Berjalan lebih cepat dan lebih jauh dengan Fieldbus
Pakar industri, seperti PROCENTEC, menunjukkan pertumbuhan yang stabil dalam adopsi teknologi fieldbus berbasis RS-485 (PROFIBUS
®
) dan pertumbuhan pesat untuk Industrial Ethernet (PROFINET). Pada tahun 2018, ada 61 juta node fieldbus PROFIBUS yang terpasang di seluruh dunia, dengan otomatisasi proses (PA) PROFIBUS tumbuh 7% YoY. Basis pemasangan PROFINET adalah pada 26 juta node, dengan 5,1 juta perangkat terpasang pada tahun 2018 saja.
1
Dengan pertumbuhan yang stabil dalam adopsi fieldbus RS-485 dan Industri 4.0 mempercepat penyebaran pabrik yang terhubung secara cerdas, memastikan bahwa teknologi fieldbus dioptimalkan membantu mengaktifkan sistem yang cerdas. Teknologi fieldbus yang dioptimalkan harus secara hati-hati menyeimbangkan ketahanan EMC dan transmisi data yang andal.
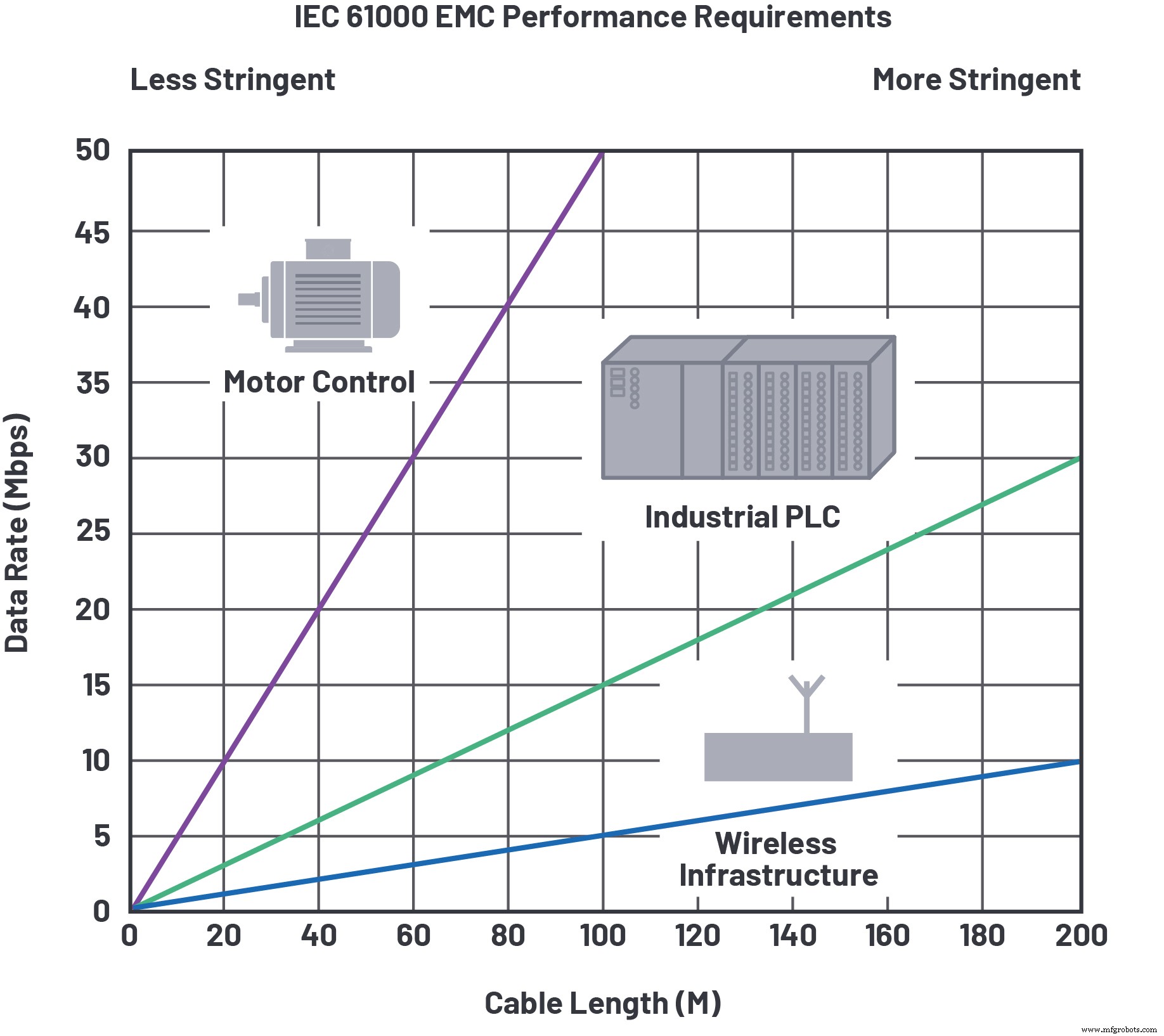
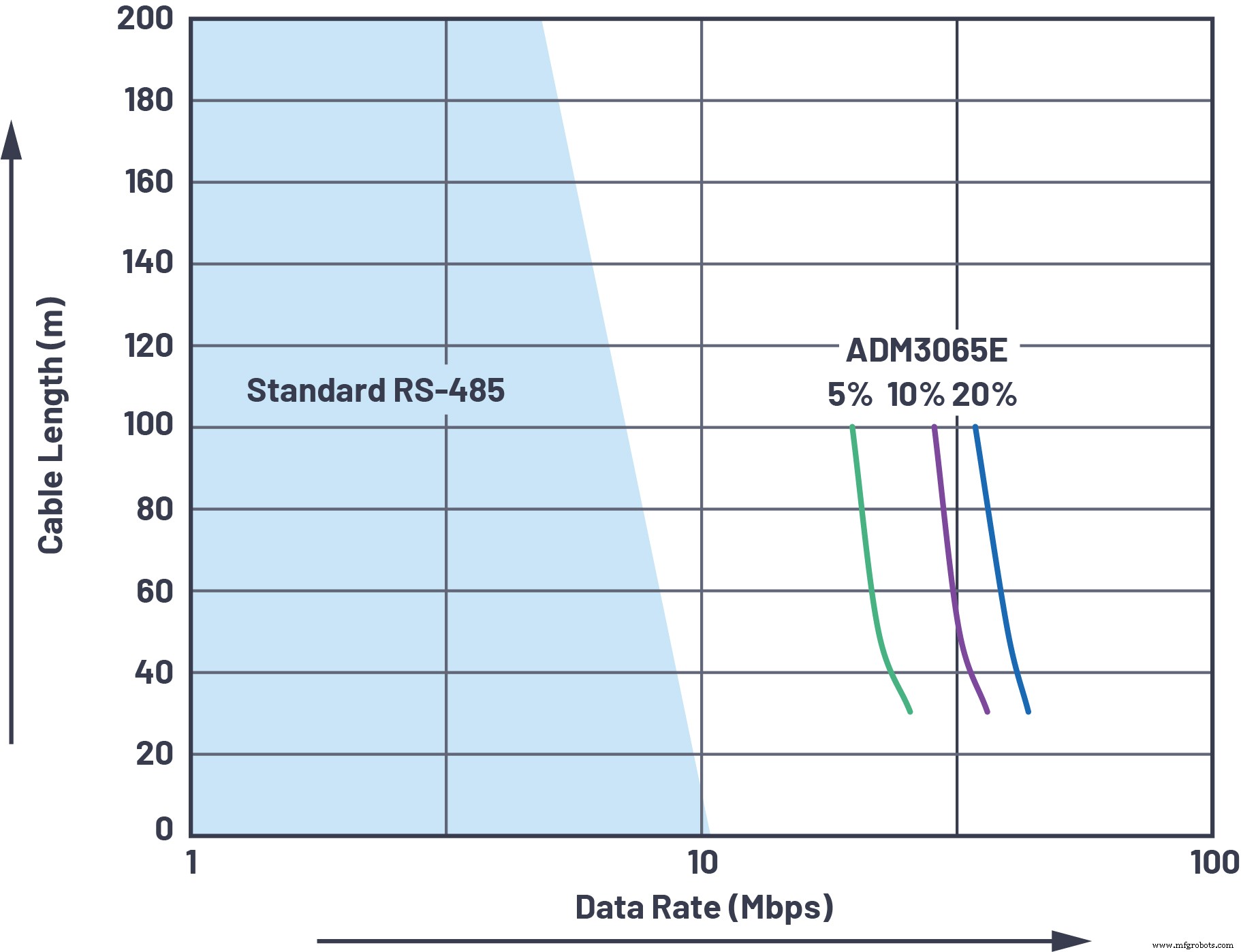
Transmisi data yang tidak dapat diandalkan akan mengurangi kinerja sistem secara keseluruhan. Dalam aplikasi kontrol gerak, fieldbus biasanya digunakan untuk kontrol posisi loop tertutup dari motor sumbu tunggal atau multisumbu. Kecepatan data yang tinggi dan kabel yang panjang merupakan hal yang umum, seperti yang ditunjukkan pada Gambar 1. Jika kontrol posisi tidak dapat diandalkan, maka penurunan kinerja dalam istilah praktis berarti kualitas keluaran alat berat yang lebih rendah dan produktivitas pabrik yang berkurang. Dalam aplikasi infrastruktur nirkabel, fieldbus biasanya digunakan untuk kontrol kemiringan/posisi antena, di mana transmisi data yang akurat sangat penting. Dalam aplikasi kontrol gerak dan infrastruktur nirkabel, diperlukan berbagai tingkat perlindungan EMC, seperti yang ditunjukkan pada Gambar 1. Aplikasi kontrol gerak biasanya beroperasi di lingkungan yang bising secara elektrik, yang dapat menyebabkan kesalahan data. Sebagai perbandingan, infrastruktur nirkabel harus dilindungi dari sambaran petir tidak langsung yang merusak di lingkungan yang terbuka.
Untuk aplikasi yang menuntut ini, pemeriksaan yang cermat terhadap kinerja waktu transceiver RS-485 melalui kabel diperlukan untuk memastikan sistem yang andal, serta karakterisasi EMC. Artikel ini memperkenalkan beberapa konsep kunci waktu sistem dan kabel komunikasi; menyediakan indikator kinerja utama, termasuk jam dan distribusi data dan kemampuan mengemudi kabel; dan menunjukkan manfaat untuk aplikasi industri menggunakan transceiver RS-485 generasi berikutnya.
Kinerja Pengaturan Waktu
Saat mempertimbangkan transmisi data yang andal pada kecepatan data tinggi melalui kabel yang panjang, konsep kinerja pengaturan waktu, seperti jitter dan skew—sering dikaitkan dengan pensinyalan diferensial tegangan rendah (LVDS)—menjadi penting untuk RS-485. Jitter dan skew yang ditambahkan oleh transceiver RS-485 dan kabel sistem perlu diperiksa.
klik untuk gambar lebih besar Gambar 1. EMC, kecepatan data, dan panjang kabel untuk RS-485. (Sumber:Perangkat Analog)
Gitar dan Miring
Jitter dapat dikuantifikasi sebagai kesalahan interval waktu, khususnya perbedaan antara waktu kedatangan yang diharapkan dari transisi sinyal dan ketika transisi itu tiba dalam praktik. Dalam link komunikasi, ada berbagai kontributor jitter. Setiap kontributor dapat secara luas digambarkan sebagai acak atau deterministik di alam. Jitter acak dapat diidentifikasi dari distribusi Gaussiannya dan berasal dari noise termal dan noise tembakan broadband dalam semikonduktor. Hasil jitter deterministik dari sumber dalam sistem komunikasi; misalnya, distorsi siklus tugas, crosstalk, sumber kebisingan eksternal berkala, atau interferensi antarsimbol. Dalam sistem komunikasi yang menggunakan standar RS-485, kecepatan data di bawah 100 MHz, di mana efek jitter deterministik ini mendominasi efek acak.
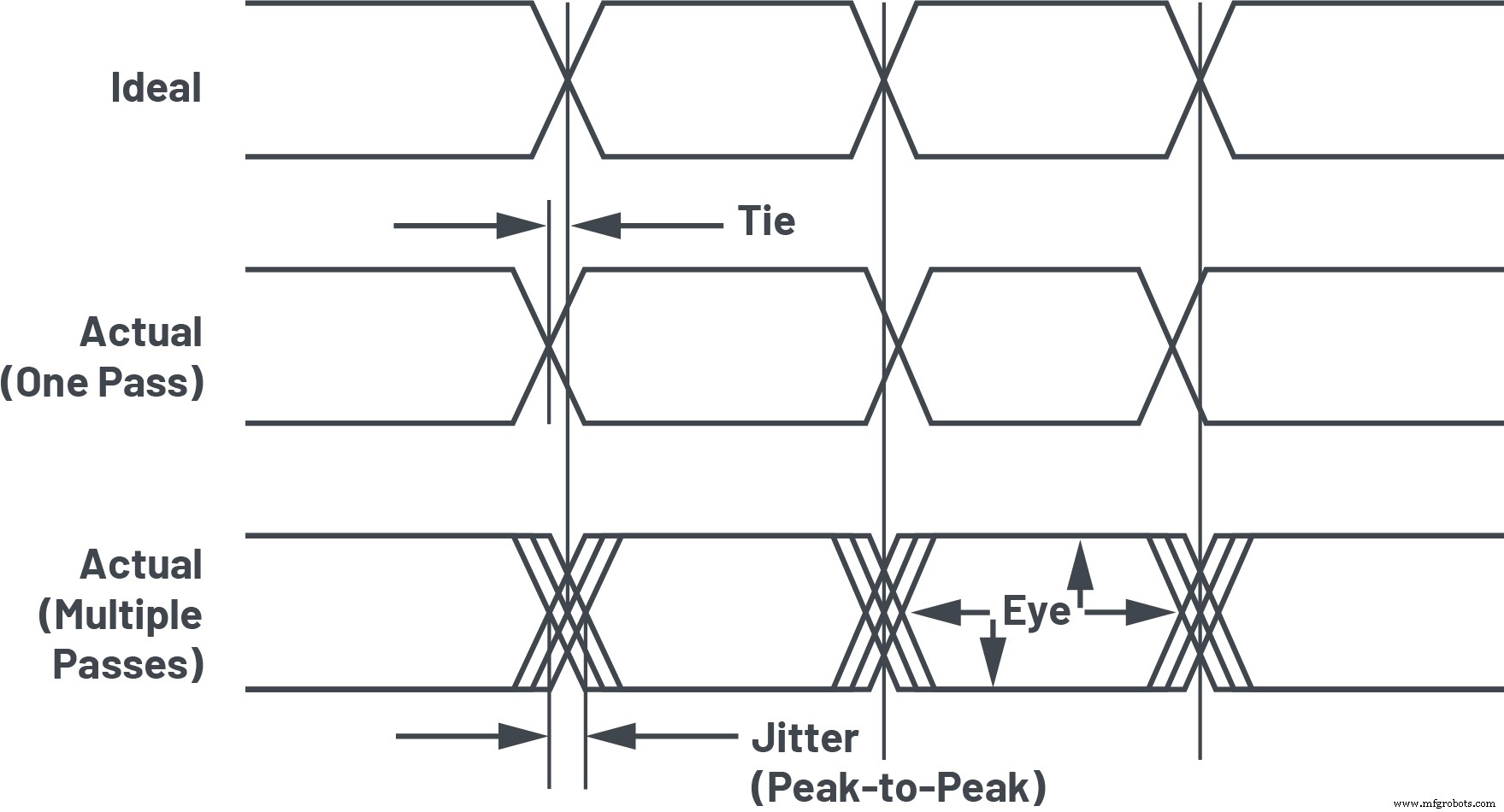
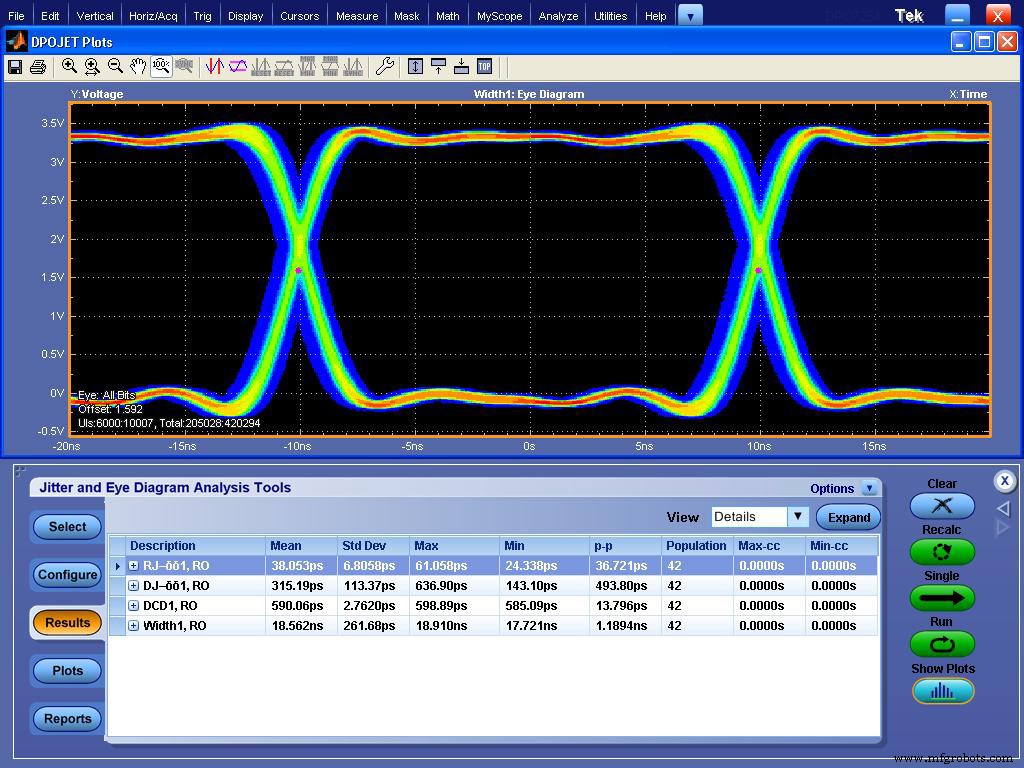
Nilai jitter puncak-ke-puncak adalah ukuran yang berguna dari total jitter sistem yang dihasilkan dari sumber deterministik. Jitter puncak-ke-puncak dapat diperiksa dalam domain waktu dengan menempatkan sejumlah besar transisi sinyal pada tampilan yang sama (umumnya dikenal sebagai diagram mata). Ini dapat dicapai pada tampilan osiloskop menggunakan ketekunan tak terbatas, atau dengan perangkat lunak dekomposisi jitter bawaan osiloskop, seperti yang ditunjukkan pada Gambar 2.
2
klik untuk gambar lebih besar Gambar 2. Interval waktu error, jitter, dan eye. (Sumber:Perangkat Analog)
Lebar transisi overlay adalah jitter puncak-ke-puncak, dengan area terbuka di antaranya disebut sebagai mata. Mata ini adalah area yang tersedia untuk pengambilan sampel oleh node penerima di ujung kabel RS-485 yang panjang. Lebar mata yang lebih besar memberikan node penerima jendela yang lebih luas untuk pengambilan sampel dan mengurangi risiko salah menerima sedikit. Mata yang tersedia terutama dipengaruhi oleh kontribusi jitter deterministik dari driver dan receiver RS-485 dan kabel interkoneksi.
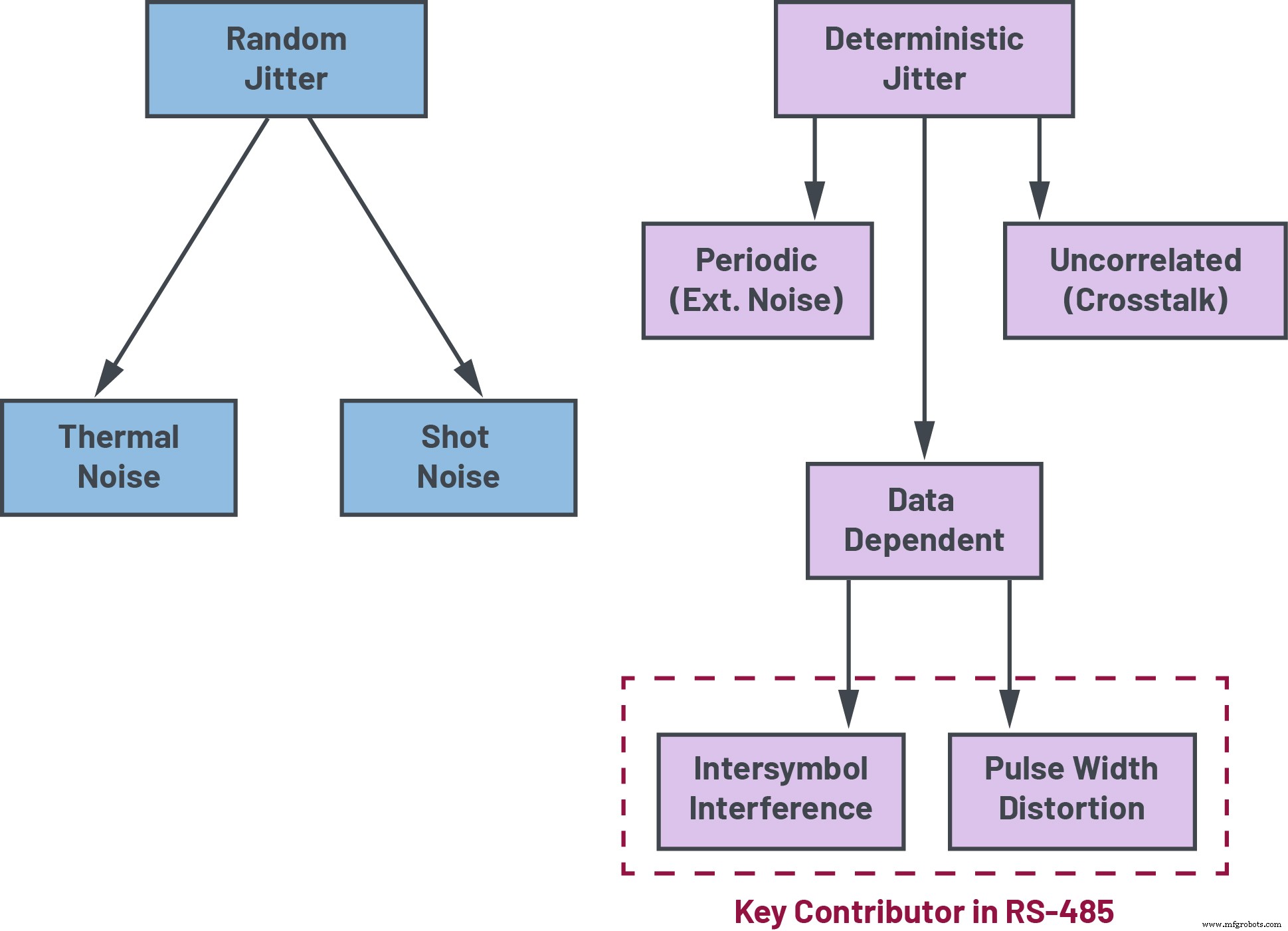
klik untuk gambar lebih besar Gambar 3. Kontributor utama jitter di jaringan komunikasi RS-485. (Sumber:Perangkat Analog)
Gambar 3 menunjukkan berbagai sumber jitter dalam jaringan komunikasi. Dalam sistem komunikasi berbasis RS-485, dua kontributor utama untuk kinerja waktu adalah kemiringan pulsa transceiver dan interferensi antarsimbol. Pulse skew, atau dikenal sebagai distorsi lebar pulsa atau distorsi siklus tugas, adalah bentuk jitter deterministik yang diperkenalkan oleh transceiver pada node pengirim dan penerima. Pulse skew didefinisikan sebagai perbedaan delay propagasi antara sisi naik dan turunnya sinyal. Dalam komunikasi diferensial, kemiringan ini menciptakan titik persilangan asimetris dan ketidaksesuaian antara durasi transmisi 0s dan 1s. Dalam sistem distribusi jam, kemiringan pulsa yang berlebihan memanifestasikan dirinya sebagai distorsi dalam siklus kerja jam yang ditransmisikan. Dalam sistem distribusi data, asimetri ini meningkatkan jitter puncak-ke-puncak yang diamati dalam diagram mata. Dalam kedua kasus, kemiringan pulsa yang berlebihan berdampak negatif pada sinyal yang ditransmisikan melalui RS-485 dan mengurangi jendela pengambilan sampel yang tersedia dan kinerja sistem secara keseluruhan.
Intersymbol Interference (ISI) terjadi ketika waktu kedatangan suatu tepi sinyal dipengaruhi oleh pola data yang telah melewati tepi tersebut. Efek interferensi antarsimbol menjadi menonjol dalam aplikasi dengan interkoneksi kabel yang lebih panjang, menjadikan ISI sebagai kontributor utama dalam jaringan RS-485. Interkoneksi yang lebih lama menciptakan konstanta waktu RC di mana kapasitansi kabel belum terisi penuh pada akhir periode bit tunggal. Dalam aplikasi di mana data yang ditransmisikan hanya terdiri dari jam, bentuk interferensi antarsimbol ini tidak ada. Interferensi antarsimbol juga dapat disebabkan oleh ketidaksesuaian impedansi pada saluran transmisi kabel, dari stub saluran atau penggunaan resistor terminasi yang tidak tepat. Transceiver RS-485 dengan kekuatan penggerak keluaran tinggi umumnya membantu meminimalkan efek ISI karena memerlukan lebih sedikit waktu untuk mengisi kapasitansi beban kabel RS-485.
Persentase jitter puncak-ke-puncak yang dapat ditoleransi sangat bergantung pada aplikasi, dan umumnya jitter 10% digunakan untuk membandingkan kombinasi transceiver RS-485 dan kinerja kabel. Kombinasi jitter dan skew yang berlebihan mempengaruhi kemampuan pengambilan sampel dari penerima RS-485 transceiver, meningkatkan kemungkinan kesalahan komunikasi. Dalam jaringan transmisi yang dihentikan dengan benar, memilih transceiver yang dioptimalkan untuk meminimalkan kemiringan pulsa transceiver dan efek interferensi antarsimbol menghasilkan tautan komunikasi yang lebih andal dan bebas kesalahan.
Desain Transceiver RS-485 dan Efek Kabel
Standar TIA-485-A/EIA-485-A RS-485
3
memberikan spesifikasi untuk desain dan jangkauan operasi pemancar dan penerima RS-485, termasuk diferensial keluaran tegangan (VOD), karakteristik hubung singkat, pemuatan mode umum, dan ambang dan rentang tegangan input. Performa timing RS-485, termasuk skew dan jitter, tidak ditentukan dalam standar TIA-485-A/EIA-485-A, dan dioptimalkan oleh vendor IC dengan spesifikasi lembar data produk.
Standar lain, seperti TIA-568-B.2/EIA-568-B.2, standar telekomunikasi untuk kabel pasangan terpilin
4
memberikan latar belakang untuk efek kabel ac dan dc pada kualitas sinyal RS-485. Standar ini memberikan pertimbangan dan prosedur pengujian untuk jitter, skew, dan pengukuran waktu lainnya, dengan batas kinerja yang ditetapkan; misalnya, kemiringan kabel Kategori 5e maksimum yang diizinkan adalah 45 ns per 100 m. Baca Peningkatan Kinerja RS-485 untuk informasi lebih lanjut tentang standar TIA-568-B.2/EIA-568-B.2 dan konsekuensi penggunaan kabel yang tidak ideal pada kinerja sistem.
Meskipun standar dan lembar data produk yang tersedia menyediakan sumber informasi yang berguna, karakterisasi yang berarti dari kinerja pengaturan waktu sistem memerlukan pengukuran transceiver RS-485 pada kabel panjang.
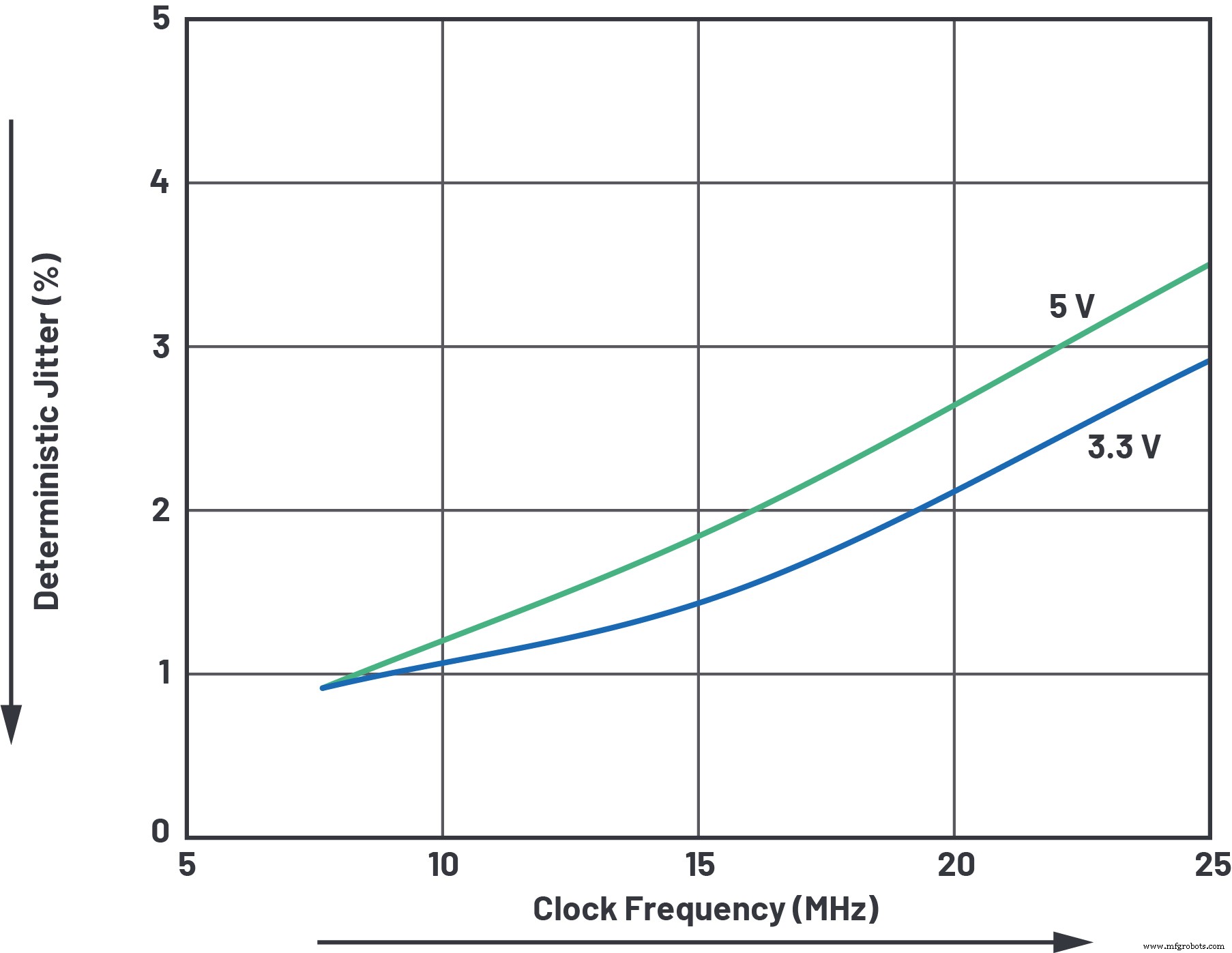
klik untuk gambar lebih besar Gambar 4. Performa clock jitter khas ADM3065E. (Sumber:Perangkat Analog)
Berkomunikasi Lebih Cepat dan Lebih Jauh dengan RS-485
Transceiver RS-475 generasi berikutnya memberikan peningkatan kinerja untuk memenuhi kebutuhan aplikasi yang menggunakan standar seperti TIA-485-A/EIA-485-A yang tidak menentukan kemiringan dan jitter. Misalnya, transceiver RS0485 seperti ADM3065E dari Analog Devices memberikan kinerja kemiringan pemancar dan penerima yang sangat rendah. Hal ini memungkinkan sistem untuk mendukung transmisi jam presisi, yang sering ditampilkan dalam standar enkode motor, seperti EnDat 2.2.
5
Seperti ditunjukkan pada Gambar 4 dan 5, sistem telah didemonstrasikan untuk menunjukkan kurang dari 5% jitter deterministik melintasi panjang kabel tipikal yang ditemui dalam aplikasi kontrol motor. Rentang suplai transceiver yang luas berarti tingkat kinerja waktu ini tersedia untuk aplikasi yang memerlukan catu daya transceiver 3,3 V atau 5 V.
klik untuk gambar lebih besar Gambar 5. Diagram mata penerima ADM3065E:clock 25 MHz didistribusikan melalui kabel 100 m. (Sumber:Perangkat Analog)
Selain distribusi jam yang unggul, kinerja pengaturan waktu yang ditingkatkan juga memungkinkan distribusi data yang andal, dengan output kecepatan tinggi dan jitter tambahan yang minimal. Gambar 6 menunjukkan bahwa dengan menggunakan transceiver yang ditingkatkan, batasan waktu yang biasanya dikutip untuk komunikasi data RS-485 dapat sangat dilonggarkan. Transceiver RS-485 standar biasanya dikutip untuk operasi dengan jitter 10% atau kurang. ADM3065E dapat beroperasi pada kecepatan lebih dari 20 Mbps pada kabel hingga 100 m, dan masih mempertahankan hanya 10% jitter pada node penerima. Tingkat jitter yang rendah ini mengurangi risiko pengambilan sampel yang salah oleh node data penerima, dan menghasilkan keandalan transmisi yang sebelumnya tidak mungkin dilakukan menggunakan transceiver RS-485 biasa. Dalam aplikasi di mana node penerima dapat mentolerir tingkat jitter hingga 20%, kecepatan data hingga 35 Mbps pada jarak 100 m kabel dapat dicapai.
klik untuk gambar lebih besar Gambar 6. ADM3065E menerima kinerja jitter node data yang superior. (Sumber:Perangkat Analog)
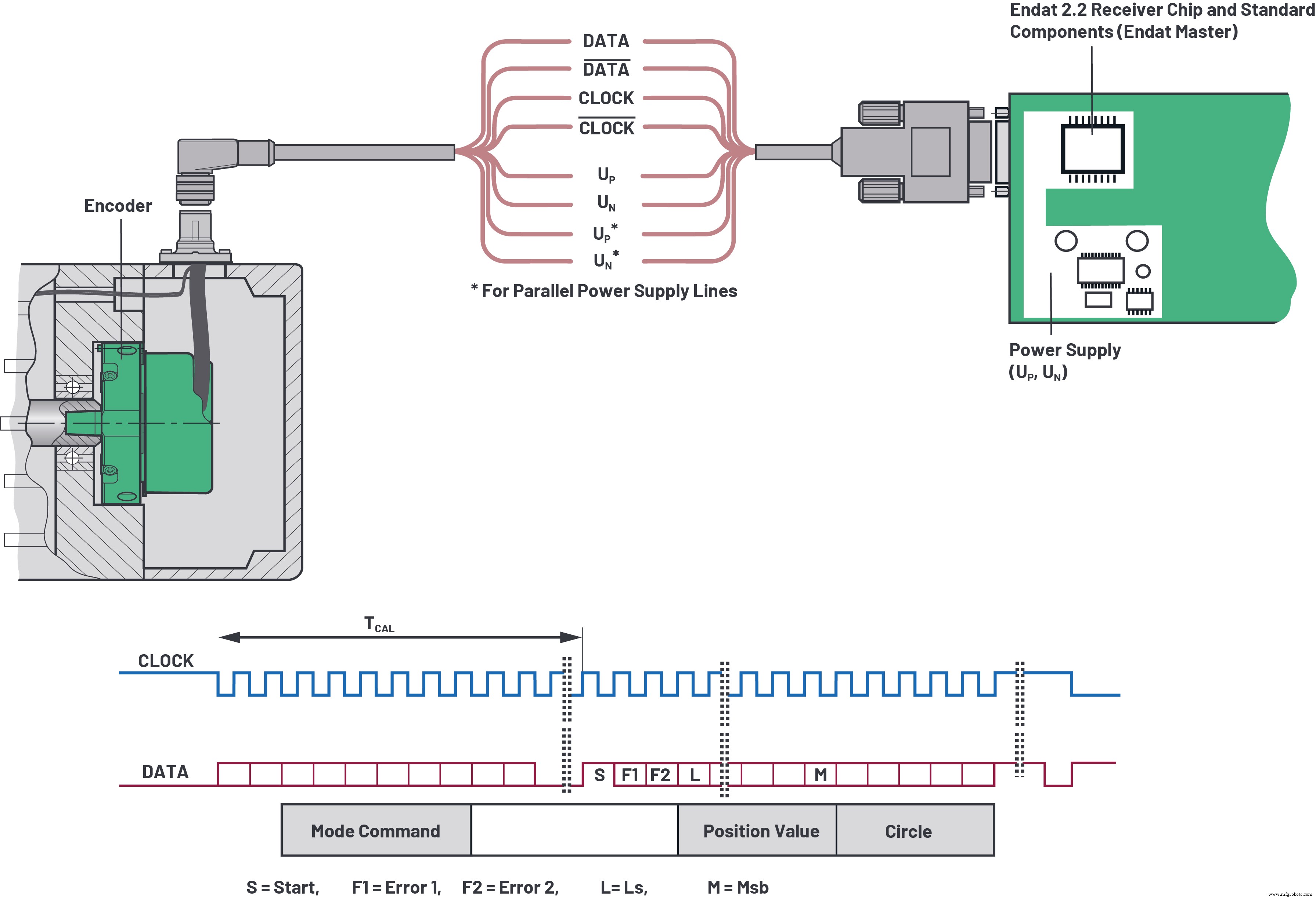
Untuk setiap paket yang ditransfer menggunakan protokol encoder EnDat 2.2, data ditransmisikan dalam sinkronisasi dengan tepi jam yang turun. Gambar 7 mengilustrasikan bahwa bit awal memulai transmisi data dari encoder kembali ke pengontrol master, setelah perhitungan awal posisi absolut (TCAL). Bit error berikutnya (F1, F2) menunjukkan saat kegagalan fungsi encoder dapat mengakibatkan nilai posisi yang salah. Encoder kemudian mentransmisikan nilai posisi absolut, dimulai dengan LS, dengan data berikut. Integritas sinyal jam dan data sangat penting untuk posisi yang berhasil dan pensinyalan kesalahan melalui kabel yang panjang, dengan EnDat 2.2 menetapkan jitter maksimum 10%. EnDat 2.2 menetapkan operasi maksimum pada clock rate 16 MHz lebih dari 20 m kabel. Gambar 4 menunjukkan bahwa persyaratan ini dapat dipenuhi hanya dengan 5% clock jitter, dan Gambar 6 menunjukkan bahwa persyaratan jitter untuk transmisi data terpenuhi, sedangkan transceiver RS-485 standar tidak. Hal ini penting karena kinerja pengaturan waktu yang unggul melalui kabel memastikan bahwa perancang sistem memiliki informasi yang diperlukan untuk mengaktifkan desain yang berhasil dirancang untuk memenuhi spesifikasi EnDat 2.2.
klik untuk gambar lebih besar Gambar 7. Lapisan fisik dan protokol EnDat 2.2 dengan sinkronisasi clock/data (diagram yang diadaptasi dari EnDat 2.2). (Sumber:Perangkat Analog)
Keandalan yang Lebih Baik dibandingkan Kabel yang Lebih Panjang
Standar TIA-485-A/EIA-485-A RS-485
3
memerlukan driver RS-485 yang sesuai untuk menghasilkan amplitudo tegangan diferensial, VOD, setidaknya 1,5 V ke dalam jaringan yang terisi penuh. 1,5 VOD ini memungkinkan atenuasi tegangan dc 1,3 V pada panjang kabel yang panjang, dengan penerima RS-485 yang ditentukan untuk beroperasi dengan setidaknya 200 mV tegangan diferensial input. Dengan transceiver yang dirancang untuk menghasilkan VOD minimal 2,1 V saat diberi daya pada 5 V, perancang dapat melampaui persyaratan spesifikasi RS-485.
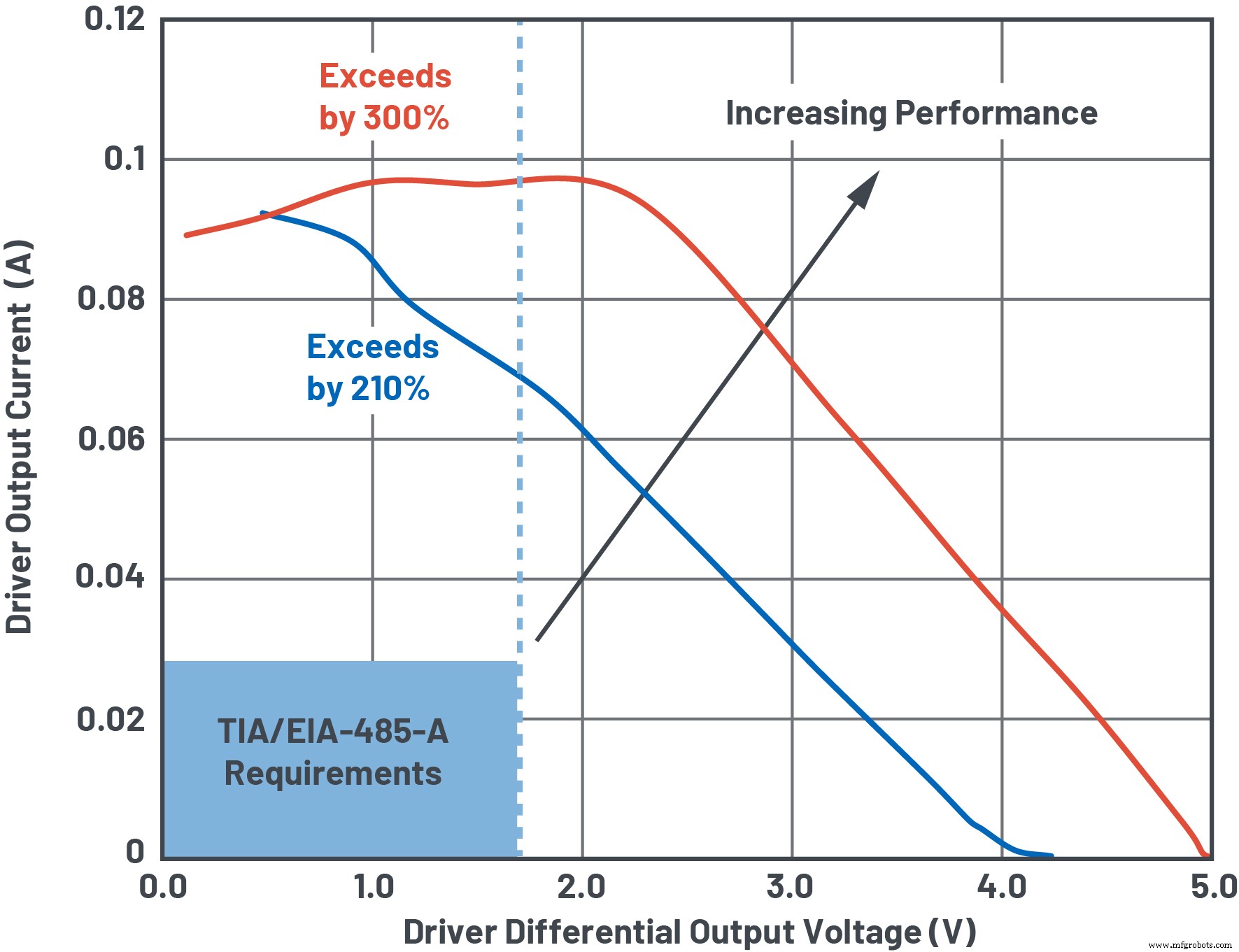
Jaringan RS-485 yang terisi penuh setara dengan beban diferensial 54 , yang mensimulasikan bus terminasi ganda dari dua resistor 120 dengan 750 lebih lanjut yang mewakili 32 perangkat terhubung dari 1 unit beban, atau 12 kΩ. ADM3065E memiliki arsitektur keluaran eksklusif untuk memaksimalkan VOD sekaligus memenuhi rentang tegangan mode umum yang diperlukan, melampaui persyaratan TIA-485-A/EIA-485-A. Gambar 8 mengilustrasikan bagaimana transceiver melebihi persyaratan penggerak standar RS-485 sebesar>210% saat diberi daya dari rel suplai 3,3 V, atau>300% saat diberi daya dari rel suplai 5 V. Hal ini memungkinkan sistem untuk berkomunikasi lebih jauh, dengan node yang lebih jauh dan dengan margin noise yang lebih banyak, daripada transceiver RS-485 biasa.
klik untuk gambar lebih besar Gambar 8. ADM3065E melebihi persyaratan hard disk RS-485 di berbagai rentang suplai yang luas. (Sumber:Perangkat Analog)
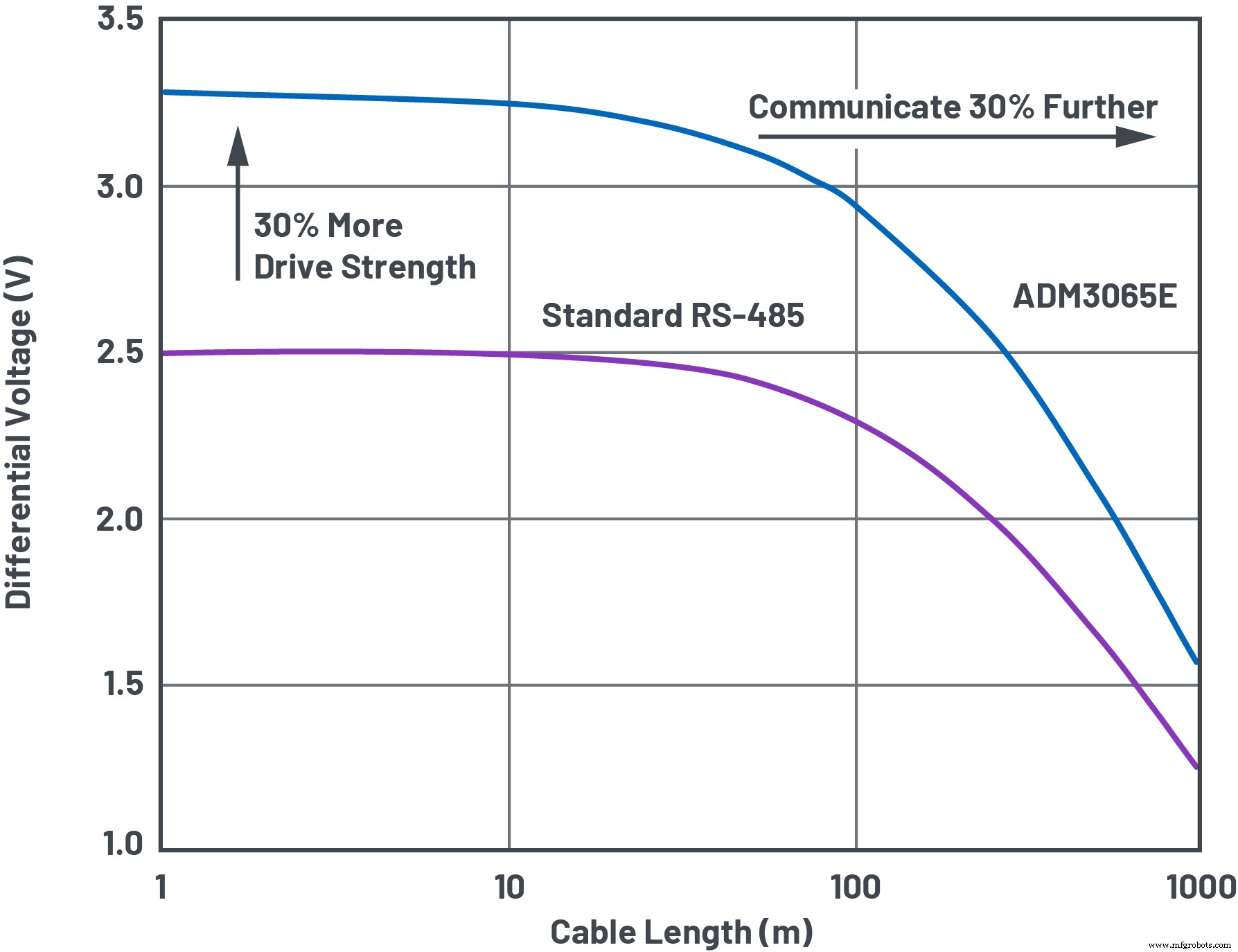
Gambar 9 lebih lanjut mengilustrasikan hal ini dalam aplikasi tipikal kabel lebih dari 1000 m. Saat berkomunikasi melalui kabel AWG 24 standar, transceiver yang disempurnakan 30% lebih baik daripada transceiver RS-485 standar—dengan margin noise 30% lebih besar pada node penerima, atau peningkatan 30% panjang kabel maksimum pada kecepatan data rendah. Performa ini sangat cocok untuk aplikasi infrastruktur nirkabel, di mana kabel RS-485 memanjang lebih dari beberapa ratus meter.
klik untuk gambar lebih besar Gambar 9. ADM3065E memberikan sinyal diferensial yang unggul untuk jarak yang sangat jauh. (Sumber:Perangkat Analog)
Perlindungan EMC dan Kekebalan Suara
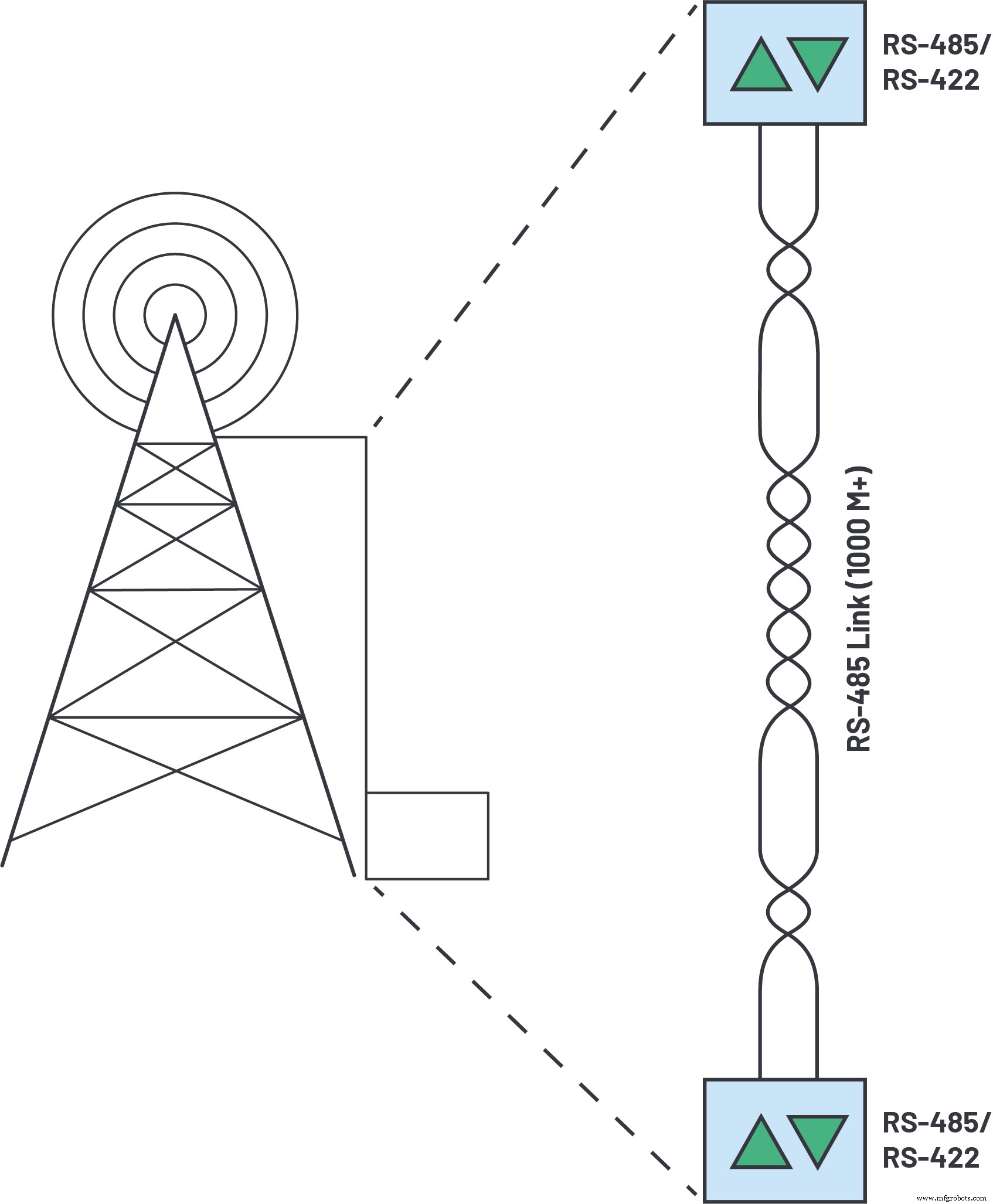
Pensinyalan RS-485 seimbang, diferensial, dan secara inheren kebal kebisingan. Noise sistem berpasangan secara merata ke setiap kabel dalam kabel twisted pair RS-485. Kabel pasangan terpilin menyebabkan arus kebisingan yang diinduksi mengalir dalam arah yang berlawanan, dan medan elektromagnetik yang digabungkan ke bus RS-485 saling membatalkan. Ini mengurangi kerentanan elektromagnetik sistem. Selain itu, kekuatan penggerak yang lebih besar memungkinkan rasio signal-to-noise (SNR) yang lebih besar dalam komunikasi. Melalui kabel yang panjang, seperti ratusan meter antara permukaan tanah dan antena pada stasiun pangkalan nirkabel, memiliki SNR yang ditingkatkan, serta integritas sinyal yang sangat baik, memastikan kontrol kemiringan/posisi antena yang akurat dan andal.
klik untuk gambar lebih besar Gambar 10. Panjang kabel infrastruktur nirkabel dapat mencapai ratusan meter. (Sumber:Perangkat Analog)
Seperti disebutkan pada Gambar 1, perlindungan EMC diperlukan untuk transceiver RS-485 yang terhubung langsung ke dunia luar melalui konektor dan kabel yang berdekatan. Misalnya, ESD pada konektor RS-485 yang terbuka dan kabel untuk encoder ke penggerak motor merupakan bahaya sistem yang umum. Standar IEC 61800-3 tingkat sistem yang berkaitan dengan persyaratan kekebalan EMC untuk kecepatan yang dapat disesuaikan, sistem penggerak daya listrik memerlukan minimum ±4 kV kontak/±8 kV udara perlindungan IEC 61000-4-2 ESD. Transceiver yang disempurnakan seperti ADM3065E melebihi persyaratan ini dengan perlindungan ±12 kV kontak/±12 kV udara IEC 61000-4-2 ESD.
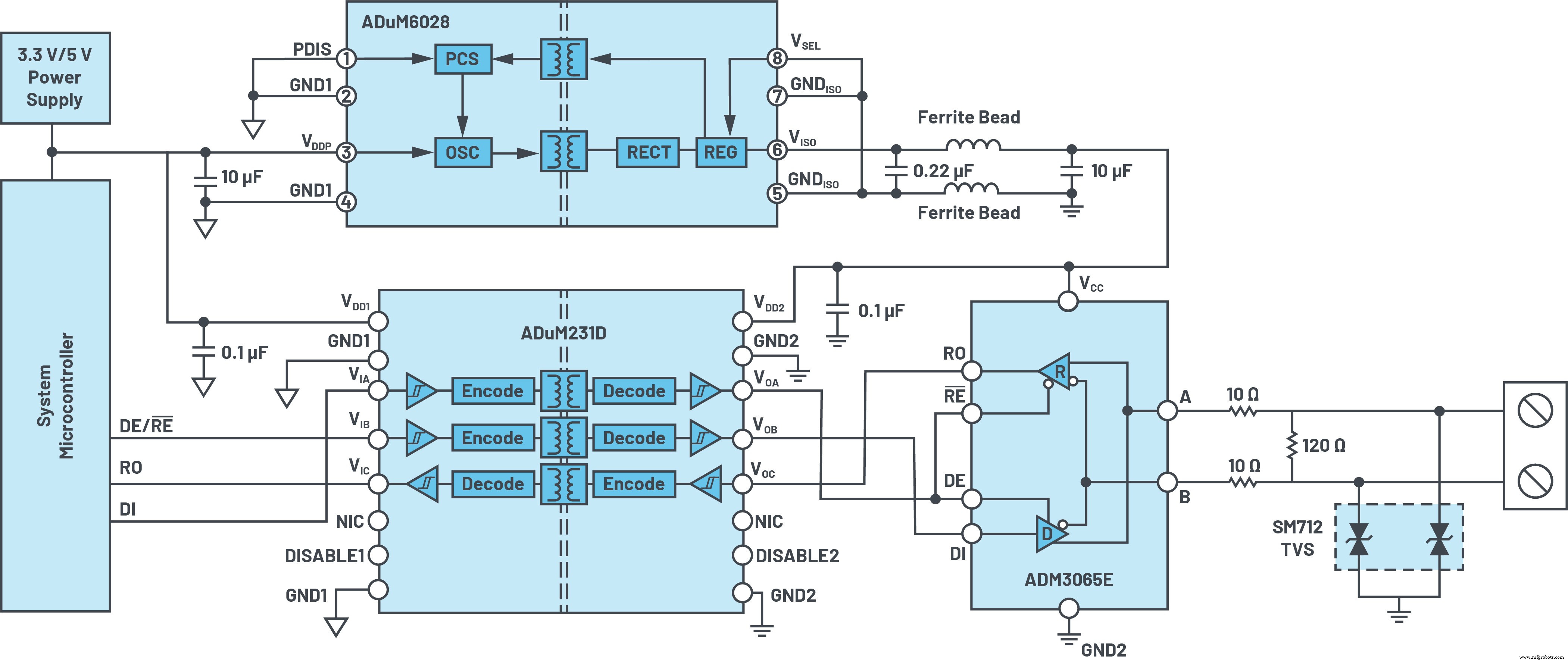
klik untuk gambar lebih besar Gambar 11. Lengkapi solusi RS-485 sinyal dan daya 25 Mbps yang terisolasi dengan ESD, EFT, dan perlindungan lonjakan arus. (Sumber:Perangkat Analog)
Untuk aplikasi infrastruktur nirkabel, perlindungan EMC yang ditingkatkan diperlukan untuk melindungi dari peristiwa surja petir yang merusak. Menambahkan TVS SM712 dan dua resistor koordinasi 10 ke input transceiver memberikan perlindungan EMC yang ditingkatkan—dengan perlindungan ESD hingga ±30 kV 61000-4-2 dan perlindungan lonjakan arus ±1 kV IEC 61000-4-5.
Untuk meningkatkan kekebalan kebisingan untuk kontrol motor yang keras secara elektrik, otomatisasi proses, dan aplikasi infrastruktur nirkabel, seseorang dapat menambahkan isolasi galvanik. Isolasi galvanik, dengan insulasi yang diperkuat dan tegangan ketahanan transien 5 kV rms, dapat ditambahkan ke ADM3065E menggunakan i Perangkat Analog Penghubung
®
dan iso Kekuatan
®
teknologi. ADuM231D menyediakan tiga saluran yang diperlukan dari isolasi sinyal 5 kV rms, dengan kinerja pengaturan waktu yang presisi memungkinkan operasi yang kuat dengan kecepatan hingga 25 Mbps. Konverter dc-ke-dc terisolasi ADuM6028 menyediakan daya terisolasi yang diperlukan dengan peringkat ketahanan 5 kV rms. Dua manik-manik ferit digunakan untuk memenuhi standar kepatuhan EMC dengan mudah seperti EN 55022 Kelas B/CISPR 22, menghasilkan solusi dc-ke-dc terisolasi yang ringkas dalam faktor bentuk 6 mm × 7,5 mm.
Transceiver RS-485 generasi berikutnya mengungguli standar industri, memungkinkan kemungkinan berkomunikasi lebih jauh dan lebih cepat dibandingkan dengan perangkat RS-485 standar. Pada tingkat jitter 10% yang ditentukan dalam EnDat 2.2
5
, sistem dapat beroperasi pada kecepatan clock 16 MHz melalui kabel maksimum 20 m, dengan standar RS-485 yang berjuang untuk memenuhi persyaratan ini. Melebihi persyaratan mengemudi bus RS-485 hingga 300% memberikan keandalan yang lebih baik dan lebih banyak margin kebisingan melalui kabel yang lebih panjang. Kekebalan suara dapat ditingkatkan dengan menambahkan i Isolasi coupler, termasuk isolator sinyal ADuM231D, dan solusi daya terisolasi faktor bentuk terkecil di industri, ADuM6028.
Referensi
1
“Jumlah Node PROFINET dan PROFIBUS Mencapai 87 Juta di 2018.” Grup Profibus, Mei 2019.
2
Konal Watterson. “Panduan Implementasi Sirkuit LVDS dan M-LVDS.” Analog Devices, Inc., Maret 2013.
3
“TIA/EIA-485-A, Karakteristik Listrik Generator dan Penerima untuk Digunakan dalam Sistem Multipoint Digital Seimbang.” IHS Markit Inc., Maret 1998.
4
“TIA/EIA-568-B.2, Standar Pengkabelan Telekomunikasi Gedung Komersial—Bagian 2:Komponen Kabel Berpasangan Berputar Seimbang.” Asosiasi Industri Telekomunikasi, Mei 2001.
5
“EnDat 2.2—Antarmuka Dua Arah untuk Encoder Posisi.” Heidenhain, September 2017.