Mobil dengan Kontrol Suara
Komponen dan persediaan
 | | × | 1 | |
 | | × | 1 | |
| | × | 2 | |
 | | × | 1 | |
 | | Driver motor H-Bridge Ganda Instrumen Texas L293D |
| × | 1 | |
 | | × | 1 | |
| | Modul Bluetooth Rendah Energi (BLE) (Generik) |
| × | 1 | |
Tentang proyek ini
Komponen:
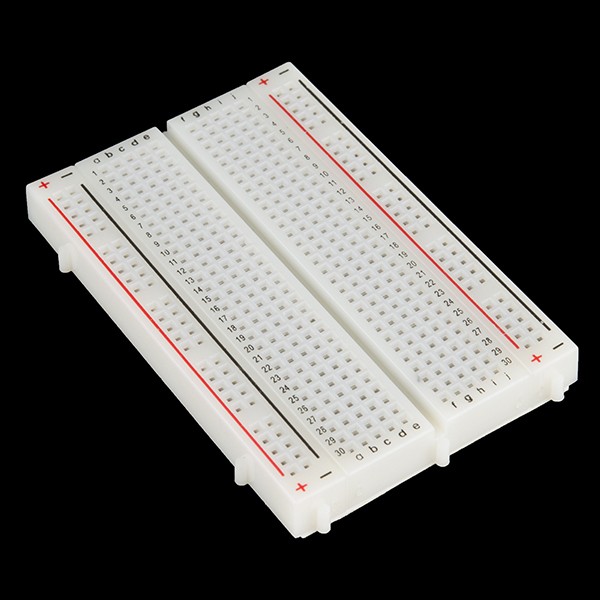
- Papan tempat memotong roti
- Sasis (dengan ukuran yang sesuai)
- Baterai 12V (sumber daya)
Anda dapat menemukan aplikasinya di sini:https://play.google.com/store/apps/details?id=appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
Ide:
Kami menghubungkan modul Bluetooth dengan aplikasi seluler. Setelah selesai, perintah yang kami berikan melalui ponsel akan dikirim ke Arduino melalui modul. Kami menerima karakter demi karakter dari buffer serial yang dikirim oleh aplikasi dan menggabungkannya untuk membentuk string.
Kami kemudian membandingkannya dengan perintah. Jika cocok, perintah dijalankan. Misalnya, ketika string yang kita terima adalah "Benar", bot akan berbelok ke kanan.
Koneksi:
Temukan semua koneksi di sini :https://yainnoware.blogspot.com/p/voice-controlled-car.html
Kode:
int motor_input1=11;int motor_input2=10;int motor_input3=5;int motor_input4=6;String voice;void setup() { Serial.begin(9600); pinMode(motor_input1, OUTPUT); //MOTOR KANAN PINMode(motor_input2, OUTPUT); //MOTOR KANAN PINMode(motor_input3, OUTPUT); //MOTOR KIRI pinMode(motor_input4, OUTPUT); //LEFT MOTOR}void loop() { while(Serial.available()>0) { delay(10); char c=Serial.baca(); if(c=='#') { istirahat; } suara+=c; } jika(suara=="maju"){ digitalWrite(motor_input1, RENDAH); digitalWrite(motor_input2, TINGGI); digitalWrite(motor_input3, RENDAH); digitalWrite(motor_input4, TINGGI); penundaan(5000); } else if(voice=="back"){ digitalWrite(motor_input1, HIGH); digitalWrite(motor_input2, RENDAH); digitalWrite(motor_input3, TINGGI); digitalWrite(motor_input4, RENDAH); delay(5000);} else if(voice=="left"){ digitalWrite(motor_input1, LOW); digitalWrite(motor_input2, TINGGI); digitalWrite(motor_input3, TINGGI); digitalWrite(motor_input4, RENDAH); penundaan (800); } else jika(suara=="kanan"){ digitalWrite(motor_input1, HIGH); digitalWrite(motor_input2, RENDAH); digitalWrite(motor_input3, RENDAH); digitalWrite(motor_input4, TINGGI); penundaan (800); } if(voice.length()>0) { Serial.println(voice); suara=""; digitalWrite(motor_input1, RENDAH); digitalWrite(motor_input2, RENDAH); digitalWrite(motor_input3, RENDAH); digitalWrite(motor_input4, RENDAH); } }


