Tentang proyek ini
Ini adalah lengan robot pertama saya dengan fitur berikut:
- Robot 5DOF, sebenarnya 4 jika kita mengecualikan gripper
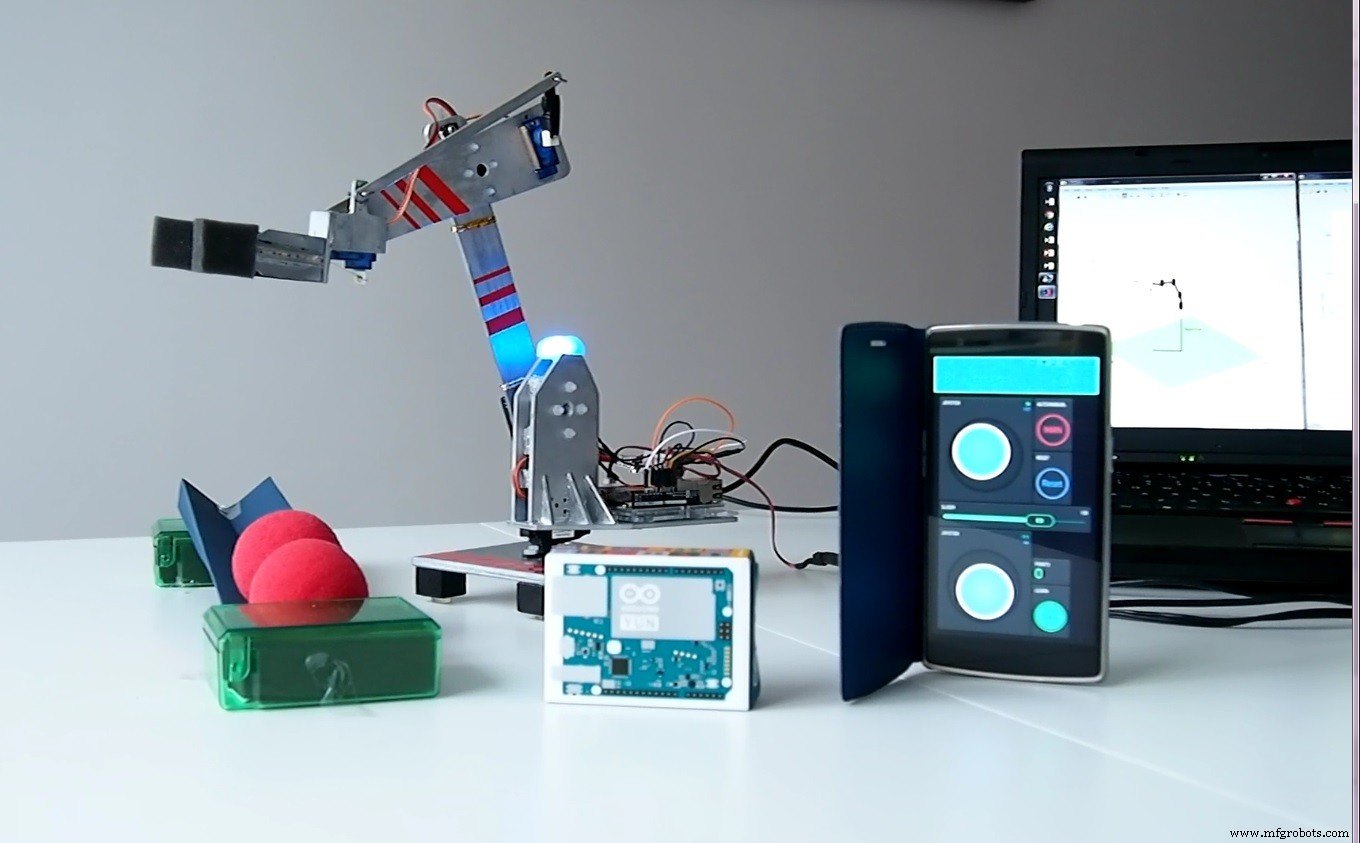
- otaknya adalah Arduino Yun dengan kemampuan IoT
- antarmuka kontrol dibangun di aplikasi Blynk
- kinematik maju diimplementasikan di Matlab menggunakan Robotika Toolbox
- perpustakaan baru yang saya tulis yang mewujudkan gerakan halus
Saya sangat senang dengan hasilnya. Oleh karena itu, saya ingin berbagi dengan Anda pengalaman saya dan bagaimana membangunnya.
Komponen &Bahan
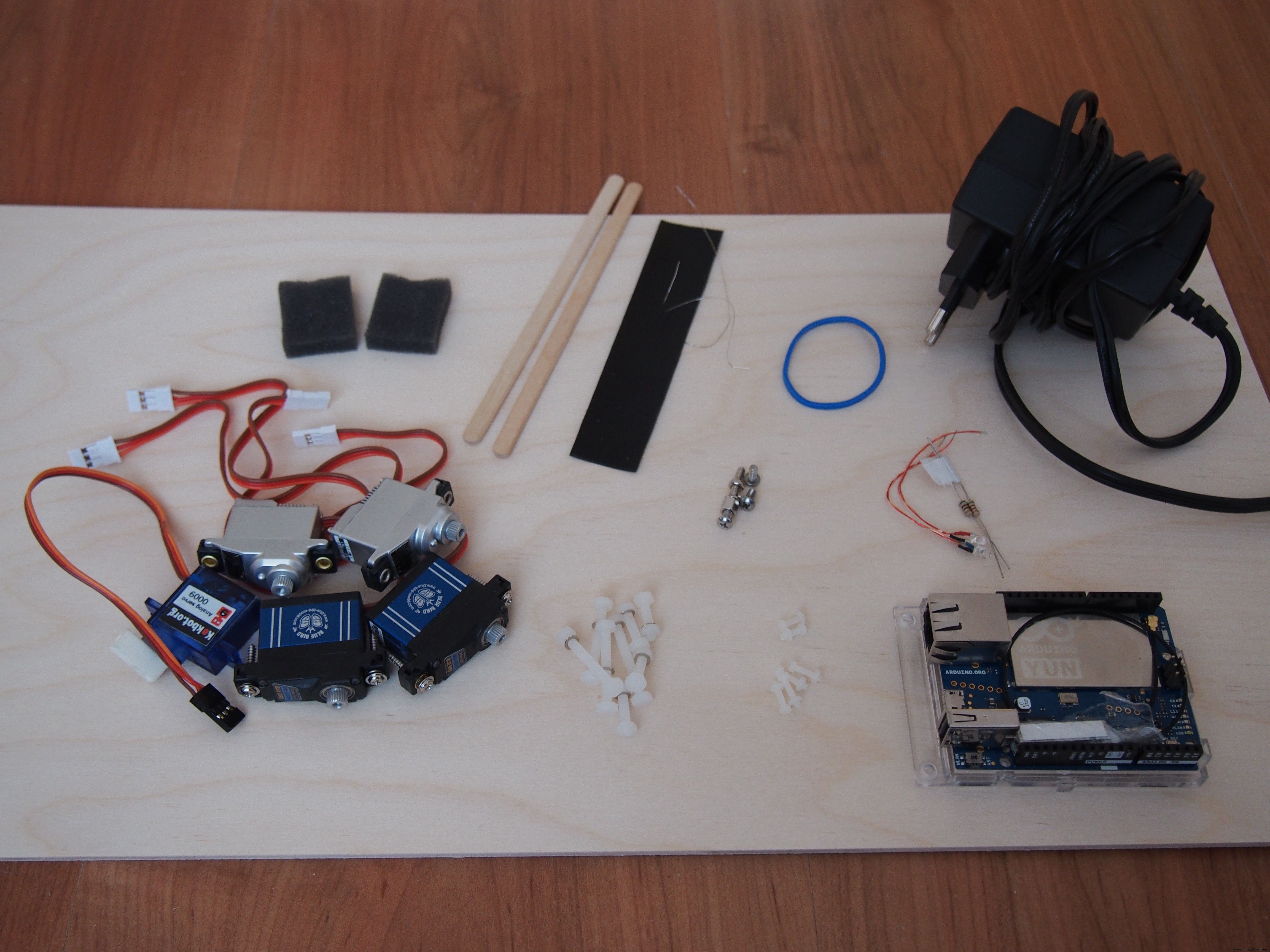
Untuk membuat robot yang Anda butuhkan:
- 1 x Arduino Yun (atau papan Arduino apa pun)
- Pengisi daya 1 x 5V, minimal 2,5 A
- 2 x resistor, masing-masing 100 ohm (untuk led merah) dan 150 ohm (untuk led biru),
- 2 x tongkat pengaduk kayu
- 1 x kawat logam (atau yang serupa)
- 1 x plastik sheet (saya ambil dari botol shower gel)
- 2 x spons kecil (lihat pojok kiri atas)
- 1 x pelat kayu 3mm (30cm x 50cm sudah lebih dari cukup)
Membangun Robot
Untuk membuat robot, mulailah dengan mengukur ukuran servos dan memeriksa torsi servos. Ini akan memberi Anda indikasi tentang ukuran lengan dan akhirnya ukuran robot. Dalam kasus saya, saya memesan 2 servos mikro torsi tinggi yang berbeda:pasangan pertama dan pasangan kedua. Ini dapat melakukan perjalanan hingga 140 derajat meskipun mereka ditentukan untuk melakukan perjalanan 120 derajat. Namun, saya menyarankan untuk membeli servo 180 derajat agar memiliki sudut perjalanan yang lebih banyak.
Untuk gripper, tidak perlu servo torsi tinggi. Servo mikro termurah di ebay dapat melakukannya.
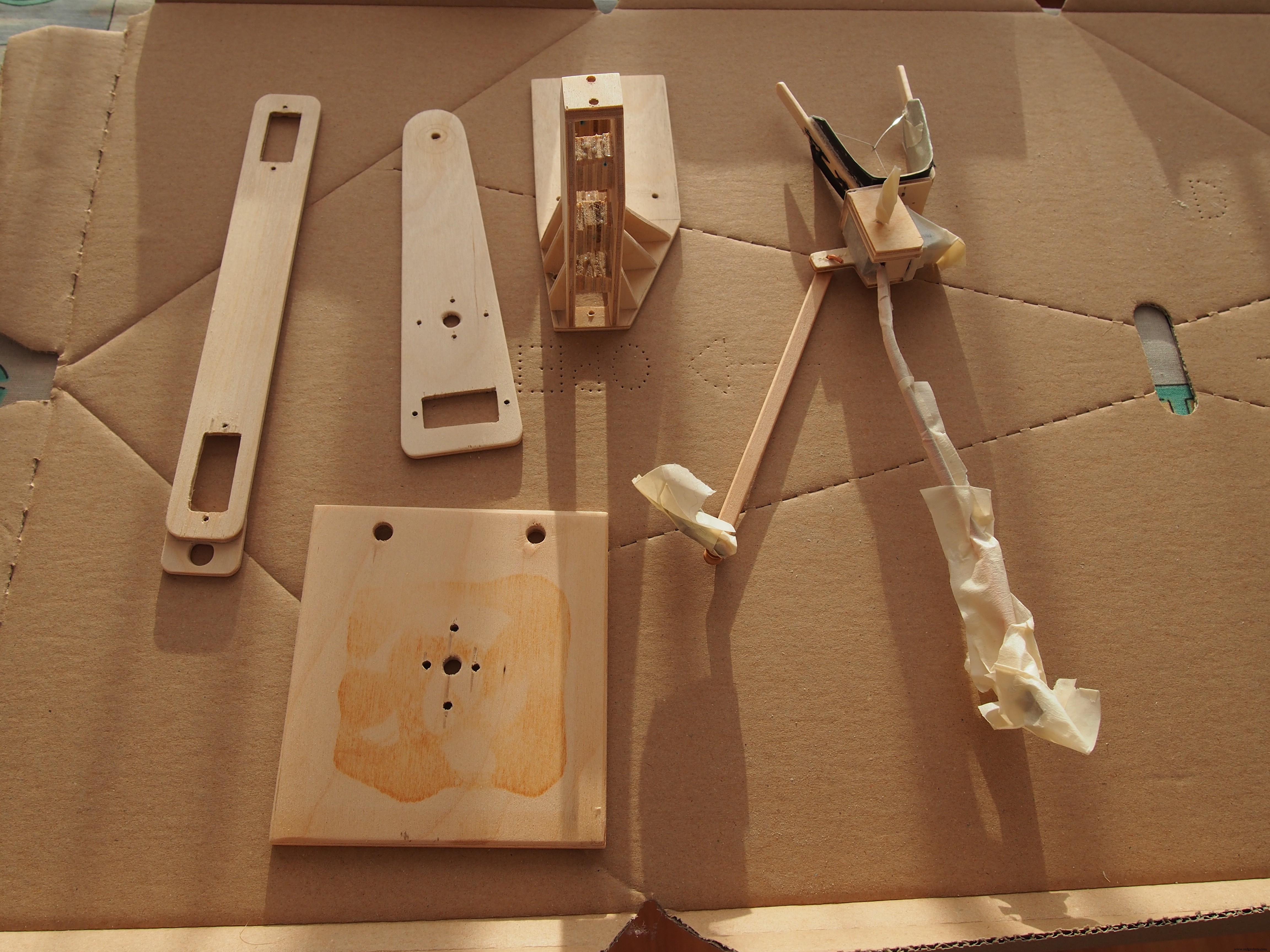
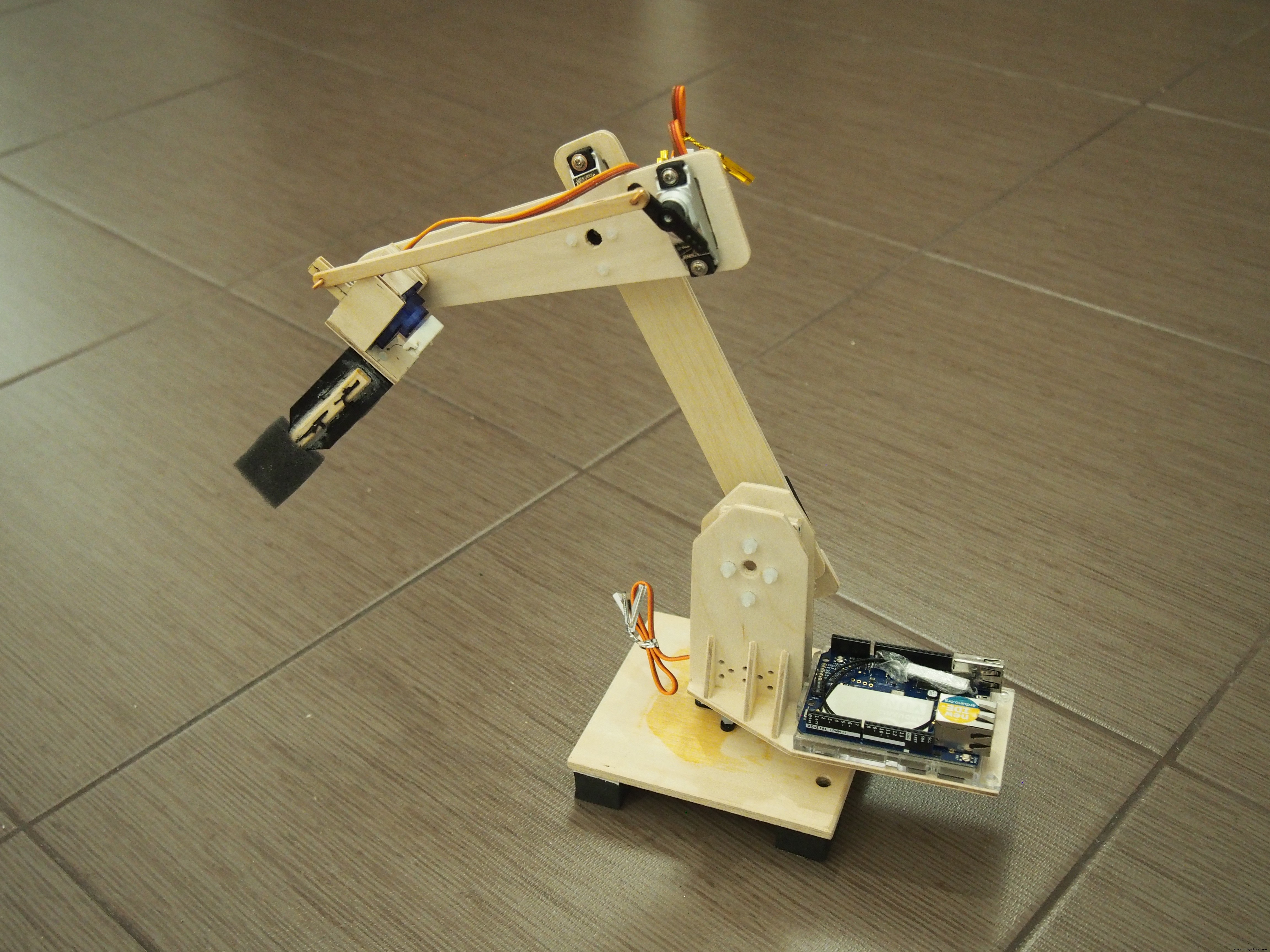
Mulailah dengan memotong lengan seperti yang Anda lihat di Foto 1. Di sini, Anda bisa berkreasi, tidak ada desain tetap, Anda bisa membuat desain sendiri. Kemudian, buat gripper menggunakan satu batang pencampur yang dipotong menjadi dua dan lembaran plastik sebagai pegas kembali. Dengan kabel yang terhubung ke sisi dalam Anda dapat menutup dan membuka gripper. Untuk robot saya, saya menggunakan satu sekrup M3 untuk membuat poros gripper. Pivot gripper dilakukan oleh servo yang terletak di sisi lain lengan untuk mendapatkan keseimbangan berat. Daya ditransmisikan melalui tongkat pencampur lain (lihat Foto 2, bagian atas robot).
Selanjutnya, buat alas dan pelat yang menahan servo dasar dan papan Arduino Yun (atau papan lain). Kumpulkan semuanya dan Anda akan memiliki sesuatu seperti di Foto 2.
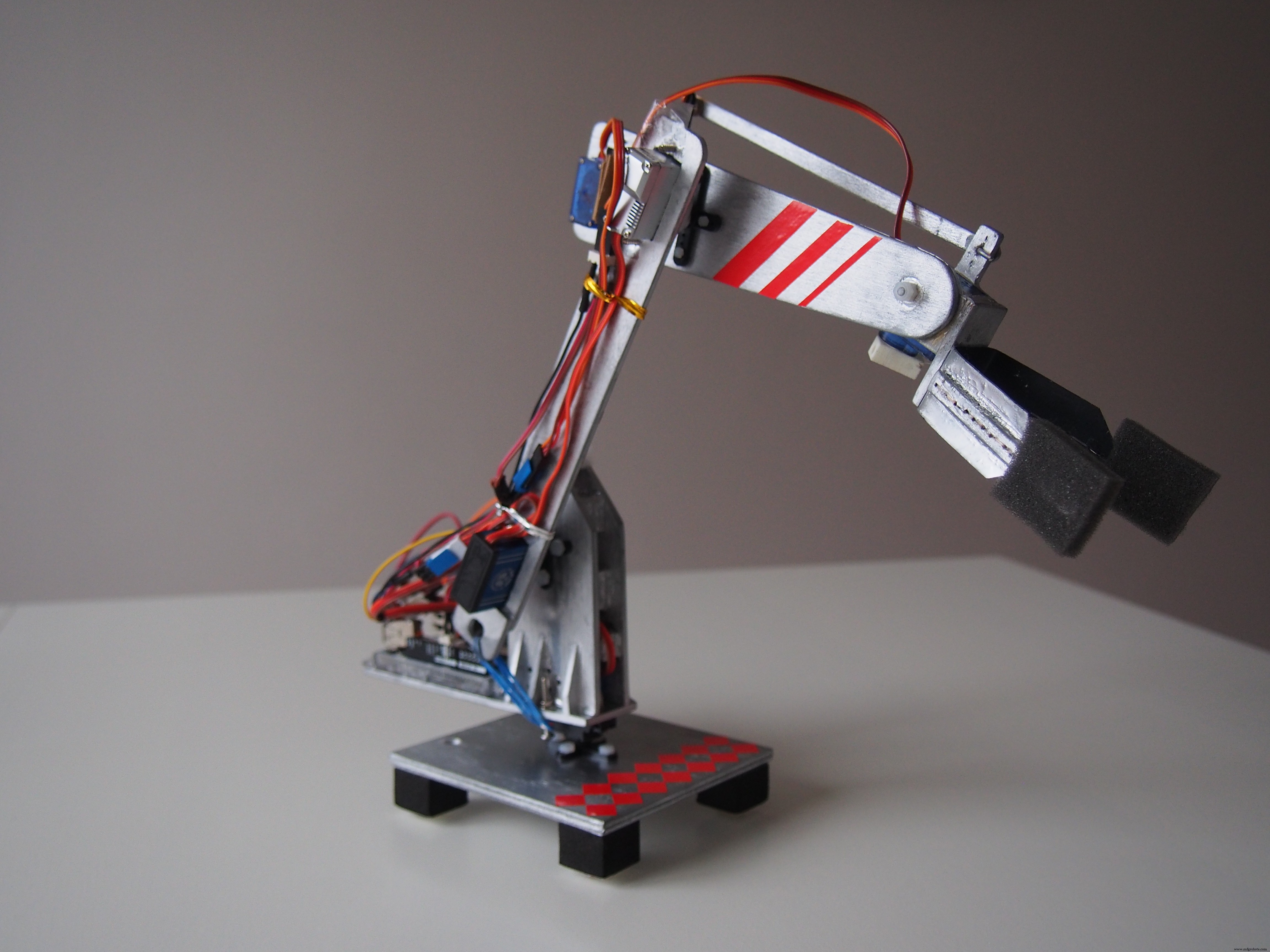
Jika Anda menginginkan desain yang terlihat lebih baik, amplas komponen kayu dan cat (seperti pada Foto 3) dengan warna pilihan Anda. Untuk robot saya, saya memilih warna perak (untuk meniru logam) dengan garis-garis merah. Hasil akhir ditunjukkan pada Foto 4.

Perangkat Lunak
Untuk software, saya mulai dengan membuat interface terlebih dahulu di Blynk. Jika Anda belum pernah menggunakan Blynk sebelumnya, silakan periksa situs web mereka tentang cara melakukannya. Seharusnya sangat mudah dan langsung.
Catatan: Jika Anda tidak memiliki board yang dapat terhubung ke internet, jangan khawatir Anda masih dapat menggunakan Blynk dengan board biasa misalnya Arduino Uno melalui port USB. Untuk melakukannya, baca di sini.
Selanjutnya, mari kita pergi ke Arduino IDE dan menulis beberapa kode. Demi kenyamanan Anda, saya lampirkan kodenya, jadi Anda bisa menggunakannya :) Untuk menjalankannya, Anda perlu melakukan hal berikut:
- Konfigurasikan papan Arduino Yun.
- Instal Blynk library di Arduino IDE Anda dengan membuka Sketch>Include Library>Manage Libraries , cari Blynk dan instal.
- Tambahkan library SimpleTimer dalam folder dengan nama SimpleTimer ke folder library Arduino Anda, biasanya Arduino\libraries\
- Tambahkan library MotionGenerator yang saya tulis, di folder dengan nama MotionGenerator ke folder library Arduino
- Kompilasi dan unggah RobotArm_instructables.ino (Catatan:jangan lupa untuk memperbarui token Blynk Anda)
Catatan: Pustaka MotionGenerator adalah solusi berbasis analitik yang akan memberi Anda transisi mulus yang bagus dari satu titik ke titik lainnya. Ini memungkinkan pembatasan kecepatan dan akselerasi maksimum.

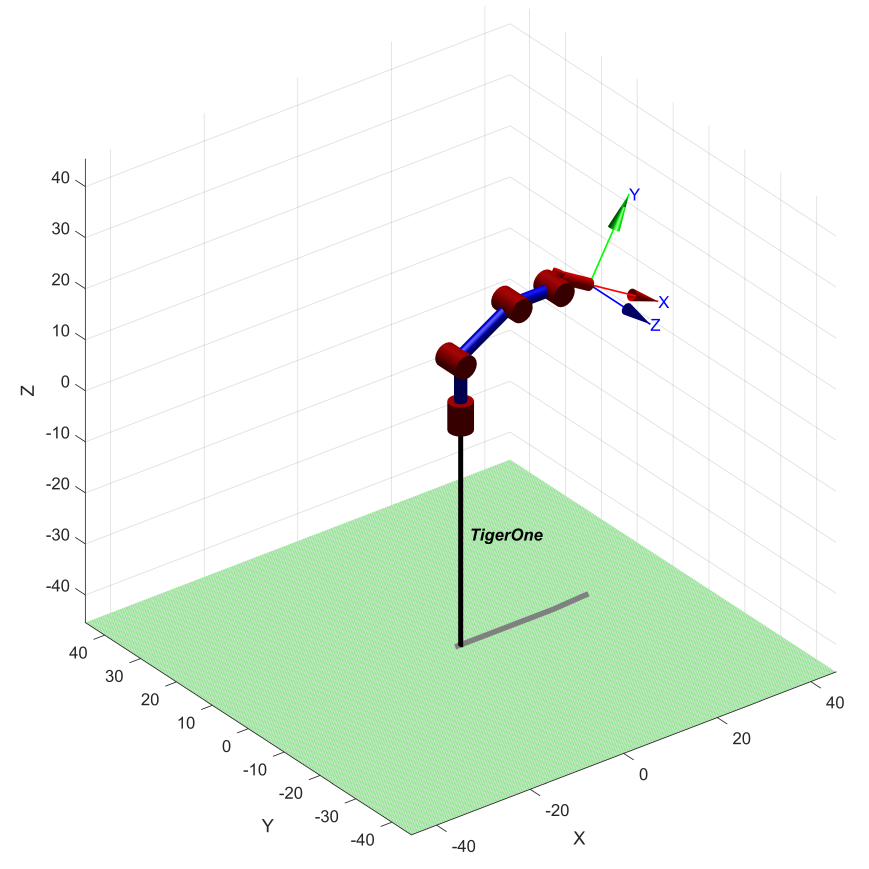
Opsional (kinematika maju, lihat Foto 3 di atas): Untuk ini, Anda memerlukan Matlab dan Robotika Toolbox. Jika Anda memiliki semua ini, pastikan robot Anda terhubung ke Blynk dan terhubung ke port USB komputer Anda. Matlab akan mengumpulkan informasi dari Arduino melalui komunikasi serial. Jadi, pastikan untuk mengisi port COM yang benar di MainScrip.m. Terakhir, jalankan saja MainScrip.m.
Catatan:Kinematika robot adalah untuk robot saya sendiri. Untuk robot Anda, dimensinya mungkin berbeda (jangan ragu untuk menyesuaikan di robotKinematicsFcn.m).
Kode
File sumberC/C++
Arsip zip yang berisi file kode sumber.Tidak ada pratinjau (hanya unduhan).
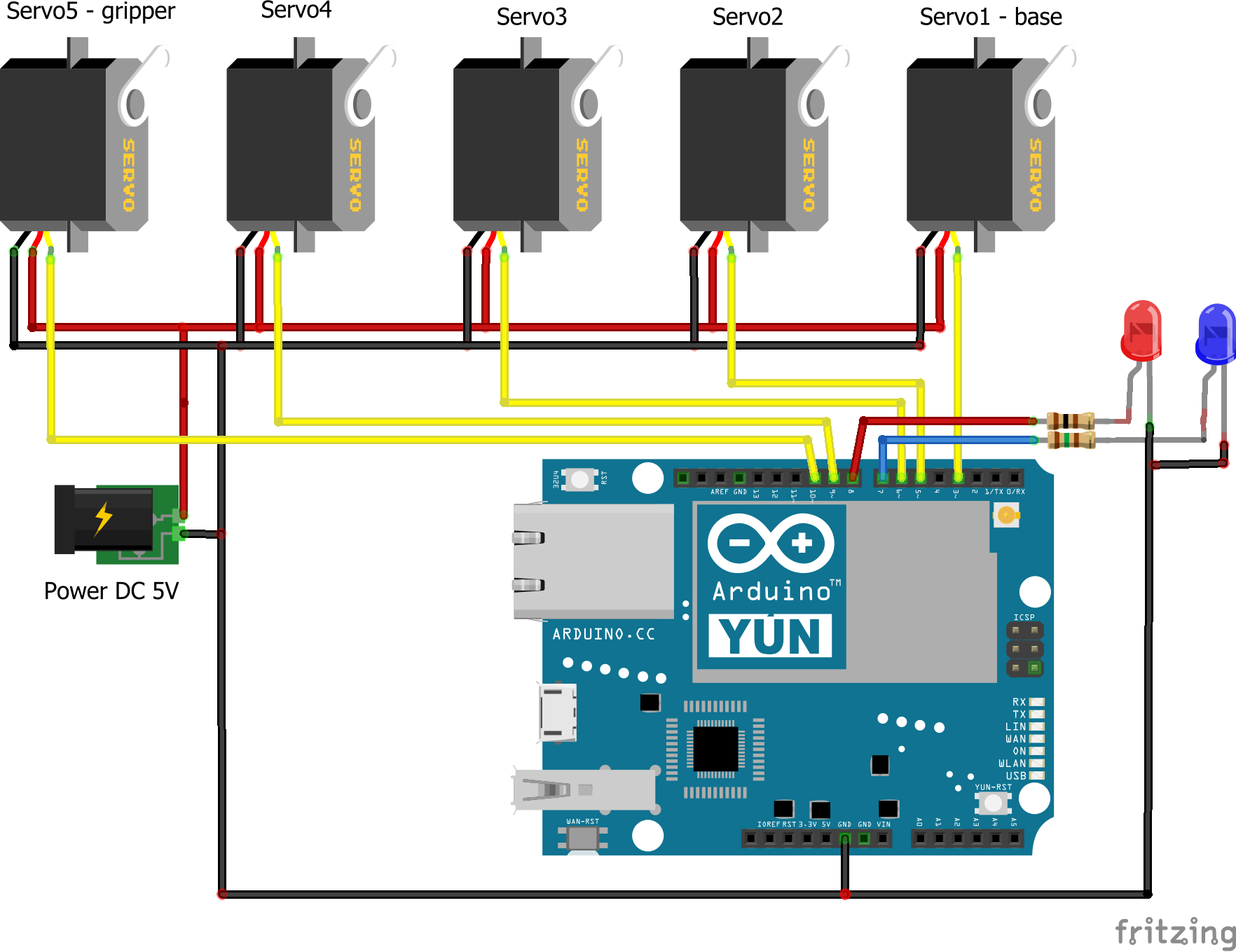
Skema