
Langkah 1.
Buildrobotcar menggunakan platform yang tersedia yang dibangun di atas sirkuit roda dua. Diagram koneksi komponen elektronik ditunjukkan pada gambar di bawah ini. Anda memerlukan Arduino UNO atau papan yang sesuai, modul Bluetooth HC-05(06), driver motor, dan baterai catu daya. Motor roda gigi ditempatkan pada platform dan memaksa untuk menggerakkan roda robot. 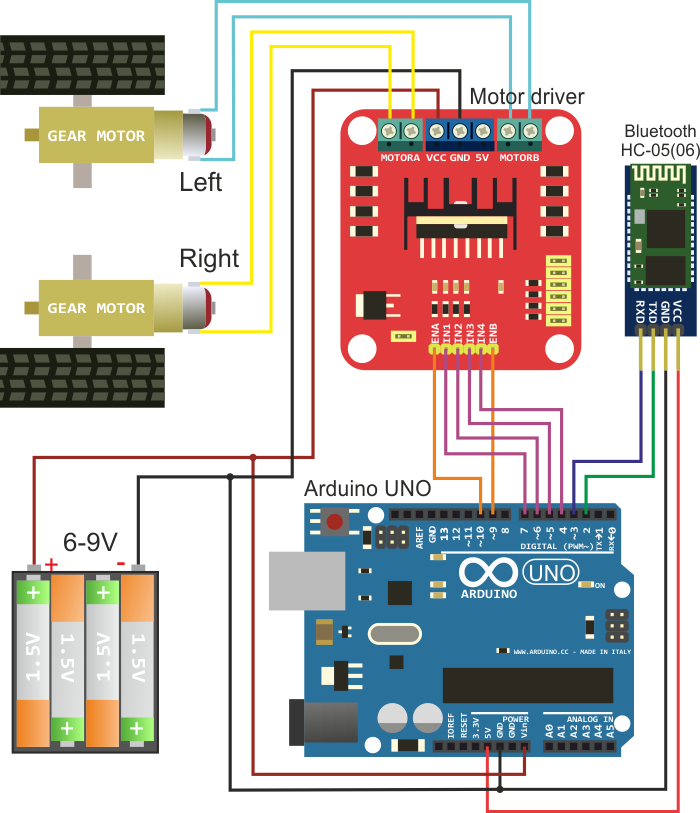
Langkah 2.
Buka situs web layanan RemoteXY di http://remotexy.com/en/editor/ dan buat antarmuka pengguna grafis untuk mengontrol robot. Atur fitur kontrol menggunakan G-sensor untuk joystick. Contoh antarmuka ada pada gambar di bawah ini. Klik tombol "Dapatkan kode sumber". 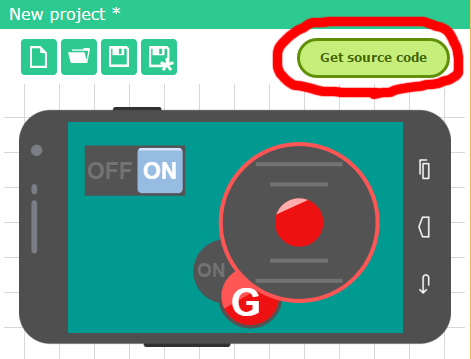
Langkah 3.
Unduh kode sumber GUI dan buka di Arduino IDE. Untuk kompilasi, Anda memerlukan perpustakaan RemoteXY.h; perpustakaan dapat diunduh dari tautan http://remotexy.com/en/library/ . Anda sudah dapat mencoba memuat kode di Arduino dan terhubung dengan aplikasi seluler. Tetapi sementara ini hanya kode yang kosong, maka Anda perlu menambahkan fungsionalitas yang diperlukan yang menghubungkan antarmuka grafis dan driver motor.
Langkah 4.
Kemudian Anda perlu menambahkan fungsionalitas kontrol robot ke kode sumber menggunakan antarmuka grafis. Untuk tujuan ini, bidang RemoteXY structure.RemoteXY structure menampilkan semua kontrol GUI Anda.
Kode sumber yang dihasilkan ditunjukkan di bawah ini. Anda dapat mengompilasinya dan mengunggahnya ke Arduino.
Langkah 5.
Instal aplikasi seluler RemoteXY di http://remotexy.com/en/download/ . Saat aplikasi berjalan di perangkat seluler, tekan koneksi tombol Bluetooth dalam daftar, pilih nama modul Bluetooth Anda, untuk modul HC-05 (06) biasanya namanya adalah INVOR atauHC-06.
Ini berhasil!
Kode - Mobil robot kendali jarak jauh melalui aplikasi seluler RemoteXY
Mobil robot kendali jarak jauh melalui aplikasi seluler RemoteXYC/C++ Anda dapat mengunduh perpustakaan RemoteXY.h dengan tautan http://remotexy.com/en/library///////////////////////// //////////////////// // RemoteXY termasuk perpustakaan /////////////////////// ////////////////////// /* RemoteXY pilih mode koneksi dan sertakan library */ #define REMOTEXY_MODE__SOFTWARESERIAL #include #include /* Setting koneksi RemoteXY */ #define REMOTEXY_SERIAL_RX 2 #define REMOTEXY_SERIAL_TX 3 #define REMOTEXY_SERIAL_SPEED 9600 /* Konfigurasi remoteXY */ unsigned char RemoteXY_CONF[] ={ 3,0,23,0,1,5,5,15,41, 11 ,43,43,1,2,0,6,5,27,11,5 ,79,78,0,79,70,70,0 }; /* struktur ini mendefinisikan semua variabel antarmuka kontrol Anda */ struct { /* variabel input */ char joystick_1_x yang ditandatangani; /* =-100..100 posisi joystick koordinat x */ joystick bertanda char_1_y; /* =-100..100 posisi joystick koordinat y */ sakelar char unsigned_1; /* =1 jika ON dan =0 jika OFF */ /* variabel lain */ unsigned char connect_flag; /* =1 jika kabel terhubung, else =0 */ } RemoteXY; /////////////////////////////////////////// // END RemoteXY termasuk ////////////////////////////////////////////////////////////// /* didefinisikan pin kontrol motor kanan */ #define PIN_MOTOR_RIGHT_UP 7 #define PIN_MOTOR_RIGHT_DN 6 #define PIN_MOTOR_RIGHT_SPEED 10 /* mendefinisikan pin kontrol motor kiri */ #define PIN_MOTOR_LEFT_UP 5 #define PIN_MOTOR_LEFT_DN 4 #define PIN_LEFT LED define PIN_LED 13 /* mendefinisikan dua larik dengan daftar pin untuk setiap motor */ unsigned char RightMotor[3] ={PIN_MOTOR_RIGHT_UP, PIN_MOTOR_RIGHT_DN, PIN_MOTOR_RIGHT_SPEED}; unsigned char LeftMotor[3] ={PIN_MOTOR_LEFT_UP, PIN_MOTOR_LEFT_DN, PIN_MOTOR_LEFT_SPEED}; /* kontrol kecepatan motor motor - penunjuk ke array pin v - kecepatan motor dapat diatur dari -100 hingga 100 */ void Roda (motor unsigned char *, int v) { if (v>100) v=100; jika (v<-100) v=-100; if (v>0) { digitalWrite(motor[0], TINGGI); digitalWrite(motor[1], RENDAH); analogWrite(motor[2], v*2.55); } else if (v<0) { digitalWrite(motor[0], RENDAH); digitalWrite(motor[1], TINGGI); analogWrite(motor[2], (-v)*2,55); } else { digitalWrite(motor[0], RENDAH); digitalWrite(motor[1], RENDAH); analogWrite(motor[2], 0); } } void setup() { /* inisialisasi pin */ pinMode (PIN_MOTOR_RIGHT_UP, OUTPUT); pinMode (PIN_MOTOR_RIGHT_DN, OUTPUT); pinMode (PIN_MOTOR_LEFT_UP, OUTPUT); pinMode (PIN_MOTOR_LEFT_DN, OUTPUT); pinMode (PIN_LED, OUTPUT); /* modul inisialisasi RemoteXY */ RemoteXY_Init(); } void loop() { /* modul event handler RemoteXY */ RemoteXY_Handler(); /* mengatur pin LED */ digitalWrite (PIN_LED, (RemoteXY.switch_1==0)?LOW:HIGH); /* mengatur motor kanan */ Roda (RightMotor, RemoteXY.joystick_1_y - RemoteXY.joystick_1_x); /* mengatur motor kiri */ Roda (LeftMotor, RemoteXY.joystick_1_y + RemoteXY.joystick_1_x); } Skema 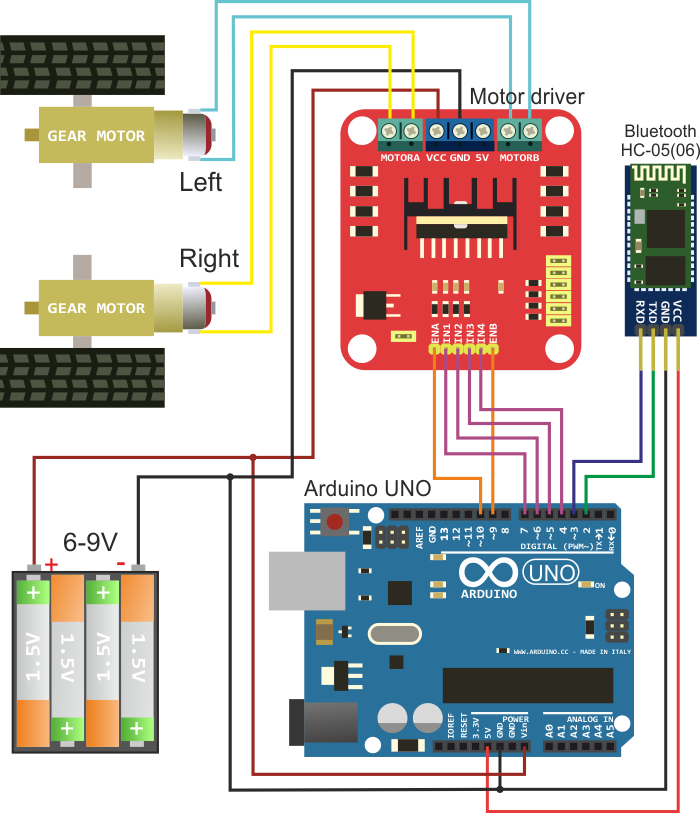
|



