

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
 |
| |||
|
 |
| |||
| ||||
 |
|
Ventilator non-invasif open source Murah dan mudah dibuat, respirator darurat untuk memerangi krisis kesehatan Covid19 jika tidak ada ventilator yang tersedia dan selama pasien tidak dibius atau diintubasi.
Proyek ini adalah hasil dari tantangan yang diluncurkan oleh mantan guru dan teman saya Serafim Pires yang menghubungi saya untuk menunjukkan proyek Spanyol, mengatakan bahwa akan lebih baik jika saya dapat mengembangkan proyek untuk membantu memerangi krisis dunia ini.
Setelah beberapa penelitian dan studi tentang topik Ventilasi non-invasif saya membangun prototipe fungsional ini berdasarkan 2 teknologi yang ada,
Semua pengujian berhasil dan dengan pengujian fungsional selama lebih dari 20 hari tanpa masalah atau gangguan.
Ventilasi non-invasif diberikan menggunakan masker hidung, yang mendorong sejumlah udara bertekanan ke dalam paru-paru. Ini mendukung proses pernapasan alami ketika penyakit telah menyebabkan gagal paru-paru, memungkinkan tubuh melawan infeksi dan menjadi lebih baik.
Berdasarkan penelitian yang dilakukan di Italia, saya menggunakan teknologi ini Dalam proyek saya yang mengubah masker snorkel Decathlon menjadi ventilator darurat untuk pasien yang menderita COVID-19, untuk membantu mengurangi kekurangan ventilator selama puncak pandemi virus corona.
Masker ini telah diadaptasi dan digunakan di berbagai lokasi di seluruh dunia karena biayanya yang rendah dan adaptasi yang mudah.
Hasilnya terbukti dan, baru-baru ini, teknologi ini juga digunakan di sini, di Portugal, di Rumah Sakit Santarém.

https://www.prosaude.org.br/noticias/hospital-regional-de-santarem-utiliza-mascaras-de-mergulho-no-tratamento-da-covid-19/?fbclid=IwAR36UVLXCztk0zSSJwTCBQ1lgb5iYmY1Ha_tqw P>
Berita di surat kabar di portugal.

Wawancara di radio lokal menjadi viral di jejaring sosial di Portugal.
.
Tes operasi pertama menggunakan volume kecil udara dan menggunakan 15 siklus pernapasan mengubah frekuensi pernapasan dan mengintip untuk demonstrasi.
PERINGATAN:Prototipe ini belum divalidasi oleh badan resmi mana pun dan saya menolak semua tanggung jawab untuk penggunaannya.
Selain itu, peralatan ini akan digunakan sebagai upaya terakhir dan oleh tenaga medis terlatih, peralatan ini dimaksudkan untuk menyelamatkan nyawa dalam situasi puncak yang ekstrem.
Proyek nirlaba dapat direplikasi secara massal, jika disetujui oleh otoritas yang berwenang di Portugal.
/* Program pulmonary ventilator INOVT COVID-19 Versi 2.2 * Autor:David Pascoal * Peralatan telah diuji dan terbukti, keamanan dengan sensor tekanan, * Output alarm untuk menyalakan Buzer atau kumbang.*/#termasuk#termasuk #termasuk LiquidCrystal_I2C lcd (0x27,20,4); #menentukan PIN_SERVO 6 #menentukan PIN_FREQ A1 #menentukan PIN_PEEP A0 #menentukan PIN_LED 2 #menentukan PIN_LED2 3 #menentukan PIN_Alarm_Relay 8 #menentukan PIN_Safety_Valve 9#menentukan SENSOR_FLOW A3#menentukan MAX_LEFINERANDOIN_ANGLE 92 =0;int valInspira =0;int valExpira =0;int valPeep =0; int aux; intx =500; int y =1000;lama tidak ditandatangani;Servo myServo;int frecuencia_ant;int valPeep_ant;int estado;void logo(){ byte a3[8]={ B00011, B00111, B01100, B11000, B10000, B00000, B00000 };byte a2 [8]={B00000, B00000, B00000, B00000, B10001, B11111, B01110};byte a1[8]={B11000, B01100, B00110, B00011, B00001, B00000, B00000};byte a4[9]={ B000000 , B00000, B00000, B00001, B00011, B00110, B01100, B11000 };byte a5[9]={ B00000, B01110, B11111, B10001, B00000, B00000, B00000, B01110, B00000,};byte a6[8]={ B00000, B00000, B00000, B10000, B11000, B01100, B00110, B00011};byte a7[10]={ B00000, B01110, B11111, B10001, B00000, B00000, B00000, B00000, };byte a8[8]={B00100 , B01110, B00100, B00000, B10001, B11111, B01110}; lcd.print("*COVID19*"); lcd.setCursor(0,1); lcd.print("..INOVT.."); lcd.createChar(0,a1); lcd.createChar(1,a2); lcd.createChar(2,a3); lcd.createChar(7,a8); lcd.createChar(3,a4); lcd.createChar(4,a5); lcd.createChar(5,a6); lcd.createChar(6,a7); lcd.setCursor(10,0); lcd.write(byte(3)); lcd.write(byte(4)); lcd.write(byte(5)); lcd.write(byte(3)); lcd.write(byte(6)); lcd.write(byte(5)); lcd.setCursor(10,1); lcd.tulis(byte(0)); lcd.write(byte(1)); lcd.write(byte(2)); lcd.tulis(byte(0)); lcd.write(byte(7)); lcd.write(byte(2)); }void initior() { byte c11[8] ={B00000,B00000,B11111,B11111,B11111,B11111,B00000,B00000};lcd.createChar(3, c11);lcd.setCursor(0, 2); lcd.tulis(3); delay(x);lcd.setCursor(1, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,HIGH);lcd.setCursor(2, 2); lcd.tulis(3); delay(x);lcd.setCursor(3, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED2,HIGH);lcd.setCursor(4, 2); lcd.tulis(3); delay(x);lcd.setCursor(5, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,RENDAH);lcd.setCursor(6, 2); lcd.tulis(3); delay(x);lcd.setCursor(7, 2);lcd.write(3); penundaan (x); digitalWrite(PIN_LED2,LOW);lcd.setCursor(8, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,TINGGI); digitalWrite(PIN_LED2,HIGH);lcd.setCursor(9, 2); lcd.tulis(3); penundaan (x); myServo.write(100); digitalWrite(PIN_LED,RENDAH); digitalWrite(PIN_LED2,LOW);lcd.setCursor(10, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,TINGGI); digitalWrite(PIN_LED2,HIGH);lcd.setCursor(11, 2);lcd.write(3); penundaan (x); myServo.write(110); digitalWrite(PIN_LED,RENDAH); digitalWrite(PIN_LED2,LOW);lcd.setCursor(12, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,TINGGI); digitalWrite(PIN_LED2,TINGGI); lcd.setCursor(13, 2); lcd.tulis(3); penundaan (x); myServo.write(115); digitalWrite(PIN_LED,RENDAH); digitalWrite(PIN_LED2,LOW);lcd.setCursor(14, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,TINGGI); digitalWrite(PIN_LED2,HIGH);lcd.setCursor(15, 2); lcd.tulis(3); penundaan (x); myServo.write(120); digitalWrite(PIN_LED,RENDAH); digitalWrite(PIN_LED2,RENDAH); lcd.setCursor(16, 2); lcd.tulis(3); penundaan (x); digitalWrite(PIN_LED,TINGGI); digitalWrite(PIN_LED2,TINGGI); lcd.setCursor(17, 2); lcd.tulis(3); delay(x);myServo.write(130); digitalWrite(PIN_LED,RENDAH); digitalWrite(PIN_LED2,LOW);lcd.setCursor(18, 2); lcd.tulis(3); penundaan (x); lcd.setCursor(19, 2); lcd.tulis(3); delay(x);}void maobc() { thumbdownA(); penundaan (x); lcd.clear(); jempolan(); penundaan (x); jempol ke bawahA(); penundaan (x); lcd.clear(); jempolan(); penundaan (x); jempol ke bawahA(); penundaan (x); lcd.clear(); jempolan(); penundaan (x); jempol ke bawahA(); penundaan (x); lcd.clear(); jempolan(); penundaan (1000); lcd.clear();} void thumbdownA() { byte thumb1[8] ={B00001,B00010,B00011,B00100,B00011,B00100,B00011,B00100}; byte thumb2[8] ={B00011,B00000,B00000,B00000,B00000,B00000,B00000,B00000}; byte thumb3[8] ={B11110,B00001,B00000,B00000,B00000,B00000,B00000,B00000}; byte thumb4[8] ={B00000,B11110,B01000,B10001,B10010,B10010,B01100,B000000}; byte thumb5[8] ={B00000,B10000,B01110,B00010,B00010,B00010,B00010,B00010}; byte thumb6[8] ={B00110,B01000,B10000,B00000,B00000,B00000,B00000,B00000}; lcd.createChar(6, ibu jari1); lcd.createChar(1, ibu jari2); lcd.createChar(2, jempol3); lcd.createChar(3, jempol4); lcd.createChar(4, ibu jari5); lcd.createChar(5, ibu jari6); lcd.setCursor(7,0); lcd.tulis(6); lcd.setCursor(7,1); lcd.tulis(1); lcd.setCursor(8,0); lcd.tulis(2); lcd.setCursor(8,1); lcd.tulis(3); lcd.setCursor(9,0); lcd.tulis(4); lcd.setCursor(9,1); lcd.write(5);}void thumbsup() { byte thumb1[8] ={B00100,B00011,B00100,B00011,B00100,B00011,B00010,B00001}; byte thumb2[8] ={B00000,B00000,B00000,B00000,B00000,B00000,B00000,B00011}; byte thumb3[8] ={B00000,B00000,B00000,B00000,B00000,B00000,B00001,B11110}; byte thumb4[8] ={B00000,B01100,B10010,B10010,B10001,B01000,B11110,B00000}; byte thumb5[8] ={B00010,B00010,B00010,B00010,B00010,B01110,B10000,B000000}; byte thumb6[8] ={B00000,B00000,B00000,B00000,B00000,B10000,B01000,B00110}; lcd.createChar(6, ibu jari1); lcd.createChar(1, ibu jari2); lcd.createChar(2, jempol3); lcd.createChar(3, jempol4); lcd.createChar(4, ibu jari5); lcd.createChar(5, thumb6); lcd.setCursor(7,1); lcd.tulis(6); lcd.setCursor(7,0); lcd.tulis(1); lcd.setCursor(8,1); lcd.tulis(2); lcd.setCursor(8,0); lcd.tulis(3); lcd.setCursor(9,1); lcd.tulis(4); lcd.setCursor(9,0); lcd.write(5);}void setServo(){ if ( milis()> time ) { if ( estado ==EXPIRANDO ) { // Pasar inspirandO digitalWrite(PIN_LED2,LOW); digitalWrite(PIN_LED,TINGGI); myServo.write(MIN_ANGLE); waktu =milis() + (valInspira * 100); estado =INSPIRANDO; lcd.setCursor(8, 2); lcd.print("EXPIRANDO> "); } else if ( estado ==INSPIRANDO ) { // P0asar a expirando digitalWrite(PIN_LED2,HIGH); digitalWrite(PIN_LED,RENDAH); myServo.write(MAX_ANGLE - valPeep); waktu =milis() + (valExpira * 100); estado =EXPIRANDO; lcd.setCursor(8, 2); lcd.print("INSPIRANDO <"); } }}pengaturan batal() { myServo.attach(PIN_SERVO); myServo.write(92); //digitalWrite(PIN_LED,RENDAH); pinMode(PIN_FREQ,INPUT_PULLUP); pinMode(PIN_PEEP,INPUT_PULLUP); pinMode(SENSOR_FLOW,INPUT); pinMode(PIN_LED,OUTPUT); pinMode(PIN_LED2,OUTPUT); pinMode(PIN_Alarm_Relay,OUTPUT); pinMode(PIN_Safety_Valve,OUTPUT); lcd.init(); lcd.lampu latar(); lcd.clear(); lcd.setCursor(0,0); logo(); lcd.setCursor(4,2); lcd.print("OPEN-SOURCE"); lcd.setCursor(0,3); lcd.print("Ventilasi Paru"); penundaan (4000); lcd.clear(); lcd.print("...Inisialisasi...."); inisiator(); penundaan (500); lcd.clear(); maobc(); lcd.clear(); if(digitalRead(SENSOR_FLOW) ==RENDAH) { thumbsup(); lcd.setCursor(0,0); lcd.print("SISTEM"); lcd.setCursor(2,1); lcd.print("Oke"); penundaan(5000); lcd.clear(); } else { myServo.write(139); jempol ke bawahA(); lcd.setCursor(0,0); lcd.print("SISTEM"); lcd.setCursor(1,1); lcd.print("GAGAL"); penundaan(5000); lcd.clear(); Serial.begin(9600); waktu =mili(); frecuencia_ant=-1; valPeep_ant=-1; } penundaan (500); estado=EXPIRANDO; }void loop() {digitalRead(SENSOR_FLOW); aux =analogRead(PIN_FREQ); frecuencia =peta(aux,0,1023, 10, 60); valInspira =((1.0 / frecuencia )* 600.0 ) * (1.0/3.0); valExpira =((1.0 / frecuencia ) * 600.0 ) * (2.0/3.0); aux =analogRead(PIN_PEEP); valPeep =peta(aux,0,1023, 0, 10); if ( (frecuencia_ant !=frecuencia) || (valPeep_ant !=valPeep)) { //Pode monitorizar os valores de Frequencia e PEEP sem display usando o Monitor seri lakukan Arduino IDE. Serial.print("Frekuensi:"); Serial.println(frekuensi); Serial.print("Inspirasi :"); Serial.println(valInspira); Serial.print("Kedaluwarsa:"); Serial.println(valExpira); Serial.print("Intip:"); Serial.println(valPeep); lcd.setCursor(1, 0); lcd.print("FREKUENSI:"); lcd.setCursor(13, 0); lcd.print(frekuensi); lcd.setCursor(1, 1); lcd.print("Mengintip:"); lcd.setCursor(13, 1); lcd.print(valPeep); // tunda(500); lcd.setCursor(0, 2); lcd.print("ESTADO:"); lcd.setCursor(0, 3); lcd.print("VENTILADOR D.PASCOAL"); frecuencia_ant =frecuencia; valPeep_ant =valPeep; } if(digitalRead(SENSOR_FLOW) ==TINGGI) { myServo.write(139); digitalWrite(PIN_Alarm_Relay,TINGGI); digitalWrite(PIN_Safety_Valve,TINGGI); lcd.clear(); jempol ke bawahA(); lcd.setCursor(0,0); lcd.print("SISTEM"); lcd.setCursor(1,1); lcd.print("GAGAL"); lcd.setCursor(1,2); lcd.print("******************"); lcd.setCursor(3,3); lcd.print("Periksa aliran AR"); lcd.setCursor(12,1); lcd.print("ALARM"); digitalWrite(PIN_LED,TINGGI); digitalWrite(PIN_LED2,TINGGI); penundaan (500); lcd.setCursor(12,1); lcd.print(""); penundaan (500); lcd.setCursor(12,1); lcd.print("ALARM"); digitalWrite(PIN_LED,RENDAH); digitalWrite(PIN_LED2,RENDAH); penundaan (1000); lcd.clear(); } else { digitalWrite(PIN_Alarm_Relay,RENDAH); digitalWrite(PIN_Safety_Valve,RENDAH); setServo(); delay(10);}}
Tidak ada pratinjau (hanya unduhan).
 Petunjuk langkah demi langkah lengkap untuk mengganti masker selam dan mengubahnya menjadi masker pernapasan bertekanan
Petunjuk langkah demi langkah lengkap untuk mengganti masker selam dan mengubahnya menjadi masker pernapasan bertekanan 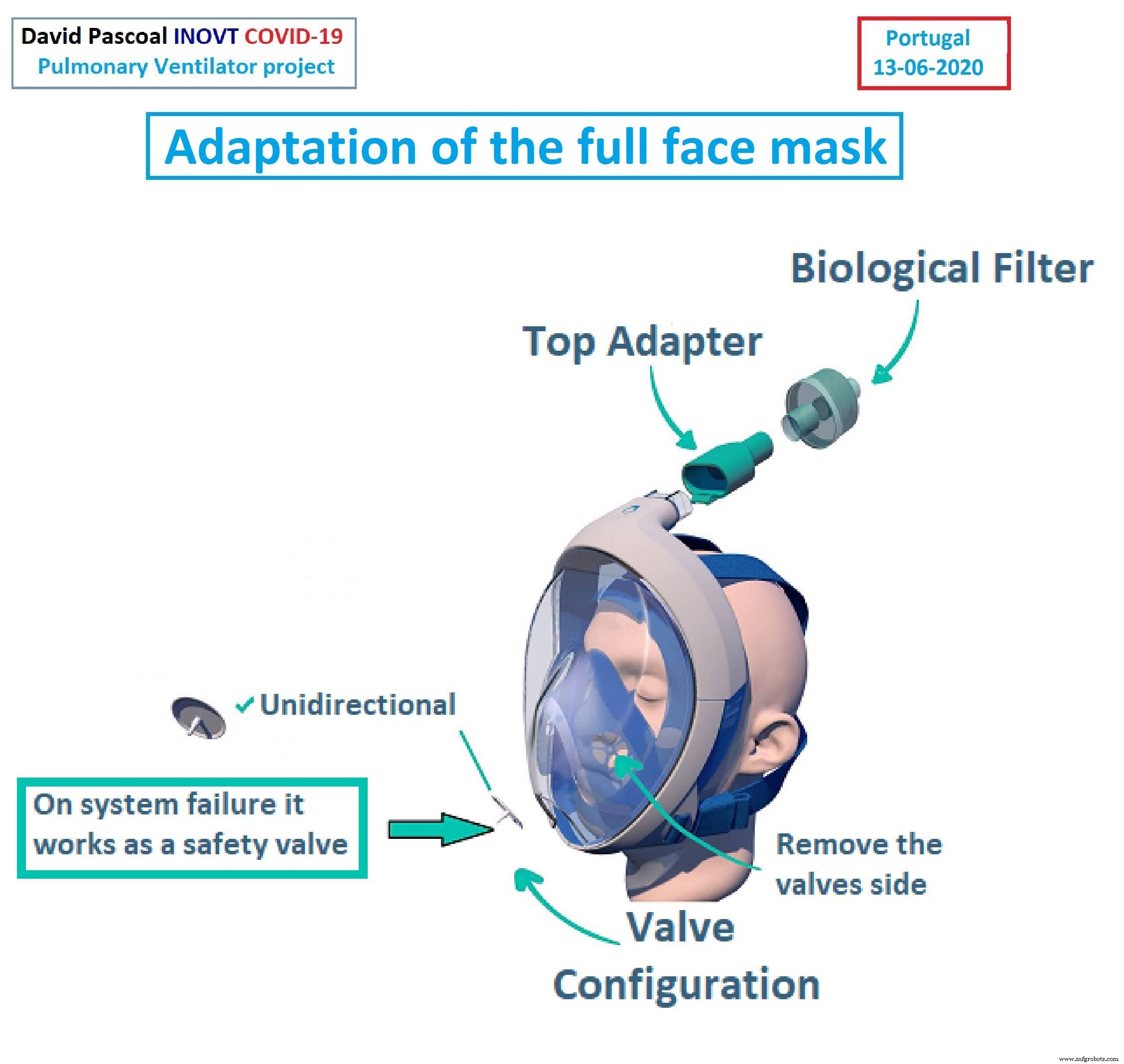 Memerlukan ketelitian.
Memerlukan ketelitian. 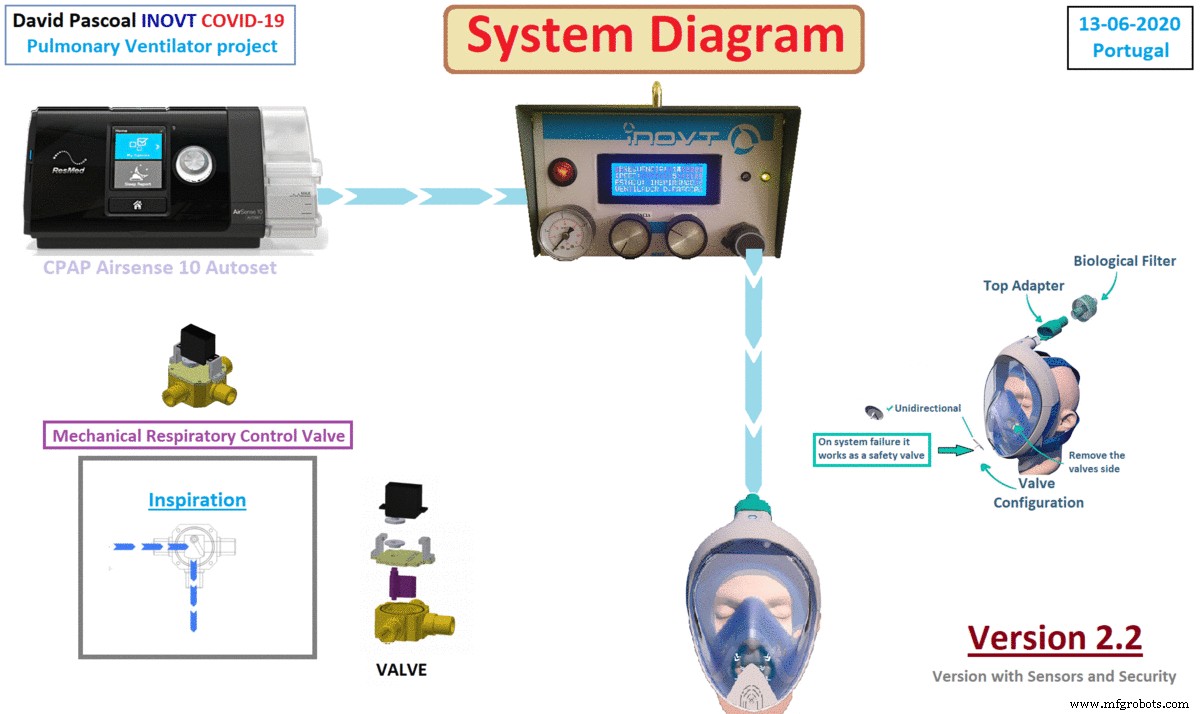 Versi 2.2 .
Versi 2.2 . 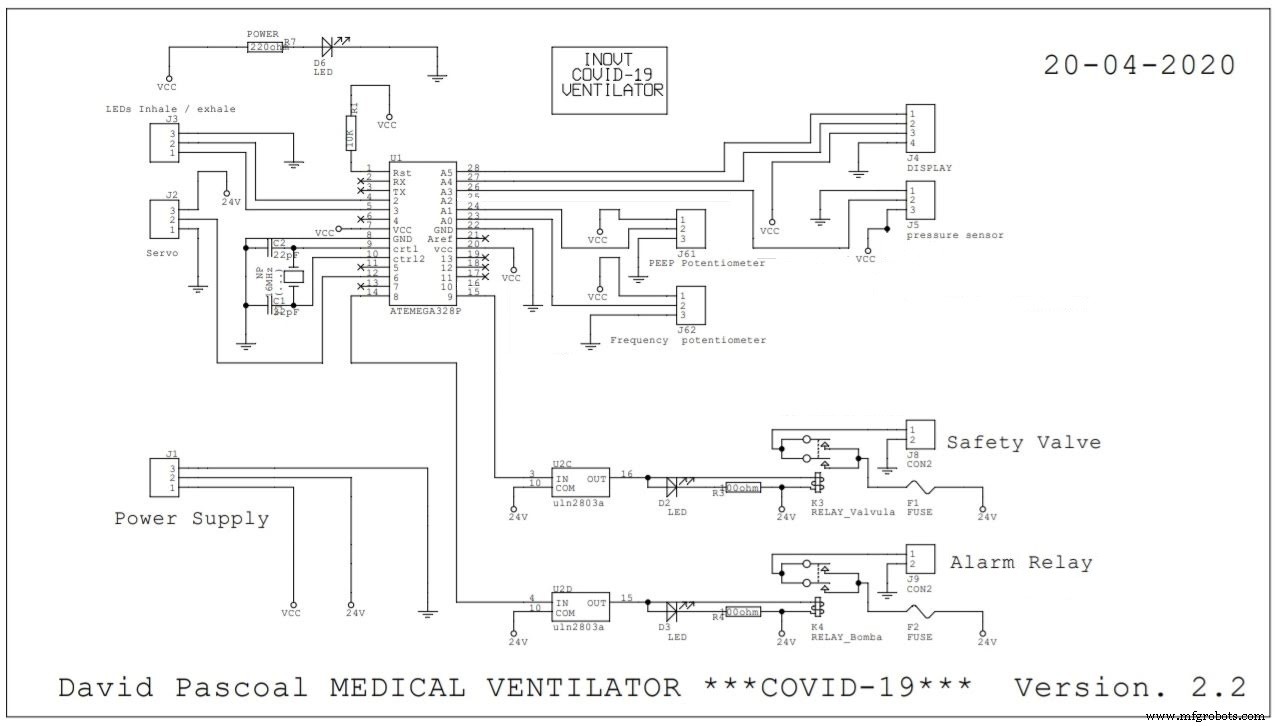 Versi 2.2 .
Versi 2.2 . 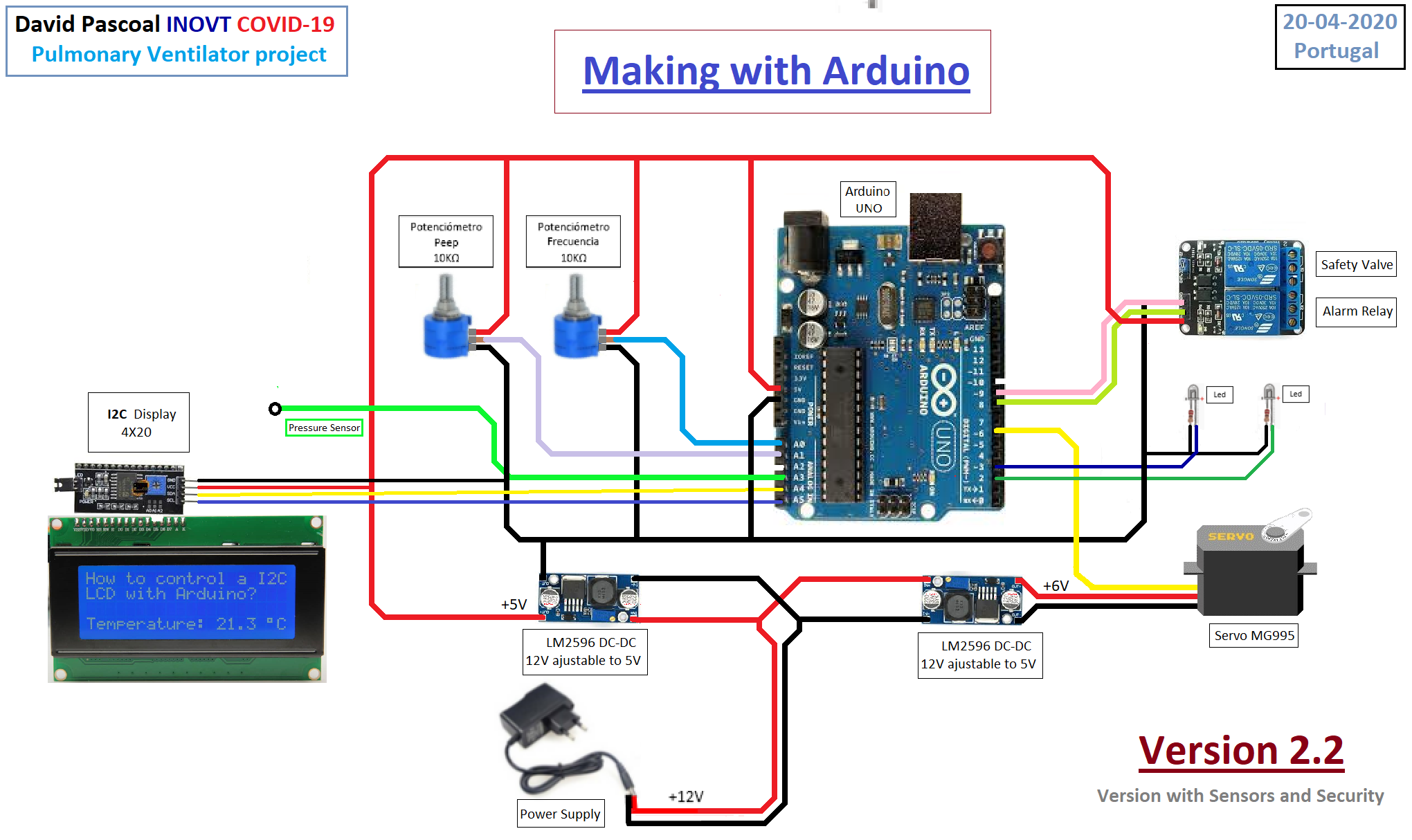
Proses manufaktur
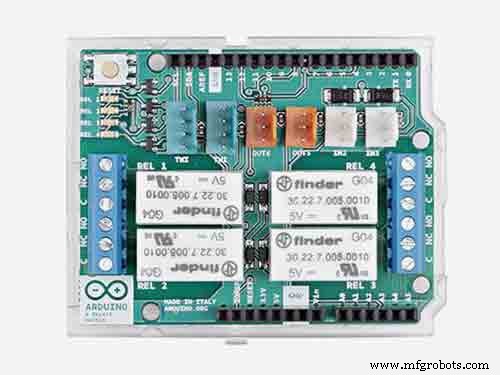
Komponen dan persediaan Arduino UNO × 1 Sensor Pencari Jangkauan ToF SparkFun - VL6180 VL53L0X untuk jarak jauh dan VL6180X untuk jarak dekat. disini saya menggunakan VL6180X × 1 motor servo × 1 Aplikasi dan layanan online Arduino IDE Memproses
Komponen dan persediaan Arduino MKR1000 × 1 Klik Lingkungan MikroE × 1 Alat dan mesin yang diperlukan Kabel jumper Adafruit Wanita/Wanita Aplikasi dan layanan online Arduino IDE WolkAbout IoT Platform Tentang proyek ini
Komponen dan persediaan Arduino UNO × 1 Arduino Mega 2560 × 1 LCD alfanumerik, 16 x 2 × 1 OLED Grafis, 128 x 64 Piksel × 1 DFRobot I2C 16x2 Arduino LCD Display Module × 1 Kabel jumper (generik) × 1 Melalui Resistor Lubang, 470 koh
Komponen dan persediaan Arduino Nano R3 × 1 Maxim Integrated MAX30102 Sensor Denyut Jantung dan Denyut Jantung × 1 Display DRobot Gravity I2C OLED-2864 × 1 Alat dan mesin yang diperlukan Printer 3D (generik) Besi solder (generik) Apli