Akselerometer adalah sensor luar biasa yang memungkinkan penginderaan akselerasi statis dan dinamis yang bervariasi seperti orientasi terhadap gravitasi hingga gerakan halus jembatan yang mulai gagal. Sensor ini berkisar dari perangkat kelas ponsel yang mengubah orientasi layar saat Anda memiringkannya hingga perangkat kelas taktis yang dikontrol ekspor yang membantu menavigasi kendaraan militer atau pesawat ruang angkasa.[1] Namun, seperti kebanyakan sensor, sensor bekerja dengan baik di lab atau benchtop adalah satu hal. Ini adalah hal lain untuk mendapatkan kinerja pada tingkat sistem dalam menghadapi tekanan lingkungan dan suhu yang liar dan tidak terkendali. Saat akselerometer, seperti manusia, mengalami tekanan yang belum pernah terjadi sebelumnya dalam masa hidupnya, sistem dapat bereaksi dan gagal karena efek dari tekanan ini.
Sistem sensor kemiringan dengan akurasi tinggi umumnya dikalibrasi untuk mencapai akurasi kemiringan yang lebih baik dari 1°. Memanfaatkan kebisingan ultra rendah terkemuka di pasar dan akselerometer yang sangat stabil, seperti ADXL354 atau ADXL355, seseorang dapat mencapai akurasi kemiringan 0,005 ° dengan kalibrasi yang tepat dari sumber kesalahan yang dapat diamati.[2] Namun, tingkat akurasi ini hanya dapat dicapai jika tekanan dikurangi dengan benar. Misalnya, tekanan tekan/tarik pada sensor dapat menyebabkan offset sebesar 20 mg, sehingga ketidakakuratan kemiringan lebih dari 1°.
Seri artikel ini mengulas metrik kinerja sistem penginderaan sudut/miring presisi tinggi menggunakan akselerometer. Kami akan mulai dalam artikel ini dengan pemahaman tentang desain sensor itu sendiri pada tingkat mikroskopis untuk lebih memahami efek tegangan dan regangan hingga ke tingkat mikron. Dalam artikel terpisah, kami kemudian akan membahas beberapa hasil mengejutkan yang dapat terjadi jika pendekatan desain mekanis dan fisik holistik tidak diikuti. Terakhir, kami akan menutup seri ini dengan langkah nyata yang dapat dilakukan desainer untuk memaksimalkan kinerja dalam aplikasi yang paling menuntut.
Dasar-Dasar Desain Sensor
Akselerometer berbasis MEMS dapat menjalankan keseluruhan dalam harga dan kinerja dari produk konsumen hingga penginderaan militer. Saat ini, akselerometer kebisingan rendah berkinerja terbaik memungkinkan aplikasi seperti penginderaan kemiringan presisi, pencitraan seismik, dan banyak aplikasi baru dalam robotika dan stabilisasi platform. Kemampuan penting untuk aplikasi penginderaan kemiringan/sudut presisi tinggi mencakup kebisingan, offset, pengulangan, dan offset terkait suhu yang sangat baik, serta efek orde kedua seperti rektifikasi getaran dan sensitivitas sumbu silang.
Untuk lebih memahami pertimbangan desain untuk akselerometer MEMS presisi tinggi 3-sumbu agar bekerja secara optimal, ada baiknya untuk terlebih dahulu meninjau struktur internal sensor semacam itu, yang akan memperjelas alasan ketiga sumbu menghasilkan respons yang berbeda terhadap parameter lingkungan (misalnya , tegangan di luar bidang). Dalam banyak kasus, tegangan di luar bidang ini disebabkan oleh gradien suhu melintasi sumbu z sensor.
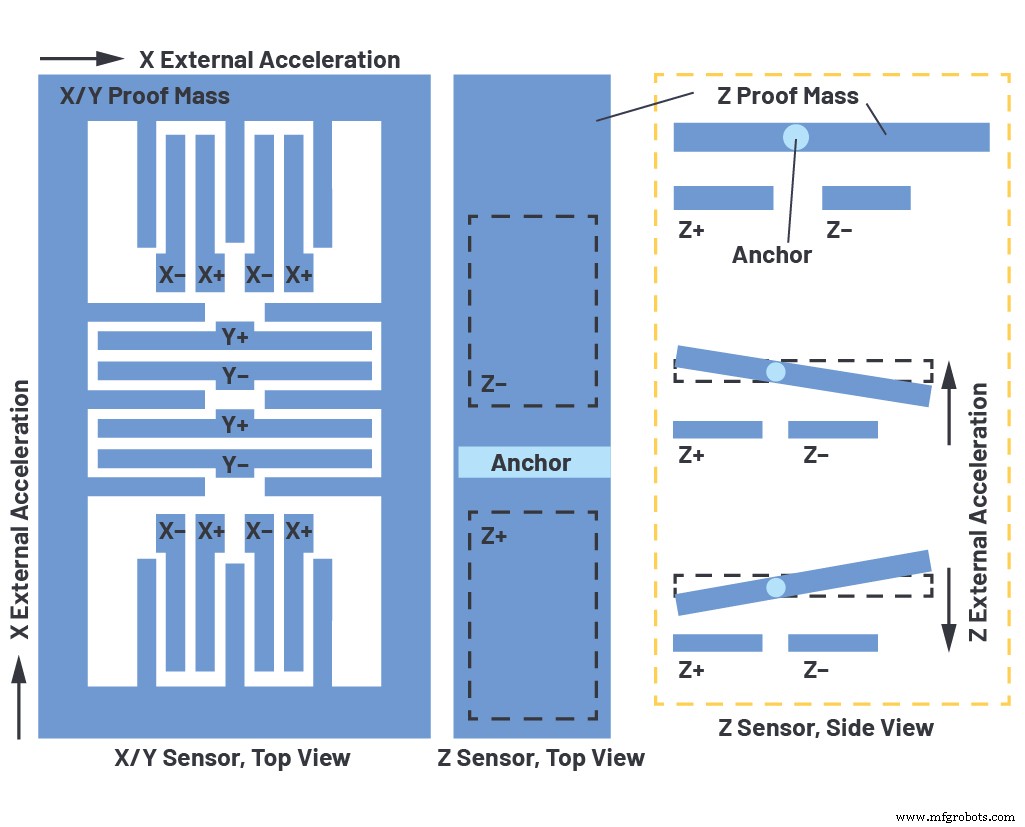
Akselerometer yang ditunjukkan pada Gambar 1 terdiri dari sistem massa pegas, mirip dengan banyak akselerometer MEMS lainnya. Massa bergerak sebagai respons terhadap percepatan eksternal (percepatan statis seperti gravitasi atau percepatan dinamis seperti perubahan kecepatan) dan perpindahan fisiknya dirasakan oleh mekanisme transduksi.
klik untuk gambar ukuran penuh Gambar 1. Arsitektur sensor dari akselerometer MEMS presisi tinggi 3-sumbu, khususnya ADXL355 dari Perangkat Analog. Untuk sensor X/Y, saat massa bukti bergerak, kapasitansi antara jari-jari yang ditambatkan dan jari-jari yang menempel pada massa bukti berubah. Ketidakseimbangan massa pada sensor sumbu z memungkinkan penginderaan luar bidang percepatan sumbu z. (Sumber:Perangkat Analog)
Mekanisme transduksi yang paling umum dalam sensor MEMS adalah kapasitif, piezoresistif, piezoelektrik, atau magnetik. Akselerometer seperti ADXL355 menggunakan mekanisme transduksi kapasitif, di mana gerakan dirasakan oleh perubahan kapasitansi yang, melalui rangkaian pembacaan, diubah menjadi tegangan atau keluaran arus. Meskipun ADXL355 menggunakan mekanisme transduksi kapasitif untuk ketiga sensor sumbu pada cetakan silikon, sensor X/Y dan sensor Z memiliki dua arsitektur penginderaan kapasitif yang berbeda secara fundamental. Sensor X/Y didasarkan pada jari diferensial dalam bidang, sedangkan sensor Z adalah sensor kapasitif pelat paralel di luar bidang, seperti yang ditunjukkan pada Gambar 1.
Jika ada tegangan tekan atau tarik pada sensor, die MEMS melengkung. Karena massa bukti ditangguhkan di atas substrat dengan pegas, itu tidak melengkung bersama-sama dengan substrat, dan, oleh karena itu, akan ada perubahan dalam celah antara massa dan substrat. Untuk sensor X/Y, celah tidak dalam arah sensitivitas kapasitif, karena perpindahan dalam bidang memiliki dampak terbesar pada perubahan kapasitansi untuk jari. Hal ini disebabkan oleh efek kompensasi dari medan listrik pinggiran. Namun, untuk sensor Z, celah antara substrat dan massa bukti memang merupakan celah indra. Oleh karena itu, ini berdampak langsung pada sensor Z karena secara efektif mengubah celah penginderaan untuk sensor Z. Efek memperburuk lainnya adalah bahwa sensor Z terletak di tengah dadu, di mana lengkungan dimaksimalkan untuk setiap tekanan yang diberikan pada dadu.
Selain tekanan fisik, gradien suhu melintasi sensor sumbu z adalah umum karena asimetri perpindahan panas pada sumbu z di sebagian besar aplikasi. Dalam aplikasi yang khas, sensor disolder ke papan sirkuit tercetak (PCB) dan seluruh sistem berada dalam satu paket. Perpindahan panas X dan Y didominasi oleh konduksi melalui sambungan solder di sekeliling kemasan dan ke PCB, yang simetris. Dalam arah-z, bagaimanapun, perpindahan panas adalah melalui konduksi di bagian bawah karena solder dan konveksi di atas mati sebagai panas bergerak melalui udara dan keluar dari paket. Karena ketidakcocokan ini, akan ada gradien suhu diferensial residual melintasi sumbu z. Seperti halnya tegangan tekan/tarik fisik, ini akan menghasilkan offset pada sumbu z yang tidak diinduksi oleh percepatan.
Dalam artikel berikutnya dalam seri ini, kami meninjau cara memperoleh set data awal yang baik untuk menetapkan kinerja dasar dan memvalidasi tingkat kebisingan seperti apa yang diharapkan dalam analisis data berikutnya.
Referensi
^[1] Chris Murphy. “Memilih Akselerometer MEM yang Paling Cocok untuk Aplikasi Anda—Bagian 1.” Dialog Analog, Vol. 51, No. 4, Oktober 2017.
^[2] Chris Murphy. “Akselerometer Kemiringan Mengukur Suhu dan Adanya Getaran.” Dialog Analog, Agustus 2017.