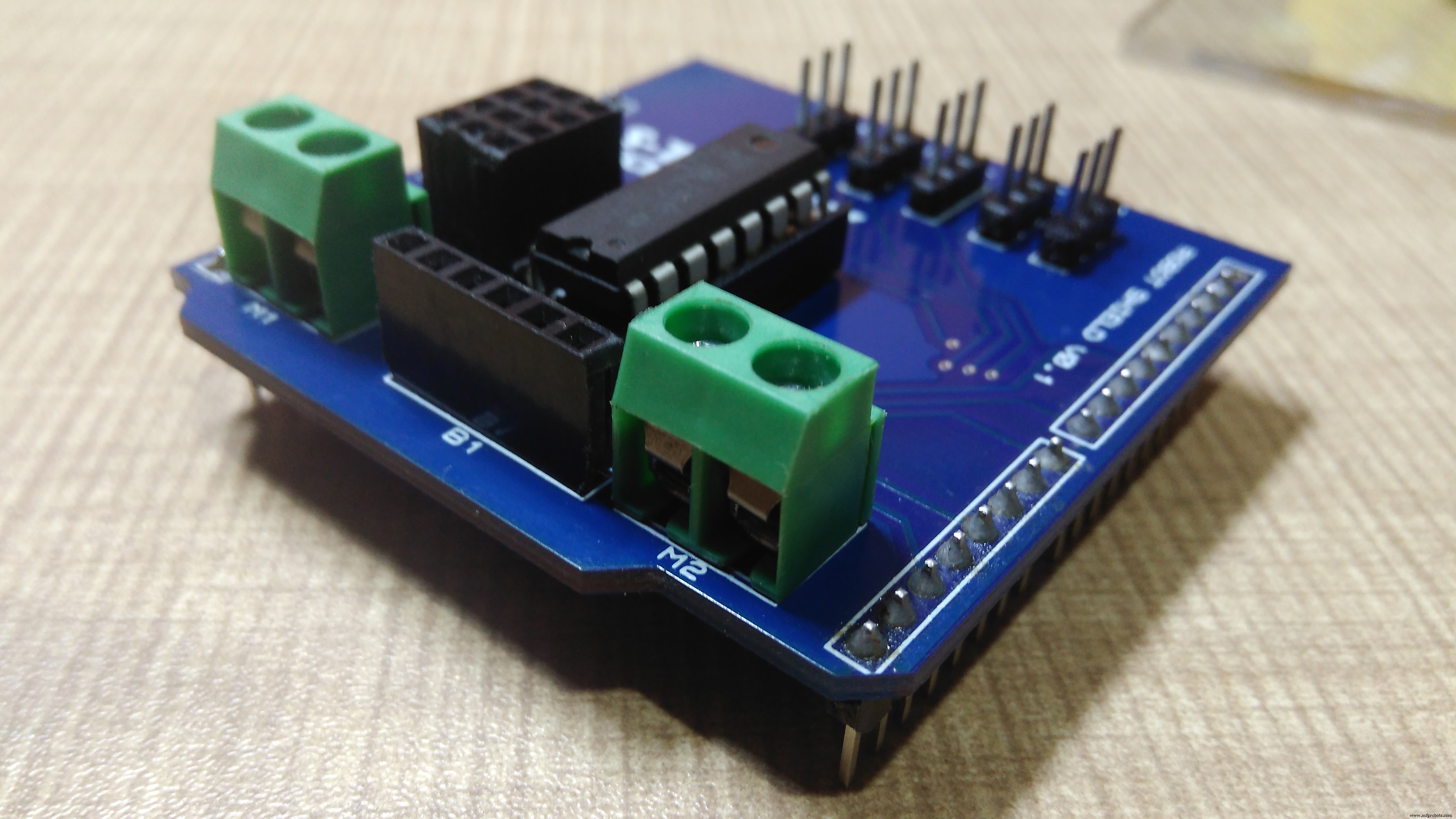
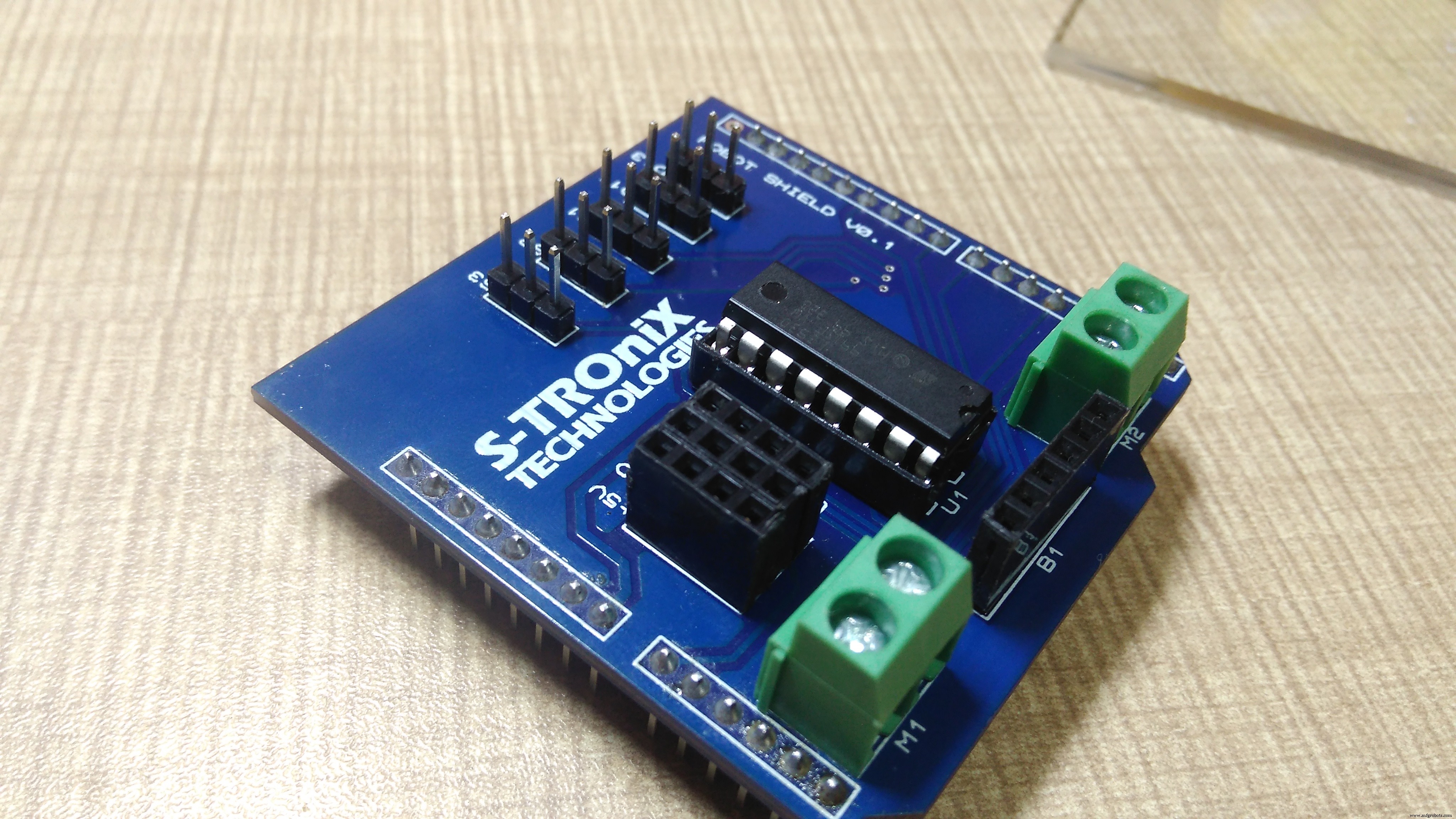
Anda dapat memesan PCB untuk Perisai ini dari sini https://www.pcbway.com/project/shareproject/How_to_Make_Arduino_Based_Edge_Avoiding_Robot.html
atau untuk perisai siap pakai hubungi kami di:https://www.facebook.com/STRoniXTechnologies
Sekarang saatnya memprogram robot ini. unggah program ini ke arduino dan semuanya selesai.
//program oleh Shubham Shinganapure pada 05-08-2019
//
//untuk Robot Line following menggunakan sensor 2IR
int lm1=8; //output motor kiri 1
int lm2=9; //output motor kiri 2
int rm1=10; //output motor kanan 1
int rm2=11; //output motor kanan 2
int sl=13; //sensor 1 masukan (kiri)
int sr=12; //sensor 2 masukan (kanan)
int SlV=0;
int SrV=0;
int led=A0;
pengaturan kosong()
{
pinMode(lm1,OUTPUT);
pinMode(lm2,OUTPUT);
pinMode(rm1,OUTPUT);
pinMode(rm2,OUTPUT);
pinMode(led, OUTPUT);
pinMode(sl,INPUT);
pinMode(sr,INPUT);
sTOP();
}
void loop()
{
SlV=digitalRead(sl);
SrV=digitalRead(sr);
if(SrV==LOW &&SlV==LOW)
{
ForWard( );
}
if(SrV==HIGH &&SlV==LOW)
{
Left();
}
if(SrV==RENDAH &&SlV==TINGGI)
{
Kanan();
}
if(SrV==TINGGI &&SlV==TINGGI)
{
sTOP();
}
}
void ForWard()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void BackWard()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void Left()
{
digitalWrit e(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void Kanan()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH );
}
void sTOP()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,LOW);
digitalWrite(rm1, RENDAH);
digitalWrite(rm2,RENDAH);
}
Untuk lebih banyak berlangganan saluran youtube saya:
Kode
robot pengikut garisArduino
//program oleh Shubham Shinganapure pada 08-05-2019////untuk Robot Pengikut Garis menggunakan sensor 2IR int lm1=8; //output motor kiri 1int lm2=9; //output motor kiri 2int rm1=10; //output motor kanan 1int rm2=11; //output motor kanan 2int sl=13; //sensor 1 masukan (kiri)int sr=12; //sensor 2 masukan (kanan)int SlV=0;int SrV=0;int led=A0;pengaturan batal(){ pinMode(lm1,OUTPUT); pinMode(lm2,OUTPUT); pinMode(rm1, OUTPUT); pinMode(rm2,OUTPUT); pinMode (dipimpin, OUTPUT); pinMode(sl,INPUT); pinMode(sr,INPUT);sTOP();}void loop(){ SlV=digitalRead(sl); SrV=digitalRead(sr); if(SrV==RENDAH &&SlV==RENDAH) { Teruskan(); } if(SrV==HIGH &&SlV==LOW) { Left(); } if(SrV==LOW &&SlV==HIGH) { Kanan(); } if(SrV==HIGH &&SlV==HIGH) { sTOP(); }}void ForWard() { digitalWrite(lm1,HIGH); digitalWrite(lm2,RENDAH); digitalWrite(rm1,TINGGI); digitalWrite(rm2,RENDAH); } void BackWard() { digitalWrite(lm1,LOW); digitalWrite(lm2,TINGGI); digitalWrite(rm1,RENDAH); digitalWrite(rm2,TINGGI); } void Kiri() { digitalWrite(lm1,LOW); digitalWrite(lm2,TINGGI); digitalWrite(rm1,TINGGI); digitalWrite(rm2,RENDAH); } void Kanan() { digitalWrite(lm1,HIGH); digitalWrite(lm2,RENDAH); digitalWrite(rm1,RENDAH); digitalWrite(rm2,TINGGI); } void sTOP() { digitalWrite(lm1,LOW); digitalWrite(lm2,RENDAH); digitalWrite(rm1,RENDAH); digitalWrite(rm2,RENDAH); } Skema