

pencetakan 3D

Manufaktur industri
Salah satu kemajuan besar di bidang teknik industri adalah pengembangan rekayasa balik proses. Ini terdiri dari penggalian informasi langsung dari sistem fisik dan menerjemahkannya ke dalam model digital.
Rekayasa terbalik memberikan banyak keuntungan saat memodelkan dan mensimulasikan sistem atau produk. Di satu sisi, ini memungkinkan informasi langsung diambil dari model, yang lebih andal dan berkualitas lebih tinggi, dan di sisi lain mempercepat dan mempersingkat waktu kerja. Ini memungkinkan sistem yang kompleks dimodelkan dengan lebih andal dan dalam waktu yang lebih singkat.
Salah satu bidang di mana rekayasa balik paling berhasil diterapkan adalah metrologi, dengan digitalisasi geometri kompleks.
Pemindaian 3D adalah proses mengubah permukaan fisik menjadi model digital. Ini terdiri dari mengekstraksi posisi relatif beberapa titik pada permukaan itu (awan titik) dan secara digital menginterpolasi permukaan yang memuatnya, sehingga merekonstruksi geometri bagian tersebut.
Parameter utama yang menentukan point cloud ini adalah resolusi dan akurasi. Resolusi diberikan oleh jarak minimum yang dapat diselesaikan antara dua titik dan akurasi dengan kesalahan dalam menentukan posisi sebenarnya dari setiap titik. Resolusi yang lebih tinggi akan memungkinkan detail yang lebih kecil ditangkap sementara akurasi yang tinggi akan memberikan model dengan dimensi yang lebih dekat dengan kenyataan dan karenanya toleransi yang lebih kecil.
Perangkat yang dirancang untuk tujuan ini dikenal sebagai pemindai 3D. Ada banyak jenis bergantung pada teknologinya, dan dapat diklasifikasikan ke dalam dua kelompok utama:kontak dan non-kontak.
Hubungi pemindai 3D mungkin yang paling tidak umum, meskipun merupakan beberapa yang paling akurat. Mereka terdiri dari lengan yang diartikulasikan, biasanya dengan 6 derajat kebebasan, dengan stylus di ujungnya. Operator melintasi permukaan dengan stylus sementara sensor merekam posisi pada frekuensi tertentu. Kerugian utama dari teknologi ini adalah mengharuskan operator untuk memindai seluruh permukaan dengan stilus, yang dapat menjadi proses yang sangat lambat. Di sisi lain, gesekan stylus pada permukaan dapat merusak permukaan, yang dapat menimbulkan masalah pada artefak arkeologi atau karya seni.

Pemindai non-kontak didasarkan pada teknologi optik dan terbagi dalam dua kategori:sistem pasif dan sistem aktif.
Sistem pasif terutama didasarkan pada penggalian informasi geometris suatu permukaan dari foto yang diambil dari dua sudut pandang yang ditentukan, suatu teknik yang dikenal sebagai stereoscopy dan didasarkan pada efek paralaks penglihatan manusia. Keuntungan utamanya adalah dapat memetakan permukaan besar dengan cepat dan murah, namunresolusi dan akurasinya sangat rendah. Selain itu, ini tidak memungkinkan pengukuran nyata ditangkap, sehingga memerlukan sistem pelengkap yang memungkinkan model untuk diskalakan ulang ke dimensi aslinya.
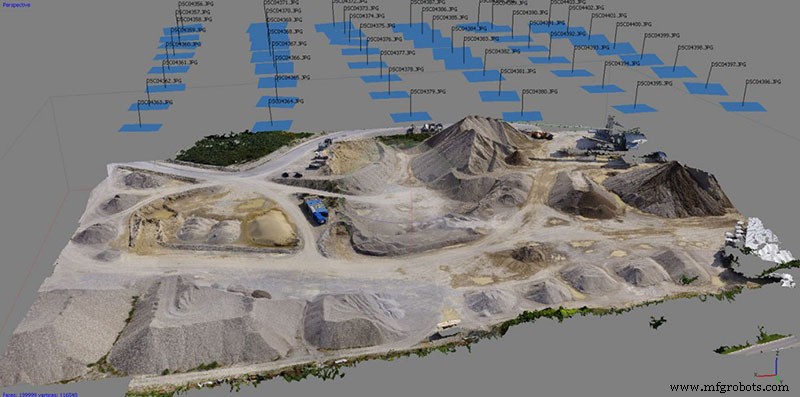
Pemindaian 3D teknologi pasif yang paling terkenal adalahfotogrametri, terutama digunakan dalam pemetaan topografi dan teknik sipil. Biasanya dilengkapi dengan data posisi satelit untuk menambahkan data dimensi yang akurat.
Terakhir, ada sistem pemindaian 3D non-kontak aktif. Ini adalah grup terbesar dan paling banyak digunakan dalam industri, seni, kedokteran, dan hiburan.
Jenis sistem ini didasarkan pada pengukuran sinyal yang dipancarkan di permukaan. Meskipun semua jenis sinyal yang mampu berinteraksi dengan permukaan dapat digunakan, seperti ultrasound, sistem yang paling umum adalah optik.
Ada beberapa teknologi dalam kategori ini, namun, yang paling umum adalah empat: pemindai 3D waktu penerbangan, pemindai 3D triangulasi, pemindai 3D perbedaan fase, dan pemindai 3D ringan terstruktur.
Pemindai 3D Time-of-flight (Tof) :Berdasarkan penghitungan jarak ke permukaan dengan mengukur waktu yang diperlukan pulsa sinar laser untuk bergerak ke dan dari permukaan. Ini menggabungkan jarak jauh dengan frekuensi perolehan poin yang tinggi. Ini terutama digunakan untuk memetakan struktur besar atau sebagai alat metrologi untuk menentukan deformasi pada elemen struktur . Saat ini penggunaan non-profesionalnya telah menjadi hal yang biasa berkat penerapannya di beberapa ponsel seperti iPhone berkat sensor lidarnya.
Triangulasi atau pemindai laser 3D: Mereka terdiri dari pemancar laser dan sensor susunan fotodioda, ditempatkan pada sudut tertentu. Ketika sinar laser dipantulkan pada permukaan yang akan dipetakan, sinar tersebut mengenai titik tertentu pada sensor, tergantung jarak ke permukaan. Hal ini memungkinkan untuk melakukan triangulasi posisi titik di mana sinar laser terjadi. Ini adalah salah satu sistem yang paling akurat, namun, ini tergantung pada sudut di mana laser datang pada permukaan, jadi membutuhkan jarak kerja yang sangat pendek. Sangat cocok untuk memetakan objek berukuran kecil hingga sedang dengan resolusi dan akurasi tinggi.
Pemindai perbedaan fase: Ini adalah solusi perantara dari dua solusi sebelumnya. Mereka terdiri dari pemancar laser termodulasi dan detektor, dan menentukan jarak ke objek dengan membandingkan fase cahaya yang dipancarkan dan diterima. Mereka memiliki jarak kerja yang baik dan akurasi sedang, menjadikannya cocok untuk memetakan objek besar dengan akurasi yang baik.
Pemindai cahaya terstruktur: Mungkin yang paling umum saat ini. T hey adalah pemindai 3D paling serbaguna karena menggabungkan resolusi yang sangat baik, akurasi tinggi, kecepatan akuisisi tinggi, dan biaya rendah. Mereka terdiri darikamera dengan lensa terkalibrasi dan proyektor yang memproyeksikan pola cahaya ke permukaan. Kamera menangkap gambar deformasi pola-pola ini di permukaan dan melalui algoritme pemrosesan yang rumit menghasilkan awan titik. Sistem ini memungkinkan diperolehnya ratusan poin dalam setiap pengambilan, sehingga memiliki kecepatan perolehan yang tinggi. Selain itu, bergantung pada lensa yang digunakan, dimungkinkan untuk menyesuaikan jarak kerja, presisi, dan resolusi. Mereka juga memiliki keuntungan bahwa banyak model, seperti dari Thor3D, dapat digunakan dengan tangan, tanpa memerlukan tripod. Kelemahan utama mereka adalah bahwa mereka peka terhadap kondisi cahaya sekitar dan bagian akhir, jadi pemindaian 3D harus dilakukan di bawah pencahayaan yang sesuai dan untuk permukaan yang mengkilap atau transparan mungkin perlu untuk menggunakan cat matt khusus.
Umumnya, Sistem pemindaian 3D tidak menangkap data berkelanjutan, tetapi posisi diskrit dari permukaan yang akan ditangkap. Ini dikenal sebagai awan titik. Awan titik yang diperoleh oleh pemindai 3D tidak dapat digunakan secara langsung, sehingga diperlukan beberapa tugas pascapemrosesan untuk mencapai replika digital.
Kualitas akhir model akan bergantung, selain memulai dari cloud titik kualitas, pada pemrosesan yang benar. Ini membutuhkan perangkat lunak dengan algoritme rekonstruksi yang baik dan beberapa pengetahuan tentang pemrosesan point cloud.
Pertama-tama, jika pemindaian 3D dilakukan dalam beberapa tangkapan, awan titik yang berbeda harus diselaraskan dan digabungkan untuk mencapai satu awan yang menutupi seluruh model. Keakuratan menyelaraskan awan titik akan sangat bergantung pada kemampuan pelacakan pemindai 3D. Pelacakan marker akan selalu menjadi yang termudah untuk disejajarkan, namun, ada kasus di mana penanda tidak dapat digunakan, seperti dalam kasus karya seni. Untuk kasus ini, beberapa pemindai, seperti Calibry atau Calibry Mini, menggabungkan beberapa opsi pelacakan, seperti pelacakan tekstur.
Selanjutnya, awan titik harus dibersihkan dengan membuang titik-titik yang tidak sesuai dengan permukaan, baik karena termasuk objek di lingkungan atau karena muncul karena kesalahan pada pemindai 3D. Pemindai 3D berkualitas bersama dengan proses pemindaian yang baik akan memberikan point cloud yang bersih dengan sedikit atau tanpa titik berlebih.
Setelah point cloud dibersihkan, mesh perlu direkonstruksi . Pemilihan parameter yang sesuai akan memberikan jaring yang akurat dan disesuaikan dengan benar.
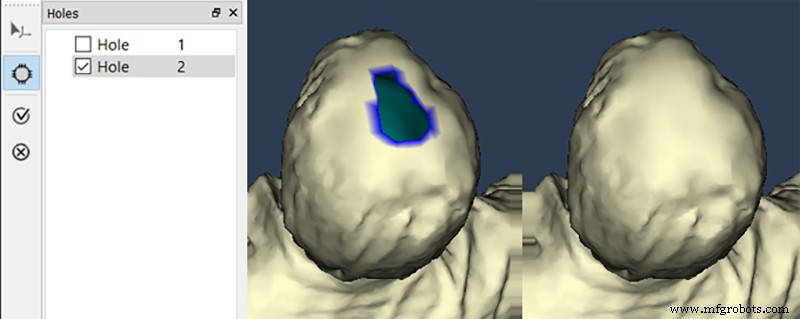
Setelah mengonversi point cloud menjadi poligon mesh, itu perlu diperiksa dan diperbaiki. Salah satu cacat yang paling umum biasanya adalah munculnya celah pada jaring karena data yang hilang selama pemindaian. Satu-satunya cara untuk memperbaiki cacat ini adalah dengan menerapkan tambalan dengan interpolasi. Kualitas algoritme interpolasi yang diimplementasikan dalam perangkat lunak akan memengaruhi kualitas rekonstruksi.
Terakhir, penting untuk mengoptimalkan mesh. Jenis pengoptimalan akan sangat bergantung pada aplikasi akhir. Jaringan dapat disederhanakan, mengorbankan resolusi dengan mengurangi ukuran file. Penyederhanaan mesh sering kali dapat membantu memperbaiki cacat kecil,mencapai geometri yang lebih sederhana dan lebih homogen . Di sisi lain, resolusi mesh dapat ditingkatkan dengan menginterpolasi elemen baru. Meningkatkan resolusi mesh tidak meningkatkan resolusi penangkapan , namun, ini dapat membantu untuk mendapatkan kesinambungan dan kehalusan yang lebih baik pada permukaan dengan kelengkungan.
Beberapa pemindai 3D, seperti yang didasarkan pada cahaya terstruktur, memungkinkan tekstur dan warna permukaan ditangkap secara bersamaan melalui foto. Ini memungkinkan langkah tambahan dalam pemrosesan dengan memungkinkan tekstur dipetakan ke mesh. Ini sangat menarik untuk aplikasi yang berkaitan dengan seni dan hiburan.
Ada banyak kemungkinan aplikasi untuk pemindai 3D di berbagai sektor industri. Dalam kedokteran dan ortopedi, misalnya, mereka dapat mereplikasi bagian tubuh pasien secara digital untuk mengembangkan ortosis yang disesuaikan. Di bidang hiburan, mereka banyak digunakan dalam film dan video game untuk membuat aktor kembar digital. Mereka semakin banyak digunakan dalam seni dan arkeologi untuk menghasilkan replika digital karya seni dan artefak sejarah untuk dipelajari oleh para ilmuwan di seluruh dunia. Di bidang teknik, mereka mempermudah pembuatan rencana bagian yang kompleks, mengurangi waktu kerja, dan mencapai model yang lebih akurat. Dalam inspeksi, mereka memudahkan untuk membandingkan geometri komponen dari waktu ke waktu untuk mendeteksi deformasi yang membantu mencegah kegagalan.
Pemindai 3D saat ini merupakan alat yang sangat diperlukan di banyak sektor. Pengembangan teknik baru, seperti cahaya terstruktur, telah menghasilkan pemindai 3D baru yang menawarkan resolusi dan akurasi tinggi, dikombinasikan dengan kecepatan akuisisi data yang tinggi dan harga yang ekonomis. Contohnya adalah pemindai Calibry dan Calibry Mini baru atau seri EinScan dari Shining.
pencetakan 3D
TUJUAN Setelah menyelesaikan unit ini, Anda seharusnya dapat: • Identifikasi Penggiling Permukaan. • Identifikasi Prosedur. • Jelaskan prosedur Dressing the Wheel. • Jelaskan Tes Dering. • Jelaskan cara mengganti Roda Gerinda. • Jelaskan prosedur memilih roda gerinda. • Buat daftar bahan abr
Dalam gambar bagian mekanis, toleransi vertikal memungkinkan perancang untuk menentukan sejauh mana orientasi fitur bagian sudut kanan dapat bervariasi. Simbol tegak lurus biasanya digunakan pada gambar untuk memastikan bahwa fitur kawin dapat dirakit. Vertikalitas dalam GD&T dapat berarti dua arti
Kemampuan untuk menahan keausan dan lekukan adalah dua atribut yang sangat penting dari jenis logam tertentu. Kekerasan, pengukuran sifat-sifat ini, merupakan pertimbangan utama ketika memutuskan logam mana yang akan dipilih. Untuk memastikan bahwa kekerasan substrat logam sesuai, beberapa logam men
Dalam dunia pencetakan 3D, ada kebutuhan yang meningkat untuk meningkatkan kemungkinan pembuatan semua jenis suku cadang dan penyelesaian akhir, guna membantu evolusi industri. Dalam hal ini Anda akan menemukan pelapisan krom pada komponen yang dibuat dengan Pencetak FDM 3D . Munculnya material bar