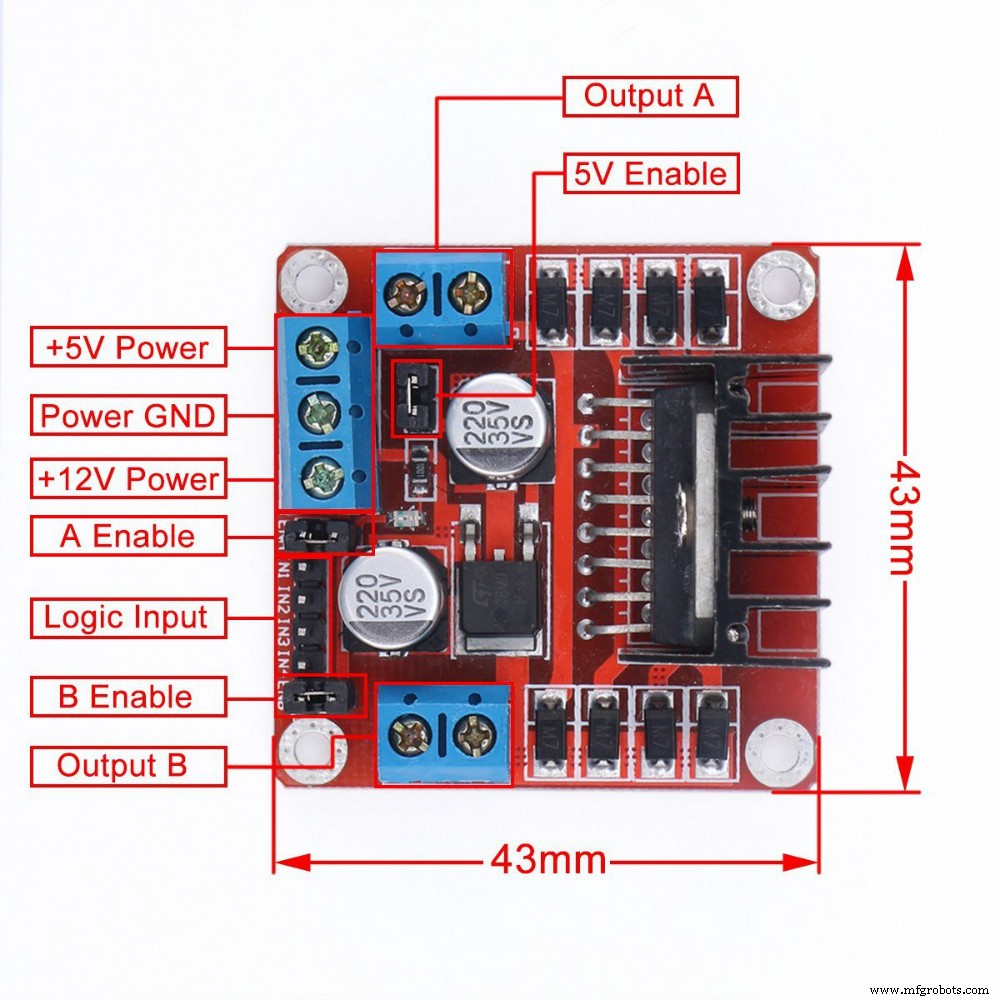
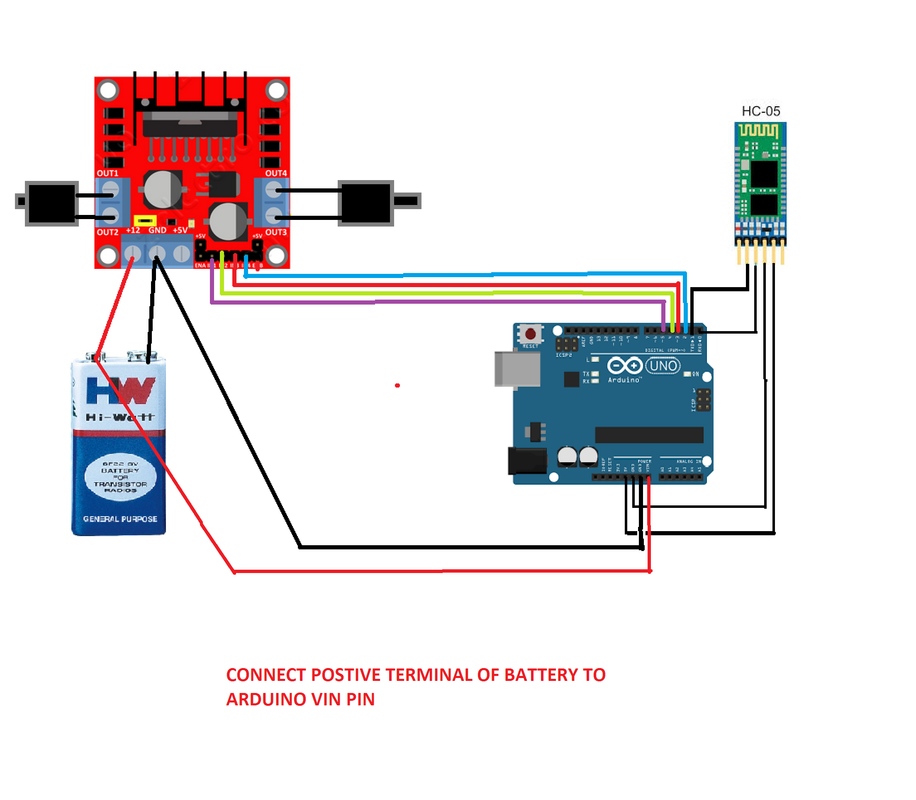
ini adalah driver motor l298 [ena, in1, in2- motor A], [enb, in3, in4- motor B], ena &enb untuk kontrol kecepatan motor A dan motor B.
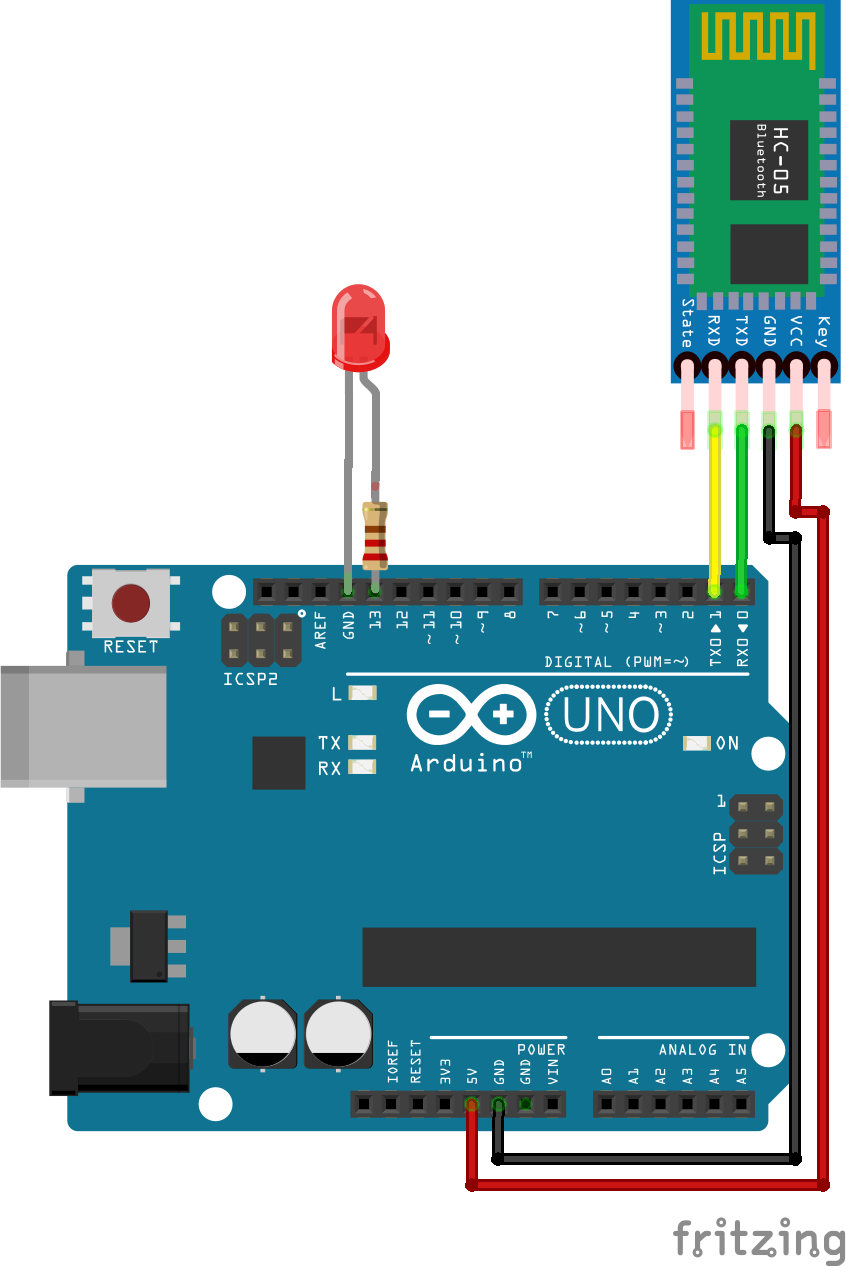
Saya telah memberikan penjelasan rinci tentang kode, ikuti kode dan buat rangkaiannya. Sebelum menyalakan catu daya, pastikan Anda telah menghubungkan semua komponen dengan benar.
Kode
hydraulic.inoArduino
// Driver motor ke-1 dan ke-2 untuk kontrol ARM// Driver motor ke-3 untuk bagian LOKOMOTIF//1 Driver Motor [BASE(2,3) AND SHOULDER(4,7)]int m1IN1 =2; //in1int m1IN2 =3; //in2int m1IN3 =4; //in3int m1IN4 =5; //in4int m1ENA =6; // untuk kontrol kecepatan, kontrol kecepatan tidak digunakan di sini jadi tetap TINGGI saat bergerak dan buat RENDAH untuk menghentikan motorint m1ENB =7; // untuk kontrol kecepatan, kontrol kecepatan tidak digunakan di sini jadi pertahankan TINGGI saat bergerak dan buat LOW untuk menghentikan motor//2 Driver motor [ELBOW(8,9) AND GRIPPER(12,13)]int m2IN1 =8; //in1int m2IN2 =9; //in2int m2IN3 =10; //in3int m2IN4 =11; //in4int m2ENA =12; // untuk kontrol kecepatan, kontrol kecepatan tidak digunakan di sini jadi tetap TINGGI saat bergerak dan buat RENDAH untuk menghentikan motorint m2ENB =13; // untuk kontrol kecepatan, kontrol kecepatan tidak digunakan di sini jadi tetap TINGGI saat bergerak dan buat LOW untuk menghentikan motor//3 Pengemudi motor [CAR (INI,IN2)=KANAN (IN3,IN4)=LEFT]int m3IN1=14; // in1 14- Pin A0 pada arduinoint m3IN2=15; // in2 15-A1int m3IN3=16; // in3 16-A2int m3IN4=17; // in4 17-A3int m3ENA=18; // ena 18-A4 ,di sini Anda dapat menggunakan kontrol kecepatan untuk mengontrol kecepatan bagian lokomotif, untuk itu Anda harus menggunakan analogWrite() bukan digitalWrite()int m3ENB=19; // enb 19-A5 ,di sini Anda dapat menggunakan kontrol kecepatan untuk mengontrol kecepatan bagian lokomotif, untuk itu Anda harus menggunakan analogWrite() bukan digitalWrite()void setup(){ pinMode(m1IN1,OUTPUT); pinMode(m1IN2,OUTPUT); pinMode(m1IN3,OUTPUT); pinMode(m1IN4,OUTPUT); pinMode(m2IN1, OUTPUT); pinMode(m2IN2,OUTPUT); pinMode(m2IN3,OUTPUT); pinMode(m2IN4,OUTPUT); pinMode(m1ENA,OUTPUT); pinMode(m1ENB,OUTPUT); pinMode(m2ENA,OUTPUT); pinMode(m2ENB,OUTPUT); pinMode(m3IN1,OUTPUT); pinMode(m3IN2,OUTPUT); pinMode(m3IN3,OUTPUT); pinMode(m3IN4,OUTPUT); pinMode(m3ENA,OUTPUT); pinMode(m3ENB,OUTPUT); Serial.begin(9600);}void loop(){ char ip='0'; while(Serial.available()>0) // memeriksa apakah port serial menerima nilai dari hc05 atau tidak { ip=Serial.read(); // membaca data dari penundaan port serial (10); } switch(ip) { case '6' :// SHOULDER UP digitalWrite(m1IN3,HIGH); digitalWrite(m1IN4,LOW); digitalWrite(m1ENA,TINGGI); digitalWrite(m1ENB,HIGH); merusak; case '5' :// SHOULDER DOWN digitalWrite(m1IN3,LOW); digitalWrite(m1IN4,TINGGI); digitalWrite(m1ENA,TINGGI); digitalWrite(m1ENB,HIGH); merusak; case '1' :// SIKU KE ATAS digitalWrite(m2IN3,HIGH); digitalWrite(m2IN4,LOW); digitalWrite(m2ENA,TINGGI); digitalWrite(m2ENB,HIGH); merusak; case '2' :// SIKU BAWAH digitalWrite(m2IN3,LOW); digitalWrite(m2IN4,HIGH); digitalWrite(m2ENA,TINGGI); digitalWrite(m2ENB,HIGH); merusak; case '8' :// GRIP CONTRACT digitalWrite(m2IN1,HIGH); digitalWrite(m2IN2,RENDAH); digitalWrite(m2ENA,TINGGI); digitalWrite(m2ENB,HIGH); merusak; case '7' :// GRIP EXPAND digitalWrite(m2IN1,LOW); digitalWrite(m2IN2,TINGGI); digitalWrite(m2ENA,TINGGI); digitalWrite(m2ENB,HIGH); merusak; case '3' :// BASE CLOCK digitalWrite(m1IN1,HIGH); digitalWrite(m1IN2,RENDAH); digitalWrite(m1ENA,TINGGI); digitalWrite(m1ENB,HIGH); merusak; case '4' ://BASE ANTICLOCK digitalWrite(m1IN1,LOW); digitalWrite(m1IN2,TINGGI); digitalWrite(m1ENA,TINGGI); digitalWrite(m1ENB,HIGH); merusak; case '9' :// OFF digitalWrite(m1IN1,LOW); digitalWrite(m1IN2,RENDAH); digitalWrite(m1IN3,RENDAH); digitalWrite(m1IN4,LOW); digitalWrite(m1ENA,RENDAH); digitalWrite(m1ENB,RENDAH); digitalWrite(m2IN1,LOW); digitalWrite(m2IN2,RENDAH); digitalWrite(m2IN3,RENDAH); digitalWrite(m2IN4,LOW); digitalWrite(m2ENA,RENDAH); digitalWrite(m2ENB,RENDAH); digitalWrite(m3IN1,LOW); digitalWrite(m3IN2,RENDAH); digitalWrite(m3IN3,RENDAH); digitalWrite(m3IN4,LOW); digitalWrite(m3ENA,RENDAH); digitalWrite(m3ENB,RENDAH); merusak; huruf 'A' :// FORWARD digitalWrite(m3IN1,HIGH); digitalWrite(m3IN2,RENDAH); digitalWrite(m3IN3,TINGGI); digitalWrite(m3IN4,LOW); digitalWrite(m3ENA,TINGGI); digitalWrite(m3ENB,TINGGI); merusak; huruf 'D' :// BACKWARD digitalWrite(m3IN1,LOW); digitalWrite(m3IN2,TINGGI); digitalWrite(m3IN3,RENDAH); digitalWrite(m3IN4,TINGGI); digitalWrite(m3ENA,TINGGI); digitalWrite(m3ENB,TINGGI); merusak; huruf 'B' :// RIGHT digitalWrite(m3IN1,LOW); digitalWrite(m3IN2,TINGGI); digitalWrite(m3IN3,TINGGI); digitalWrite(m3IN4,LOW); digitalWrite(m3ENA,TINGGI); digitalWrite(m3ENB,TINGGI); merusak; huruf 'C' :// KIRI digitalWrite(m3IN1,HIGH); digitalWrite(m3IN2,RENDAH); digitalWrite(m3IN3,RENDAH); digitalWrite(m3IN4,TINGGI); digitalWrite(m3ENA,TINGGI); digitalWrite(m3ENB,TINGGI); merusak; }} Suku cadang dan penutup khusus
hydraulic_crane_J6NH7RouoB.apkuse m-seal agar sesuai dengan mur dengan motor. 
 pasang mur pada piston spuit menggunakan m-seal.
pasang mur pada piston spuit menggunakan m-seal.  perbaiki spuit dan motor dengan cara ini
perbaiki spuit dan motor dengan cara ini 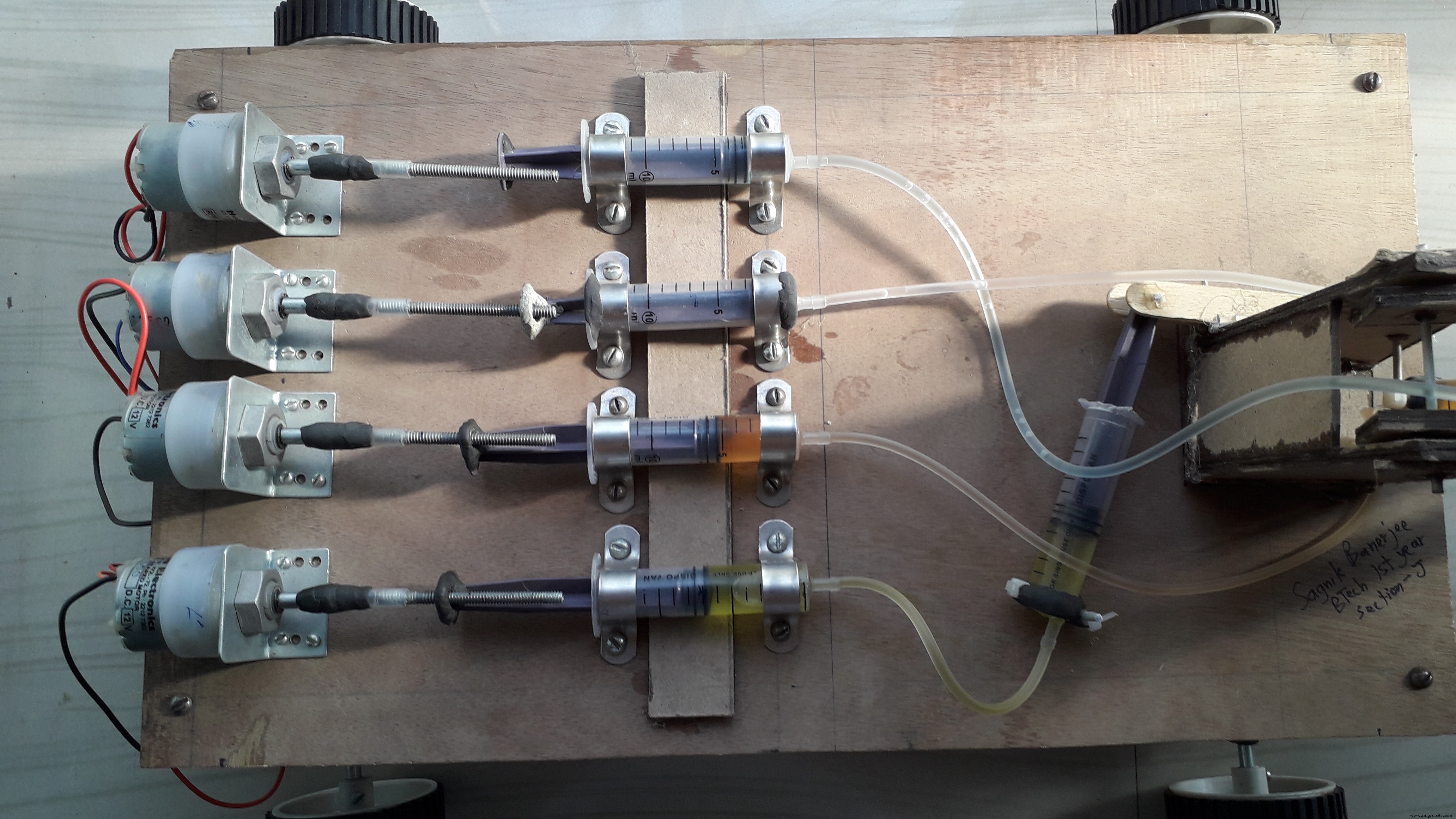 ketika motor berputar searah jarum jam mendorong piston dan ketika berputar berlawanan arah jarum jam menarik piston
ketika motor berputar searah jarum jam mendorong piston dan ketika berputar berlawanan arah jarum jam menarik piston  https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q