Berapa Banyak Sumbu yang Dibutuhkan Robotic Positioner Anda?
Anda telah memutuskan bahwa Anda memerlukan pengatur posisi robot... tetapi berapa banyak sumbu yang Anda butuhkan?
Ada begitu banyak model positioner dengan begitu banyak gaya yang berbeda. Beberapa memiliki 1 sumbu sederhana tetapi yang lain memiliki banyak!
Yang lebih membingungkan lagi adalah rentang konfigurasi yang dapat dimiliki oleh positioner. Sumbu dapat dipasang secara vertikal, horizontal, dan pada sudut mana pun di antaranya.
Memilih positioner dengan terlalu banyak atau terlalu sedikit sumbu dapat berarti pemborosan anggaran; Tapi berapa banyak yang terlalu banyak!?
Jika Anda mempertimbangkan positioner robot, sekarang Anda mungkin telah melihat beberapa model yang berbeda. Anda mungkin pernah melihat turntable sumbu tunggal, positioner sumbu ganda, dan kincir ria multi-sumbu. Anda mungkin telah menjelajahi berbagai merek, gaya, dan rentang harga.
Sekarang, jika Anda jujur, Anda mungkin mulai bosan dengan positioner.
Masalah dengan positioner adalah bahwa ini bukan hanya kasus sederhana untuk mengatakan "Saya akan membeli yang ini" dan membiarkannya begitu saja. Positioner yang Anda pilih akan memengaruhi seberapa mudahnya mengintegrasikan dan memprogram sel robot Anda. Anda tidak ingin memilih yang salah dan memberi diri Anda waktu yang lebih sulit daripada yang diperlukan untuk menerapkan dan memprogram robot.
Misalnya, jika Anda ingin mendapatkan positioner 5-sumbu dengan robot 6-sumbu, itu adalah 11 sumbu yang perlu Anda kendalikan! Jika perlu memiliki banyak sumbu, baiklah. Namun, jika tidak perlu, Anda mungkin menyesali pembelian Anda.
Mengapa “Berapa Banyak Sumbu?” Adalah Pertanyaan Membingungkan
Menanyakan berapa banyak sumbu yang dibutuhkan mekanisme Anda adalah pertanyaan yang sangat wajar. Namun, ini adalah pertanyaan yang sulit untuk dijawab dengan memuaskan.
Ketika kita berbicara tentang robot industri saja, jawaban umum adalah mengatakan bahwa robot 6-sumbu diperlukan. Hal ini tidak selalu benar tetapi itu benar sebagian besar waktu. Alasannya adalah bahwa diperlukan 6 sumbu untuk mencapai titik di ruang kerja robot dari posisi dan orientasi apa pun.
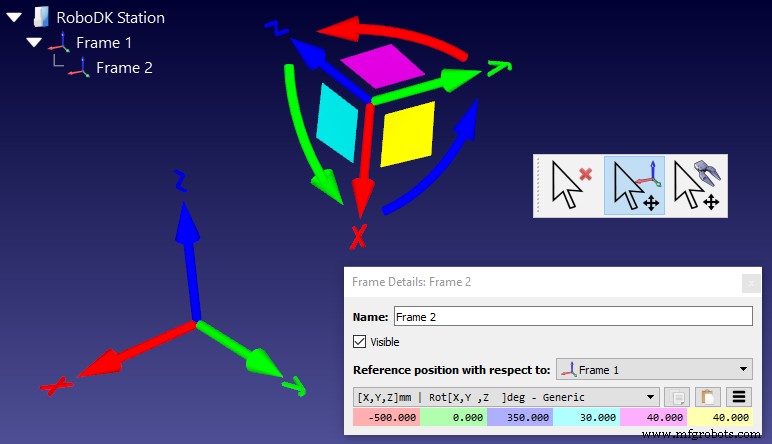
Seperti yang kami jelaskan di Euler Angle Primer kami, posisi end effector robot dikendalikan dengan 6 parameter:3 parameter translasi (X, Y, dan Z) dan 3 parameter rotasi (Rot[X], Rot[Y], dan Rot [Z]).
Jika robot Anda memiliki kurang dari 6 sumbu, Anda akan membatasi fleksibilitas robot. Ini masuk akal untuk beberapa robot — mis. robot palletizing yang hanya perlu mendekati objek dari atas. Namun, secara umum, robot industri 6 sumbu adalah yang paling berguna untuk berbagai tugas.
Namun, di luar 6-sumbu, mekanisme Anda menjadi "berlebihan".
Misalnya, robot 7-sumbu dapat mencapai titik yang sama di ruang kerja mereka sebagai robot 6-DoF. Namun, kontrol mekanisme yang berlebihan menjadi lebih rumit. Akibatnya, Anda tidak ingin menambahkan DoF tambahan jika tidak diperlukan.
Menambahkan positioner berarti menambahkan lebih banyak DoF ke robot. Ini mungkin atau mungkin tidak mengarah ke sistem yang berlebihan.
Apakah Anda memerlukan DoF tambahan tergantung pada kebutuhan spesifik tugas Anda.
7 Langkah untuk Mengidentifikasi Jumlah Sumbu yang Dibutuhkan untuk Aplikasi Anda
Cara untuk mengetahui berapa banyak sumbu yang Anda butuhkan adalah dengan melihat lebih dekat pada persyaratan aplikasi Anda.
Berikut adalah proses yang dapat Anda gunakan untuk mengidentifikasi beberapa positioner potensial yang dapat bekerja untuk Anda. Ini memungkinkan Anda untuk memperbesar beberapa model potensial dan menilainya dengan benar. Jika tidak ada opsi yang sesuai, Anda dapat memperkecil lagi dan menggunakan informasi yang telah Anda pelajari untuk memilih positioner yang lebih baik.
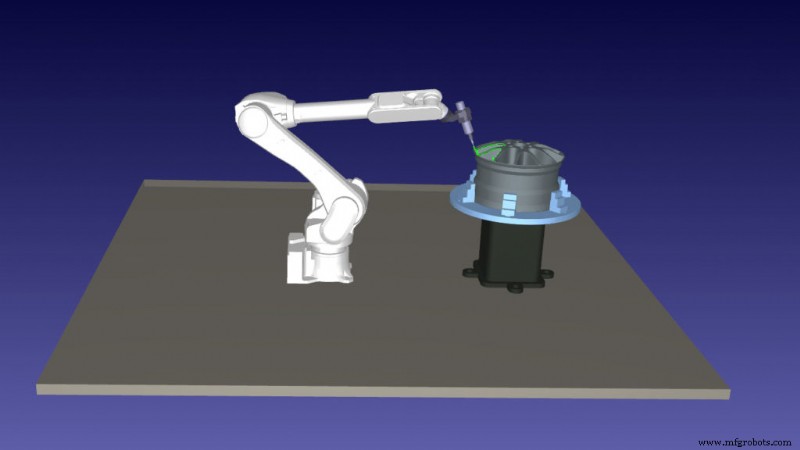
- Lihat persyaratan tugas Anda, dengan fokus terutama pada ruang kerja yang dibutuhkan. Salah satu cara yang baik untuk melakukannya adalah dengan membangun aplikasi Anda dalam simulator robot.
- Perhatikan aspek tugas mana yang tidak mungkin dilakukan saat menggunakan robot saja. Bagian mana dari ruang kerja yang tidak terjangkau? Gerakan mana yang tidak mungkin?
- Dengan informasi ini, tebak satu atau dua jenis positioner yang mungkin sesuai dengan kebutuhan Anda. Ingatlah untuk memperhitungkan muatan yang diperlukan untuk menahan benda kerja Anda.
- Temukan beberapa penentu posisi di pasar yang dapat memenuhi kriteria Anda dan ujilah dalam simulasi Anda. Untuk setiap positioner yang Anda coba, pastikan untuk menyimpan penyiapan Anda sebagai proyek baru karena Anda akan kembali ke salah satu proyek nanti.
- Jika salah satu model bekerja dengan sempurna, bagus! Meski begitu, uji beberapa opsi untuk melihat properti apa yang benar-benar dibutuhkan. Ingatlah bahwa Anda tidak ingin berakhir dengan DoF lebih dari yang Anda butuhkan.
- Jika tidak ada model yang berfungsi untuk aplikasi Anda, gunakan informasi yang telah Anda kumpulkan untuk menyempurnakan persyaratan Anda.
- Kembali ke pasar dan cari satu atau dua model yang memenuhi persyaratan baru ini. Uji lagi dalam simulasi Anda sebelum menentukan pilihan.
Menggunakan proses seperti ini menghilangkan beberapa dugaan dari mengidentifikasi jumlah sumbu yang tepat. Dengan setiap pengujian dalam simulasi, Anda belajar sedikit lebih banyak tentang apa yang benar-benar Anda butuhkan dari positioner untuk menyelesaikan tugas Anda.
Buat Pilihan dan Kerjakan
Setelah Anda memusatkan perhatian pada model yang sesuai untuk tugas Anda, Anda dapat melanjutkan dan mengembangkan aplikasi secara lebih menyeluruh di simulator.

Buka proyek yang Anda simpan dengan positioner pilihan Anda dan perbaiki ke dalam aplikasi lengkap. Ini akan memungkinkan Anda menguji semua aspek tugas dan menyiapkan aplikasi untuk integrasi yang mudah.
Setelah Anda membeli positioner Anda, Anda tidak perlu khawatir tentang apakah lebih banyak sumbu dapat bermanfaat untuk tugas tersebut atau tidak. Robot sangat fleksibel dan biasanya ada banyak cara untuk mencapai tindakan yang sama dengan satu robot.
Jika Anda mengalami masalah saat menggunakan robot, Anda hampir pasti dapat menemukan solusi menggunakan peralatan yang Anda miliki. Ini adalah nilai dari membuat pilihan pembelian menggunakan simulator sebagai meja ujian.
Jenis positioner apa yang telah Anda pertimbangkan? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.


