

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 20 |
 |
| |||
 |
|
 |
| |||
 |
|
Sinopsis
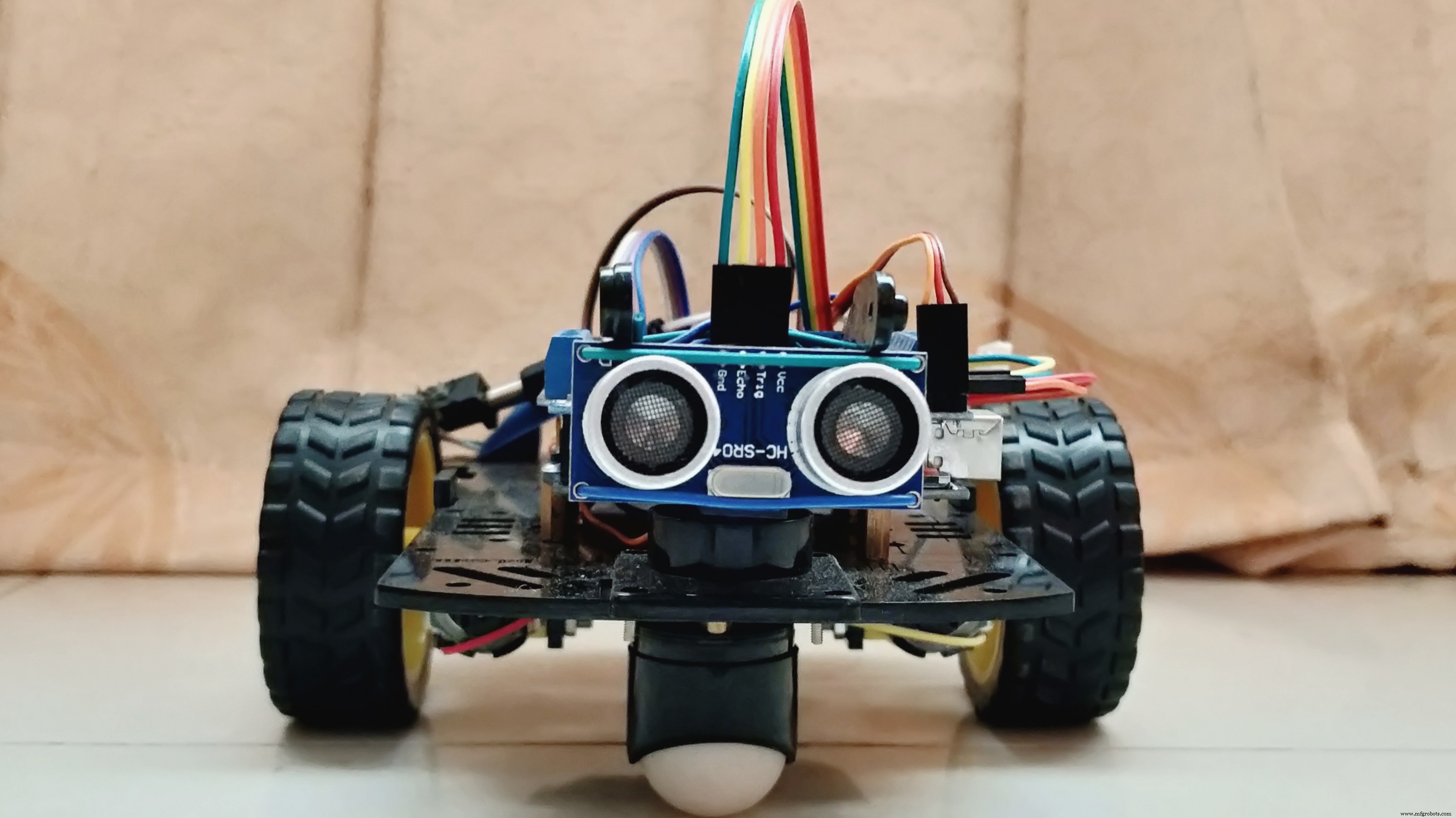
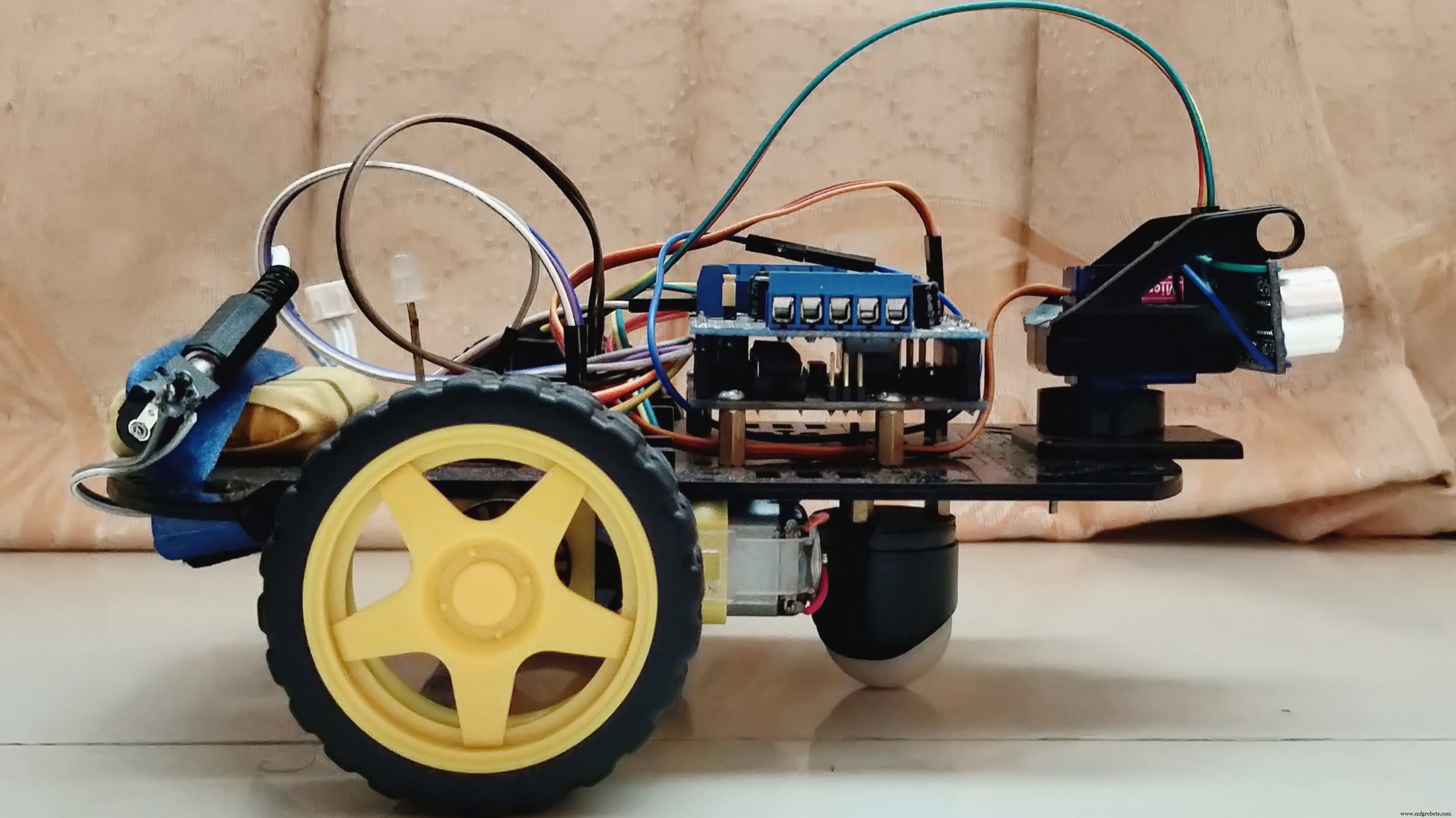
Makalah ini mewakili desain Robot Penghindar Rintangan dengan kemampuan mendeteksi objek di jalurnya dan menavigasi di sekitar objek tersebut dengan membuat keputusan yang tepat. Ini menunjukkan unit robot berdasarkan Arduino UNO dan Adafruit Motor Shield di mana kodenya ditulis dalam Software Arduino IDE. Penghindaran rintangan adalah salah satu faktor kunci yang cukup besar untuk mengembangkan robot seluler. Implementasi Sensor Jarak Ultrasonik yang ditempatkan pada Motor Servo Mikro menghasilkan lebih presisi untuk mendeteksi objek di sekitarnya. Robot yang dirancang ini berbeda dari robot lain yang tersedia karena integrasi Buzzer Magnetik dan LED Difusi CC RGB yang telah mencapai kemampuan untuk menunjukkan prosedur pendeteksian objek dan mengontrol kecepatan Motor Gear DC dalam 4 jenis keadaan. Sebagai robot otonom, potensi untuk bermanuver melalui kondisi yang tidak diketahui tanpa menimbulkan dampak apa pun dijalankan. Selain itu, teknologi yang dirancang ini dapat digunakan untuk operasi militer dan bantuan kemanusiaan dengan meningkatkan kapasitas deteksi objek di lingkungan yang beragam.
Multimedia

Interpretasi
Pustaka yang disertakan ditambahkan dalam kode blok adalah sebagai berikut,
AFMotor.h
Servo.h Koneksi yang ditentukan yang ditetapkan dalam kode sebaris adalah sebagai berikut,
tentukan BuzzPIN A0
tentukan TrigPIN A1
tentukan EchoPIN A2
tentukan LEDBPIN A3
tentukan LEDGPIN A4
tentukan LEDRPIN A5
tentukan DCMROFF 25
Program antisipasi yang disediakan dalam arsitektur robot adalah sebagai berikut,
Semua operasi akan berjalan secara mandiri tanpa memerlukan kontrol eksternal apa pun.
Proyek ini menyajikan detail penting untuk merancang robot bergerak yang diimplementasikan dengan kemampuan menghindari rintangan, menavigasi sendiri, dan menunjukkan gerakan motor roda gigi DC dengan menyalakan warna selektif dari LED CC RGB yang disebarkan dalam 4 situasi berbeda. Robot yang dirancang menunjukkan varians dari robot penghindar rintangan lainnya dalam hal indikasi cahaya-suara, kontrol kecepatan motor, dan teknik manuver yang intens dengan mendeteksi rintangan dengan jarak 180 derajat di depan robot; yang merupakan tugas yang sulit untuk digabungkan melalui pemrograman yang tepat. Robot dibangun di atas platform Arduino UNO Rev3 dengan bantuan perangkat lunak Arduino IDE v1.8.5 untuk integrasi kode perakitan yang tepat untuk memperoleh fungsi yang diperlukan. Integrasi itu membuat robot mampu melakukan operasi yang diperlukan tanpa interaksi manusia dan dengan akurasi yang cukup besar. Dengan pengembangan lebih lanjut dengan menggabungkan kamera siaran dan teknologi nirkabel, robot ini dapat digunakan secara efektif untuk operasi militer untuk mendeteksi berbagai jenis kegiatan, sedangkan unit dasarnya dapat berguna untuk membantu manusia yang memiliki gangguan penglihatan atau pendengaran untuk memberi tahu lokasi objek di sekitarnya.
Etalase Proyek Youth Zest
#include// Tambahkan Adafruit Motor Shield untuk perpustakaan kit Arduino.#include // Tambahkan perpustakaan Servo Motor.#define BuzzPIN A0 // Tetapkan PIN A0 sebagai BuzzPIN (Hubungkan PIN Arduino UNO "A0" dengan PIN Buzzer "+").#definisikan TrigPIN A1 // Tetapkan PIN A1 sebagai TrigPIN (Hubungkan PIN Arduino UNO "A1" dengan Sensor Ultrasonik Sonar "Trig" PIN).#define EchoPIN A2 // Tetapkan PIN A2 sebagai EchoPIN (Hubungkan PIN Arduino UNO "A2" dengan PIN "Trig" Sensor Ultrasonik Sonar).#definisikan LEDBPIN A3 // Tetapkan PIN A3 sebagai LEDBPIN (Hubungkan Arduino UNO "A3" PIN dengan PIN RGB Diffused Common Cathode "LEDB").#definisikan LEDGPIN A4 // Tetapkan PIN A4 sebagai LEDGPIN (Hubungkan PIN Arduino UNO "A4" dengan PIN RGB Diffused Common Cathode "LEDG").#define LEDRPIN A5 // Tetapkan PIN A5 sebagai LEDRPIN (Hubungkan PIN Arduino UNO "A5" dengan PIN RGB Diffused Common Cathode "LEDR").#define DCMROFF 25 // Ini menetapkan Offset untuk memungkinkan perbedaan antara dua Motor traksi DC.AF_DCMo untuk M1 (1, MOTOR12_64KHZ); // Buat DCMotor #1 menggunakan output M1, Setel ke frekuensi PWM 64kHz.AF_DCMotor M2 (2, MOTOR12_64KHZ); // Buat DCMotor #2 menggunakan output M2, Setel ke frekuensi PWM 64kHz.Servo SER1; // Buat objek Servo untuk mengontrol Servo.int Search (void) { // Deklarasi variabel tipe integer. float Durasi =0,0; // Deklarasi variabel tipe float. mengambang CM =0,0; // Deklarasi variabel tipe float. digitalWrite (TrigPIN, RENDAH); // Output TrigPIN sebagai 0V (Logika level rendah). delayMicroseconds (2); // Tunda selama 2us, Kirim 10 pulsa tinggi ke Sensor Sonar Ultrasonik "TrigPIN". digitalWrite (TrigPIN, TINGGI); // Output TrigPIN sebagai 5V (Logika level tinggi). delayMicroseconds (10); // Penundaan selama 10 kita. digitalWrite (TrigPIN, RENDAH); // Output TrigPIN sebagai 0V (Logika level rendah). Durasi =pulseIn (EchoPIN, TINGGI); // Mulai menghitung waktu, Upto lagi EchoPIN kembali ke logika "Tingkat Tinggi" dan menempatkan "Waktu" ke dalam variabel yang disebut "Durasi". CM =(Durasi/58.8); // Konversi Jarak ke CM. kembali CM; // Kembali ke CM.}int RightDistance, LeftDistance; // Jarak di kedua sisi.float Distance =0.00; // Deklarasi variabel tipe float.void setup () { // Setup loop. pinMode (BuzzPIN, OUTPUT); // Deklarasikan BuzzPIN sebagai "PIN Keluaran". pinMode (TrigPIN, OUTPUT); // Deklarasikan TrigPIN sebagai "PIN Keluaran". pinMode (EchoPIN, INPUT); // Deklarasikan EchoPIN sebagai "PIN Keluaran". pinMode (LEDBPIN, OUTPUT); // Deklarasikan LEDBPIN sebagai "PIN Keluaran". pinMode (LEDGPIN, OUTPUT); // Deklarasikan LEDGPIN sebagai "PIN Keluaran". pinMode (LEDRPIN, OUTPUT); // Deklarasikan LEDRPIN sebagai "PIN Keluaran". SER1.attach (10); // Memasang Servo pada pin 10 (SER1 pada Adafruit Motor Shield untuk kit Arduino ke objek Servo).}void loop () { // Main loop. SER1.tulis (80); // Memberitahu Servo ke posisi 80 derajat (Menghadap ke depan). penundaan (100); // Penundaan selama 0,1 detik. Jarak =Cari (); // Mengukur Jarak dalam CM. if (Jarak <30) { // Jika rintangan ditemukan dalam jarak 30cm. digitalWrite (BuzzPIN, TINGGI); // Keluaran BuzzPIN sebagai 5V (Logika tingkat tinggi). digitalWrite (LEDBPIN, RENDAH); // Output LEDBPIN sebagai 0V (Logika level rendah). digitalWrite (LEDGPIN, RENDAH); // Output LEDGPIN sebagai 0V (Logika level rendah). digitalWrite (LEDRPIN, TINGGI); // Output LEDRPIN sebagai 5V (Logika tingkat tinggi). M1.setSpeed (100); // Mempercepat. M2.setSpeed (100); // Mempercepat. Ubah Jalur(); // Jika forward terhalang Ubah arah. } else if ((Jarak>=30) &&(Jarak <60)) { // Jika hambatan ditemukan antara 30cm sampai 60cm. digitalWrite (BuzzPIN, RENDAH); // Keluaran BuzzPIN sebagai 0V (Logika level rendah). digitalWrite (LEDBPIN, TINGGI); // Output LEDBPIN sebagai 5V (Logika tingkat tinggi). digitalWrite (LEDGPIN, RENDAH); // Output LEDGPIN sebagai 0V (Logika level rendah). digitalWrite (LEDRPIN, RENDAH); // Output LEDRPIN sebagai 0V (Logika level rendah). M1.setSpeed (150); // Kecepatan meningkat sedikit. M2.setSpeed (150); // Kecepatan meningkat sedikit. Maju (); // Robot bergerak ke arah Maju. } else if ((Jarak>=60) &&(Jarak <90)) { // Jika hambatan ditemukan antara 60cm sampai 90cm. digitalWrite (BuzzPIN, RENDAH); // Keluaran BuzzPIN sebagai 0V (Logika level rendah). digitalWrite (LEDBPIN, RENDAH); // Output LEDBPIN sebagai 0V (Logika level rendah). digitalWrite (LEDGPIN, TINGGI); // Output LEDGPIN sebagai 5V (Logika tingkat tinggi). digitalWrite (LEDRPIN, RENDAH); // Output LEDRPIN sebagai 0V (Logika level rendah). M1.setSpeed (200); // Mempercepat. M2.setSpeed (200); // Mempercepat. Maju (); // Robot bergerak ke arah Maju. } else { // Jika rintangan tidak dapat ditemukan dalam 90cm. digitalWrite (BuzzPIN, RENDAH); // Keluaran BuzzPIN sebagai 0V (Logika level rendah). digitalWrite (LEDBPIN, TINGGI); // Output LEDBPIN sebagai 5V (Logika tingkat tinggi). digitalWrite (LEDGPIN, TINGGI); // Output LEDGPIN sebagai 5V (Logika tingkat tinggi). digitalWrite (LEDRPIN, TINGGI); // Output LEDRPIN sebagai 5V (Logika tingkat tinggi). M1.setSpeed (250); // Kecepatan meningkat sepenuhnya. M2.setSpeed (250); // Kecepatan meningkat sepenuhnya. Maju (); // Robot bergerak ke arah Maju. }}void ChangePath () { // Perulangan Perubahan Path. Berhenti (); // Robot Berhenti. Mundur (); // Robot berjalan Arah mundur. Berhenti (); // Robot Berhenti. SER1.tulis (12); // Periksa Jarak ke Kanan. penundaan (500); // Penundaan selama 0,5 detik. Jarak Kanan =Pencarian (); // Atur Jarak yang Tepat. penundaan (500); // Penundaan selama 0,5 detik. SER1.tulis (160); // Periksa Jarak ke Kiri. penundaan (1000); // Penundaan selama 1 detik. LeftDistance =Cari (); // Atur Jarak Kiri. penundaan (500); // Penundaan selama 0,5 detik. SER1.tulis (80); // Kembali ke tengah. penundaan (500); // Penundaan selama 0,5 detik. BandingkanJarak(); // Cari jarak terjauh.}void CompareDistance () { // Jarak Membandingkan loop. if (Jarak Kanan> Jarak Kiri) { // Jika Kanan kurang terhalang. Belok kanan (); // Robot Belok ke arah Kanan. } else if (LeftDistance> RightDistance) { // If Left kurang terhalang. Belok kiri (); // Robot Belok ke arah Kiri. } else { // Jika keduanya sama-sama terhalang. Berputar (); // Robot Berbalik. }}void Maju () { // Maju loop. M1.run (MAJU); // Putar DCMotor #1 ke Forward. M2.run (MAJU); // Putar DCMotor #1 ke Forward.}void Backward () { // Backward loop. M1.run (Mundur); // Putar DCMotor #1 ke Mundur. M2.run (Mundur); // Putar DCMotor #2 ke Mundur. penundaan (500); // Penundaan selama 1 detik.}void Belok Kanan () { // Putaran Belok Kanan. M1.run (Mundur); // Putar DCMotor #1 ke Mundur. M2.run (MAJU); // Putar DCMotor #2 ke Forward. M1.setSpeed (100+DCMROFF); // Kalibrasi Kecepatan Motor DC #1. penundaan (300); // Penundaan selama 0,7 detik.}void TurnLeft () { // Putaran Kiri. M1.run (MAJU); // Putar DCMotor #1 ke Forward. M2.run (Mundur); // Putar DCMotor #2 ke Mundur. M2.setSpeed (100+DCMROFF); // Kalibrasi Kecepatan Motor DC #2. penundaan (300); // Penundaan selama 0,7 detik.}void TurnAround () { // Putaran Putaran. M1.run (MAJU); // Putar DCMotor #1 ke Forward. M2.run (Mundur); // Putar DCMotor #2 ke Mundur. M2.setSpeed (100+DCMROFF); // Kalibrasi Kecepatan Motor DC #2. penundaan (700); // Penundaan selama 2,1 detik.}void Stop () { // Stop loop. M1.run (RILIS); // Lepaskan DCMotor #1. M2.run (RILIS); // Lepaskan DCMotor #2. penundaan (100); // Penundaan selama 0,1 detik.}
Proses manufaktur
Komponen dan persediaan SparkFun Arduino Pro Mini 328 - 3.3V/8MHz × 1 Servo (Tower Pro MG996R) × 1 Sakelar Geser × 1 OpenBuilds Cable Ties (10 Pack) × 1 Kabel jumper (generik) × 1 Baterai Li-Ion 1000mAh × 1 Bola Ping Pong × 1
Komponen dan persediaan Arduino UNO × 1 Adafruit 16 Channel PWM Servo Motor Controller × 3 Motor servo mikro SG90 × 36 Sumber Daya Sakelar 5 volt 30 watt × 1 Ekstensi Kabel Motor Servo × 1 24 inci x 48 inci. Papan Pasak × 1 Stik es kr
Komponen dan persediaan Arduino MKR1000 × 1 Nano Hub Sensor Infineon × 1 LCD Nokia 5110 × 1 Modul Bluetooth HC-05 × 1 Breadboard (generik) × 1 Kabel jumper (generik) × 1 Sakelar Tombol Tekan SparkFun 12mm × 1 Buzzer
Komponen dan persediaan Arduino MKR IoT Bundle × 1 Aplikasi dan layanan online Zpier ThingSpeak API Tentang proyek ini Catatan:Tutorial ini mungkin sudah usang, silakan buka di sini untuk versi yang lebih baru. Pendahuluan Seperti yang pernah