

Teknologi Industri

Manufaktur industri
Sebuah penghitung sinkron , berbeda dengan penghitung asinkron , adalah bit yang bit keluarannya berubah status secara bersamaan, tanpa riak.
Satu-satunya cara kita dapat membangun rangkaian pencacah seperti itu dari flip-flop J-K adalah dengan menghubungkan semua input clock bersama-sama, sehingga setiap flip-flop menerima pulsa clock yang sama persis pada waktu yang sama:
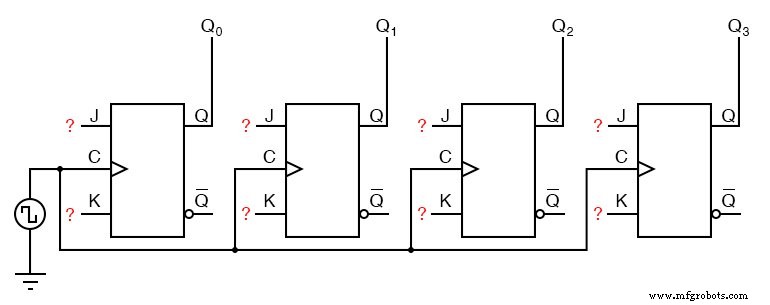
Sekarang, pertanyaannya adalah, apa yang kita lakukan dengan input J dan K? Kita tahu bahwa kita masih harus mempertahankan pola frekuensi bagi-dua yang sama untuk menghitung dalam urutan biner, dan bahwa pola ini paling baik dicapai dengan menggunakan mode "toggle" dari flip-flop, jadi fakta bahwa Input J dan K keduanya harus (kadang-kadang) "tinggi" jelas.
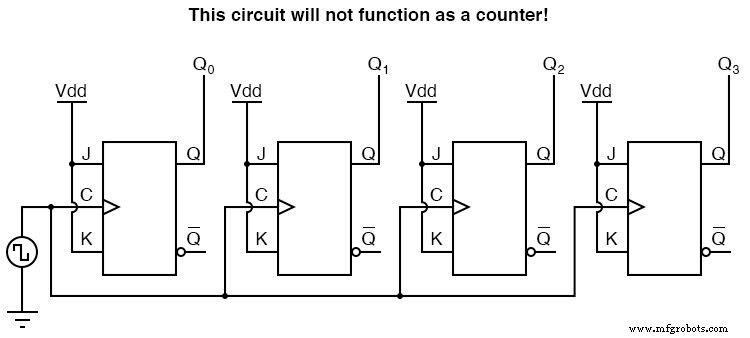
Namun, jika kita hanya menghubungkan semua input J dan K ke rel positif catu daya seperti yang kita lakukan di sirkuit asinkron, ini jelas tidak akan berfungsi karena semua flip-flop akan beralih pada saat yang sama:dengan masing-masing dan setiap pulsa jam!
Mari kita periksa lagi urutan penghitungan biner empat bit, dan lihat apakah ada pola lain yang memprediksi pergantian bit.
Desain rangkaian penghitung asinkron didasarkan pada fakta bahwa setiap bit beralih terjadi pada saat yang sama dengan bit sebelumnya beralih dari "tinggi" ke "rendah" (dari 1 ke 0).
Karena kita tidak dapat melakukan clock toggling dari bit berdasarkan toggling dari bit sebelumnya dalam rangkaian counter sinkron (untuk melakukannya akan menciptakan efek riak), kita harus menemukan beberapa pola lain dalam urutan pencacahan yang dapat digunakan untuk memicu bit. beralih:
Memeriksa urutan hitungan biner empat bit, pola prediksi lain dapat dilihat.
Perhatikan bahwa sebelum bit mati, semua bit sebelumnya adalah “tinggi:”
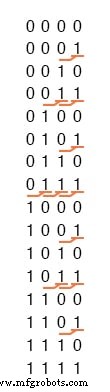
Pola ini juga dapat kita manfaatkan dalam mendesain rangkaian counter.
Jika kita mengaktifkan setiap flip-flop JK untuk beralih berdasarkan apakah semua keluaran flip-flop sebelumnya (Q) adalah "tinggi", kita dapat memperoleh urutan penghitungan yang sama dengan rangkaian asinkron tanpa efek riak, karena setiap flip-flop di sirkuit ini akan dicatat pada waktu yang sama:
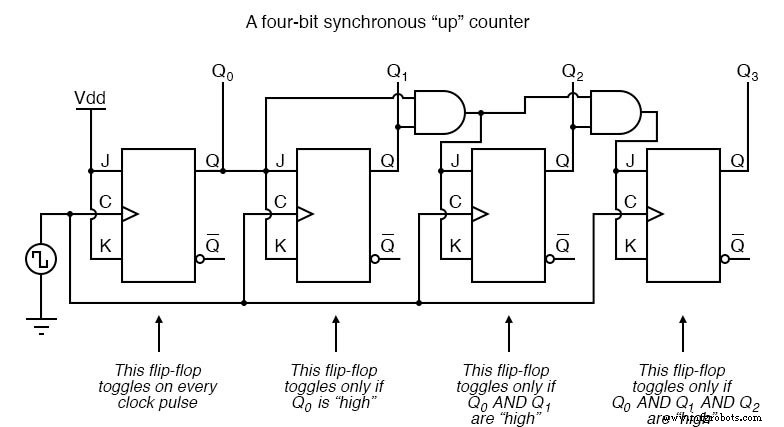
Hasilnya adalah empat bit sinkron penghitung "naik". Setiap flip-flop tingkat tinggi siap untuk beralih (baik J dan K memasukkan “tinggi”) jika output Q dari semua flip-flop sebelumnya adalah “tinggi”.
Jika tidak, input J dan K untuk flip-flop itu akan menjadi “rendah”, menempatkannya ke dalam mode “latch” di mana ia akan mempertahankan status output saat ini pada pulsa clock berikutnya.
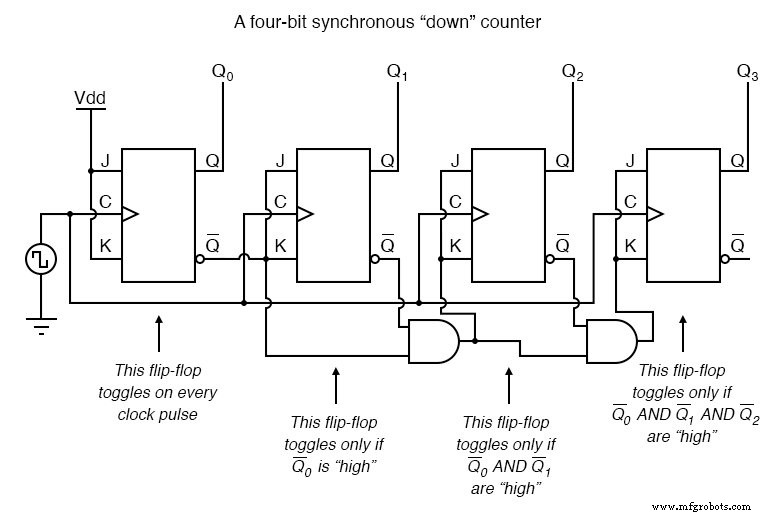
Karena flip-flop pertama (LSB) perlu beralih pada setiap pulsa clock, input J dan K-nya terhubung ke Vcc atau Vdd , di mana mereka akan "tinggi" sepanjang waktu.
Flip-flop berikutnya hanya perlu "mengenali" bahwa output Q flip-flop pertama tinggi untuk siap beralih, jadi tidak diperlukan gerbang AND.
Namun, sisa sandal jepit harus siap untuk beralih hanya ketika semua bit keluaran orde rendah adalah “tinggi”, oleh karena itu diperlukan gerbang AND.
Untuk membuat pencacah “turun” yang sinkron, kita perlu membangun sirkuit untuk mengenali pola bit yang tepat yang memprediksi setiap status sakelar saat menghitung mundur.
Tidak mengherankan, ketika kita memeriksa urutan hitungan biner empat bit, kita melihat bahwa semua bit sebelumnya adalah "rendah" sebelum beralih (mengikuti urutan dari bawah ke atas):

Karena setiap flip-flop JK dilengkapi dengan output Q' serta output Q, kita dapat menggunakan output Q' untuk mengaktifkan mode sakelar pada setiap flip-flop berikutnya, karena setiap Q' akan "tinggi" setiap saat Q masing-masing "rendah:"
Mengambil ide ini satu langkah lebih jauh, kita dapat membangun rangkaian penghitung dengan mode penghitungan "naik" dan "turun" yang dapat dipilih dengan memiliki dua baris gerbang AND yang mendeteksi kondisi bit yang sesuai untuk urutan penghitungan "naik" dan "turun", masing-masing, kemudian gunakan gerbang OR untuk menggabungkan output gerbang AND ke input J dan K dari setiap flip-flop berikutnya:
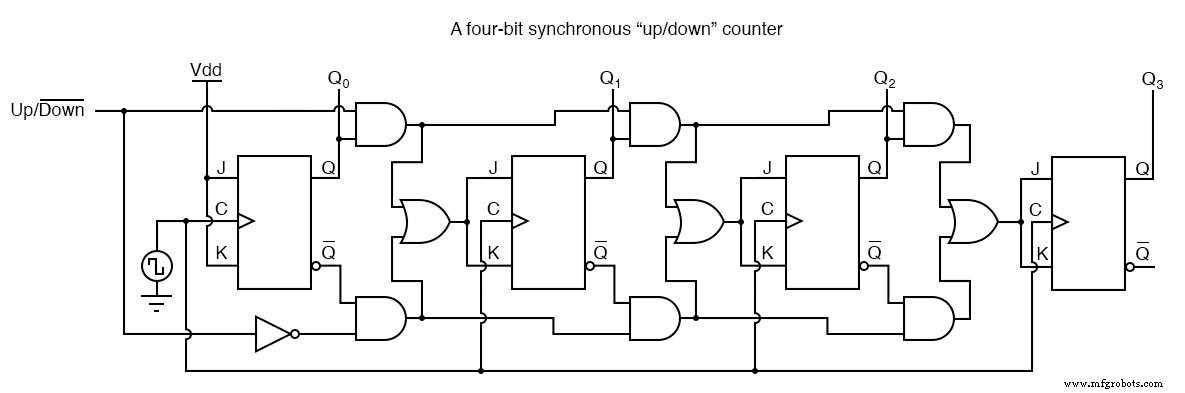
Sirkuit ini tidak serumit seperti yang terlihat pertama kali. Jalur input kontrol Atas/Bawah hanya memungkinkan string atas atau string bawah gerbang AND untuk meneruskan output Q/Q ke tahap flip-flop berikutnya.
Jika garis kontrol Atas/Bawah adalah “tinggi”, gerbang AND atas menjadi aktif, dan rangkaian berfungsi sama persis dengan rangkaian pencacah sinkron (“atas”) pertama yang ditunjukkan di bagian ini.
Jika garis kontrol Atas/Bawah dibuat “rendah”, gerbang AND bawah menjadi aktif, dan rangkaian berfungsi identik dengan rangkaian penghitung (“turun” kedua) yang ditunjukkan di bagian ini.
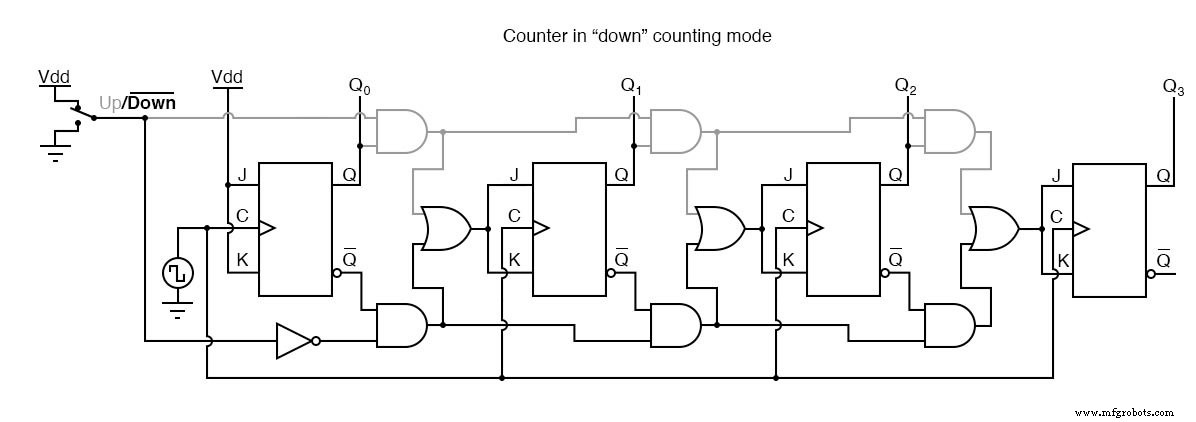
Sebagai ilustrasi, berikut adalah diagram yang menunjukkan sirkuit dalam mode penghitungan "naik" (semua sirkuit yang dinonaktifkan ditampilkan dalam warna abu-abu, bukan hitam):

Di sini, ditampilkan dalam mode penghitungan "turun", dengan warna abu-abu yang sama mewakili sirkuit yang dinonaktifkan:
Rangkaian penghitung naik/turun adalah perangkat yang sangat berguna. Aplikasi umum adalah dalam kontrol gerak mesin, di mana perangkat yang disebut encoder poros putar mengubah rotasi mekanis menjadi serangkaian pulsa elektrik, pulsa ini “mencatat” sirkuit penghitung untuk melacak gerakan total:
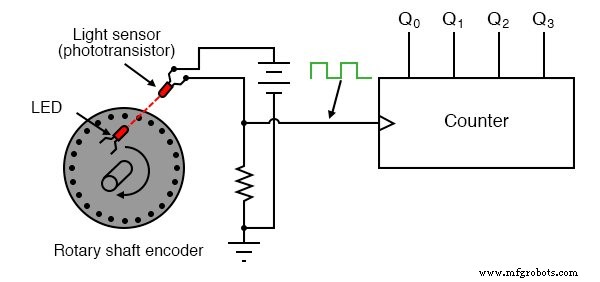
Saat mesin bergerak, ia memutar poros encoder, membuat dan memecahkan berkas cahaya antara LED dan fototransistor, sehingga menghasilkan pulsa clock untuk meningkatkan rangkaian counter.
Dengan demikian, penghitung mengintegrasikan, atau mengumpulkan, gerakan total poros, yang berfungsi sebagai indikasi elektronik seberapa jauh mesin telah bergerak.
Jika yang kami pedulikan hanyalah melacak gerakan total, dan tidak peduli untuk memperhitungkan perubahan arah gerakan, pengaturan ini sudah cukup.
Namun, jika kita ingin penghitung bertambah dengan satu arah gerakan dan pengurangan dengan arah gerakan yang berlawanan, kita harus menggunakan pencacah atas/bawah, dan rangkaian encoder/decoding yang memiliki kemampuan untuk membedakan arah yang berbeda.
Jika kita mendesain ulang encoder untuk memiliki dua set pasangan LED/fototransistor, pasangan tersebut disejajarkan sedemikian rupa sehingga sinyal keluaran gelombang perseginya adalah 90 o keluar dari fase satu sama lain, kami memiliki apa yang dikenal sebagai keluaran kuadratur encoder (kata "quadrature" hanya mengacu pada 90 o pemisahan sudut).
Sirkuit pendeteksi fase dapat dibuat dari flip-flop tipe-D, untuk membedakan urutan pulsa searah jarum jam dari urutan pulsa berlawanan arah jarum jam:
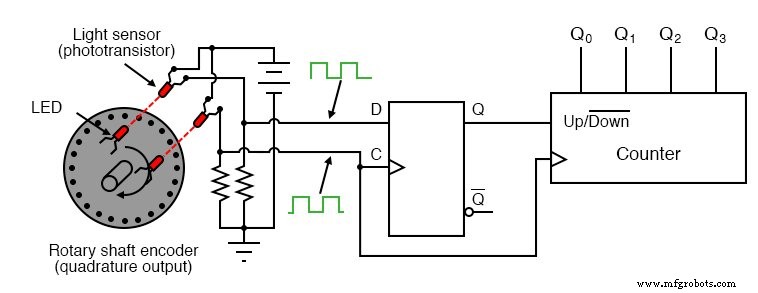
Ketika encoder berputar searah jarum jam, gelombang persegi sinyal input “D” akan memimpin gelombang persegi input “C”, artinya input “D” sudah menjadi “tinggi” ketika transisi “C” dari “rendah” ke “tinggi”, jadi setelan flip-flop tipe-D (membuat output Q “tinggi”) dengan setiap pulsa clock.
Output Q "tinggi" menempatkan penghitung ke mode hitungan "Naik", dan setiap pulsa clock yang diterima oleh jam dari encoder (dari salah satu LED) akan menaikkannya.
Sebaliknya, ketika encoder membalikkan putaran, input "D" akan tertinggal di belakang bentuk gelombang input "C", yang berarti bahwa itu akan menjadi "rendah" ketika bentuk gelombang "C" bertransisi dari "rendah" ke "tinggi", memaksa D -ketik flip-flop ke reset status (membuat output Q "rendah") dengan setiap pulsa clock.
Sinyal “rendah” ini memerintahkan rangkaian counter untuk mengurangi setiap pulsa clock dari encoder.
Sirkuit ini, atau sesuatu yang sangat mirip, merupakan inti dari setiap sirkuit pengukuran posisi berdasarkan sensor pembuat enkode pulsa.
Aplikasi seperti itu sangat umum dalam robotika, kontrol peralatan mesin CNC, dan aplikasi lain yang melibatkan pengukuran gerak mekanis yang dapat dibalik.
LEMBAR KERJA TERKAIT:
Teknologi Industri
LED Berkedip Diagram Sirkuit Roulette menggunakan Timer 555 &IC 4017 Ada permainan kasino dan kata Prancis yang menyertainya yang disebut Roulette. Sirkuit ini menyerupai fungsi permainan roda Roulette, oleh karena itu nama yang diberikan untuknya. Rangkaian ini terdiri dari IC timer dan IC khusus
Jika Anda telah mengamati penghitung waktu jam menghitung angka dari 0 hingga 9 dan kembali ke 0, Anda mungkin pernah melihat operasi IC 74LS93. Meskipun demikian, ada IC penghasil pulsa lainnya seperti timer 555. Namun, pinout 74LS93 adalah IC pilihan karena beberapa alasan. Salah satunya adalah
Pernahkah Anda mengalami gangguan TV dengan sinyal radio sebelumnya? Atau pernahkah Anda bertanya-tanya mengapa Anda mematikan perangkat elektronik saat naik pesawat? Nah, alasannya sederhana; interferensi elektromagnetik (EMI).EMI adalah fenomena yang cukup umum dengan perangkat elektronik. Tapi pe
Mari kita hadapi itu. Crosstalk PCB adalah masalah besar yang dihadapi rata-rata insinyur dengan PCB berkecepatan tinggi. Saat ini, kami memiliki lebih banyak papan kompak, sehingga lebih penting untuk menganalisis crosstalk sebelum merakit PCB. Namun, jika Anda tidak terbiasa dengan konsep crossta