


Proses manufaktur
Dalam tutorial ini saya akan menunjukkan kepada Anda bagaimana saya membangun replika Mars Perseverance Rover. Tentu saja, terinspirasi oleh penjelajah nyata yang sedang menjelajahi Mars, saya merancang penjelajah ini sedemikian rupa sehingga semua orang yang menyukai teknologi ini, pelajar, pembuat, penggemar mekatronik atau robotika, dan sebagainya, dapat dengan mudah mengikuti instruksi dalam video ini dan membangun Mars Rover mereka sendiri.
Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini.
Ringkasan
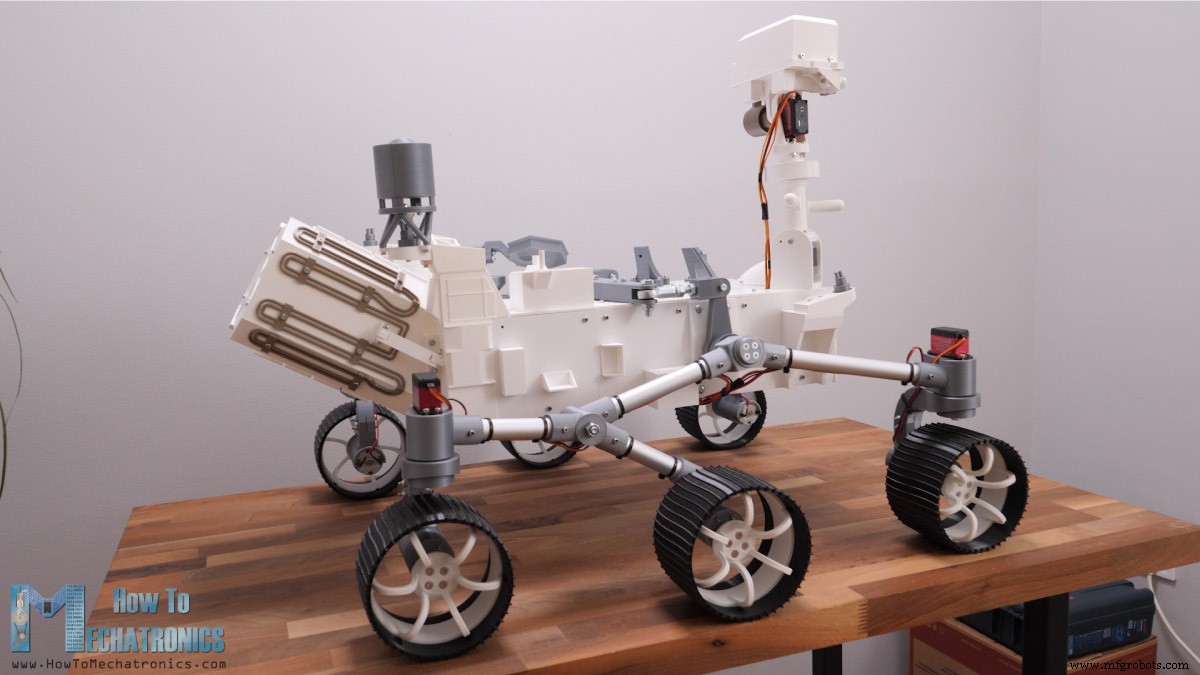
Mari kita lihat fitur utama rover ini. Mobil ini menggunakan suspensi rocker-bogie yang memungkinkan rover berjalan mulus di medan yang tidak rata dan memanjat rintangan, seperti bebatuan, yang berukuran hingga dua kali diameter roda sekaligus menjaga keenam roda tetap bersentuhan dengan tanah sepanjang waktu. Setiap roda memiliki motor DC independen yang menggerakkan rover maju atau mundur.

Empat roda sudut memiliki motor servo kemudi individu. Untuk mengarahkan rover secara efisien dan menghindari ban tergelincir saat berkendara di tikungan, kami menerapkan geometri kemudi Ackermann. Dengan geometri ini kita dapat menghitung kecepatan dan sudut setiap roda tergantung pada radius putar.
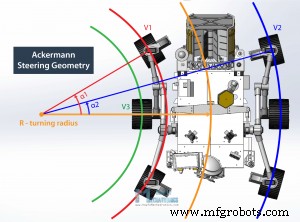
Artinya, saat berbelok, roda kemudi bagian dalam akan memiliki sudut yang lebih besar dibandingkan dengan roda bagian luar. Pada saat yang sama, roda bagian dalam akan memiliki kecepatan yang lebih lambat dibandingkan dengan roda bagian luar.

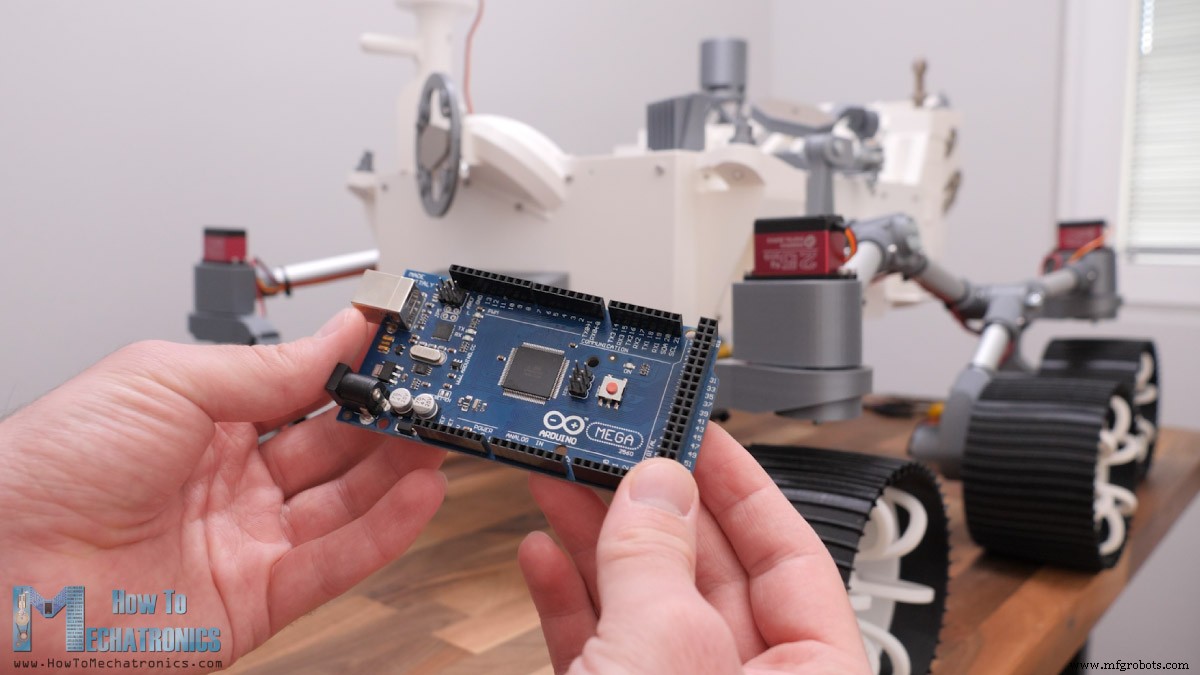
Untuk mengendalikan rover, saya menggunakan RC Transmitter komersial murah yang mengirimkan perintah ke rover. Di rover saya memiliki penerima RC yang sesuai yang menerima perintah dan mengirimkannya ke papan Arduino. Ya, otak dari penjelajah Mars ini sebenarnya adalah papan Arduino MEGA dan untuk menghubungkan semuanya dengan mudah, saya membuat PCB khusus yang dapat dengan mudah dipasang di atas papan Arduino MEGA.
Rover juga dilengkapi kamera FPV yang terletak di unit kamera. Itu dikendalikan menggunakan stepper dan motor servo dan saya menerima video real-time di smartphone.

Saya ingin mencatat di sini bahwa banyak bagian yang sebenarnya tidak berfungsi, atau mereka hadir hanya untuk mencocokkan penampilan rover yang sebenarnya. Selain itu, lengan robotiknya tidak ada, tetapi saya berencana untuk membuat lengan tersebut dan menambahkan lebih banyak fungsi ke penjelajah ini di video mendatang.
Namun demikian, sekarang izinkan saya memandu Anda melalui proses membangunnya, mulai dari merancang bajak, menghubungkan komponen elektronik, dan memprogram papan Arduino.
Model 3D Mars Rover DIY
Saya mendesain rover Mars ini menggunakan 3D EXPERIENCE Solidworks yang merupakan sponsor dari video ini.
3DEXPERIECE Solidworks adalah versi Solidworks dengan kemampuan cloud yang kami dapatkan melalui platform 3DEXPERIECE. Di sini semuanya bekerja melalui cloud, sehingga Anda atau siapa pun dari tim Anda dapat memiliki akses ke data atau model kapan saja, dari mana saja di dunia. Platform 3DEXPERIECE juga mencakup banyak aplikasi produktivitas dan manajemen data yang berguna.
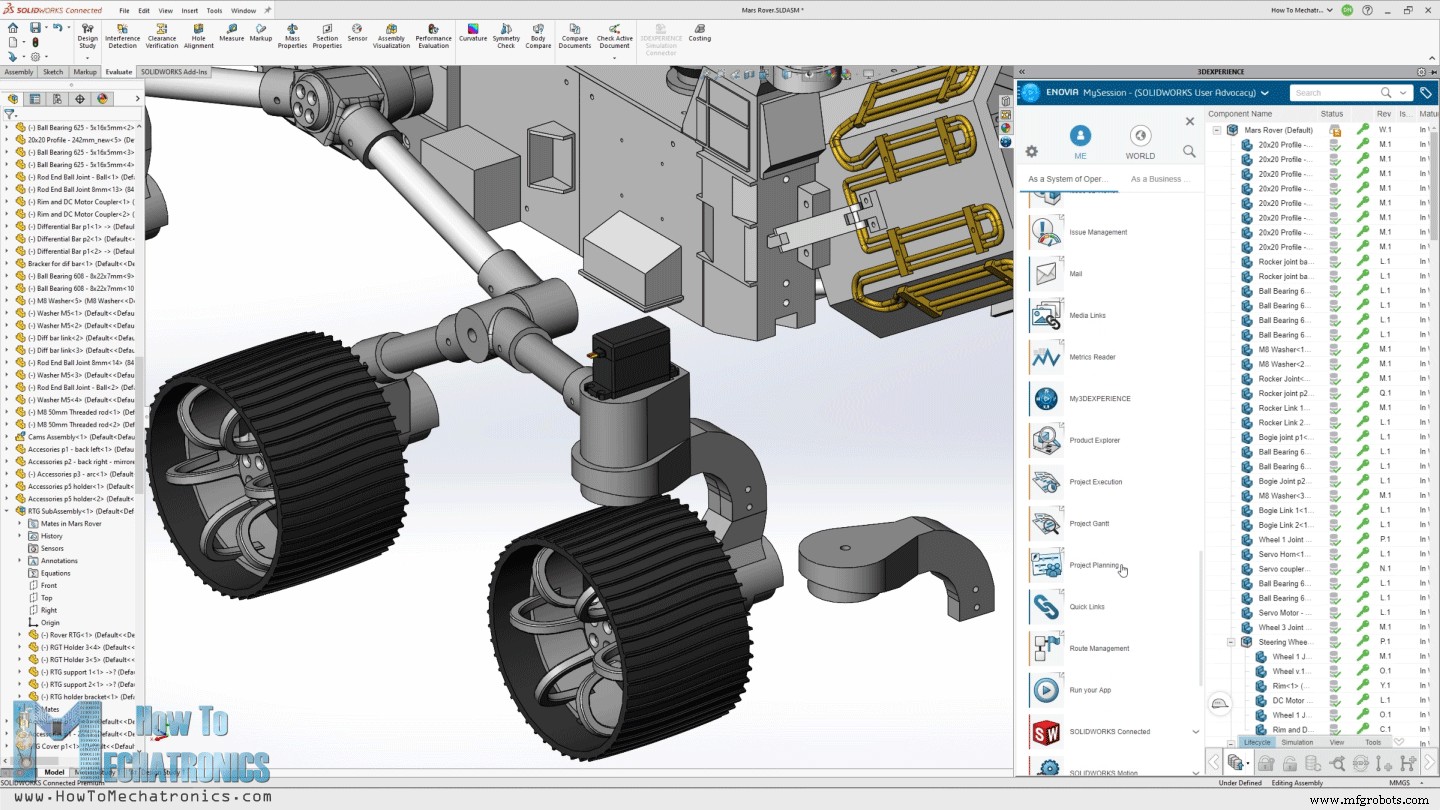
Misalnya, aplikasi Perencanaan Proyek adalah cara yang bagus untuk mengatur tugas Anda, menetapkan tenggat waktu, dan melacak kemajuan Anda. Dengan aplikasi Markup 3D, Anda dapat melihat, menjelajahi, dan mencatat model dari perangkat apa pun, seperti notebook, tablet, atau bahkan ponsel cerdas.
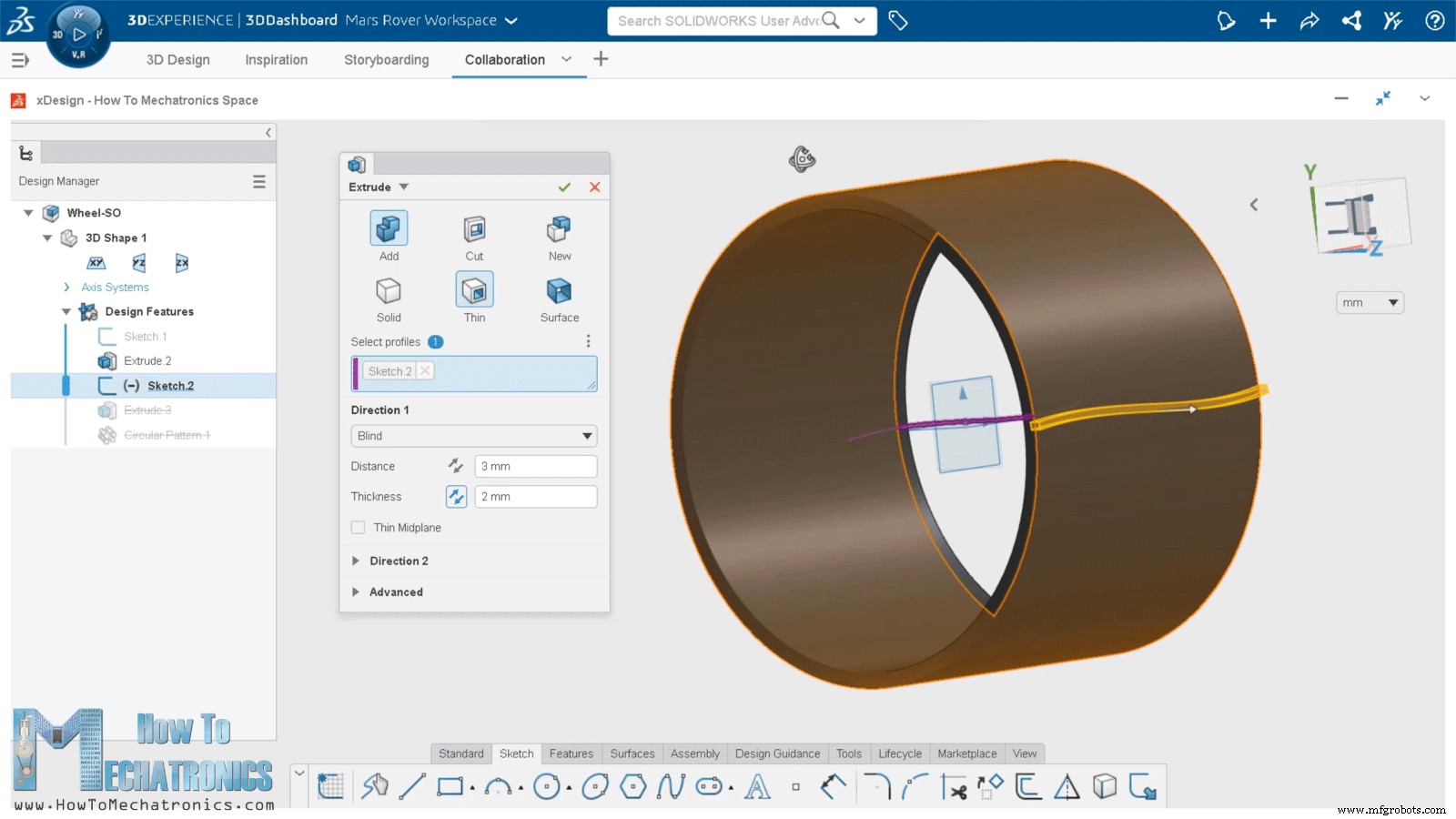
Ada juga pembuat model 3D berbasis cloud terpisah yang disebut SOLIDWORKS xDesign, yang berjalan di dalam browser Anda. Ini dapat digunakan bersama dengan Solidworks atau sendiri dan sangat bagus untuk pemodelan, di mana saja, kapan saja, dan di perangkat apa pun.
Namun demikian, mungkin kabar yang paling menarik bagi banyak dari kalian di sini adalah bahwa mulai dari paruh kedua tahun ini, akan ada 3DEXPERIECE Solidworks versi pembuat yang bisa Anda dapatkan hanya dengan $99 per tahun. Terima kasih banyak kepada Solidworks karena telah mensponsori konten pendidikan seperti ini.
Jika Anda ingin mengetahui apakah SOLIDWORKS dan platform 3DEXPERIENCE dapat bekerja untuk Anda, periksa tautan berikut di bawah.
Coba 3DEXPERIENCE gratis dengan tautan khusus saya: www.solidworks.com/HTMTryNow
Pelajari lebih lanjut tentang 3DEXPERIENCE SOLIDWORKS: www.solidworks.com/HTMLearnMore
3DEXPERIENCE SOLIDWORKS untuk Pembuat:www.solidworks.com/htm
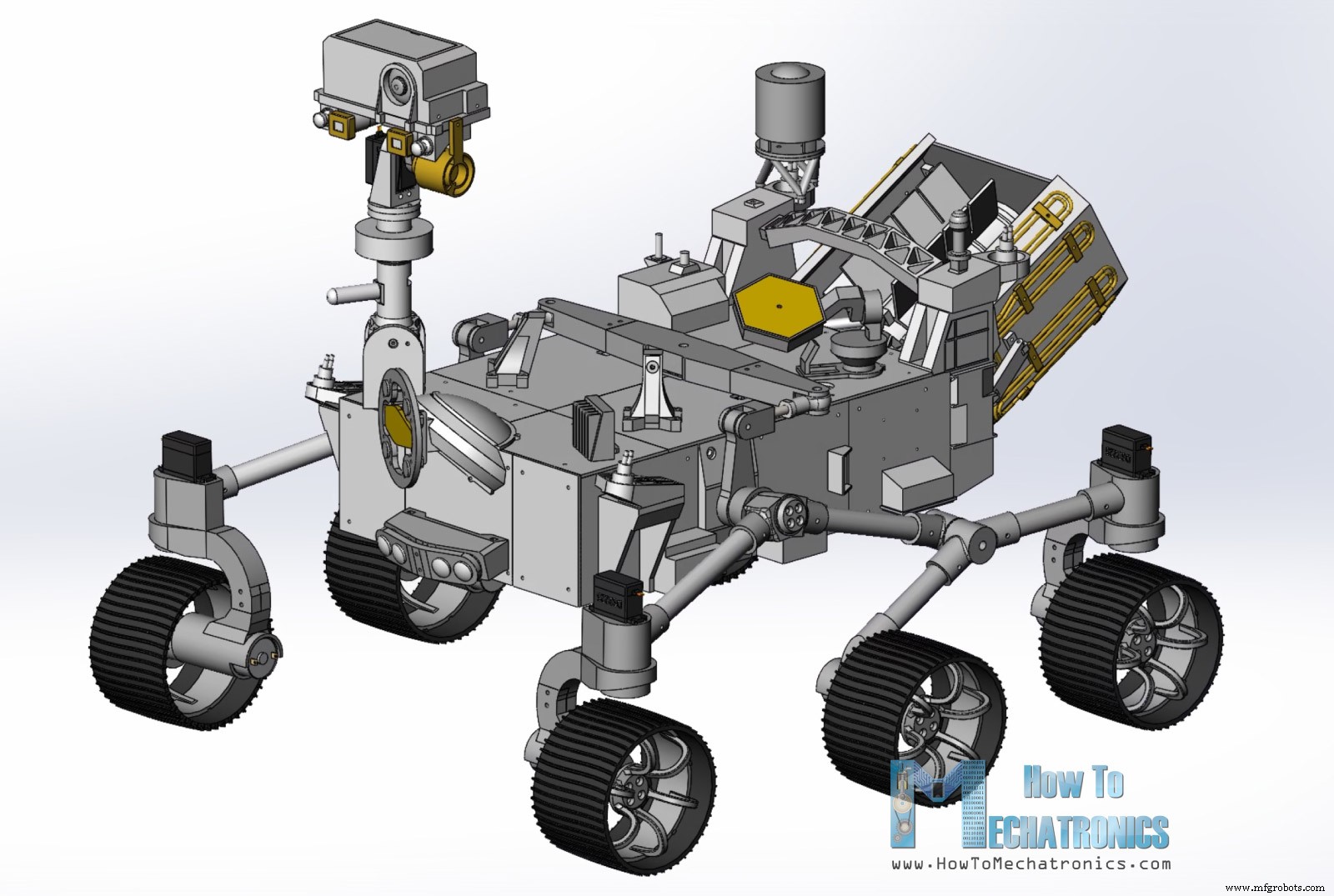
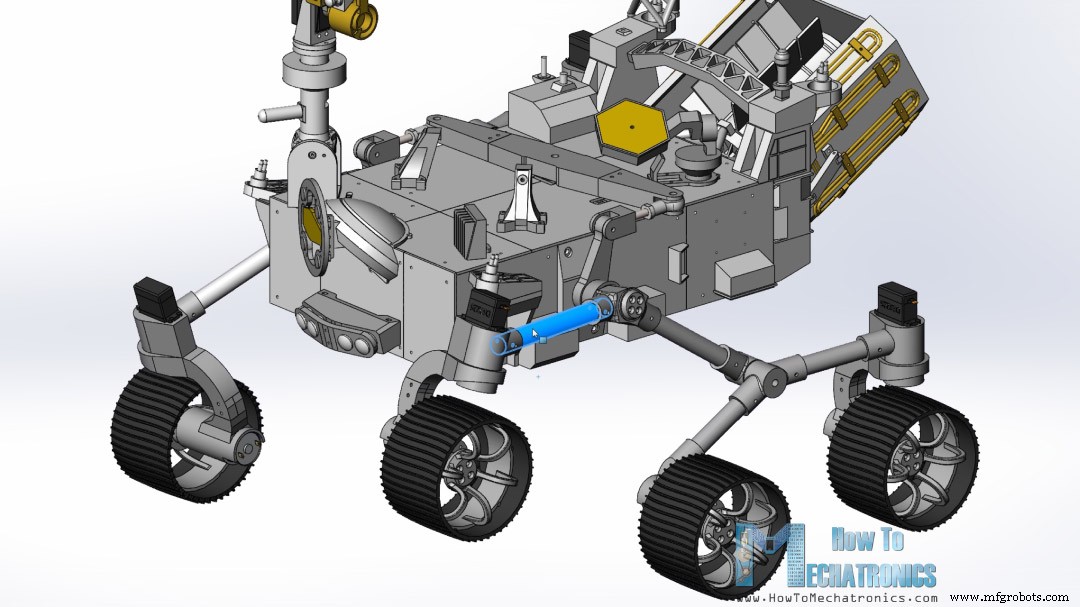
Oke, jadi mari kita kembali ke model dan menjelaskan bagaimana saya mendesain rover. Tujuan saya adalah membuat rover ini terlihat sedekat mungkin dengan Mars Perseverance Rover yang asli. Di situs resmi NASA ada model 3D Mars Perseverance Rover, jadi saya mengunduh dan membukanya di Blender.
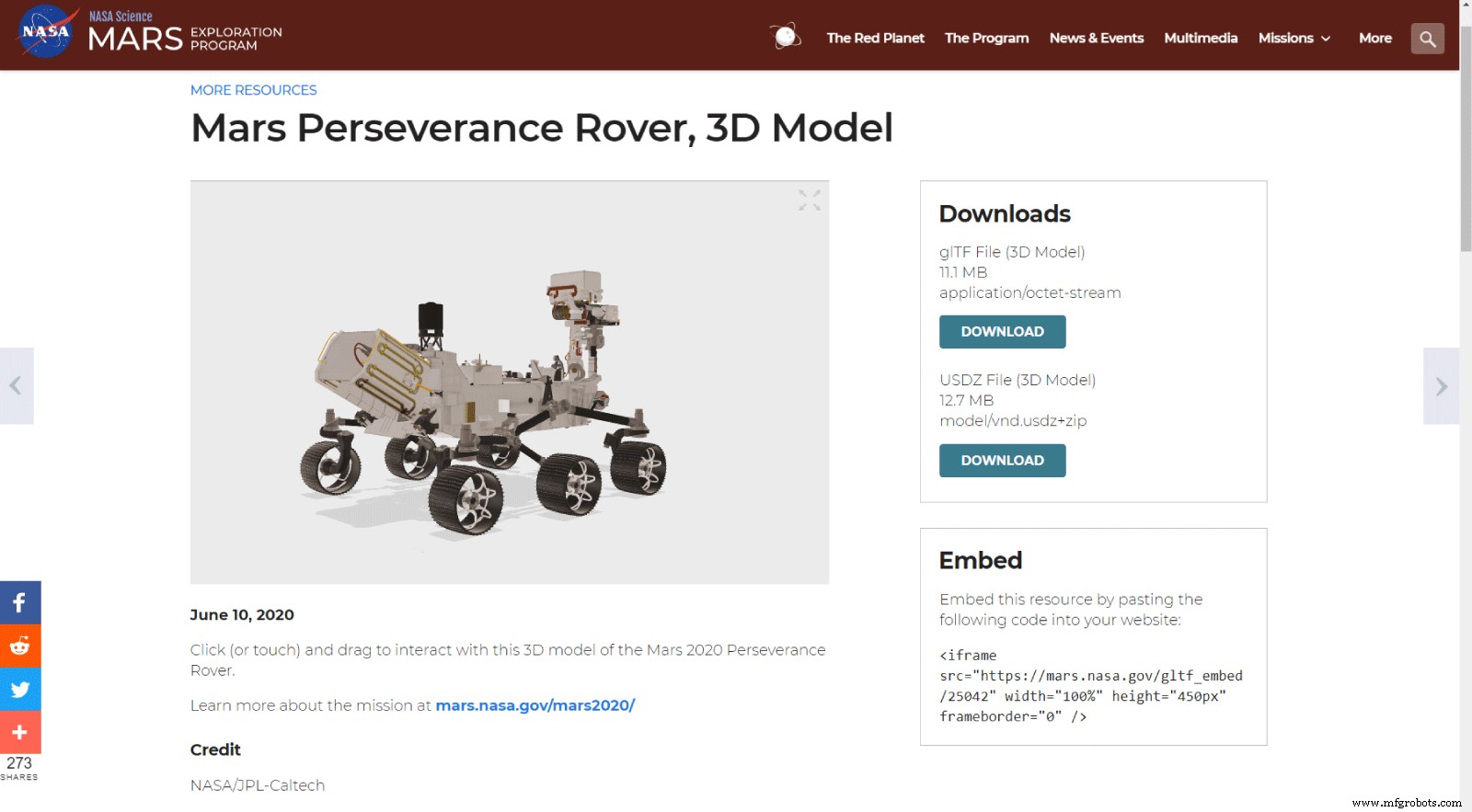
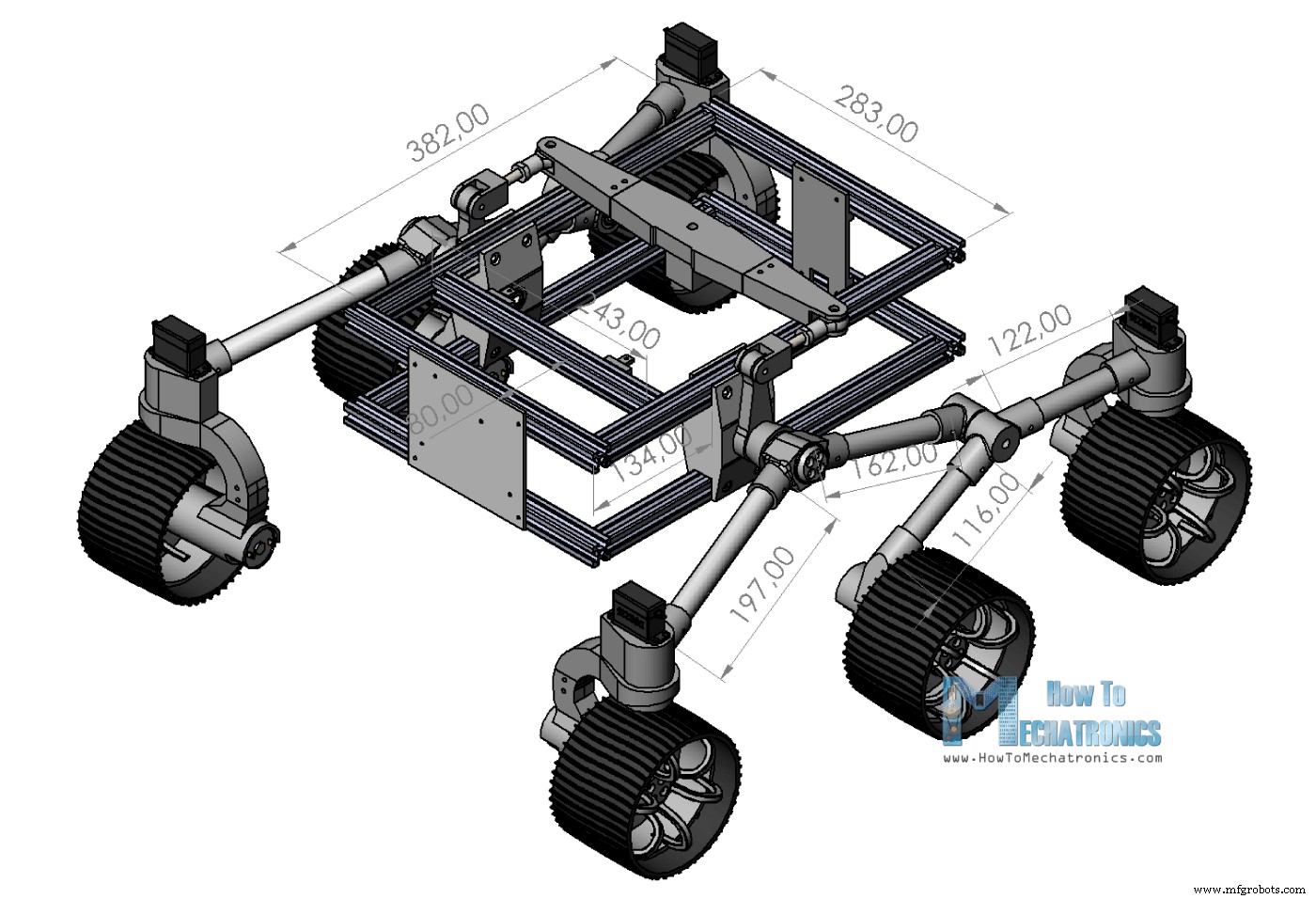
Saya mengambil 3 gambar tampak depan, atas, dan samping rover dan mengimpornya di Solidworks. Saya ingin ukuran roda berdiameter 130mm, jadi saya menskalakan gambar menurut dimensi ini.
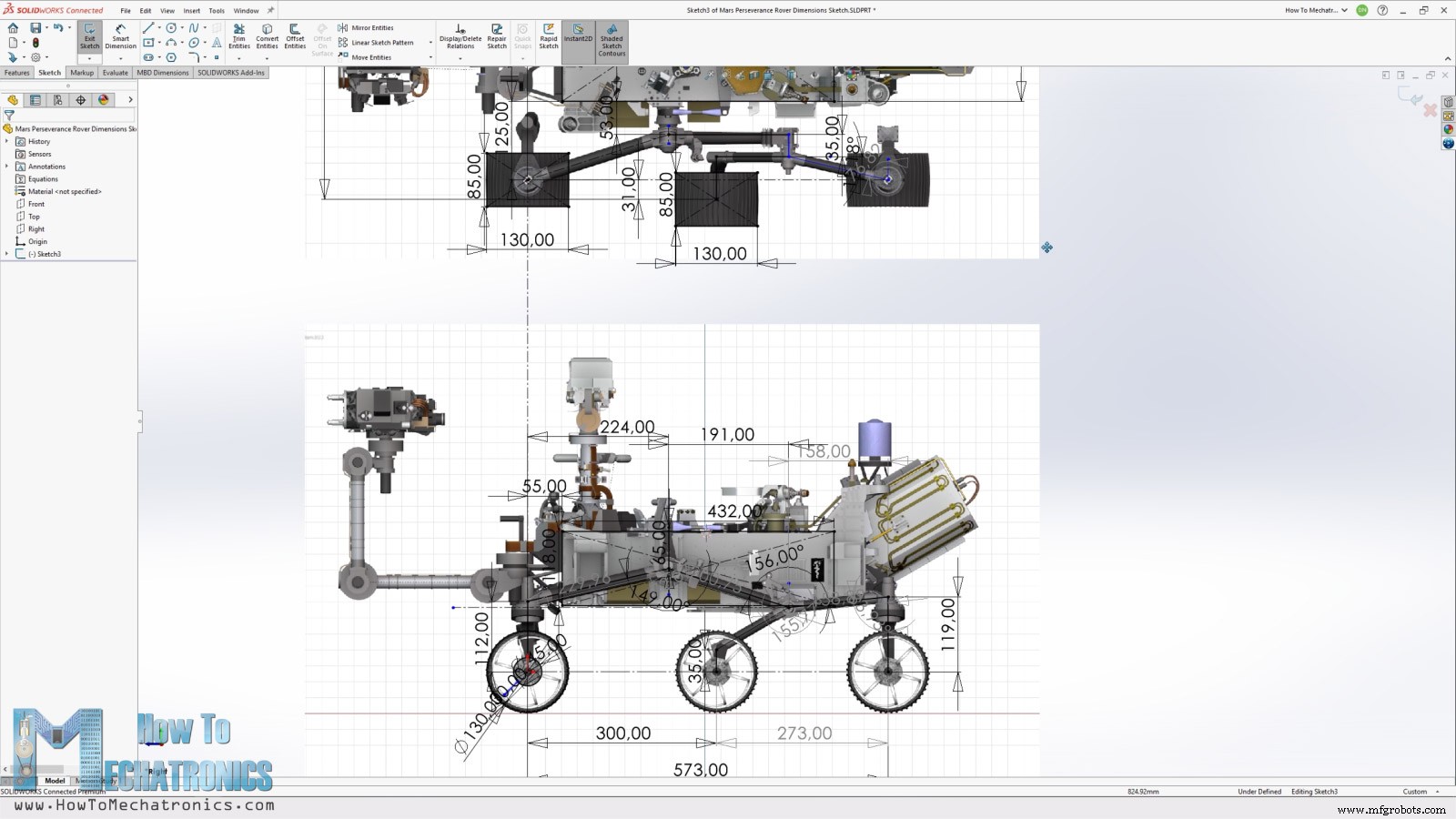
Kemudian dari sini saya mengambil semua dimensi kunci, seperti lebar, panjang, tinggi, jarak antar roda, dimensi suspensi rocker-bogie dan sebagainya.
Sekarang menurut dimensi ini dan motor DC serta servo yang saya rencanakan untuk digunakan, saya merancang bagian bajak sedemikian rupa sehingga dapat dengan mudah dicetak dan dirakit 3D sambil berusaha menjaga tampilannya sedekat mungkin dengan aslinya.
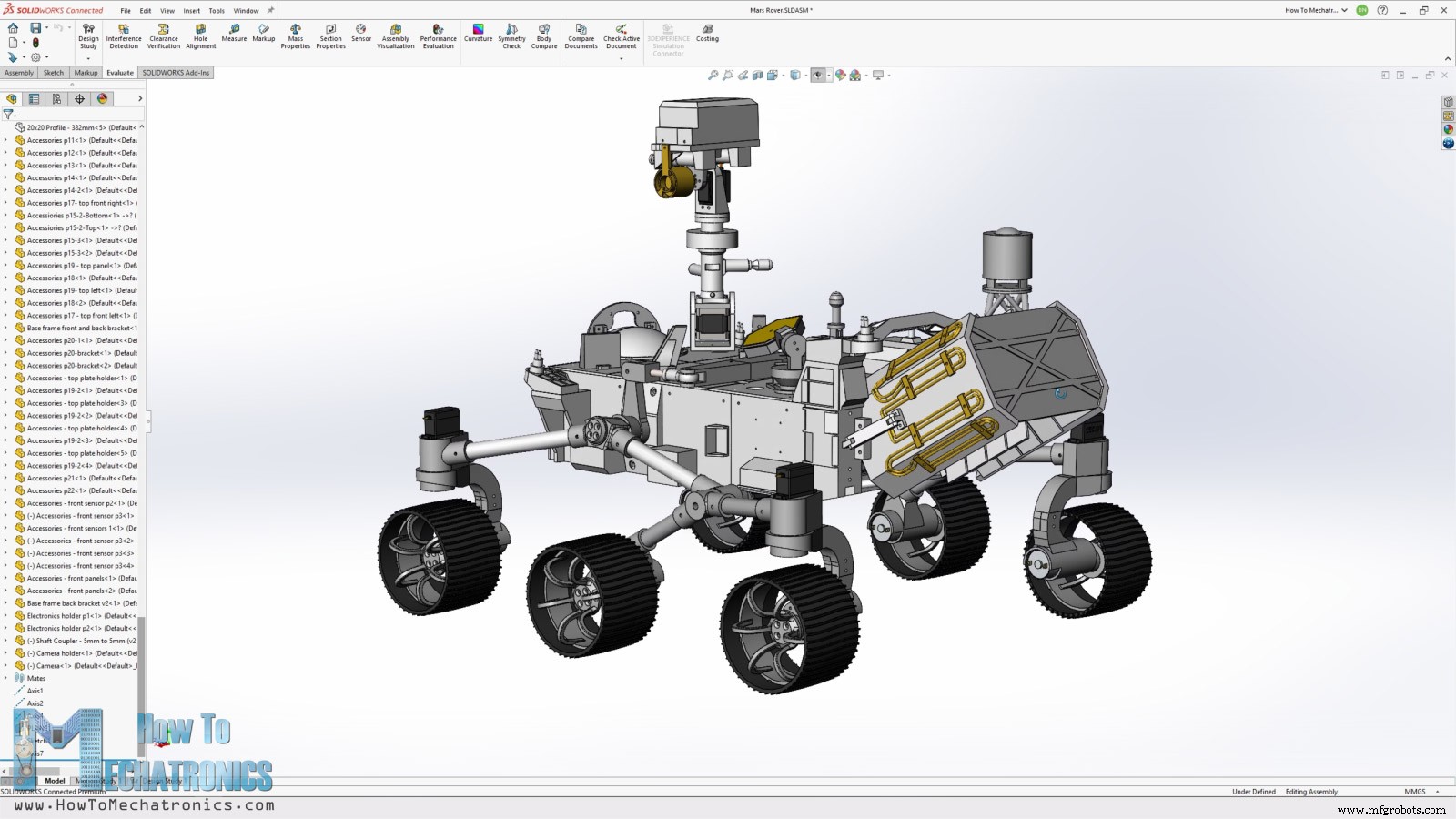
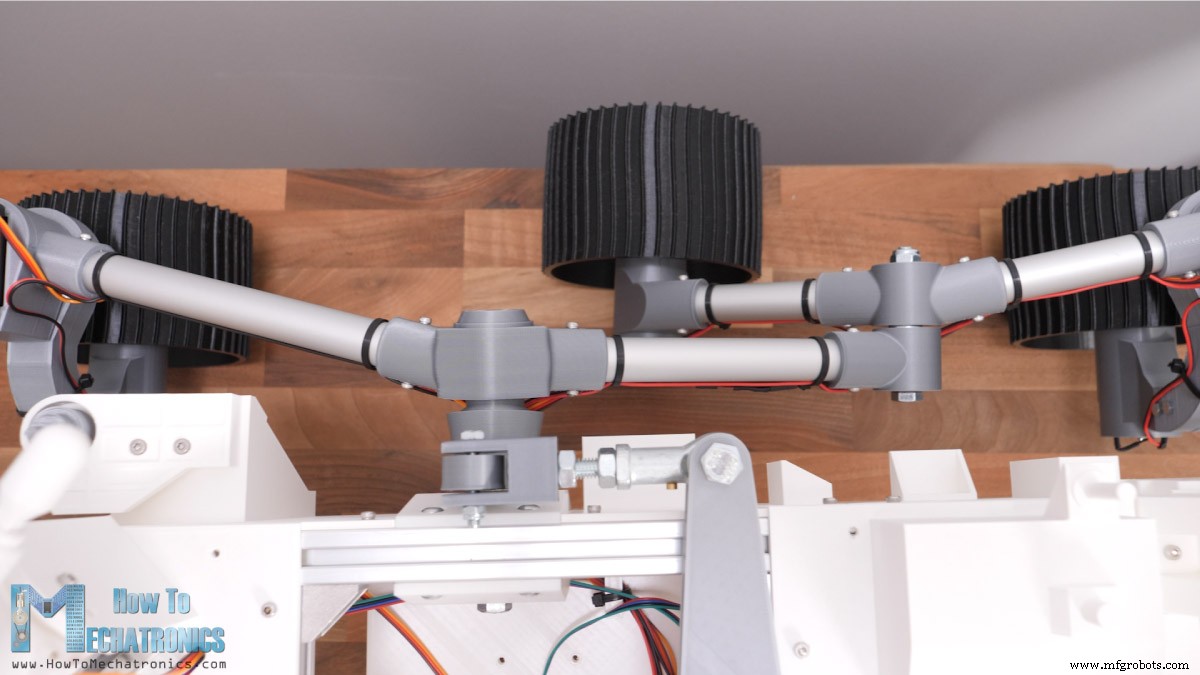
Untuk suspensi rocker-bogie saya menggunakan profil aluminium bulat 20mm, sedangkan untuk rangka dasar saya menggunakan profil aluminium T-slot 20mm.
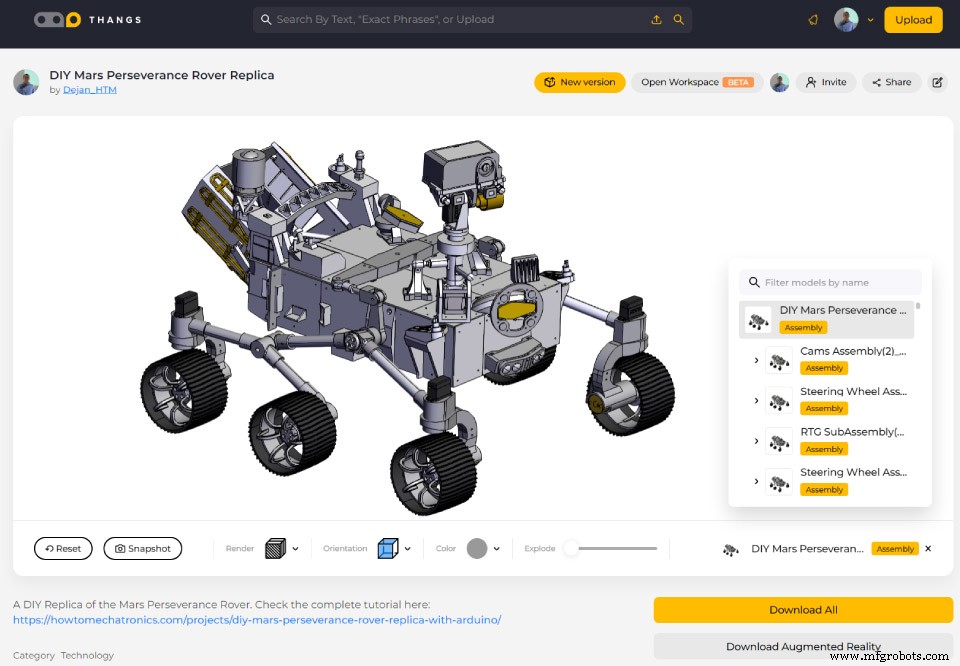
Anda dapat menemukan dan mengunduh model 3D ini, serta menjelajahinya di browser Anda di Thangs.
Dan berikut adalah file STL yang dibutuhkan untuk 3D Printing:
Mencetak 3D Suku Cadang Replika Mars Rover
Untuk pencetakan 3D bagian saya menggunakan Creality CR-10 lama saya serta printer 3D CR-10 V3 baru. Jika Anda ingin mencetak roda dengan bahan yang fleksibel, Anda pasti membutuhkan printer dengan pengekstrusi langsung seperti CR-10 V3.

Kedua printer 3D ini memberikan kualitas cetak yang bagus dengan harga yang relatif terjangkau. Jika Anda tertarik, berikut adalah tautannya sehingga Anda dapat memeriksanya:
- Creality CR-10…… Amazon / Banggood
- Creality CR-10 V3…… Amazon / Banggood / AliExpress
Lihat juga: Osiloskop Anggaran Terbaik untuk Pemula dan Pembuat – Pembaruan 2021
Saat mencetak bagian 3D, penting untuk menggunakan fitur Ekspansi Horizontal di perangkat lunak pengiris Anda. Saya menggunakan nilai -0.1mm. Fitur ini mengkompensasi perluasan filamen saat mencetak.
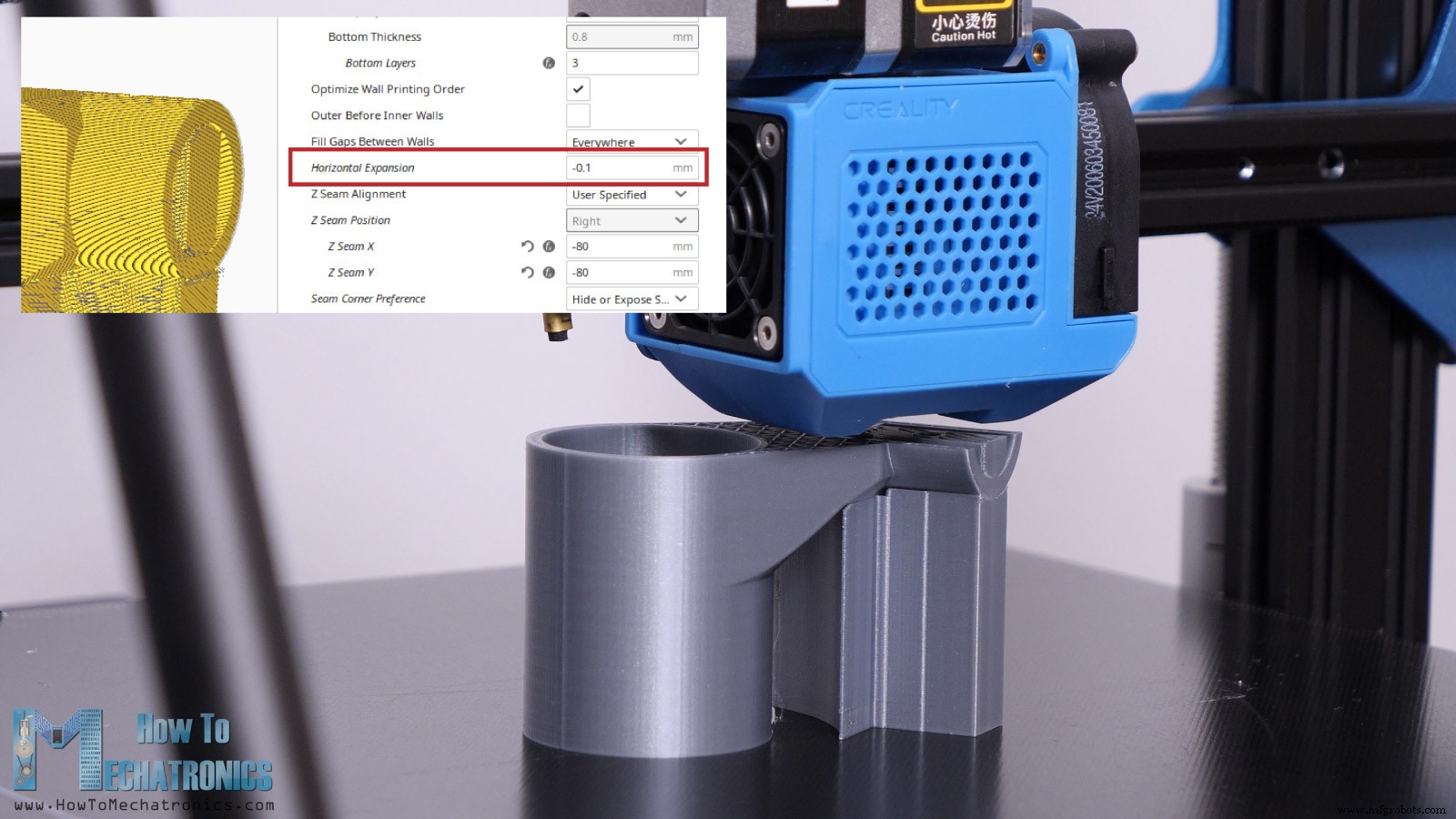
Jika tidak digunakan, misalnya part tersebut memiliki lubang berdiameter 20mm, lubang dari part yang dicetak 3D yang sebenarnya akan menjadi sekitar 19,8mm dan kami tidak akan dapat merakitnya.
Namun demikian, berikut adalah semua bagian cetakan 3D.

Sejujurnya agak gila berapa banyak pencetakan yang ada, tapi itu satu-satunya cara untuk mendapatkan tampilan unik dari rover. Namun, Anda dapat memotong waktu pencetakan menjadi dua jika Anda memilih untuk mencetak hanya bagian fungsional dari penjelajah ini.
Daftar suku cadang untuk Mars Rover DIY
Berikut daftar komponen yang dibutuhkan untuk merakit Mars Rover DIY ini. Daftar komponen elektronik dapat ditemukan di bawah di bagian diagram rangkaian artikel.
- Profil aluminium slot-T 20x20mm ………..Amazon / Banggood / AliExpress
- Kurung sudut profil slot-T ……………..… Amazon / Banggood / AliExpress
- Tabung Bulat Aluminium 20mm ………………. Amazon / AliExpress
- Rod End Joint 8mm ………………………………….. Amazon / Bagus / AliExpress
- 8 x Bantalan 608RS – 8x22x7mm ……..…… Amazon / Banggood / AliExpress
- 8 x Bantalan 626RS – 6x19x6mm ………….… Amazon / Banggood / AliExpress
- 5 x Bantalan 625RS – 5x16x5mm …………… Amazon / Banggood / AliExpress
- M3 Baut berbagai panjang ………………………… Amazon / Banggood / AliExpress
- 4 x Tanduk servo …………………………………………. Amazon / Bagus / AliExpress
Kami juga membutuhkan berbagai panjang baut M4, M5 dan M6. Anda dapat memeriksa daftar lengkap baut dan mur yang dibutuhkan di bawah ini.
Anda juga bisa mendapatkan baut dan mur dari toko perangkat keras setempat.
Merakit Rover
Baiklah, sekarang kita bisa mulai merakit rover. Pertama, kita perlu menyiapkan profil aluminium. Saya menggunakan gergaji tangan logam untuk memotongnya sesuai ukuran.
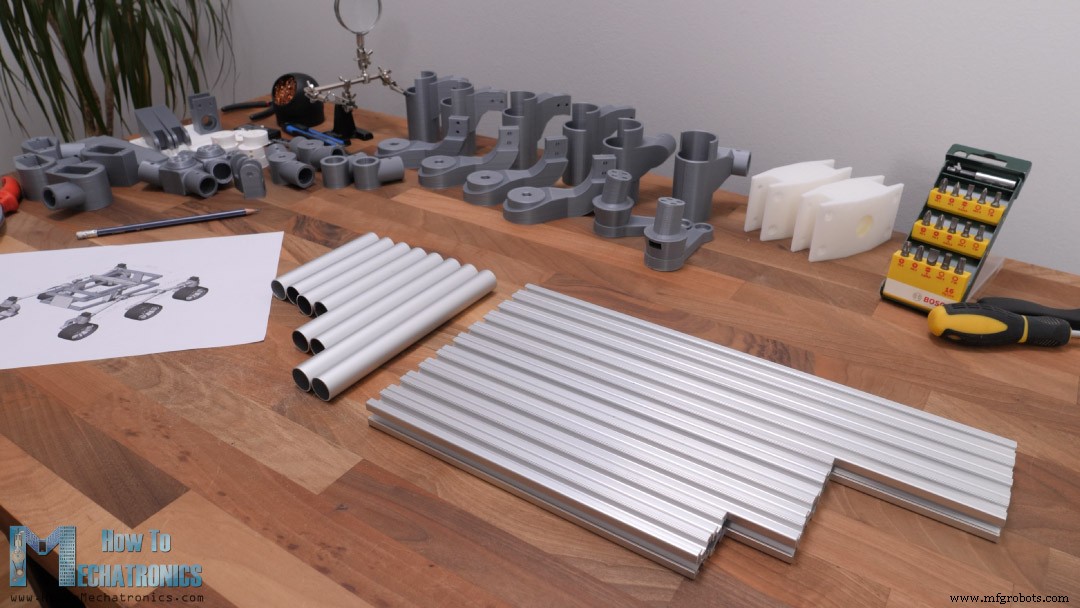
Kami membutuhkan 10 profil T-slot untuk alas dan 8 profil bulat untuk suspensi rocker-bogie dengan dimensi sebagai berikut.
Untuk merakit bingkai profil slot-T kami menggunakan braket sudut slot-T yang sesuai dan beberapa baut dan mur. Setelah bingkai atas dan bawah siap, kita dapat menyelesaikan alasnya dengan memasukkan bagian cetakan 3D sambungan rocker di samping, dan beberapa braket cetak 3D di bagian depan dan belakang. Untuk mengamankannya di tempatnya, kita membutuhkan baut M3 dan mur slot-T.
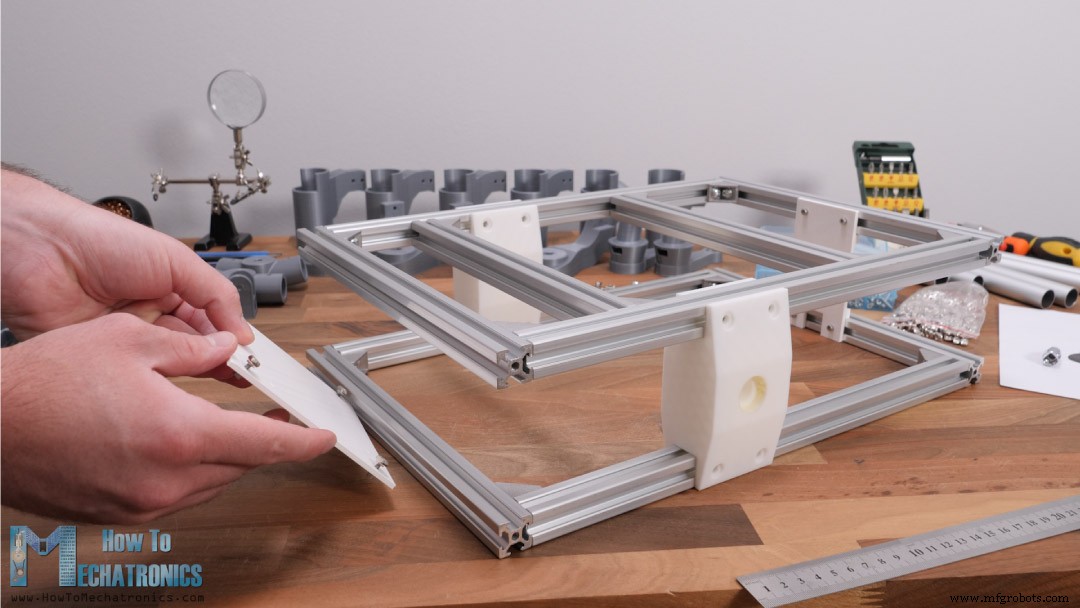
Untuk sambungan rocker saya menggunakan baut dan mur M5. Jarak dari profil depan ke rocker joint harus 134mm.
Merakit Suspensi Rocker-bogie
Selanjutnya, kita dapat memasukkan bantalan utama untuk suspensi rocker-bogie di tempatnya. Kemudian, kami memiliki poros sambungan rocker yang akan dipasang ke alas menggunakan baut M8.
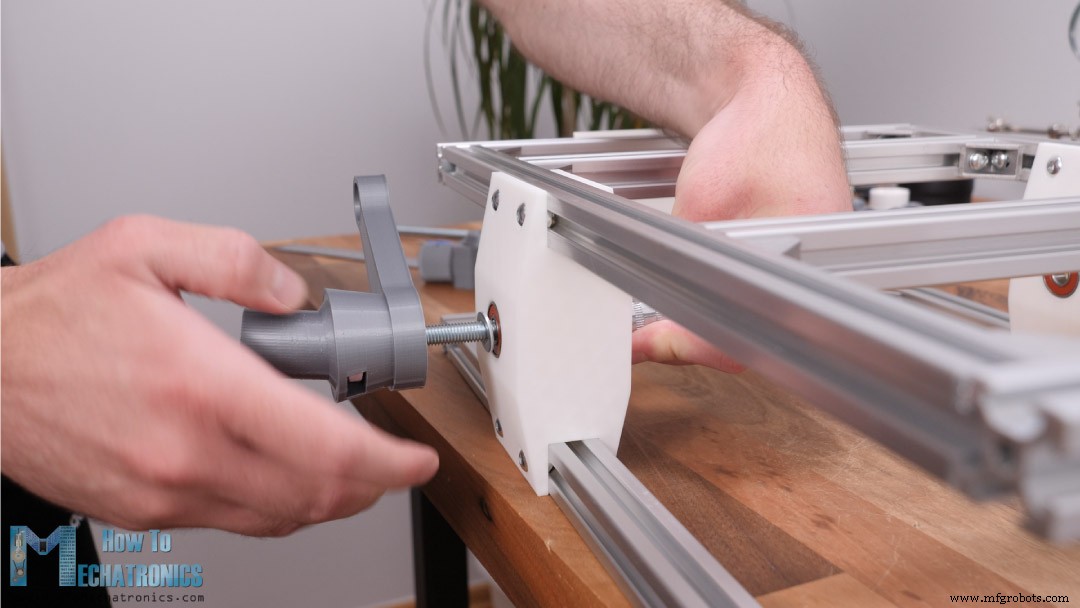
Poros memiliki slot tempat kita dapat memasukkan mur M8 yang digunakan untuk mengamankannya ke alas. Lubang poros adalah 7.5mm sehingga kita memiliki hubungan yang erat antara baut dan poros. Dengan cara ini kita benar-benar memperkuat poros cetak 3D karena baut itu sendiri akan membawa sebagian berat bajak. Ini adalah bagian yang paling tertekan dari seluruh perakitan karena seluruh berat bajak ditopang dengan poros ayun. Cara kami mencetak bagian sangat penting untuk kekuatannya.
Awalnya saya mencetak poros ini dengan cara yang lebih mudah, di mana tidak diperlukan bahan pendukung, tetapi pencetakannya gagal.
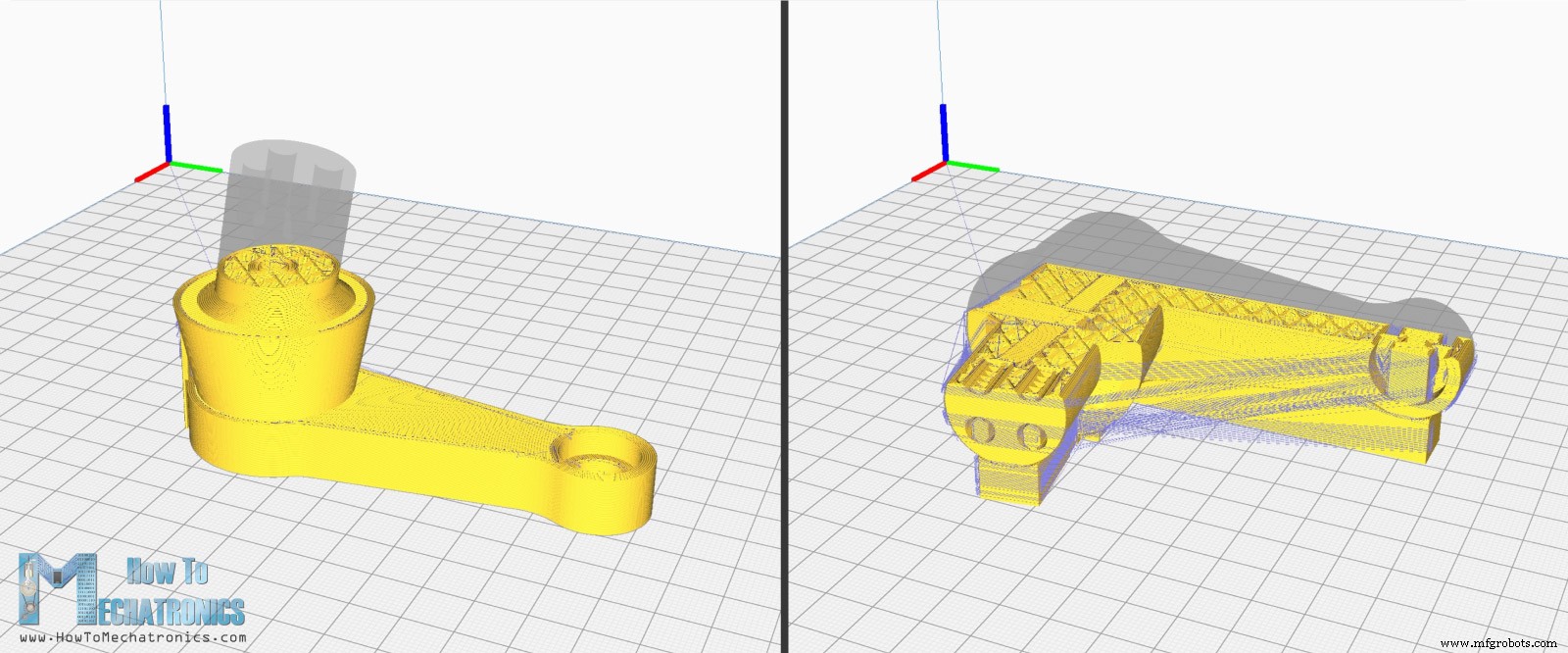
Dengan cara ini gaya tegangan utama bekerja pada lapisan yang tidak begitu kuat, tetapi jika kita mencetak bagian ke samping, di mana gaya tegangan akan bekerja pada kontur dinding, bagian tersebut akan jauh lebih kuat dan tidak akan gagal.
Namun demikian, sekarang kami akan melanjutkan dengan merakit suspensi rocker-bogie bersama dengan sambungan roda dan dudukan motor, dan kemudian kami akan memasang sub-rakitan ini ke poros rocker.
Lubang-lubang pada bagian-bagian tempat profil bundar 20mm diberi dimensi agar pas, jadi dalam beberapa kasus kita perlu menggunakan kertas serak atau kertas amplas untuk membuatnya pas.
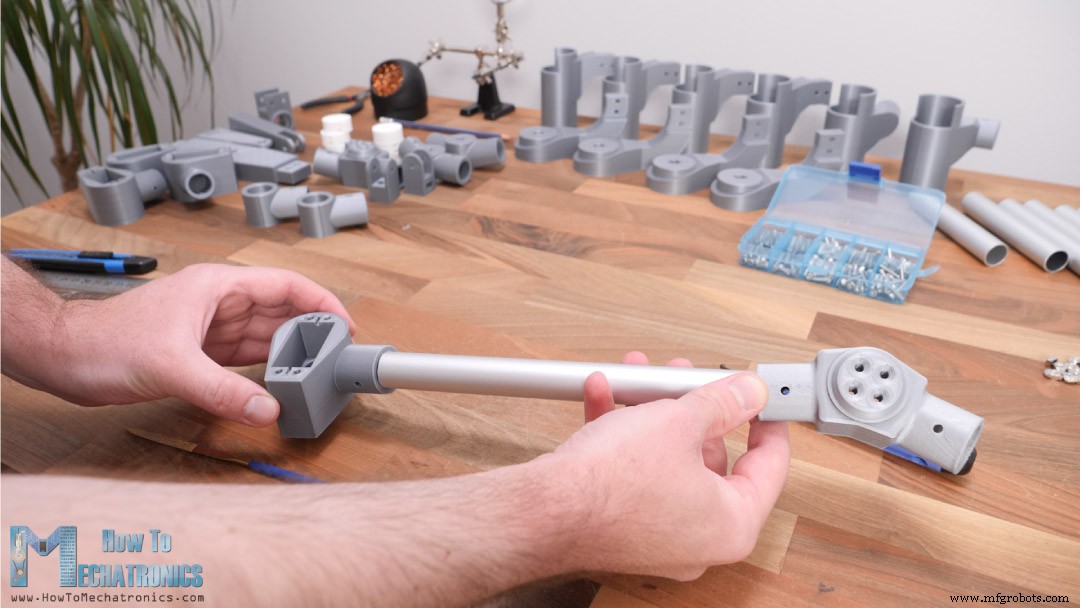
Sekarang untuk merakit bagian-bagian ini dengan benar, kita perlu membuat lubang di profil bundar di lokasi yang tepat. Untuk itu, pertama-tama kita akan menandai garis lurus pada profil.

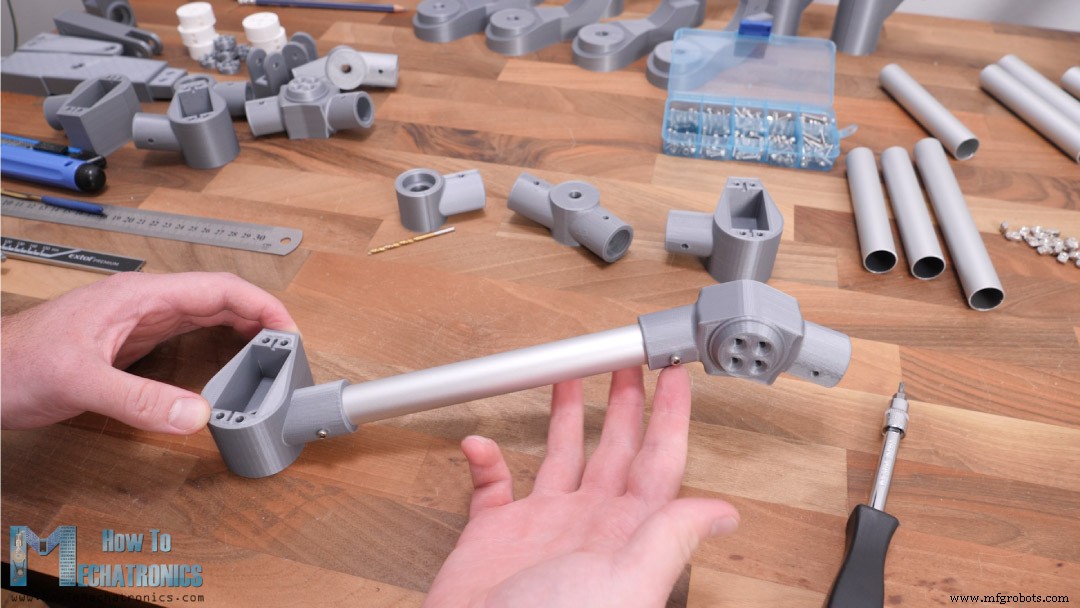
Selanjutnya, kita dapat memasukkan profil ke dalam bagian yang dicetak 3D dengan garis penandaan melewati lubang bagian tersebut. Kemudian kita dapat menandai lokasi di mana kita perlu mengebor profil di kedua sisi bagian itu.

Di sisi berlawanan dari profil, kita perlu mengulangi prosedur yang sama.
Saya mengebor lubang menggunakan bor 2,5 mm, lalu menggunakan baut M3 saya membuat ulir di profil yang akan kita gunakan untuk mengencangkan bagian.

Profil aluminium lebih lembut dari baut sehingga mudah untuk membuat ulir dengan baut itu sendiri. Mengikuti metode pengeboran lubang ini sangat penting agar pada akhirnya semua bagian diposisikan sebagaimana seharusnya relatif satu sama lain.
Untuk sambungan bogie kami juga menggunakan dua bantalan dan baut M8.
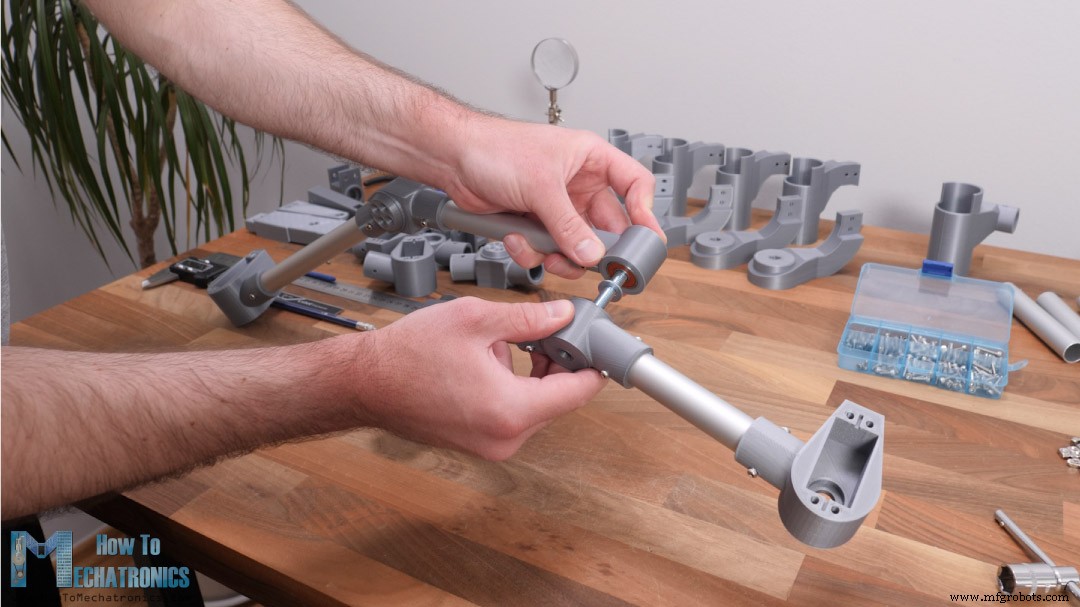
Setelah kami menyelesaikan pengaturan suspensi rocker-bogie, kami dapat melanjutkan dengan merakit sambungan roda kemudi. Bagian sambungan roda kemudi terdiri dari dua bagian yang dibaut menjadi satu.

Untuk sambungan aktual atau sambungan antara bagian pemasangan servo dan bagian pemasangan motor DC kami menggunakan dua bantalan dan baut M6.
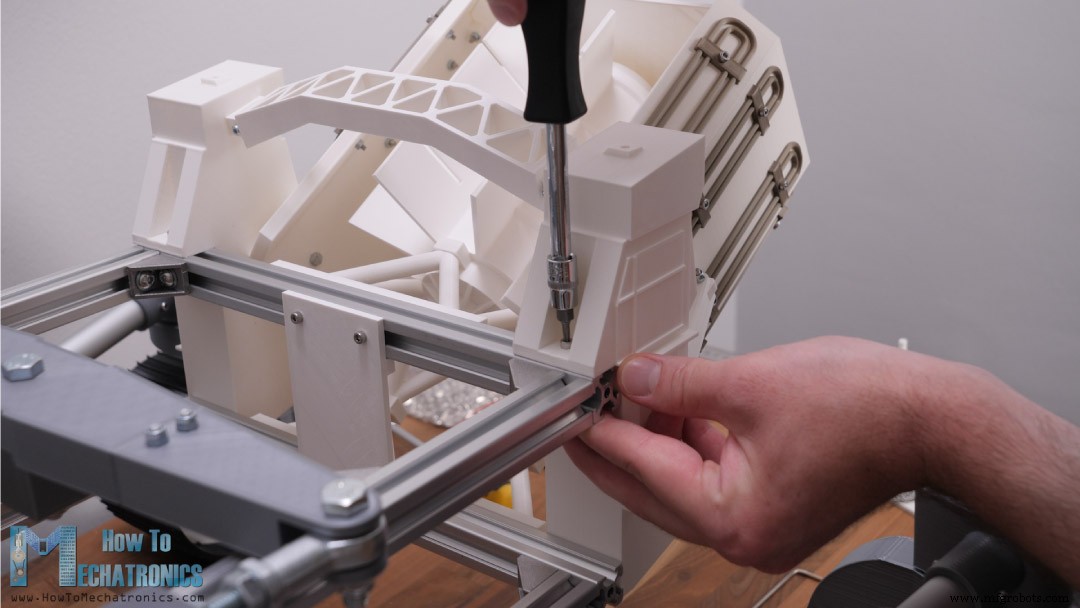
Di sisi atas atau kepala baut kita perlu memasang tanduk servo dan kita melakukannya dengan bantuan coupler cetak 3D ini dan beberapa baut M3.
Coupler memiliki slot heksagonal di mana gerakan servo akan ditransfer ke baut. Di sisi bawah kita dapat mengencangkan bagian sambungan lainnya.

Kami mengamankan koneksi ini dengan mur M6. Ini melengkapi sambungan roda kemudi, meskipun nanti saya akan menyadari bahwa kita sebenarnya perlu menambahkan mur M6 lain di bagian bawah dan mengencangkannya ke mur lainnya.
Kita perlu melakukan ini karena gerakan dari servo ditransfer ke bagian dudukan motor DC menggunakan mur itu sendiri, dan jika tidak dikencangkan dengan mur lain, seluruh sambungan akan terlepas.
Prosedur yang sama berlaku untuk sambungan sudut lainnya. Kita tahu bahwa kita telah menghubungkan semuanya dengan benar jika kita menempatkan rakitan ini pada permukaan yang rata dan ketiga dudukan motor diletakkan rata atau semuanya sejajar satu sama lain.

Tentu saja, kami menggunakan metode yang sama untuk merakit sisi lain. Namun, kita dapat mencatat di sini bahwa meskipun beberapa bagian terlihat identik, mereka bukanlah bagian yang sama tetapi sebenarnya adalah cermin.
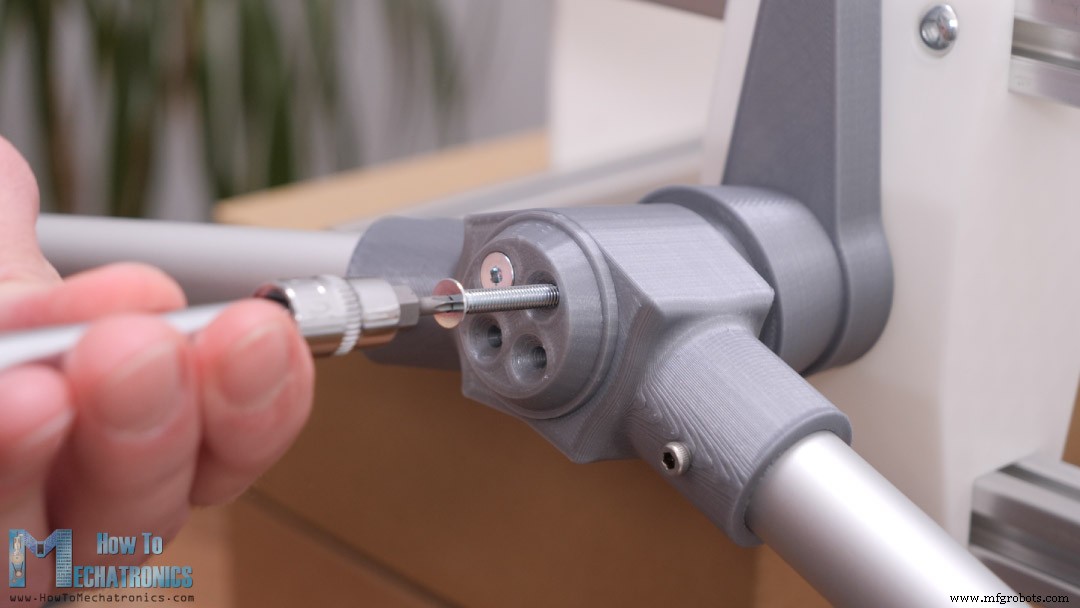
Selanjutnya, kita perlu memasukkan sub-rakitan ini ke poros sambungan rocker pada rangka dasar atau sasis. Sebelum kita melakukannya, kita perlu memasukkan beberapa sisipan kuningan berulir ke dalam poros.

Dengan menggunakan besi solder, kami dapat dengan mudah memasukkannya ke tempatnya, sehingga kami mendapatkan lubang berulir yang baik dan andal untuk mengamankan sub-rakitan suspensi. Kami membutuhkan empat baut M4 untuk tujuan itu.
Setelah kami memasangnya di kedua sisi, kami dapat melihat bahwa sasis jatuh atau berputar dengan bebas. Jadi, kami sebenarnya melewatkan sesuatu agar suspensi rocker-bogie bekerja dengan baik, dan itulah perbedaannya.

Dengan diferensial, kedua rocker terhubung satu sama lain dan sasis rover. Dengan konfigurasi ini, ketika satu sisi berputar, yang lain berputar ke arah yang berlawanan sehingga memberikan kontak roda yang kurang lebih sama.
Sasis akan memiliki sudut pitch rata-rata dari kedua rocker.
Berikut adalah semua bagian yang diperlukan untuk merakit diferensial.
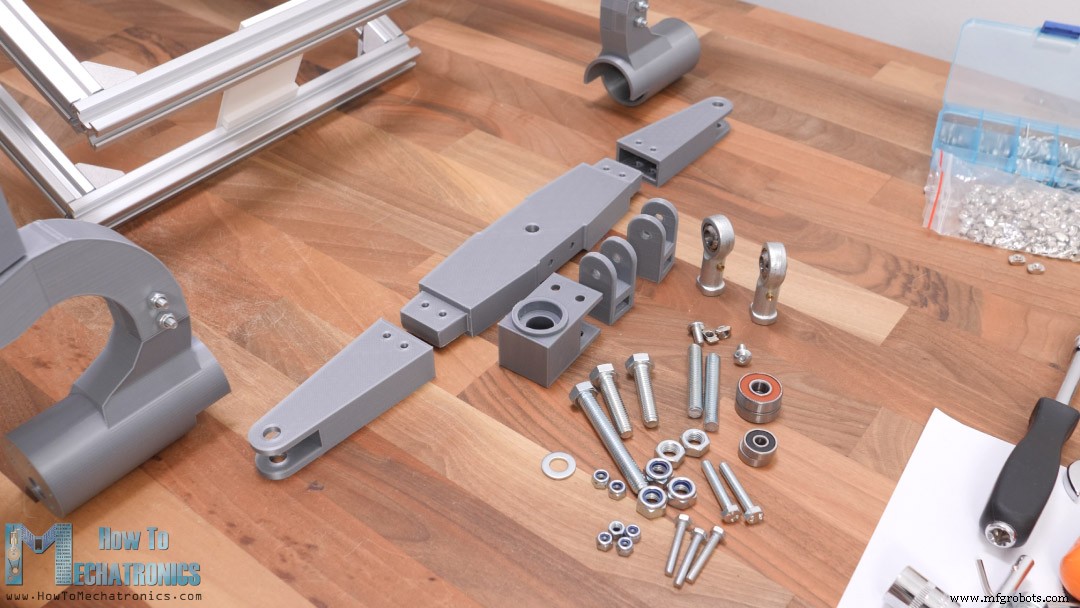
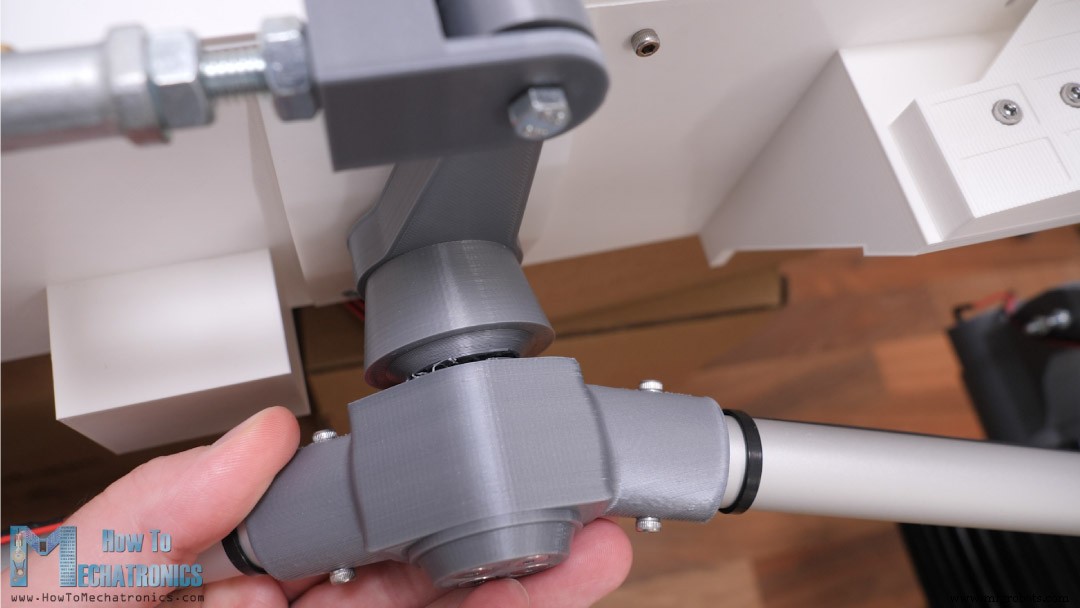
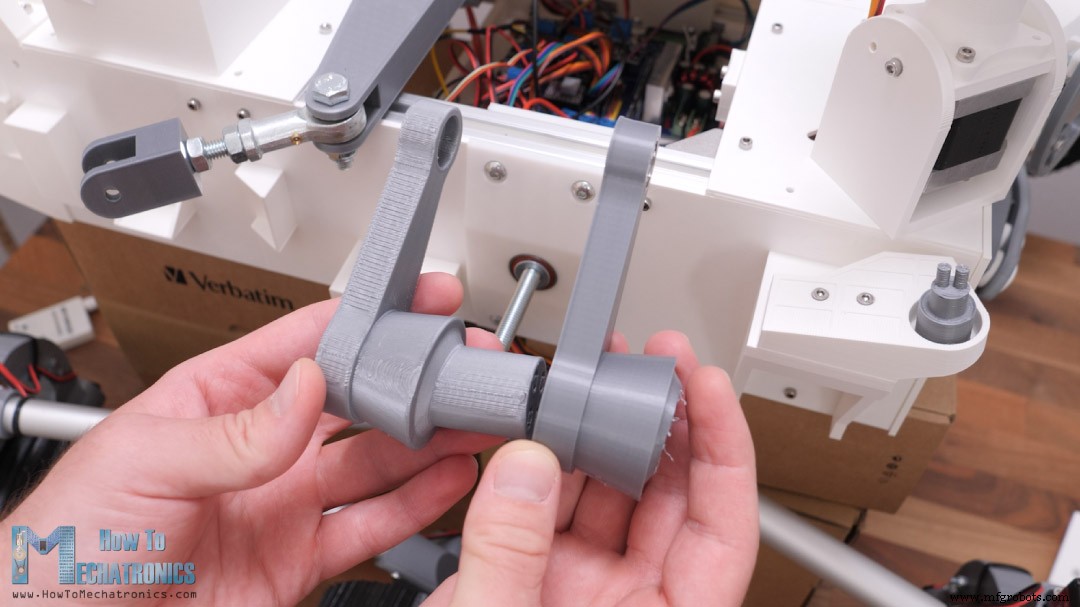
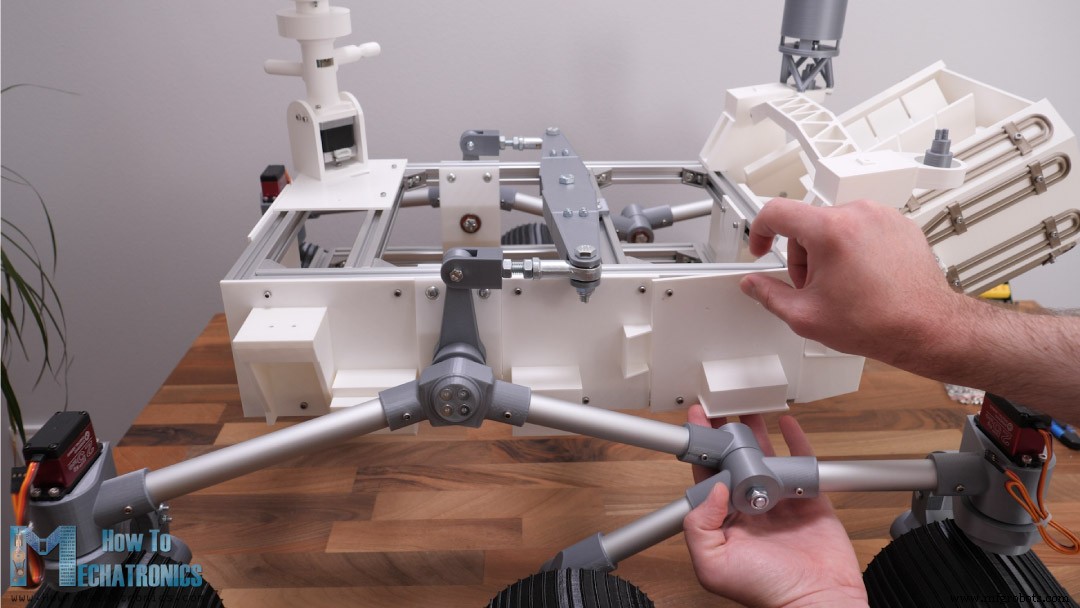
Karena bilah diferensial cukup panjang, saya membuatnya dari tiga bagian yang dibaut menjadi satu sehingga kami dapat mencetaknya secara 3D bahkan pada printer 3D yang lebih kecil. Batang diferensial akan berputar di tengah sasis dengan sambungan yang terbuat dari dua bantalan dan baut M8.

Untuk menghubungkan diferensial dengan rocker, kita membutuhkan sambungan bola ujung batang. Saya menggunakan sambungan bola ujung batang M8 dan kami juga membutuhkan batang ulir M8 dengan panjang 50mm. Batang berulir masuk ke bagian cetakan 3D yang memiliki mur M8 di satu sisi, dan di sisi lain masuk ke sambungan bola ujung batang.
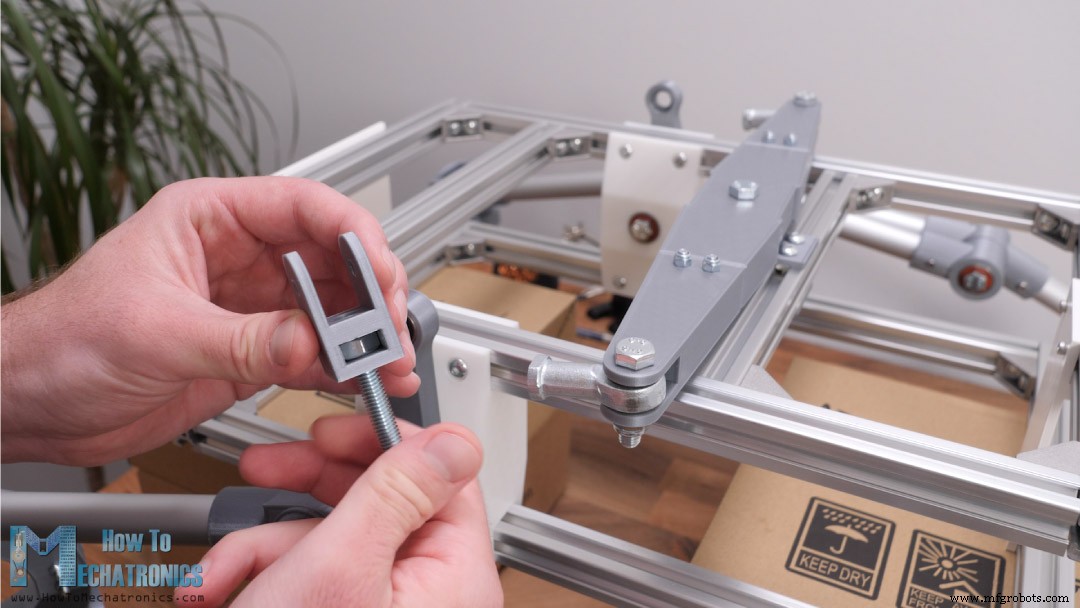
Di sini kita perlu menyesuaikan jarak antara tautan diferensial cetak 3D dan ujung batang yang perlu sekitar 20mm agar sasis tetap horizontal. Untuk menghubungkan tautan diferensial dengan tuas ayun, kami menggunakan dua bantalan dan baut M5.

Kami mengulangi prosedur ini untuk sisi lain juga dan dengan ini suspensi rocker-bogie kami selesai. Ketika satu sisi naik, yang lain turun dan sebaliknya.

Ini menyediakan semua roda untuk bersentuhan dengan tanah sepanjang waktu. Sasis hanya berjalan setengah gerakan kaki, atau sasis memiliki sudut kemiringan rata-rata dari kedua rocker.
Lihat juga:Operasi Otomatis Platform Lengan Robot Arduino dan Roda Mecanum
Merakit Motor untuk Mars Rover
Baiklah, jadi selanjutnya kita bisa melanjutkan dengan memasang motor DC. Motor yang saya gunakan berdiameter 37mm, beroperasi pada 12V dan memiliki gearbox dengan output 50RPM.

Meskipun kemudian saya menyadari bahwa 50RPM terlalu banyak untuk rover ini, jadi saya sarankan untuk memilih versi 20 atau 10 RPM.
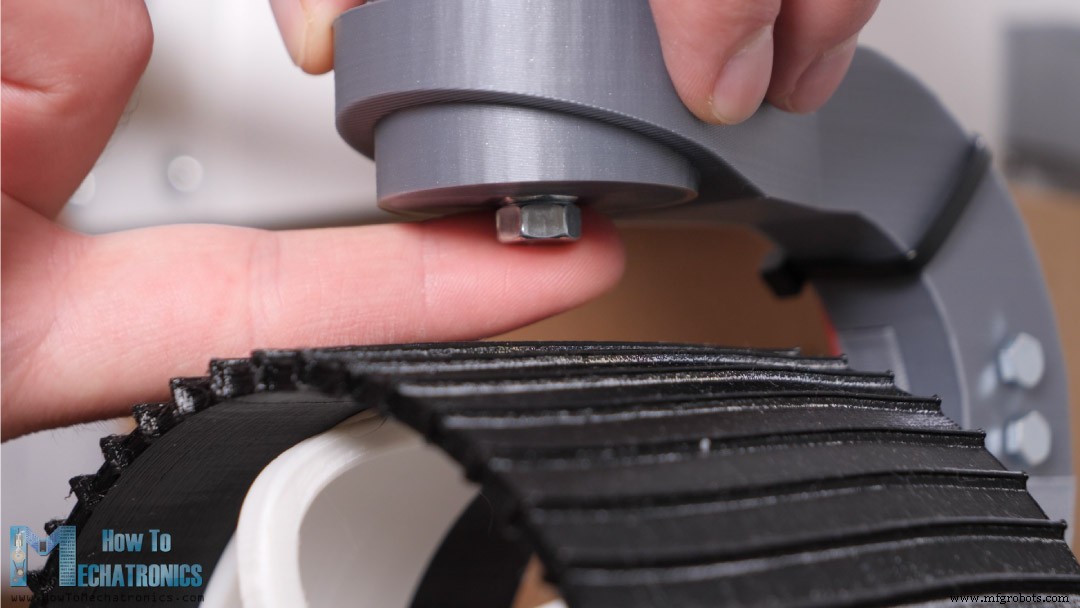
Untuk memasang roda ke motor, saya membuat skrup poros ini.

Di sini kita perlu memasang insert berulir M3 yang akan digunakan untuk mengamankan coupler ke poros, dan juga mur M4 untuk mengamankan roda ke coupler. Saat memasukkan mur, kita juga harus menambahkan sedikit lem agar tetap di tempatnya dengan kuat, atau gunakan sisipan berulir sebagai gantinya.
Selanjutnya, kita bisa memasang roda. Roda terdiri dari dua bagian. Salah satunya adalah roda yang saya cetak dengan filamen fleksibel, tetapi tidak harus demikian, dan yang lainnya adalah pelek yang dicetak dengan PLA biasa.

Pelek memiliki slot yang masuk ke dalam roda sehingga tenaga dari motor ditransfer ke roda. Kita dapat menambahkan beberapa tetes lem pada slot agar lebih aman. Terakhir, kita bisa memasangkan roda ke poros skrup atau motor DC menggunakan 4 baut M4.

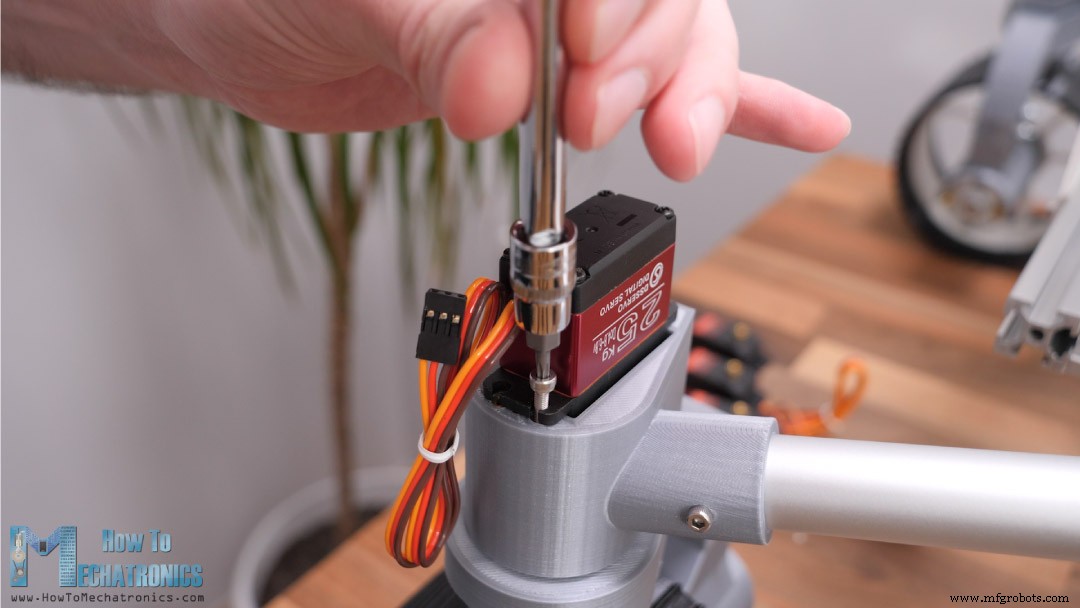
Baiklah, jadi selanjutnya kita bisa memasang motor servo kemudi. Saya menggunakan servos digital torsi tinggi dengan torsi 25kgcm dan tegangan operasi dari 4,8 hingga 6,8V. Untuk mengamankan servos di tempatnya, kami menggunakan empat baut M3 yang masuk ke sisipan berulir M3 di bagian cetakan 3D pemasangan servo.
Merakit Unit Kamera
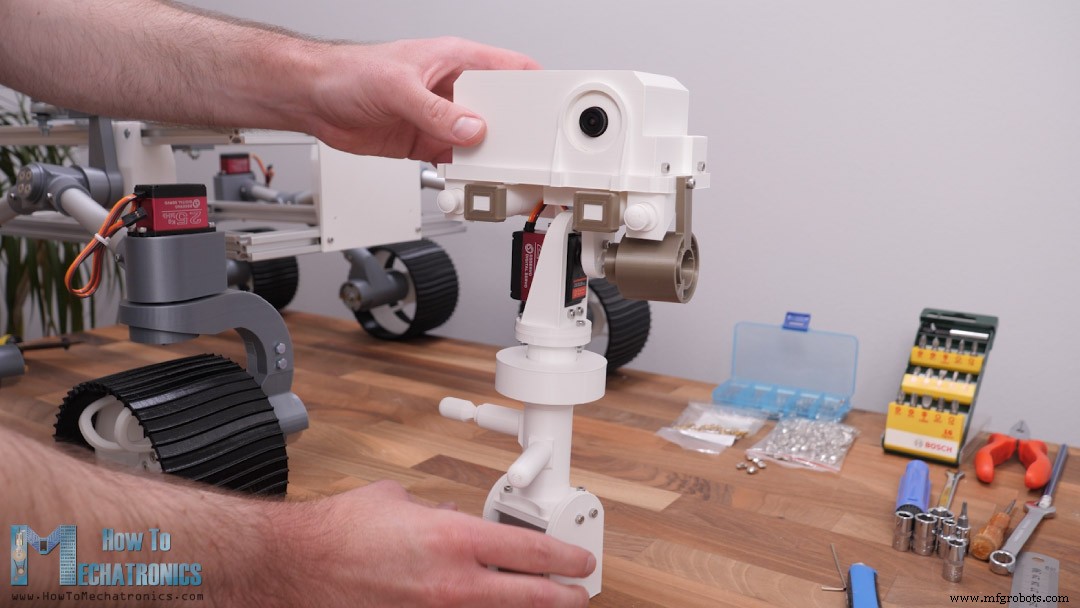
Selanjutnya, kita bisa merakit unit kamera. Untuk panning kamera, saya memutuskan untuk menggunakan motor stepper NEMA 17, tetapi Anda dapat mengubahnya menggunakan motor jenis lain di sini.

Gerakan motor dipindahkan ke bagian atas menggunakan batang berulir M5 yang dihubungkan ke motor dengan coupler poros cetak 3D, dan di sisi lain kami menggunakan bantalan dan dua mur untuk mengamankan batang berulir ke elemen bergerak. Untuk memiringkan kamera, saya menggunakan servo yang sama dengan yang kami gunakan untuk roda kemudi.

Banyak bagian di sini pada unit kamera tidak berfungsi dan mereka hadir hanya untuk mencocokkan penampilan rover yang sebenarnya. Untuk merakit bagian-bagian ini, kita membutuhkan berbagai baut M3 dan beberapa sisipan berulir.

Namun, saya juga akan memasang kamera FPV asli di sini. Saya membuat dudukan khusus untuk itu sehingga saya bisa memasangnya di rumah unit kamera. Kamera ini mudah diakses dari atas yang kami tutup dengan penutup snap-fit. Berikut tampilan akhir unit kamera.
Saya memasang seluruh sub-rakitan kamera ini di sudut kanan depan sasis.

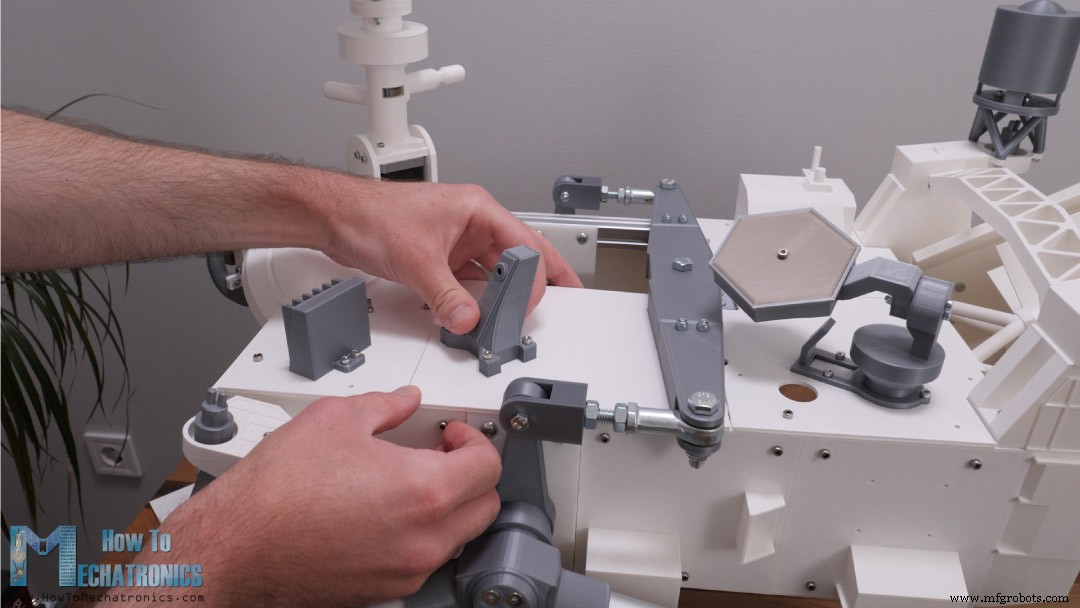
Pada titik ini, kita dapat melanjutkan dengan merakit sisa bagian cetakan 3D, yang sebenarnya tidak berfungsi tetapi hanya untuk mencocokkan tampilan bajak asli, atau menghubungkan komponen elektronik dan membuat bajak bekerja. Saya memutuskan untuk merakit semua bagian cetakan 3D terlebih dahulu, lalu mengerjakan elektroniknya.
Merakit sisa rover
Seperti yang saya katakan, bagian-bagian berikut ini hanya untuk mencocokkan penampilan rover jadi saya tidak akan membahas detail cara merakitnya. Anda dapat melihat bagaimana segala sesuatu perlu dihubungkan dari model 3D.
Saya benar-benar berusaha keras merancang bagian-bagian ini, memperhatikan detail agar semuanya terlihat bagus.
Bagian-bagian ini juga cukup besar dan membutuhkan waktu untuk mencetaknya secara 3D.
Berikut adalah tampilan singkat bagaimana saya menginstalnya.
Dua panel atas terakhir di tengah rover dirancang agar pas di rover.
Mereka benar-benar akan bertindak sebagai tudung yang dapat dengan mudah dilepas karena komponen elektronik akan ditempatkan di area ini.
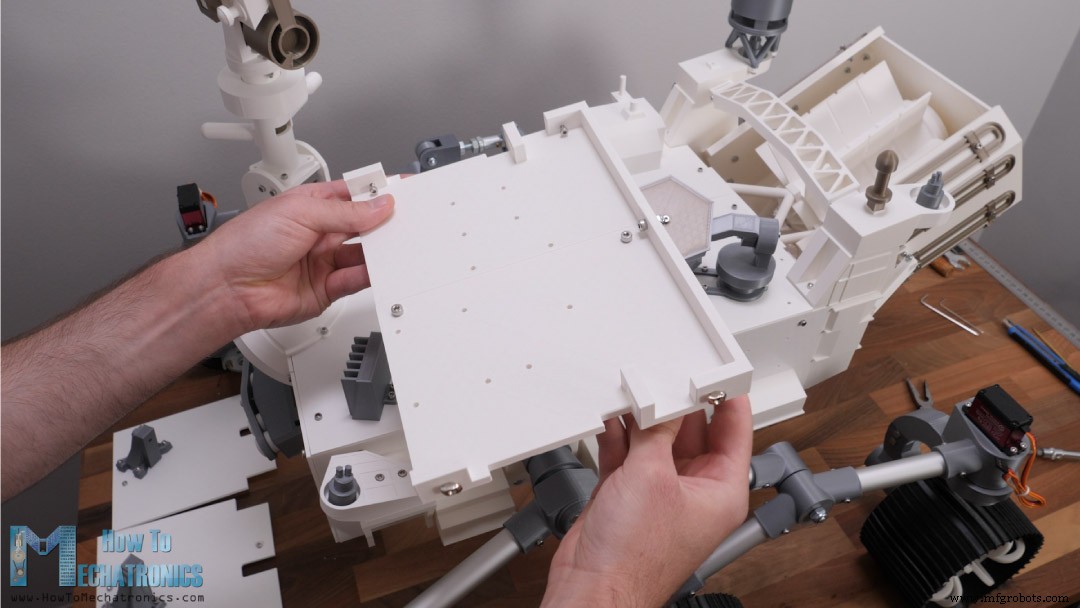
Dudukan komponen elektronik terbuat dari dua bagian cetakan 3D yang dibaut bersama dan dipasang ke rangka bawah sasis.
Elektronik
Baiklah, jadi sekarang kita bisa melanjutkan dengan elektronik. Pertama, kita perlu mengukur berapa banyak kawat yang kita butuhkan untuk setiap motor. Saya menyolder kabel langsung ke motor karena saya tidak memiliki konektor motor yang tepat. Saya menggunakan tabung panas menyusut untuk mengisolasi konektor.

Dengan bantuan beberapa ikatan zip, kami dapat memandu dan menjaga kebersihan kabel.

Untuk motor servo kita dapat menggunakan kabel ekstensi servo untuk memperpanjang kabel ke kompartemen elektronik. Bagian dudukan elektronik memiliki slot tempat kita dapat melewatkan kabel untuk mendapatkan bagian tengah rover.
Secara keseluruhan, menurut saya kabel yang keluar cukup bersih dengan kabel yang lewat di belakang bagian yang terlihat.
Lihat juga: Robot SCARA | Cara Membuat Robot Berbasis Arduino Sendiri
Diagram Sirkuit Mars Rover DIY
Mari kita lihat diagram sirkuit rover ini sekarang, dan lihat bagaimana semuanya perlu dihubungkan.
Anda bisa mendapatkan komponen yang dibutuhkan untuk proyek ini dari tautan di bawah ini:
- Motor DC 12V 37mm …….……………….…
- Servo Digital 25kg …………………………….
- Driver Motor DC DRV8871 ……………….
- Motor Stepper – NEMA 17……………………
- A4988 Stepper Driver………………..…..…
- Arduino MEGA…………………….…..………
- Konverter Buck DC-DC …………………….
- Baterai LiPo 3S ………………………..………..
- Konektor XT60 ………………………
- Pemancar RC FLYSKY …………………..
- Kamera FPV dan Pemancar Video…. Amazon / Bagus / AliExpress
- Penerima FPV sesuai pilihan Anda
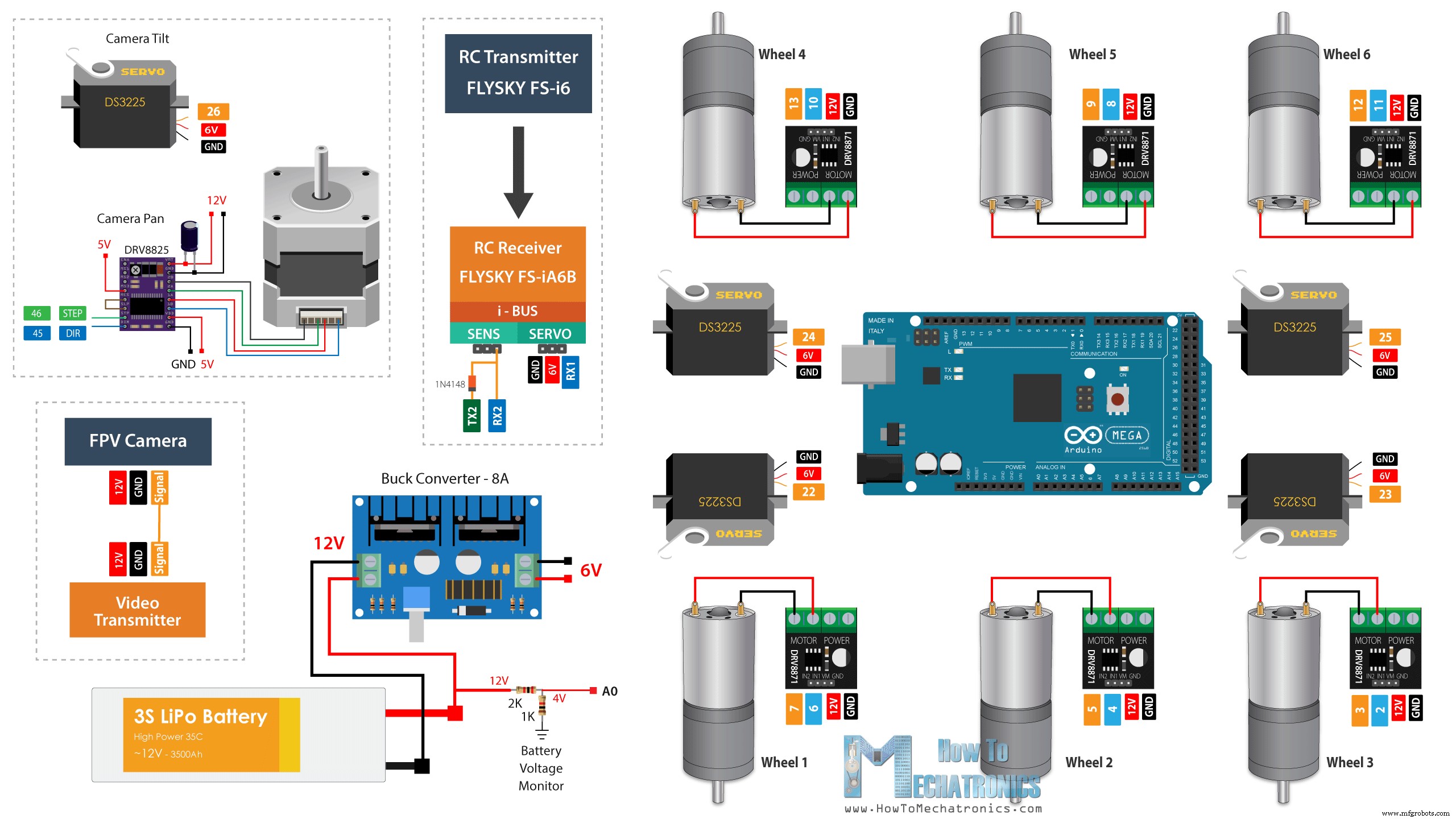
Untuk menggerakkan enam motor DC, kami menggunakan enam driver motor DC DRV8871 yang mendukung kontrol PWM dan arus puncak hingga 3,6A. Tegangan operasi motor DC adalah 12V, dengan arus pengenal 1A dan arus macet 3A. Untuk memberi daya pada rover, saya menggunakan baterai LiPo 3S yang menyediakan sekitar 12V.
Servo di sisi lain membutuhkan 4,8 hingga 6,8V, jadi oleh karena itu kita membutuhkan konverter DC-ke-DC yang akan mengubah 12V menjadi 6V. Konverter harus mampu menangani arus sekitar 8A, karena servos yang kami gunakan cukup kuat dan memiliki arus macet sekitar 2A. Untuk menggerakkan motor stepper unit kamera, kita dapat menggunakan driver stepper A4988 atau DR8825. Dengan menggunakan dua resistor, kita dapat membuat pembagi tegangan sederhana yang melaluinya kita dapat memantau tegangan baterai.
Penerima RC adalah daya dengan 6 volt yang berasal dari konverter uang, dan kamera FPV dan pemancar videonya ditenagai dengan 12V dari baterai.
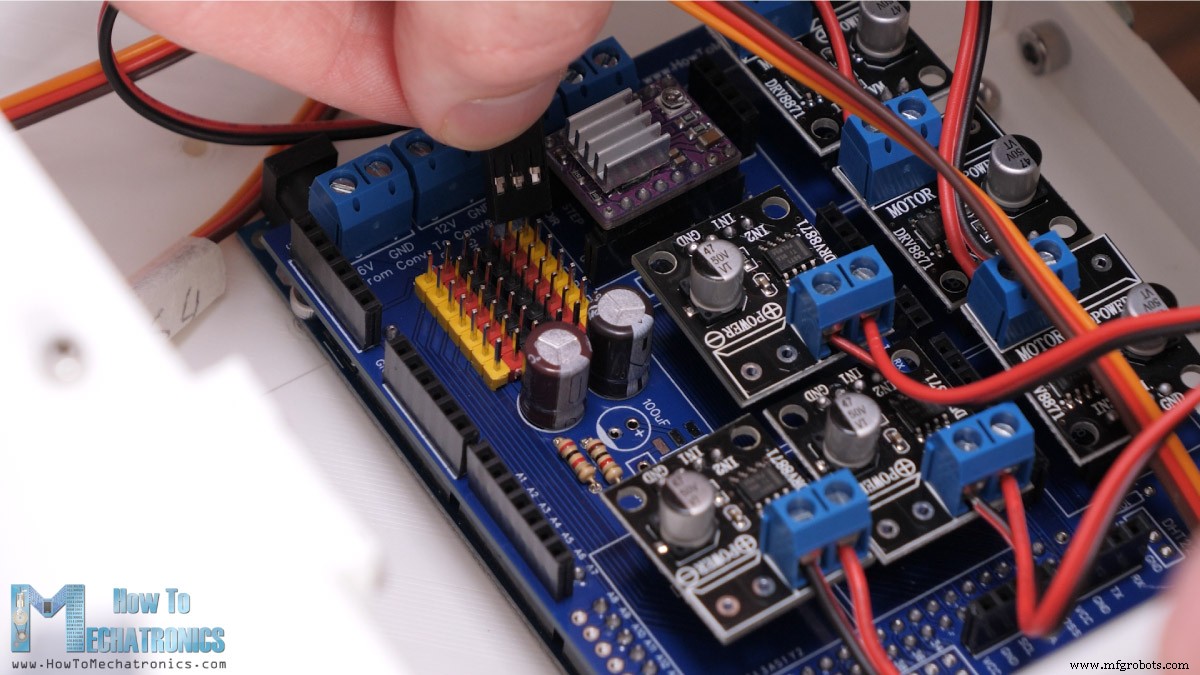
PCB Kustom
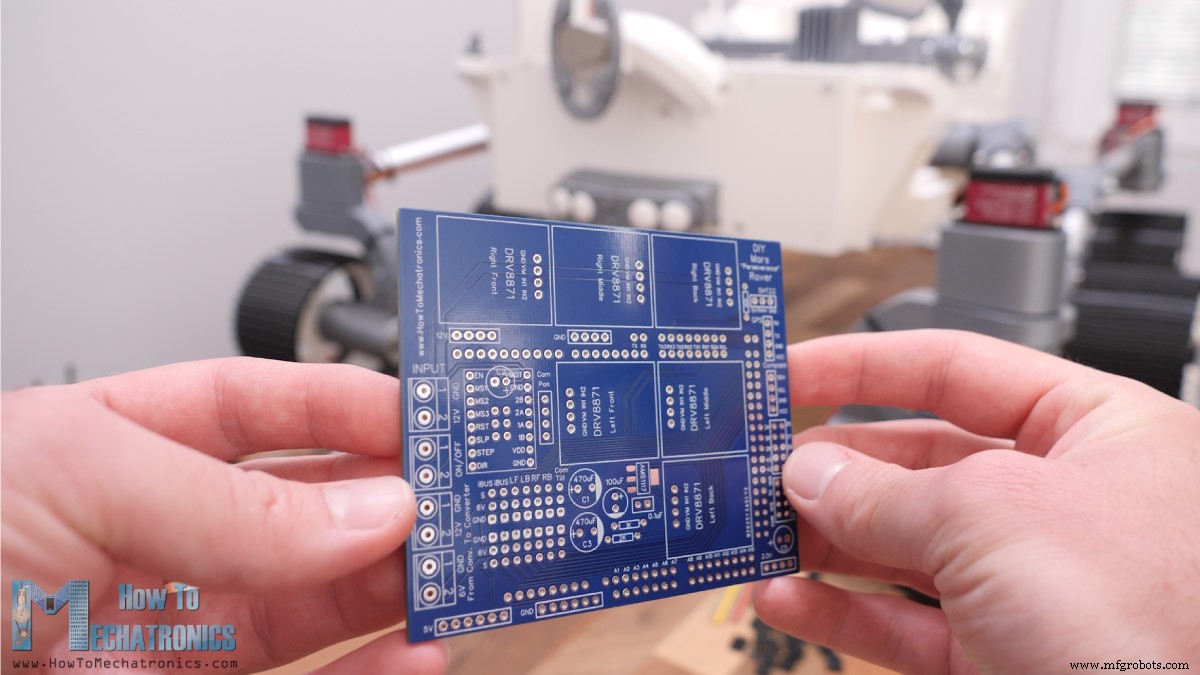
Untuk menjaga komponen elektronik tetap teratur, saya merancang PCB khusus untuk penjelajah Mars DIY ini.
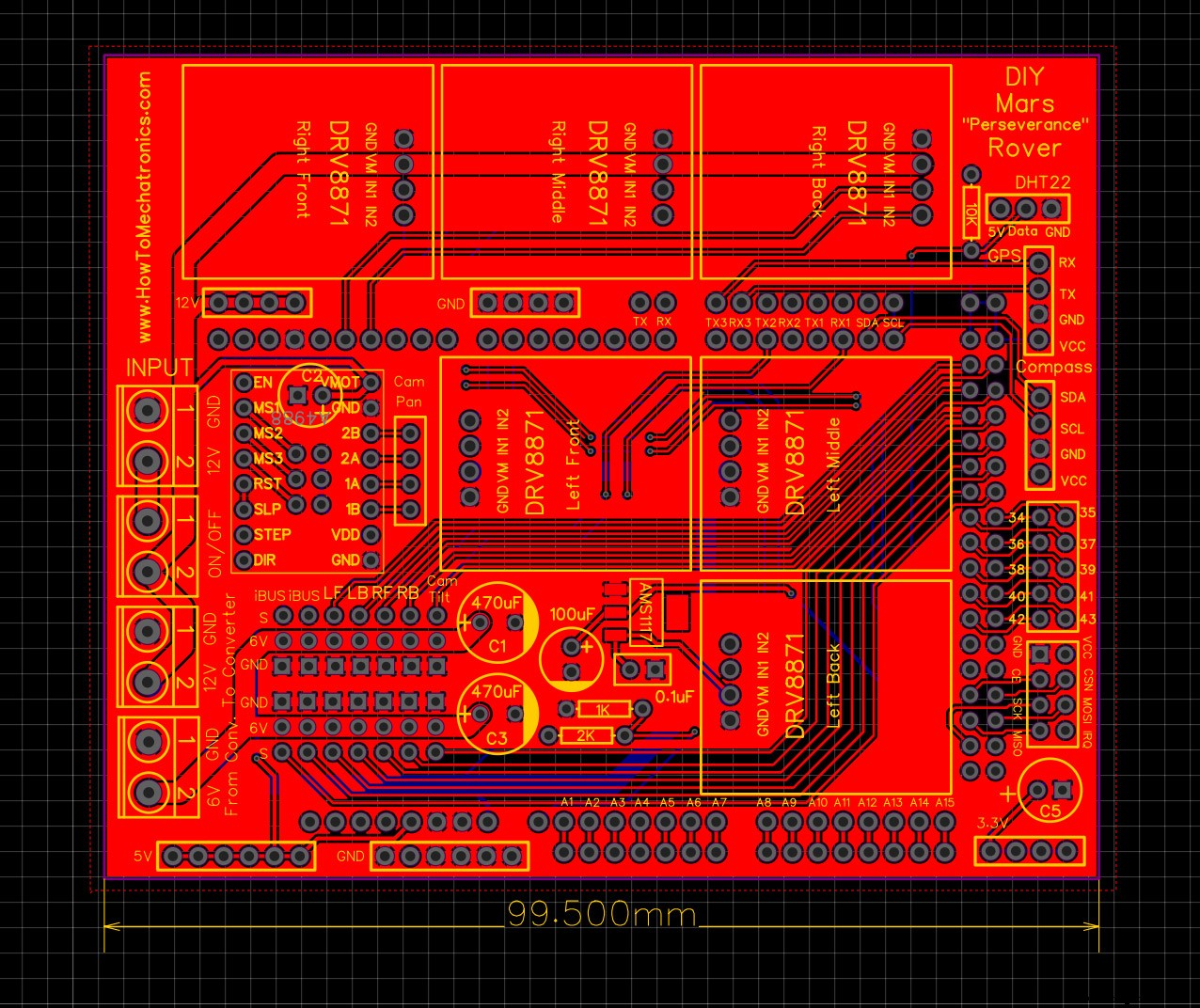
PCB ini sebenarnya akan bertindak sebagai pelindung Arduino MEGA karena kita dapat langsung menghubungkannya di atas papan Arduino MEGA. Selain driver motor, saya menyertakan regulator tegangan 3.3V dan koneksi NRF24L01 khusus jika Anda ingin mengontrol rover menggunakan modul itu, serta koneksi untuk sensor DHT22, kompas, I2C, komunikasi serial, 12V, 5V , 3.3V dan koneksi GND. Sebenarnya, saya menguji PCB ini di masa depan untuk meningkatkan fungsionalitas rover.
Saya memesan PCB dari PCBWay. Di sini kita cukup mengunggah file Gerber, memilih properti PCB kita, dan memesannya dengan harga yang wajar.
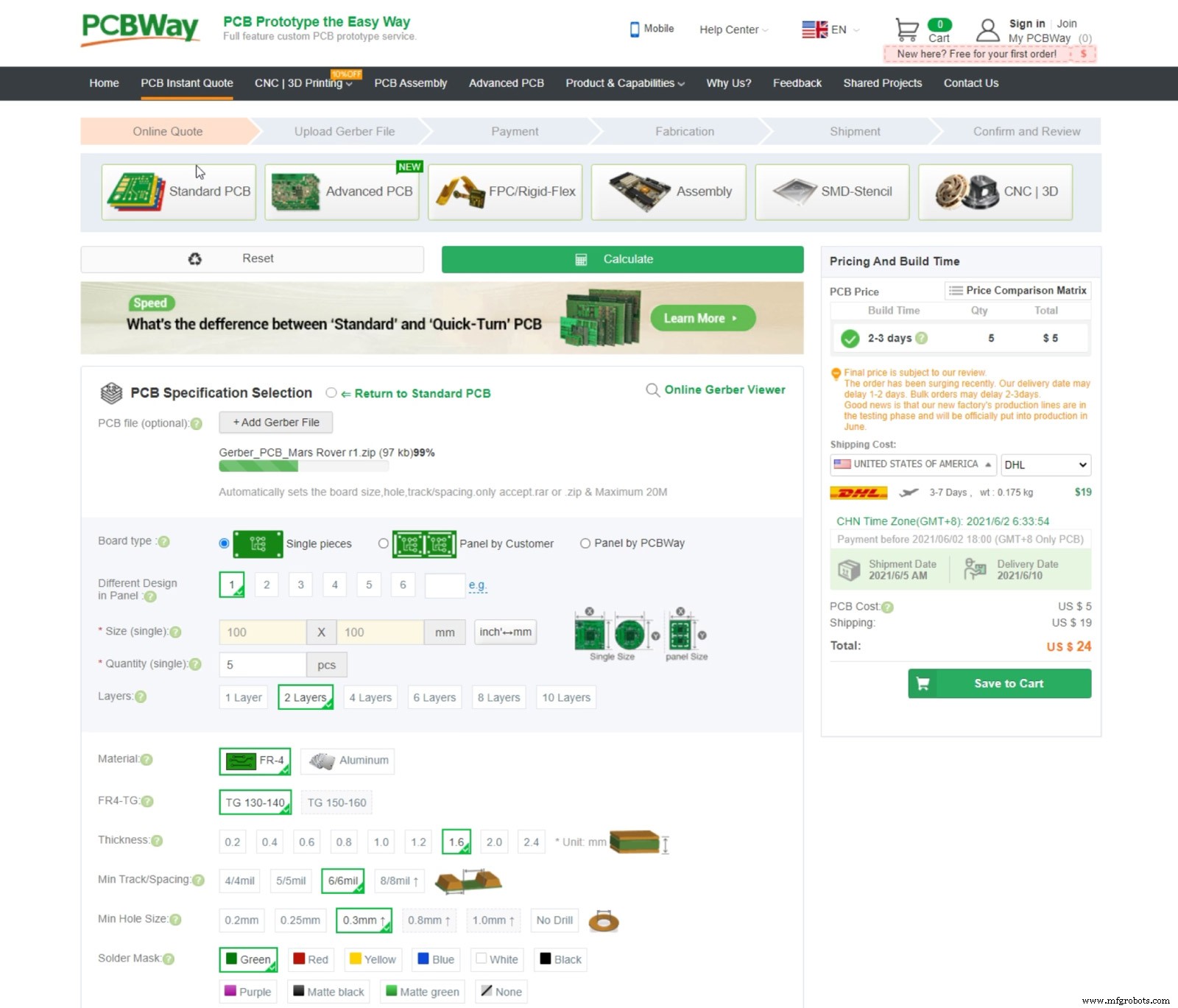
Saya tidak mengubah properti default apa pun kecuali warna PCB yang saya pilih menjadi biru agar sesuai dengan papan Arduino. Anda dapat mengunduh file Gerber di sini di bawah ini, atau dari komunitas berbagi proyek PCBWay tempat Anda juga dapat memesan PCB secara langsung.
Di sini Anda dapat mengunduh file Gerber untuk PCB Mars Rover DIY ini:
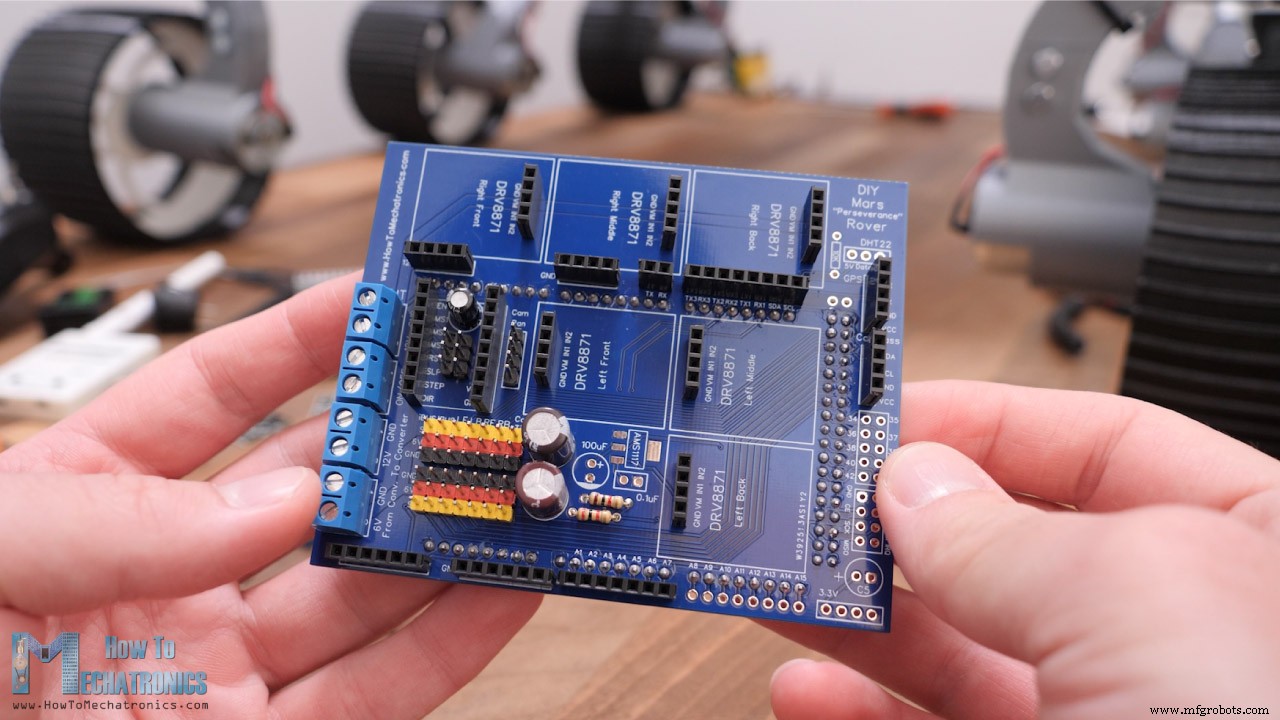
Namun demikian, setelah beberapa hari PCB tiba. Kualitas PCB sangat bagus, dan semuanya sama persis dengan desainnya.
Merakit PCB cukup mudah karena semuanya diberi label. Saya mulai dengan menyolder pin header di bagian bawah PCB, untuk koneksi Arduino MEGA dan kemudian dilanjutkan dengan sisi atas. Saya sebenarnya menggunakan pin header untuk semua koneksi, karena memberikan fleksibilitas untuk melakukan perubahan jika sesuatu tidak berfungsi dengan baik. Saya tidak menyolder regulator tegangan 3.3V serta beberapa pin Arduino gratis, karena saya tidak akan menggunakannya sekarang.
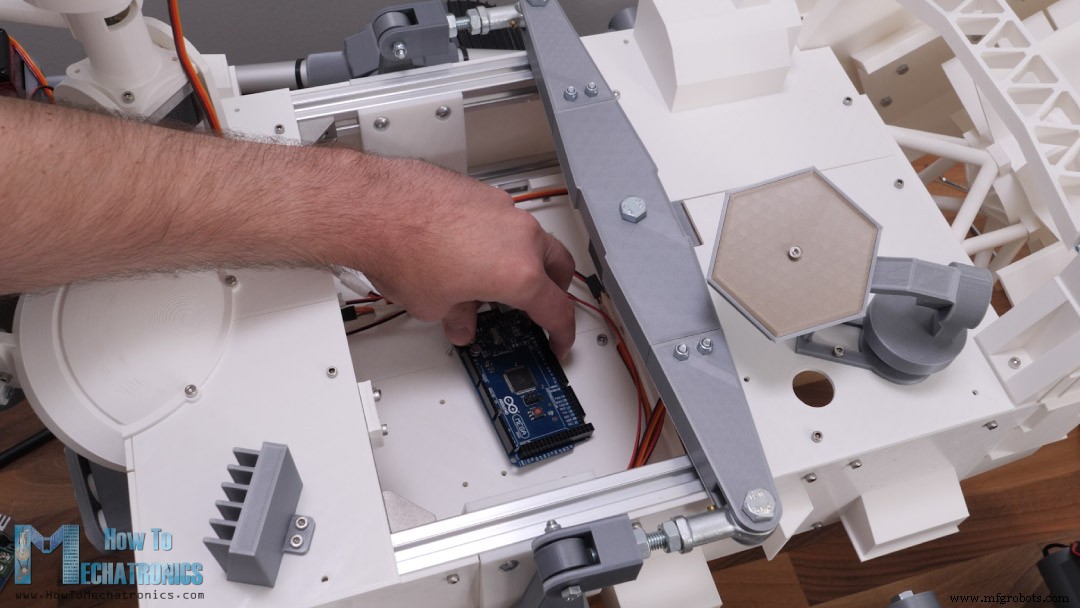
Setelah selesai dengan perakitan PCB, saya mengamankan papan Arduino ke bagian pemasangan elektronik menggunakan dua baut dan menambahkan PCB ke dalamnya.
Kemudian saya menghubungkan setiap motor ke drivernya dan meletakkannya di PCB. Servo masuk ke pin servo yang sesuai, serta driver stepper yang saya gunakan satu jumper untuk memilih resolusi step 1/8.
Untuk komunikasi radio, saya menggunakan pemancar dan penerima FLYSKY RC yang sangat terjangkau dan berfungsi dengan baik.

Untuk menghubungkan receiver ke Arduino, kita dapat menggunakan kabel ekstensi servo karena kita membutuhkan tiga kabel, VCC, GND dan pin Sinyal. Penerima berkomunikasi dengan Arduino melalui I-BUS dan port serial. If we want to send data back from the receiver to the transmitter, in our case for monitoring battery voltage, we also need to connect the sensor I-BUS of the receiver to another Arduino serial port.
The buck convertor is secured in place using two bolts, and for securing the LiPo battery I’m using two rubber bands so in that way I can easily remove the battery for charging.

The power switch goes in the back right panel of the rover. I used 20-gauge wires for these connections as the current flow through them might get up to several amps when the rover is fully engaged. Make sure you double check your connections with these wires because if you connect something wrong you might fire up things.
Lastly, we can connect the FPV camera to a 12V power supply and connect video signal wire to the video transmitter which also needs to be powered with 12V. With this we are done with the electronics.
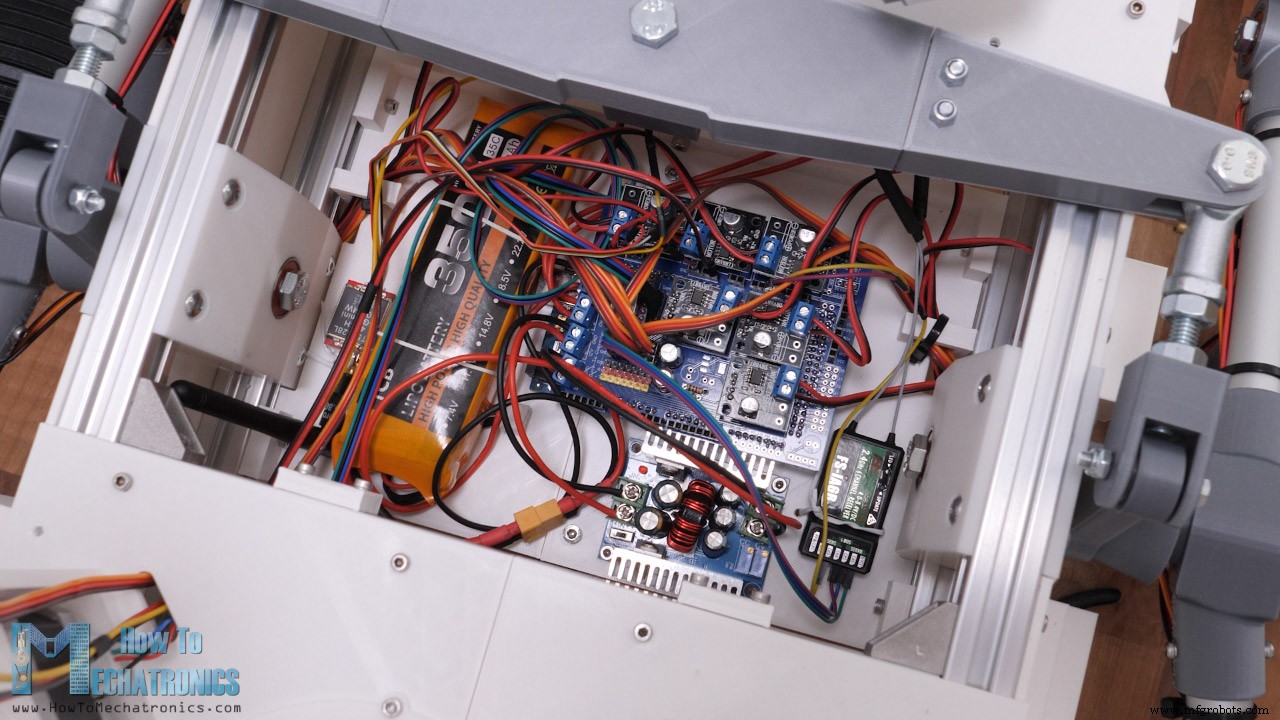
We can put back the cover panels in place and we are done with this DIY Mars Rover. Actually, we are almost done, as we need to give life to this machine now, or program the Arduino.
Programming the DIY Mars Rover – Arduino Code
Here you can download the Arduino code for this DIY Mars Rover project:
Code overview
So, using the IBusBM library we read incoming data from the RC Transmitter.
// Reading the data comming from the RC Transmitter
IBus.loop();
ch0 = IBus.readChannel(0);
ch1 = IBus.readChannel(1);
ch2 = IBus.readChannel(2);
ch3 = IBus.readChannel(3);
ch6 = IBus.readChannel(6);Code language: Arduino (arduino)Then we convert these values into a turning radius to right value, turning radius to left value and rover speed from 0 to 100%.
// Convertign the incoming data
// Steering right
if (ch0 > 1515) {
r = map(ch0, 1515, 2000, 1400, 600); // turining radius from 1400mm to 600mm
}
// Steering left
else if (ch0 < 1485) {
r = map(ch0, 1485, 1000, 1400, 600); // turining radius from 600mm to 1400mm
}
// Rover speed in % from 0 to 100
s = map(ch2, 1000, 2000, 0, 100); // rover speed from 0% to 100%Code language: Arduino (arduino)We use the turning radius “r” value for calculating the steering wheels angles as well as the speed of the wheels.
void calculateMotorsSpeed() {
// if no steering, all wheels speed is the same - straight move
if (ch0 > 1485 && ch0 < 1515) {
speed1 = speed2 = speed3 = s;
}
// when steering, wheels speed depend on the turning radius value
else {
// Outer wheels, furthest wheels from turning point, have max speed
// Due to the rover geometry, all three outer wheels should rotate almost with the same speed. They differe only 1% so we asume they are the same.
speed1 = s;
// Inner front and back wheels are closer to the turing point and have lower speeds compared to the outer speeds
speed2 = s * sqrt(pow(d3, 2) + pow((r - d1), 2)) / (r + d4);
// Inner middle wheel is closest to the turning point, has the lowest speed
speed3 = s * (r - d4) / (r + d4);
}
// speed value from 0 to 100% to PWM value from 0 to 255
speed1PWM = map(round(speed1), 0, 100, 0, 255);
speed2PWM = map(round(speed2), 0, 100, 0, 255);
speed3PWM = map(round(speed3), 0, 100, 0, 255);
}
void calculateServoAngle() {
// Calculate the angle for each servo for the input turning radius "r"
thetaInnerFront = round((atan((d3 / (r + d1)))) * 180 / PI);
thetaInnerBack = round((atan((d2 / (r + d1)))) * 180 / PI);
thetaOuterFront = round((atan((d3 / (r - d1)))) * 180 / PI);
thetaOuterBack = round((atan((d2 / (r - d1)))) * 180 / PI);
}Code language: Arduino (arduino)As I mentioned earlier, we are using the Ackerman steering geometry for calculating them. These values are then used for controlling the servos using the ServoEasing library which provides smoother servo movements.
// Servo motors
servoW1.startEaseTo(97 - thetaOuterFront);
servoW3.startEaseTo(97 + thetaOuterBack);
servoW4.startEaseTo(94 - thetaInnerFront);
servoW6.startEaseTo(96 + thetaInnerBack);Code language: Arduino (arduino)For controlling the DC motors using the analogWrite() function which actually sends PWM signal to the DC motor drivers.
// Motor Wheel 1 - Left Front
analogWrite(motorW1_IN1, speed2PWM); // PWM value
digitalWrite(motorW1_IN2, LOW); // ForwardCode language: Arduino (arduino)Overall, the code is not that complicated as the rover itself doesn’t have complicated functions. However, I do plan in future videos to add more functions to this rover, like GPS navigation, various sensors, robotic arm, soil collecting mechanism and so on.
I hope you enjoyed this project and learned something new. Feel free to ask any question in the comments section below and check my Arduino Projects Collection.