Mengoptimalkan sistem penginderaan suhu RTD:Desain
Dalam artikel kedua ini tentang pengoptimalan sistem penginderaan detektor suhu resistansi (RTD) , kami mengeksplorasi optimasi sistem RTD, pemilihan komponen eksternal, dan bagaimana mengevaluasi sistem RTD akhir.
Pada artikel pertama dalam seri tiga bagian tentang RTD ini, kami membahas tantangan pengukuran suhu, jenis RTD, konfigurasi yang berbeda, dan rangkaian konfigurasi RTD. Pada artikel kedua, kami menguraikan tiga konfigurasi RTD yang berbeda:2-kawat, 3-kawat, dan 4-kawat. Dalam artikel terakhir dalam seri ini, kita akan mengeksplorasi optimasi sistem RTD, pemilihan komponen eksternal, dan cara mengevaluasi sistem RTD akhir.
Pengoptimalan Sistem RTD
Melihat masalah perancang sistem, ada berbagai tantangan yang terlibat dalam merancang dan mengoptimalkan solusi aplikasi RTD. Tantangan pertama adalah pemilihan sensor dan diagram koneksi yang telah dibahas pada bagian sebelumnya. Tantangan kedua adalah konfigurasi pengukuran, yang mencakup konfigurasi ADC, pengaturan arus eksitasi, pengaturan penguatan, dan pemilihan komponen eksternal sambil memastikan optimalisasi sistem dan pengoperasian dalam spesifikasi ADC. Dan terakhir, masalah yang paling kritis adalah bagaimana mencapai kinerja target dan apa saja sumber kesalahan yang berkontribusi pada kesalahan sistem secara keseluruhan.
Untungnya, ada RTD_Configurator_and_Error_Budget_Calculator baru yang menawarkan solusi praktis dalam merancang dan mengoptimalkan sistem pengukuran RTD mulai dari konsep hingga pembuatan prototipe.
Alat:
Memungkinkan pemahaman tentang konfigurasi, pengkabelan, dan diagram sirkuit yang benar
Membantu memahami berbagai sumber kesalahan dan memungkinkan pengoptimalan desain
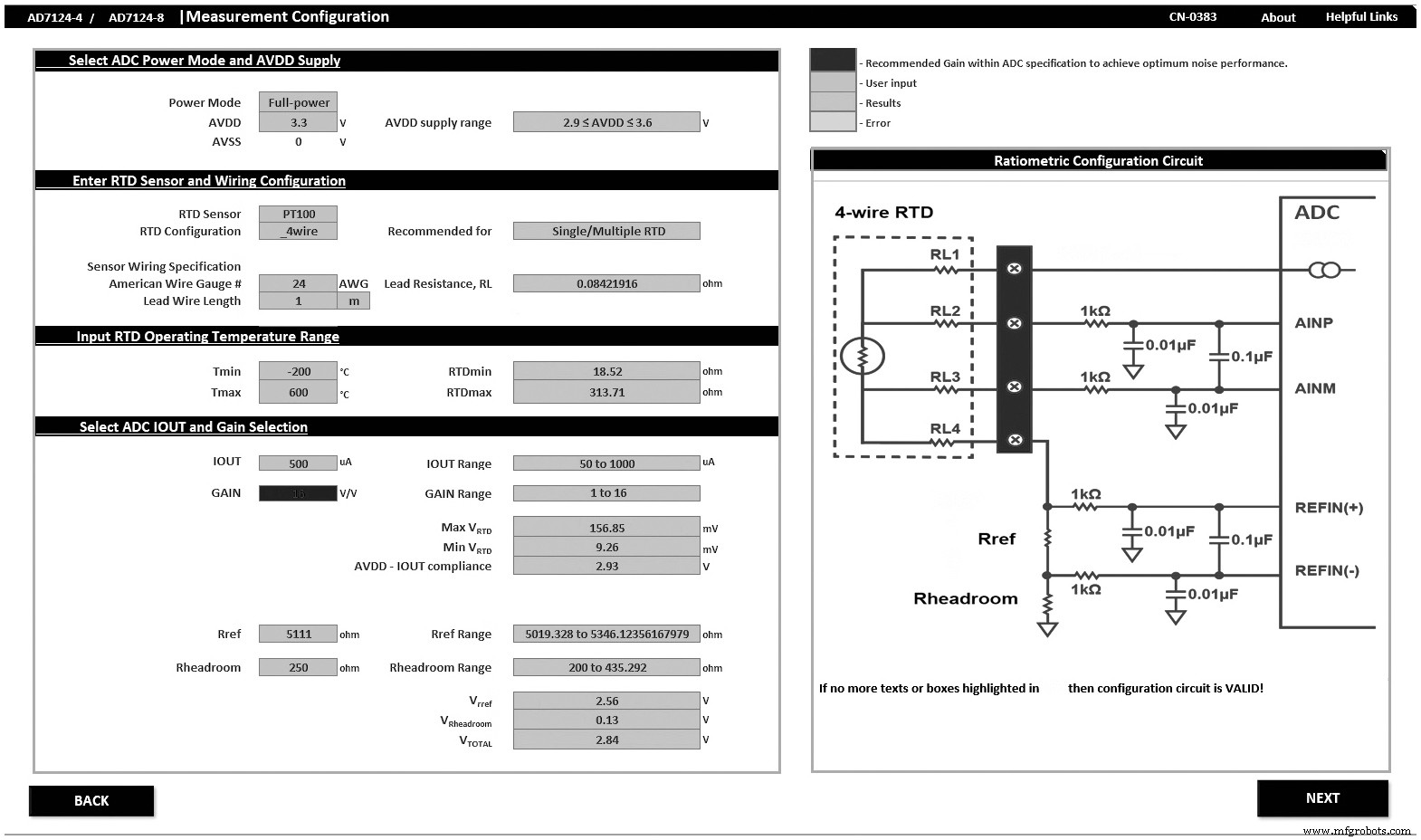
Alat ini dirancang di sekitar AD7124-4/AD7124-8. Ini memungkinkan pelanggan untuk menyesuaikan pengaturan seperti arus eksitasi, penguatan, dan komponen eksternal (Gambar 1). Ini menunjukkan kondisi di luar batas untuk memastikan bahwa solusi akhir berada dalam spesifikasi ADC.
klik untuk gambar ukuran penuh Gambar 1. Konfigurasi RTD. (Sumber:Perangkat Analog)
Pemilihan Arus Eksitasi, Penguatan, dan Komponen Eksternal
Idealnya, kita cenderung memilih besaran arus eksitasi yang lebih tinggi untuk menghasilkan tegangan keluaran yang jauh lebih tinggi dan memaksimalkan jangkauan masukan ADC. Namun, karena sensor bersifat resistif, perancang juga harus memastikan disipasi daya atau efek pemanasan sendiri dari nilai arus eksitasi yang besar tidak akan mempengaruhi hasil pengukuran. Perancang sistem dapat memilih arus eksitasi tinggi. Namun, untuk meminimalkan pemanasan sendiri, arus eksitasi perlu dimatikan di antara pengukuran. Perancang perlu mempertimbangkan implikasi waktu untuk sistem. Pendekatan alternatif adalah memilih arus eksitasi yang lebih rendah yang meminimalkan pemanasan sendiri. Pengaturan waktu sekarang diminimalkan, tetapi perancang perlu menentukan apakah kinerja sistem terpengaruh. Semua skenario dapat diuji melalui RTD_Configurator_and_Error_Budget_Calculator. Alat ini memungkinkan pengguna untuk menyeimbangkan pemilihan arus eksitasi, penguatan, dan komponen eksternal untuk memastikan bahwa tegangan input analog dioptimalkan bersama dengan penyetelan penguatan dan kecepatan ADC untuk memberikan resolusi yang lebih baik dan kinerja sistem yang lebih baik, yang berarti kebisingan yang lebih rendah dan kesalahan offset yang lebih rendah.
Untuk memahami profil filter yang dihasilkan atau untuk mendapatkan pemahaman yang lebih mendalam tentang waktu konversi, alat online VirtualEval menyediakan detail ini.
Input ADC dan input referensi dari ADC sigma-delta keduanya terus menerus diambil sampelnya oleh ujung depan kapasitor yang diaktifkan. Untuk sistem RTD yang sedang dibahas, input referensi juga digerakkan oleh resistor referensi eksternal. Filter RC eksternal direkomendasikan pada input analog dari ADC sigma-delta untuk tujuan antialiasing. Untuk tujuan EMC, perancang sistem dapat menggunakan nilai R dan C yang besar baik pada input analog maupun input referensi. Nilai RC yang besar dapat menyebabkan kesalahan penguatan dalam pengukuran karena sirkuit ujung-depan tidak memiliki waktu yang cukup untuk menetap di antara saat pengambilan sampel. Buffer input analog dan referensi mencegah kesalahan gain ini dan memungkinkan nilai R dan C yang tidak terbatas untuk digunakan.
Untuk AD7124-4/AD7124-8, saat menggunakan penguatan internal lebih besar dari 1, buffer input analog diaktifkan secara otomatis dan karena PGA ditempatkan di depan buffer input, karena PGA adalah rel ke rel, input analog juga rel ke rel. Namun, dalam kasus buffer referensi atau saat menggunakan ADC pada penguatan 1 dengan buffer input analog diaktifkan, perlu untuk memastikan bahwa ruang kepala yang diperlukan untuk operasi yang benar terpenuhi.
Sinyal dari Pt100 adalah level rendah. Mereka berada di urutan ratusan mV. Untuk kinerja yang optimal, ADC dengan rentang dinamis yang lebar dapat digunakan. Atau, tahap penguatan dapat digunakan untuk memperkuat sinyal sebelum diterapkan ke ADC. Dukungan AD7124-4/AD7124-8 memperoleh keuntungan dari 1 hingga 128, sehingga memungkinkan desain yang dioptimalkan untuk berbagai arus eksitasi. Beberapa opsi penguatan PGA yang diizinkan memungkinkan perancang untuk menukar nilai arus eksitasi vs. penguatan, komponen eksternal, dan kinerja. Alat konfigurator RTD menunjukkan apakah nilai arus eksitasi baru dapat digunakan dengan sensor RTD yang dipilih. Nilai yang sesuai untuk resistor referensi presisi dan resistor ruang kepala referensi juga disarankan. Perhatikan bahwa alat ini memastikan ADC digunakan dalam spesifikasi—alat ini menampilkan kemungkinan keuntungan yang akan mendukung konfigurasi. Arus eksitasi AD7124 memiliki kepatuhan keluaran; yaitu, tegangan pada pin yang menyediakan arus eksitasi memerlukan ruang kepala dari AVDD. Alat ini juga akan memastikan bahwa spesifikasi kepatuhan ini terpenuhi.
Alat RTD memungkinkan perancang sistem untuk menjamin sistem yang berada dalam batas operasi ADC dan sensor RTD. Keakuratan komponen eksternal seperti resistor referensi dan kontribusinya terhadap kesalahan sistem akan dibahas nanti.
Opsi Pemfilteran (Penolakan Analog dan Digital 50 Hz/60 Hz)
Seperti dibahas sebelumnya, filter antialiasing direkomendasikan dengan konverter sigma-delta. Karena filter tertanam adalah digital, respons frekuensi direfleksikan di sekitar frekuensi pengambilan sampel. Penyaringan antialiasing diperlukan untuk mengurangi gangguan pada frekuensi modulator dan pada kelipatan frekuensi ini. Karena konverter sigma-delta mengambil sampel input analog secara berlebihan, desain filter antialiasing sangat disederhanakan dan hanya diperlukan filter RC kutub tunggal.
Ketika sistem akhir digunakan di lapangan, menangani kebisingan atau interferensi dari lingkungan di mana sistem beroperasi bisa sangat menantang, terutama di ruang aplikasi seperti otomasi industri, instrumentasi, kontrol proses, atau kontrol daya, di mana menjadi toleran. kebisingan dan pada saat yang sama tidak berisik untuk komponen tetangga Anda diperlukan. Kebisingan, transien, atau sumber interferensi lainnya dapat memengaruhi akurasi dan resolusi sistem. Gangguan juga dapat terjadi ketika sistem diberi daya dari catu daya. Frekuensi catu daya utama dihasilkan pada 50 Hz dan kelipatannya di Eropa, dan 60 Hz dan kelipatannya di AS. Jadi, ketika merancang sistem RTD, sirkuit penyaringan dengan penolakan 50 Hz/60 Hz harus dipertimbangkan. Banyak perancang sistem ingin merancang sistem universal yang menolak 50 Hz dan 60 Hz secara bersamaan.
Sebagian besar ADC bandwidth yang lebih rendah, termasuk AD7124-4/AD7124-8, menawarkan berbagai pilihan penyaringan digital yang dapat diprogram untuk mengatur takik pada 50 Hz/60 Hz. Opsi filter yang dipilih memiliki efek pada kecepatan data keluaran, waktu penyelesaian, dan penolakan 50 Hz dan 60 Hz. Ketika beberapa saluran diaktifkan, waktu penyelesaian diperlukan untuk menghasilkan konversi setiap kali saluran dialihkan; dengan demikian, memilih jenis filter dengan waktu pengendapan yang lebih lama (yaitu, sinc4 atau sinc3) akan menurunkan tingkat throughput keseluruhan. Dalam hal ini, postfilter atau filter FIR berguna untuk memberikan penolakan 50 Hz/60 Hz simultan yang wajar pada waktu pengendapan yang lebih rendah dan dengan demikian meningkatkan laju throughput.
Pertimbangan Daya
Konsumsi saat ini atau alokasi anggaran daya sistem sangat bergantung pada aplikasi akhir. AD7124-4/AD7124-8 berisi tiga mode daya yang memungkinkan pertukaran antara kinerja, kecepatan, dan daya. Untuk aplikasi portabel atau jarak jauh, komponen dan konfigurasi daya rendah harus digunakan, dan untuk beberapa aplikasi otomasi industri, sistem lengkap diberi daya dari loop 4 mA hingga 20 mA sehingga anggaran saat ini hanya maksimum 4 mA yang diperbolehkan. Untuk jenis aplikasi ini, perangkat dapat diprogram dalam mode daya sedang atau rendah. Kecepatannya jauh lebih rendah, tetapi ADC masih memberikan kinerja tinggi. Jika aplikasi adalah kontrol proses, yang ditenagai dari catu utama, konsumsi arus yang jauh lebih tinggi diperbolehkan, sehingga perangkat dapat diprogram dalam mode daya penuh dan sistem ini dapat mencapai kecepatan data keluaran yang jauh lebih tinggi dan peningkatan kinerja.
Sumber Kesalahan dan Opsi Kalibrasi
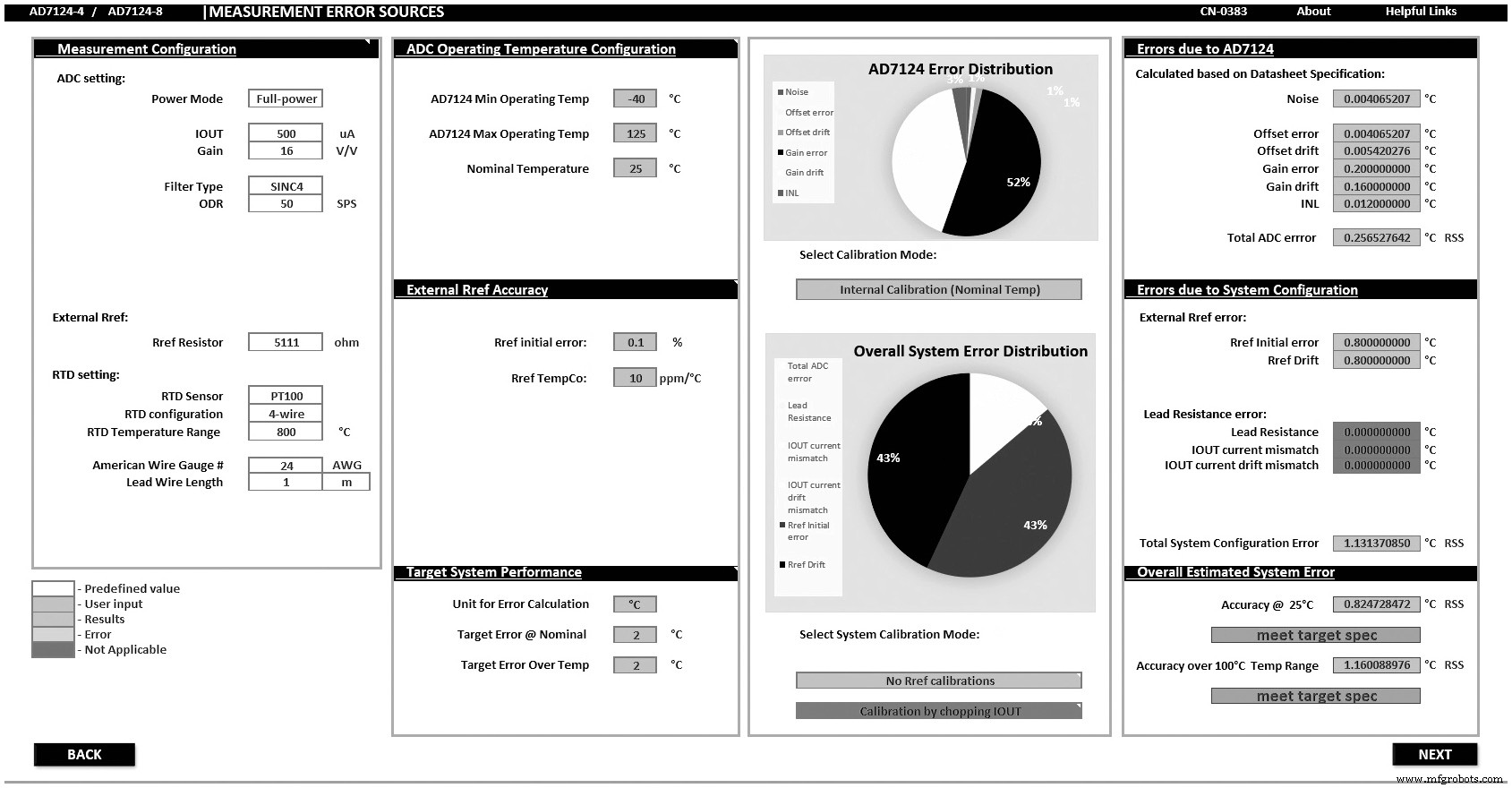
Setelah mengetahui konfigurasi sistem yang diperlukan, langkah selanjutnya adalah memperkirakan kesalahan yang terkait dengan ADC dan kesalahan sistem. Ini membantu perancang sistem untuk memahami apakah ujung depan dan konfigurasi ADC akan memenuhi akurasi dan kinerja target secara keseluruhan. RTD_Configurator_and_Error_Budget_Calculator memungkinkan pengguna untuk memodifikasi konfigurasi sistem untuk kinerja yang optimal. Misalnya, Gambar 2 menunjukkan ringkasan semua kesalahan. Diagram lingkaran kesalahan sistem menunjukkan bahwa akurasi awal resistor referensi eksternal dan koefisien suhunya adalah kontributor kesalahan utama untuk kesalahan sistem secara keseluruhan. Oleh karena itu, penting untuk mempertimbangkan penggunaan resistor referensi eksternal dengan akurasi yang lebih tinggi dan koefisien suhu yang lebih baik.
klik untuk gambar ukuran penuh Gambar 2. Kalkulator sumber kesalahan RTD. (Sumber:Perangkat Analog)
Kesalahan karena ADC bukanlah penyumbang kesalahan yang paling signifikan terhadap kesalahan sistem secara keseluruhan. Namun, kontribusi kesalahan dari ADC dapat dikurangi lebih lanjut dengan menggunakan mode kalibrasi internal AD7124-4/AD7124-8. Kalibrasi internal direkomendasikan pada saat penyalaan atau inisialisasi perangkat lunak untuk menghilangkan kesalahan penguatan dan offset ADC. Harap dicatat bahwa kalibrasi ini tidak akan menghapus kesalahan yang dibuat oleh sirkuit eksternal. Namun, ADC juga dapat mendukung kalibrasi sistem sehingga kesalahan offset dan penguatan sistem dapat diminimalkan, tetapi ini dapat menambah biaya tambahan dan mungkin tidak diperlukan untuk sebagian besar aplikasi.
Deteksi Kesalahan
Untuk lingkungan yang keras atau untuk aplikasi yang mengutamakan keselamatan, diagnostik menjadi bagian dari persyaratan industri. Diagnostik yang disematkan di AD7124-4/AD7124-8 mengurangi kebutuhan komponen eksternal untuk menerapkan diagnostik, sehingga menghasilkan solusi penghematan waktu dan biaya yang lebih kecil dan disederhanakan.
Diagnostik meliputi:
Memeriksa level tegangan pada pin analog untuk memastikannya berada dalam rentang operasi yang ditentukan
Pemeriksaan redundansi siklik (CRC) pada bus antarmuka periferal serial (SPI)
CRC pada peta memori
Pemeriksaan rantai sinyal
Diagnostik ini mengarah pada solusi yang lebih kuat. Mode kegagalan, efek, dan analisis diagnostik (FMEDA) dari aplikasi RTD 3-kawat tipikal telah menunjukkan fraksi kegagalan aman (SFF) lebih besar dari 90% menurut IEC 61508.
Evaluasi Sistem RTD
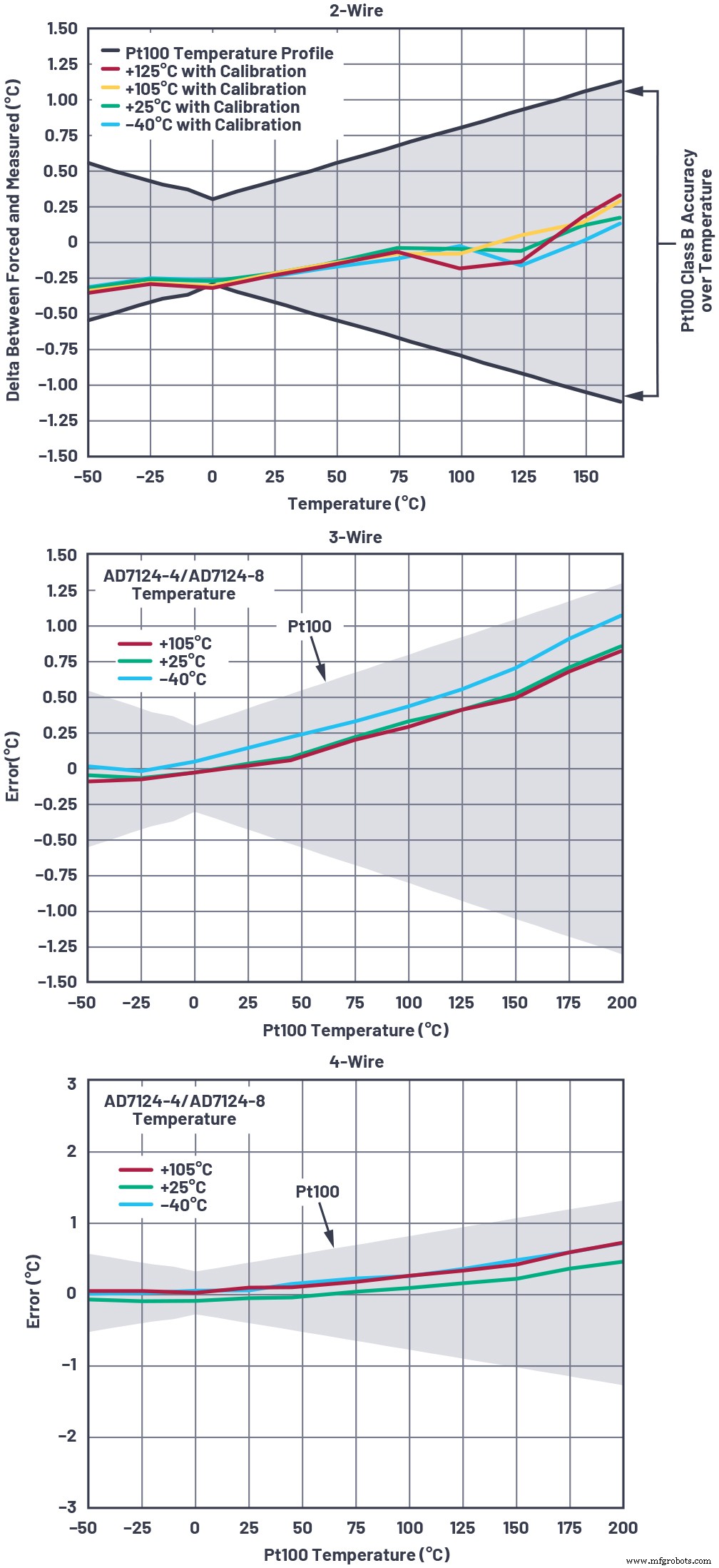
Gambar 3 menunjukkan beberapa data terukur dari catatan sirkuit CN-0383. Data terukur ini ditangkap dengan papan evaluasi AD7124-4/AD7124-8, yang mencakup mode demo untuk RTD 2-, 3-, dan 4-kawat, dan menghitung nilai derajat Celcius yang sesuai. Hasil penelitian menunjukkan bahwa implementasi RTD 2-kawat memberikan error yang mendekati batas bawah dari batas error, sedangkan implementasi RTD 3-kawat atau 4-kawat memiliki keseluruhan error yang masih dalam batas yang diperbolehkan. Kesalahan yang lebih tinggi dalam pengukuran 2-kawat disebabkan oleh kesalahan resistansi timbal yang dijelaskan sebelumnya.
klik untuk gambar ukuran penuh Gambar 3. Postfilter pengukuran akurasi suhu RTD 2-/3-/4-kawat dalam mode daya rendah pada 25 SPS. (Sumber:Perangkat Analog)
Contoh-contoh ini menunjukkan bahwa mengikuti pedoman RTD di atas akan menghasilkan akurasi tinggi, desain kinerja tinggi bila digunakan bersama dengan ADC sigma-delta bandwidth rendah ADI seperti AD7124-4/AD7124-8. Catatan sirkuit (CN-0383) juga akan berfungsi sebagai desain referensi yang membantu perancang sistem untuk membuat prototipe dengan cepat. Papan evaluasi memungkinkan pengguna untuk mengevaluasi kinerja sistem di mana setiap mode demo konfigurasi sampel dapat digunakan. Ke depannya, firmware untuk konfigurasi RTD yang berbeda dapat dengan mudah dikembangkan menggunakan kode sampel yang dihasilkan ADI yang tersedia dari halaman produk AD7124-4/AD7124-8.
ADC, yang menggunakan arsitektur sigma-delta seperti dari AD7124-4/AD7124-8, cocok untuk aplikasi pengukuran RTD karena menangani masalah seperti penolakan 50 Hz/60 Hz, serta rentang mode umum yang luas pada analog dan mungkin input referensi. Mereka juga sangat terintegrasi, berisi semua fungsi yang diperlukan untuk desain sistem RTD. Selain itu, mereka menyediakan fitur yang disempurnakan seperti kemampuan kalibrasi dan diagnostik tertanam. Tingkat integrasi ini, bersama dengan jaminan sistem atau ekosistem yang lengkap akan menyederhanakan keseluruhan desain sistem, biaya, dan siklus desain dari konsep hingga pembuatan prototipe.
Untuk memudahkan perjalanan perancang sistem, alat RTD_Configurator_and_Error_Budget_Calculator bersama dengan alat online VirtualEval, perangkat keras dan perangkat lunak papan evaluasi, dan CN-0383 dapat digunakan untuk mengatasi berbagai tantangan, seperti masalah konektivitas dan anggaran kesalahan keseluruhan, dan membawa pengguna ke tingkat desain berikutnya.
Kesimpulan
Artikel ini telah menunjukkan bahwa merancang sistem pengukuran suhu RTD adalah proses multilangkah yang menantang. Ini membutuhkan pembuatan pilihan dalam hal konfigurasi sensor yang berbeda, pemilihan ADC, dan pengoptimalan dan bagaimana keputusan tersebut memengaruhi kinerja sistem secara keseluruhan. Alat ADI RTD_Configurator_and_Error_Budget_Calculator, bersama dengan alat online VirtualEval, perangkat keras dan lunak papan evaluasi, dan CN-0383 menyederhanakan proses dengan mengatasi masalah konektivitas dan anggaran kesalahan secara keseluruhan.
Jellenie Rodriguez adalah seorang insinyur aplikasi di Perangkat Analog dalam Grup Teknologi Konverter Presisi. Fokusnya adalah pada ADC sigma-delta presisi untuk pengukuran DC. Bergabung dengan ADI pada tahun 2012 dan lulus dari San Sebastian College-Recoletos de Cavite dengan gelar sarjana teknik elektronik pada tahun 2011. Dia dapat dihubungi di jellenie.rodriguez@analog.com.Mary McCarthy adalah seorang insinyur aplikasi di Analog Devices. Dia bergabung dengan ADI pada tahun 1991 dan bekerja di Linear and Precision Technology Applications Group di Cork, Irlandia, dengan fokus pada konverter presisi sigma-delta. Mary lulus dengan gelar sarjana teknik elektronik dan listrik dari University College Cork pada tahun 1991. Dia dapat dihubungi di mary.mccarthy@analog.com.
Konten Terkait:
Mengoptimalkan sistem penginderaan suhu RTD:Tantangan (Bagian 1 dalam seri ini)
Mengoptimalkan sistem sensor suhu RTD:Konfigurasi kabel (Bagian 2 dalam seri ini)
Menggunakan ADC delta-sigma dalam sistem multisensor presisi tinggi
Melakukan pengukuran presisi dengan sensor suhu silikon
Interface dengan sensor modern:Desain antarmuka menggunakan C++
Menangani akuisisi data suhu tinggi dan pengembangan platform pemrosesan
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tertanam.



 Jellenie Rodriguez adalah seorang insinyur aplikasi di Perangkat Analog dalam Grup Teknologi Konverter Presisi. Fokusnya adalah pada ADC sigma-delta presisi untuk pengukuran DC. Bergabung dengan ADI pada tahun 2012 dan lulus dari San Sebastian College-Recoletos de Cavite dengan gelar sarjana teknik elektronik pada tahun 2011. Dia dapat dihubungi di jellenie.rodriguez@analog.com.
Jellenie Rodriguez adalah seorang insinyur aplikasi di Perangkat Analog dalam Grup Teknologi Konverter Presisi. Fokusnya adalah pada ADC sigma-delta presisi untuk pengukuran DC. Bergabung dengan ADI pada tahun 2012 dan lulus dari San Sebastian College-Recoletos de Cavite dengan gelar sarjana teknik elektronik pada tahun 2011. Dia dapat dihubungi di jellenie.rodriguez@analog.com.  Mary McCarthy adalah seorang insinyur aplikasi di Analog Devices. Dia bergabung dengan ADI pada tahun 1991 dan bekerja di Linear and Precision Technology Applications Group di Cork, Irlandia, dengan fokus pada konverter presisi sigma-delta. Mary lulus dengan gelar sarjana teknik elektronik dan listrik dari University College Cork pada tahun 1991. Dia dapat dihubungi di mary.mccarthy@analog.com.
Mary McCarthy adalah seorang insinyur aplikasi di Analog Devices. Dia bergabung dengan ADI pada tahun 1991 dan bekerja di Linear and Precision Technology Applications Group di Cork, Irlandia, dengan fokus pada konverter presisi sigma-delta. Mary lulus dengan gelar sarjana teknik elektronik dan listrik dari University College Cork pada tahun 1991. Dia dapat dihubungi di mary.mccarthy@analog.com.