Teknologi waktu penerbangan menjanjikan peningkatan akurasi
Analog Devices (ADI) dan Microsoft telah bekerja sama untuk menghasilkan solusi pencitraan 3D time-of-flight (ToF) dengan tujuan memberikan akurasi yang lebih baik terlepas dari kondisi pemandangan. ADI akan memanfaatkan teknologi Azure Kinect 3D ToF Microsoft dan menambahkan IC teknis dan keahlian sistemnya untuk menciptakan solusi yang lebih mudah diadopsi. Tujuannya adalah untuk menjangkau khalayak luas di sektor-sektor seperti Industri 4.0, otomotif, game, augmented reality, serta fotografi komputasi dan videografi.
Analis pasar industri memperkirakan pertumbuhan yang kuat untuk sistem pencitraan 3D yang digunakan di lingkungan yang menantang, dan di mana aplikasi mutakhir seperti robot kolaborasi manusia, pemetaan ruangan, dan sistem manajemen inventaris diperlukan untuk menghidupkan Industri 4.0. Aplikasi ToF juga diperlukan untuk menciptakan lingkungan mengemudi otomotif yang lebih aman dengan deteksi tingkat hunian dan kemampuan pemantauan pengemudi.
Dalam sebuah wawancara dengan EE Times, Tony Zarola, direktur senior pencitraan dan interpretasi yang disempurnakan dan Carlos Calvo, manajer pemasaran strategis di Analog Devices, telah menyoroti dasar-dasar kolaborasi ini . Zarola berkata, “ Microsoft telah menjadi tolok ukur kinerja 3D ToF di seluruh produsen sensor gambar dan menyediakan ADI dengan teknologi piksel inti yang merupakan dasar dari sensor dan solusi yang sedang dibangun ADI. Selama beberapa dekade, mereka telah mengembangkan keahlian yang diperlukan untuk pengambilan data terbaik dan algoritme revolusioner yang mereka jalankan di Intelligent Edge atau di Intelligent Cloud. Kami berharap dapat menggabungkan kemampuan terbaik Microsoft dan ADI dalam silikon, sistem, perangkat lunak, dan optik.”
Desain ToF 3D
Pengenalan gerak tubuh adalah kemampuan suatu alat untuk mengidentifikasi rangkaian gerakan tubuh manusia. Teknologi elektronik didasarkan pada bantuan kamera dan IC untuk identifikasi dan pemindaian adegan dalam profil 2D atau 3D. Teknik time-of-flight terdiri dari mengirimkan sinar laser ke target dan menganalisis pantulan sinyal.
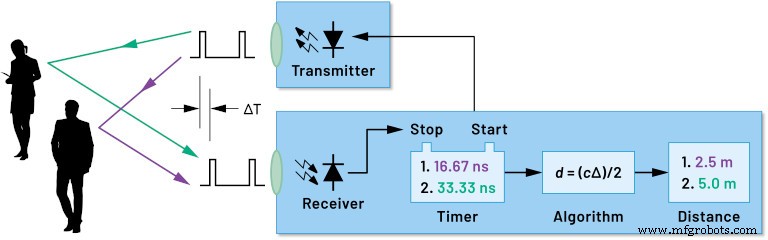
3D time-of-flight, atau 3D ToF, adalah jenis LIDAR (deteksi dan jangkauan cahaya) tanpa pemindai yang menggunakan pulsa optik berdaya tinggi dalam nanodetik untuk menangkap informasi kedalaman (biasanya jarak pendek) dari suatu pemandangan. Berbagai solusi IC, dengan bantuan algoritme perangkat lunak pengenalan gerakan, membuat peta kedalaman gambar yang diterima, merespons gerakan tubuh secara real-time. Keuntungan utama dari teknologi pengenalan gerakan adalah tidak diperlukan kontak fisik antara individu dan sistem kontrol.
Kamera ToF mengukur jarak dengan menyinari objek melalui sinar laser termodulasi dan sensor sensitif panjang gelombang laser untuk menangkap cahaya yang dipantulkan. Sensor mengukur waktu tunda antara saat cahaya dipancarkan, dan saat cahaya yang dipantulkan diterima oleh kamera. Ada beberapa metode untuk mengukur waktu tunda, dua di antaranya telah menjadi umum:metode gelombang kontinu (CW) dan metode pulsa. Sebagian besar sensor ToF adalah CW dan menggunakan sensor CMOS.
Ada banyak faktor pengganggu yang membuat pengukuran time-of-flight (ToF) menjadi sulit:cahaya sekitar yang mengganggu, efek multipath yang disebabkan oleh cahaya yang memantul dari objek dalam pemandangan yang merusak jarak sebenarnya, efek suhu, ambiguitas jangkauan. “Tantangannya berskala dari pengembangan silikon hingga pembuatan sistem lengkap yang bekerja sesuai dengan jumlah teoritis bagian-bagiannya,” kata Calvo. “Tidak mungkin untuk melihat setiap komponen secara terpisah. Misalnya, kamera ToF dengan sensor terbaik tetapi dilengkapi dengan lensa yang tidak dioptimalkan akan memiliki kinerja sistem yang buruk secara keseluruhan.”
“Di permukaan, kamera ToF memiliki kesamaan dengan kamera RGB. Satu perbedaan utama adalah bahwa tergantung pada aplikasinya, kualitas gambar kamera RGB dinilai dengan tingkat subjektivitas; aplikasi lain hanya diaktifkan melalui pasca-pemrosesan lanjutan. Kamera ToF mengukur kuantitas fisik objektif (jarak) di mana pengguna, tergantung pada aplikasinya, dapat mengandalkan keakuratan gambar secara signifikan. Beberapa ketidaksempurnaan optik pada kamera RGB seperti suar lensa dapat menghasilkan artefak yang terkadang dianggap artistik (misalnya suar sinar matahari). Dalam sistem ToF, suar lensa, jika tidak diminimalkan secara drastis, dapat melumpuhkan kinerja seluruh sistem dengan adanya pantulan kuat dari objek, Calvo menambahkan”
Sensor CMOS yang digunakan untuk waktu penerbangan terdiri dari pemancar dan penerima; ini memungkinkan penghitungan jarak objek pada tingkat piksel tunggal dengan kinerja mendekati 160 fps.
“Pada tingkat silikon, kita harus mempertimbangkan elemen kunci dari rantai sinyal:driver laser, sensor gambar ToF dengan pembacaan terintegrasi dan akhirnya mesin komputasi kedalaman. Tantangannya dimulai dengan desain piksel dengan responsivitas tinggi dan kontras modulasi tinggi pada sensor gambar itu sendiri dan diakhiri dengan pembentukan awan titik 3D yang dapat diinterpretasikan oleh lapisan aplikasi berikutnya.
“Selain komponen, tantangan utama berasal dari desain dan produksi kamera kedalaman karena desain opto-mekanis, kalibrasi, desain elektrik, dan implementasi perangkat lunak semuanya memakan waktu dan menantang. Analog Devices (ADI) menghadapi tantangan ini bagi pelanggan kami untuk memudahkan proses desain mereka,” kata Calvo.
Gambar 1. Blok diagram ToF. (sumber:ADI)
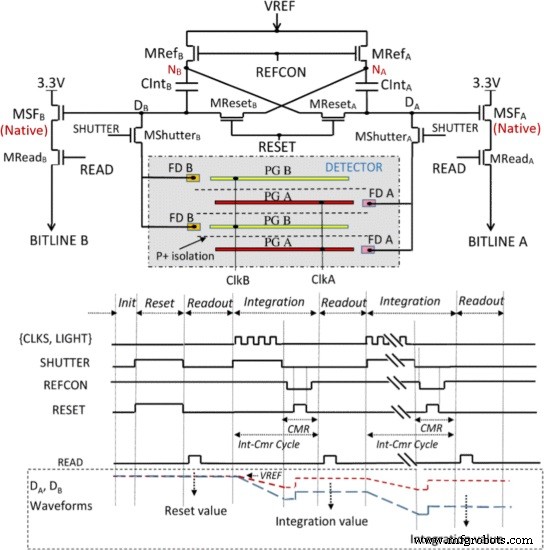
Piksel mengumpulkan cahaya dari bagian pemandangan yang berbeda, dan rekombinasinya akan membentuk gambar yang direkonstruksi. Semua piksel sensor dikendalikan oleh korelasi antara blok demodulasi dan modulasi. Setiap piksel dapat didekati dengan model yang ditunjukkan pada Gambar 2.
Arus diarahkan ke Node-A (Da) atau Node-B (Db) selama waktu integrasi dengan mengaktifkan sinyal kontrol yang relevan. Pembacaan berlangsung dengan demodulasi dihentikan, sehingga sistem dapat membaca seluruh urutan bit. ClkA dan ClkB dimodulasi 180 derajat keluar fase untuk waktu tInt1 pada frekuensi modulasi yang dipilih. Fase cahaya yang diterima mengenai jam ClkA &CLkB menentukan sinyal DA dan DB. Pada akhir integrasi, ClkA &ClkB dimatikan, dan fase membaca dilakukan dengan mengambil sampel sinyal terintegrasi (BitlineAInt1-BitlineBInt1).
Konversi foton menjadi arus listrik diatur oleh proses kuantum dengan distribusi Poisson. Parameter yang memberi kita gambaran tentang kebaikan sistem adalah efisiensi kuantum, yaitu rasio antara jumlah elektron yang dihasilkan, dan foton yang mengaktifkan piksel yang sesuai. Jumlah elektron tergantung baik pada cahaya termodulasi aktual dan cahaya sekitar yang sesuai dengan efek kebisingan. Parameter yang harus dipilih saat merancang sistem Time-of-Flight adalah FoV (Field of View). FoV harus dipilih dengan tepat sesuai dengan persyaratan cakupan tempat kejadian.
Gambar 2. Rangkaian listrik dan waktu untuk sebuah piksel. (Sumber:https://ieeexplore.ieee.org/document/6964815 )
Untuk mencapai efisiensi tinggi pada frekuensi tinggi, chip dapat dibuat dengan menggunakan proses CMOS daya rendah sinyal campuran 0,13 m dengan sedikit modifikasi untuk mendukung operasi Time-of-Flight yang efisien.
ADI dan Microsoft
Kolaborasi antara Microsoft dan ADI bertujuan untuk meningkatkan teknologi ToF:ADI sedang merancang seri baru sensor gambar 3D ToF yang akan memberikan akurasi kurang dari satu milimeter dan akan kompatibel dengan ekosistem raksasa Redmond, berdasarkan kedalaman Microsoft, Intelligent Cloud dan platform Intelligent Edge.
“Kami sangat yakin bahwa kolaborasi ini akan berdampak pada semua industri besar – konsumen, industri, perawatan kesehatan, dan otomotif. Sampai saat ini, teknologi yang dikembangkan oleh Microsoft belum tersedia secara luas untuk aplikasi komersial berskala. Kami percaya solusi ADI, yang didukung oleh teknologi imager Microsoft, akan menjadi pengubah permainan secara keseluruhan,” kata Zarola.
Ada aplikasi yang jelas dari sistem keamanan untuk pengenalan wajah yang ditingkatkan bersama dengan langkah-langkah keamanan yang maju untuk otomatisasi pabrik yang lebih efisien. Industri 4.0 akan ditransformasikan dengan robot kolaboratif yang bekerja dengan aman bersama manusia tanpa dipagari di area “tanpa manusia” dan pengoptimalan lebih lanjut dalam logistik akan dimungkinkan oleh akurasi ToF untuk dimensi kotak dan palet.
Zarola menambahkan, “Deteksi hunian yang lebih canggih akan mengarah pada peningkatan efisiensi energi, sistem keselamatan, dan interaksi manusia-mesin. Dari rumah hingga mobil, kolaborasi ToF kami dengan Microsoft akan memberikan pengalaman bermain game baru kemampuan untuk menempatkan dan berinteraksi dengan objek virtual di dunia nyata dan mengubah cara kami berinteraksi dengan mobil kami dan meningkatkan keamanan dengan memantau pengemudi dan penumpang. Kasus penggunaan potensial untuk teknologi ToF sangat luas dan berkembang, sehingga aplikasi utama hari ini diharapkan akan digantikan oleh ide-ide baru besok.”
Zarola dan Calvo telah menyatakan bagaimana pelanggan mereka menginginkan resolusi kedalaman milimeter dan resolusi spasial yang baik pada rentang suhu yang luas. Mencapai kinerja semacam ini memerlukan tingkat sinkronisasi waktu yang ekstrim yang dicapai baik di tingkat perangkat keras maupun perangkat lunak. “Ketidaksejajaran waktu 10 ps antara sinyal yang mengendalikan laser dan piksel dalam sensor menghasilkan kesalahan 1,5 mm dalam perkiraan jarak akhir. Jika itu tidak cukup sulit, tambahkan kebutuhan untuk menjaga akurasi sistem Time-of-Flight pada rentang suhu yang luas yang memerlukan pemrosesan lanjutan dan algoritma kalibrasi yang perlu dirancang bersama,” kata Calvo.
Kritik khusus terhadap sistem ToF adalah frekuensi modulasi di mana mereka dapat beroperasi dan di mana ADI paling terkonsentrasi. Sebagian besar sumber kesalahan estimasi kedalaman cenderung "dibagi" oleh frekuensi modulasi. “Kami bertujuan untuk meningkatkan frekuensi modulasi rata-rata dari sistem ToF yang memungkinkan pengukuran dengan noise kedalaman yang lebih rendah serta mengurangi efek merugikan dari multipath atau noise bidikan cahaya sekitar,” kata Zarola.
Zarola menambahkan, “ADI juga ingin memecahkan tantangan utama yang membuat perancangan dan produksi kamera kedalaman memakan waktu dan sulit. Kami melakukan penyelarasan mekanis, desain optik, kalibrasi, desain elektrik, dan implementasi perangkat lunak bersama dengan hambatan tradisional dalam pengambilan gambar.”
Kombinasi teknologi 3D Time-of-Flight (ToF) Microsoft yang digunakan dalam perangkat realitas campuran HoloLens dan kit pengembangan Azure Kinect, dengan solusi khusus ADI, akan memungkinkan generasi baru aplikasi berperforma tinggi untuk diimplementasikan dan dapat diskalakan, sambil mengoptimalkan waktu-ke-pasar.
>> Artikel ini awalnya diterbitkan pada situs saudara kami, EE Times.