Robot Pasca Prosesor:Semua yang Perlu Anda Ketahui
Tidak tahu pascaprosesor mana yang harus dipilih? Berikut adalah 5 langkah untuk memilih pasca-prosesor robot yang sempurna.
Post-processors adalah jembatan antara perangkat lunak pemrograman offline dan robot Anda.
Jika Anda memilih post-processor yang tepat, program Anda akan bekerja di luar kotak — robot yang sebenarnya akan bergerak persis seperti saat simulasi. Namun, jika Anda memilih pascaprosesor yang salah, Anda berada dalam masa yang sulit — robot mungkin bergerak tidak menentu, mungkin bergerak ke arah yang salah, atau mungkin tidak bergerak sama sekali.
RoboDK menyediakan banyak pascaprosesor yang berbeda untuk dipilih. Sebaiknya pahami cara kerja pasca-prosesor, cara memilih yang tepat, dan cara menyesuaikan atau membuat pasca-prosesor Anda sendiri jika yang disediakan tidak tepat untuk Anda.
Artikel ini akan memberi tahu Anda semua yang perlu Anda ketahui tentang pascaprosesor robot di RoboDK.
Apa itu Pasca-Prosesor?
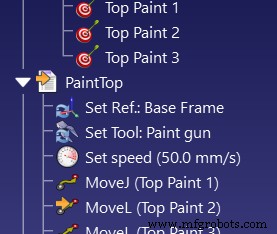
Sebagian besar program robot berisi perintah dasar yang sama, yang digunakan berulang kali. Tiga yang paling umum adalah:
- Pindahkan Sendi — Ini memindahkan robot ke suatu titik di ruang angkasa dengan mengirimkan sambungan robot ke posisi yang diinginkan secepat mungkin, yang berguna saat bergerak melalui ruang kosong.
- Pindahkan Linier — Ini memindahkan robot dari posisi saat ini ke suatu titik di ruang angkasa dengan mengikuti garis yang tepat, yang berguna saat bergerak untuk mengambil objek, melukis, dll.
- Setel Kecepatan — Ini menentukan kecepatan end effector dan/atau sendi robot.
Perangkat lunak pemrograman offline membuat program menggunakan versi umum dari perintah ini (dan lainnya) yang dapat diterapkan ke robot apa pun.
Robot Berbicara Bahasa yang Berbeda
Masalahnya adalah setiap pabrikan yang berbeda memiliki cara yang berbeda untuk memprogram perintah ke dalam robot mereka. Banyak produsen memiliki bahasa pemrograman kustom mereka sendiri dan beberapa bahkan menggunakan perintah yang sedikit berbeda untuk versi pengontrol yang berbeda.
Misalnya, berikut adalah cara ketiga perintah yang saya sebutkan di atas diekspresikan untuk pengontrol robot yang berbeda. Dalam tanda kurung, saya juga telah menunjukkan jumlah minimum parameter dan nilai yang diperlukan untuk mengontrol robot 6DoF:
| Robot | Gerakan Bersama | Gerakan Linier | Setel Kecepatan | Pembulatan Jalur |
| ABB IRC5 | MoveJ (4) | Pindahkan (4) | speeddata(4) | zonedata(4) |
| Fanuc RJ3 | J (2) | L (2) | kecepatan (1) | CNT (1) |
| Kawasaki | JMOVE (1) | LMOVE (1) | KECEPATAN (1) | AKURASI (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| Motoman JBI | MOVJ (2) | MOVL (2) | VJ/V (1) | PL (1) |
| Robot Universal | movej (1) | gerakan/gerakan (1) | v(1) | r (1) |
Seperti yang Anda lihat, setiap perintah serupa antara setiap jenis robot. Namun, ada perbedaan dalam susunan kata dan jumlah informasi yang diperlukan untuk mendefinisikan setiap instruksi.
Tanpa pemrograman offline dan pasca-prosesor, Anda harus mempelajari bahasa pemrograman yang sama sekali baru setiap kali Anda memprogram robot jenis baru. Ini secara signifikan memperlambat pemrograman robot.
Post-Processors Memudahkan
Post-processors bekerja dengan menerjemahkan perintah ke dalam program khusus untuk model robot Anda.
Dengan RoboDK, Anda tidak perlu mempelajari bahasa pemrograman untuk membuat robot Anda bergerak. Pasca-prosesor yang disediakan biasanya cukup untuk menghasilkan kode bebas bug yang dapat digunakan untuk lebih dari 30 merek robot.
Post-processor juga menghasilkan semua kode inisiasi yang diperlukan dan definisi variabel, yang sering kali sulit didefinisikan dalam pemrograman berbasis teks biasa.
5 Langkah untuk Memilih Pasca-Prosesor yang Sempurna
RoboDK hadir dengan lebih dari 40 pasca-prosesor. Anda harus memilih pascaprosesor yang tepat untuk pengontrol robot Anda.
Bagaimana Anda memilih di antara keduanya?
Jika Anda telah menggunakan salah satu robot dari Perpustakaan Robot kami, Anda akan menemukan bahwa satu pascaprosesor telah dipilih sebagai default. Seringkali, ini mengasumsikan Anda menggunakan pengontrol terbaru (atau default) untuk robot itu. Namun, Anda mungkin perlu memilih yang lain jika kiriman default tidak sesuai dengan kebutuhan aplikasi atau pengaturan Anda.

1. Pilih Post-Processor untuk Merek Robot Anda
Biasanya, yang terbaik adalah mencoba post-processor default atau paling dasar terlebih dahulu.
Beberapa merek robot hanya memiliki satu opsi yang disediakan secara default di RoboDK, mis. Mecademic, Kawasaki, CLOOS, dll. Dalam hal ini, pilihan Anda sangat sederhana.
2. Pilih Pasca-Prosesor untuk Pengontrol Anda
Beberapa merek robot memiliki pascaprosesor yang berbeda untuk pengontrol atau versi bahasa pemrograman yang berbeda. Misalnya, Denso memiliki satu pasca-prosesor untuk pengontrol RC7 yang lebih lama dan satu untuk pengontrol RC8 yang lebih baru, karena di antara model-model ini mereka berpindah dari pemrograman dalam bahasa pemrograman PAC ke pemrograman dalam PacScript.
Gunakan post-processor untuk pengontrol spesifik Anda jika tersedia. Jika tidak ada opsi untuk pengontrol khusus Anda, coba yang paling dekat dengan nomor versi pengontrol Anda.
3. Pilih Post-Processor untuk Aplikasi Anda
Beberapa merek robot memiliki beberapa prosesor pos yang berbeda. KUKA punya 10!
Beberapa prosesor pos tambahan adalah untuk aplikasi atau penyiapan tertentu. Misalnya, ada 5 pasca-prosesor untuk pengontrol KUKA KRC2. Dua di antaranya adalah untuk aplikasi yang menggunakan add-on penggilingan CamRob atau kontrol KUKA CNC, yang memungkinkan ribuan baris kode dalam satu file program (cocok untuk pemesinan robot). Salah satunya khusus untuk aplikasi Arc Welding. Demikian pula, ada post-processor UR yang mengintegrasikan pegangan Robotiq.
Jika ada post-processor untuk pengontrol Anda yang benar untuk aplikasi atau pengaturan spesifik Anda, gunakan itu. Namun, jika tidak ada untuk aplikasi Anda, gunakan saja post-processor dasar untuk merek dan pengontrol Anda.
4. Pilih Post-Processor yang Dapat Anda Perbarui dengan Mudah
Terkadang, program yang dibuat oleh RoboDK tidak sepenuhnya tepat untuk aplikasi Anda. Anda mungkin ingin menambahkan baris kode tambahan untuk memperluas fungsionalitas. Ini sangat mudah dilakukan jika Anda sedikit terbiasa dengan bahasa pemrograman robot Anda.
Beberapa post-processor disediakan untuk memudahkan mengubah dan memperbarui kode yang dihasilkan.
Misalnya, KUKA KRC2 memiliki opsi yang menghasilkan file DAT. Ini adalah fitur menarik dari kontroler KUKA. Dalam konfigurasi ini, posisi disimpan sebagai variabel ke dalam file DAT terpisah, yang terkadang dapat mempermudah pembaruan kode karena Anda hanya perlu mengubah variabel untuk mengubah posisi.
Demikian pula, ada dua pasca-prosesor Siemens Sinumerik:satu di mana posisinya dinyatakan dalam milimeter dan yang lainnya dinyatakan dalam inci.
Pilih post-processor yang memudahkan Anda memperbarui kode robot, jika perlu.
5. Buat atau Sesuaikan Pemroses Posting
Dalam beberapa keadaan, Anda mungkin perlu menulis pascaprosesor Anda sendiri, seperti saat Anda menggunakan robot dalam konfigurasi unik.
Anda mungkin juga ingin menyesuaikan pascaprosesor yang ada untuk penyiapan atau aplikasi spesifik Anda.
Sangat mudah untuk menulis pascaprosesor khusus di RoboDK karena semuanya adalah program Python dan ditulis dalam format yang serupa.
Anda dapat melihat tutorial sederhana yang menunjukkan cara membuat atau memperbarui post-processor di video ini.
Lihat halaman pasca-pemroses dalam dokumentasi kami untuk detail selengkapnya.
Pertanyaan apa yang Anda miliki tentang pasca-prosesor? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di Tertaut Di , Twitter , Facebook atau Instagram .


