Meminimalkan Kebisingan dan Getaran Motor Stepper dalam Aplikasi Kontrol Gerakan Presisi
Motor stepper bekerja dengan baik di berbagai aplikasi tetapi dapat berjuang dengan riak torsi dan masalah distorsi saat ini. Pelajari tentang QuietStep, algoritme eksklusif dari Allegro MicroSystems, sebagai solusi yang memungkinkan.
Motor stepper menawarkan keunggulan unik dibandingkan motor arus searah (DC) dan brushless DC (BLDC) dalam banyak aplikasi. Stepper bipolar memberikan posisi loop terbuka yang akurat serta torsi kecepatan nol tanpa menggunakan loop kontrol atau sensor eksternal. Dengan kemampuan stepping yang terkontrol, motor stepper bekerja dengan baik di berbagai aplikasi kontrol gerakan presisi termasuk TV sirkuit tertutup (CCTV), printer 3D, kontrol numerik komputer (CNC), peralatan manufaktur tekstil, dan mesin pick and place.
Penerapan motor stepper yang berhasil membutuhkan manajemen kebisingan dan getaran yang efektif. Dalam aplikasi CCTV, misalnya, getaran diterjemahkan langsung ke sensor gambar dan gimbal. Zoom besar yang dikombinasikan dengan gerakan dapat mendistorsi gambar. Dalam pencetakan 3D, resonansi motor atau overshoot yang disebabkan oleh riak torsi tinggi dapat menghasilkan banyak artefak pencetakan yang tidak diinginkan. Dalam kebanyakan kasus, mengurangi getaran motor menghasilkan kualitas gambar yang lebih baik atau pencetakan 3D yang lebih presisi. Mengurangi getaran motor juga memungkinkan pengoperasian yang lebih tenang secara keseluruhan.
Teknologi canggih berdasarkan algoritme kepemilikan kini tersedia untuk meminimalkan kebisingan dan getaran dalam desain motor stepper dengan mengurangi riak torsi dan distorsi arus. Sebelum mempelajari solusi kontrol gerakan ini, ada baiknya untuk memahami apa yang menyebabkan getaran dan kebisingan yang dapat didengar. Pertama, mari kita lihat lebih dekat bagaimana motor stepper beroperasi.
Dasar-Dasar Stepper
Motor stepper bipolar adalah motor DC dengan posisi kutub diskrit yang dibangun dari beberapa kumparan yang diatur dalam dua kelompok yang disebut fase. Rasio arus antara dua fase menentukan bagaimana posisi rotor di antara dua belitan. Dengan cara ini, motor stepper dapat membagi posisinya di antara dua kutub menjadi peningkatan yang lebih kecil yang disebut langkah mikro.
Arus pada masing-masing belitan motor stepper dapat dijumlahkan untuk membuat sebuah vektor dimana besar dari vektor tersebut adalah torsi. Dengan memeriksa arus di masing-masing dari dua fase di ruang kutub, kita dapat memvisualisasikan vektor saat berputar melalui setiap siklus listrik.
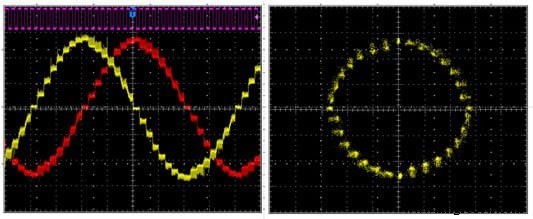
Gambar 1. Arus fasa di masing-masing dari dua belitan motor stepper bipolar pada langkah 1/8 (kiri). Arus fasa di masing-masing dari dua belitan stepper bipolar pada langkah 1/8 tetapi diwakili dalam domain kutub (kanan).
Dalam domain berbasis waktu (Gambar 1 kiri), torsi didefinisikan sebagai jumlah area di bawah dua kurva. Dalam domain kutub (Gambar 1 kanan), besarnya vektor adalah torsi. Dalam gambar-gambar ini, kita dapat melihat bahwa torsi konstan ketika medan bergerak melalui setiap siklus listrik. Ketika torsi tidak konstan, sistem mengalami getaran dan suara bising.
Dengan asumsi motor tidak beroperasi pada resonansi, riak torsi menjadi sumber kebisingan dan getaran terbesar yang dapat didengar di motor stepper.
Mengontrol Motor Stepper (Kontrol Arus)
Kontrol arus modulasi lebar pulsa (PWM) adalah cara paling umum untuk menggerakkan stepper. Dengan menerapkan kontrol arus, pengontrol PWM memotong output, membatasi arus di setiap belitan untuk mempertahankan rasio yang menentukan posisi rotor.
Sifat kontrol arus PWM menghasilkan riak arus berdasarkan siklus kerja yang diterapkan, induktansi motor dan tegangan yang melintasinya. Untuk meminimalkan riak, pengontrol dapat mengatur bagaimana arus berkurang pada belitan dengan menerapkan berbagai mode peluruhan.
Mari kita tinjau mode peluruhan umum untuk satu siklus PWM yang dimulai dengan peningkatan arus drive.
Mengikuti drive, yang ditunjukkan pada gambar 2A, mode peluruhan diimplementasikan selama PWM off-time melalui dua metode sinkron yang ditunjukkan pada gambar 2B dan 2C.
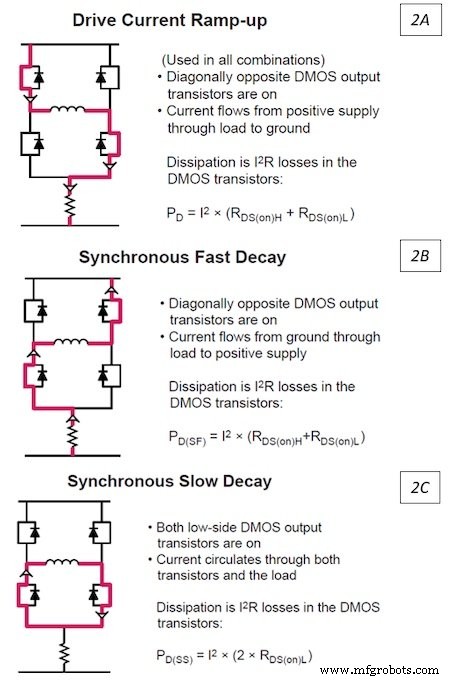
Gambar 2. Jalur saat ini di jembatan penuh yang menunjukkan mode berkendara dan peluruhan.
Peluruhan cepat memberikan kontrol arus yang optimal tetapi menghasilkan riak yang tinggi. Peluruhan lambat menghasilkan riak rendah, tetapi laju peluruhan tunduk pada gaya gerak balik motor (BEMF), yang dalam beberapa kasus dapat menciptakan distorsi arus.
Gambar 3A menunjukkan apa yang dapat terjadi bila menggunakan peluruhan lambat 100 persen. Ketika arus belitan turun, peluruhan lambat tidak dapat menurunkan arus dengan cukup cepat, menyebabkan distorsi pada tepi jatuh. Gambar 3B menunjukkan efek penggunaan peluruhan cepat 100 persen. Arus riak jauh lebih besar, tetapi pengontrol mempertahankan kontrol arus yang akurat.
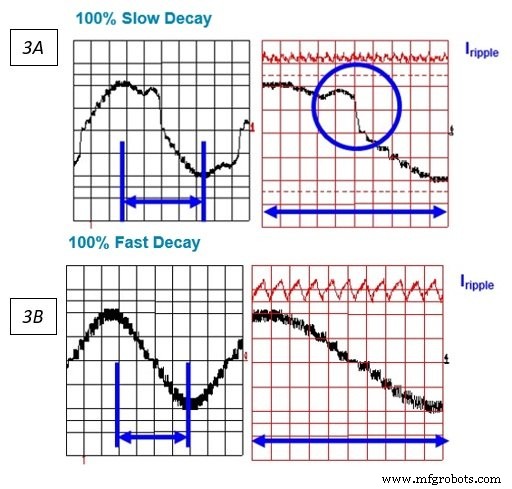
Gambar 3A. Peluruhan lambat dapat menghasilkan distorsi ketika arus dalam beban berkurang.
Gambar 3B. Peluruhan cepat menyebabkan arus riak besar, yang dapat mengakibatkan getaran dan kebisingan yang dapat didengar.
Kita dapat menghindari efek yang ditunjukkan pada Gambar 1 dan juga mempertahankan arus riak yang wajar dengan mencapai kompromi. Ketika arus berkurang pada beban, pengemudi menerapkan kombinasi peluruhan cepat dan lambat, yang dikenal sebagai peluruhan campuran. Waktu mati dibagi menjadi sebagian peluruhan cepat dan sebagian peluruhan lambat, seperti yang ditunjukkan pada Gambar 4. Ketika arus dalam beban meningkat, peluruhan lambat meminimalkan riak.
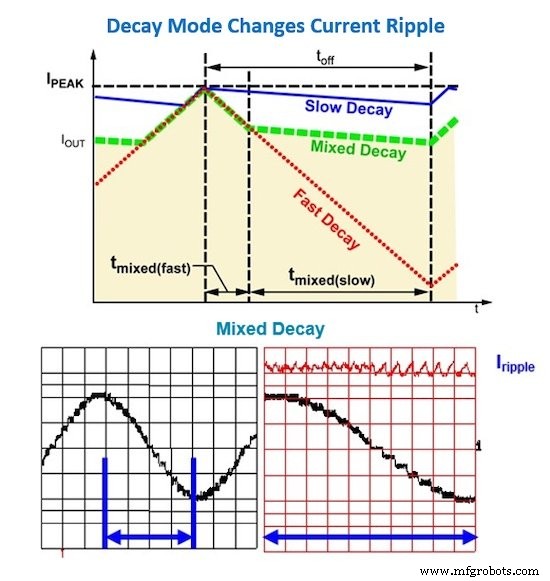
Gambar 4. Peluruhan campuran meminimalkan riak sekaligus mempertahankan kontrol arus dalam belitan.
Bergantung pada karakteristik motor stepper dan konstanta waktu LR-nya, peluruhan lambat pada tepi naik dapat menimbulkan masalah pada arus rendah di mana laju perubahan arus terlalu cepat bagi pengontrol PWM untuk mengatur arus rendah karena pengosongan penguat indera arus. Skenario ini dapat mengakibatkan distorsi arus ketika arus pada beban meningkat, seperti yang ditunjukkan pada Gambar 5.
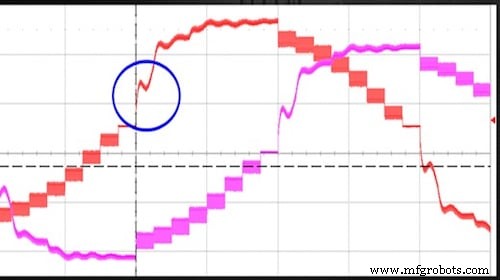
Gambar 5. Peluruhan lambat pada tepi naik dapat menyebabkan distorsi pada motor dengan karakteristik LR tertentu.
Sulit untuk mencapai kompromi mudah yang bekerja untuk semua motor stepper bipolar. Untuk mengatasi masalah ini sambil mempertahankan riak serendah mungkin, sistem harus beradaptasi dengan karakteristik motor yang berbeda.
Pendekatan Baru untuk Mengurangi Riak Torsi
Allegro telah memperkenalkan cara untuk mengurangi riak torsi dan distorsi arus untuk aplikasi motor stepper. Disebut QuietStep, inovasi ini kini tersedia sebagai opsi pada driver motor stepper A5984 terbaru Allegro.
Teknologi QuietStep menggunakan algoritme berpemilik yang secara dinamis menyesuaikan (naik atau turun) persentase peluruhan cepat yang diperlukan berdasarkan siklus demi siklus untuk mencapai kinerja terbaik dalam semua kondisi pengoperasian tanpa menggunakan perangkat lunak yang rumit.
Algoritme membalikkan pendekatan tradisional untuk peluruhan campuran dengan menerapkan peluruhan lambat terlebih dahulu, diikuti oleh peluruhan cepat. Gambar 6A menunjukkan peluruhan campuran tradisional dengan porsi tetap dari peluruhan cepat dan lambat dan dengan peluruhan cepat memulai siklus off-time PWM. Gambar 6B menunjukkan bagaimana pembusukan lambat dimulai saat menggunakan QuietStep di awal siklus waktu mati PWM. QuietStep secara otomatis menyesuaikan rasio peluruhan cepat dan lambat untuk meminimalkan riak arus sambil mempertahankan regulasi arus yang akurat.
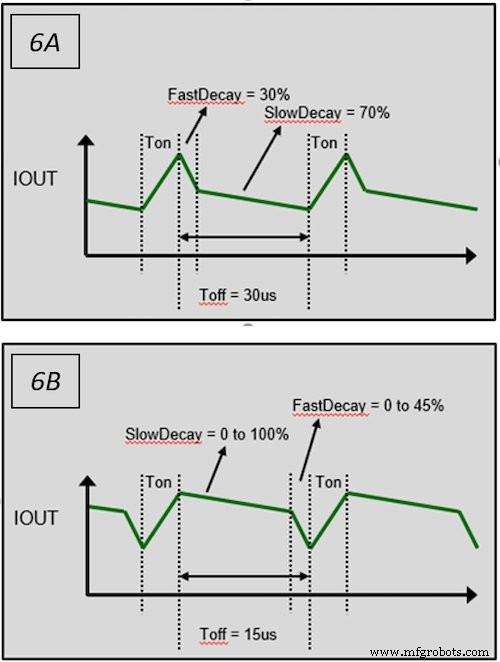
Gambar 6A. Peluruhan campuran tradisional di mana rasio peluruhan cepat dan lambat ditetapkan.
Gambar 6B. QuietStep dapat secara dinamis menyesuaikan rasio peluruhan cepat dan lambat untuk mempertahankan kontrol arus dan meminimalkan riak arus.
Peluruhan cepat diperkenalkan hanya bila diperlukan untuk regulasi saat ini, menghasilkan arus riak serendah mungkin. Gambar 7 menunjukkan arus riak tinggi yang dihasilkan dari peluruhan campuran tetap dengan arus yang berkurang dan hilangnya kendali arus dengan peluruhan lambat dengan arus yang meningkat. Teknologi QuietStep menghilangkan efek ini dengan memotong arus riak menjadi dua jika dibandingkan dengan peluruhan campuran. Saat arus meningkat, QuietStep mempertahankan regulasi arus hingga nol ampere.
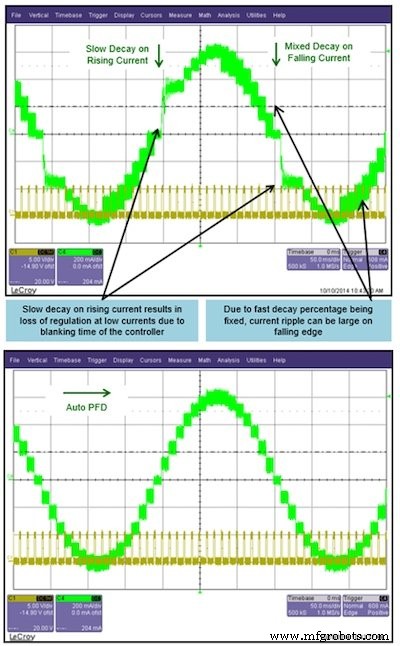
Gambar 7. Peluruhan lambat tradisional dengan meningkatnya arus dan peluruhan campuran untuk arus yang berkurang mengakibatkan hilangnya regulasi saat naik dengan meningkatnya arus dan riak besar dengan arus yang berkurang. QuietStep memberikan pengaturan arus yang sangat baik dengan peningkatan arus sambil mempertahankan arus riak rendah melalui seluruh siklus listrik.
Mengurangi riak dan resonansi arus tingkat sistem meminimalkan getaran serta suara bising yang disebabkan oleh getaran. Hasilnya adalah pencitraan video yang lebih baik dalam sistem CCTV dan kualitas cetak yang unggul dalam printer 3D.
Mengurangi kebisingan dan getaran yang terdengar meningkatkan hampir setiap aplikasi kontrol motor, dari kunci pintu otomatisasi rumah dan kontrol katup hingga sistem penglihatan presisi dan pencetakan 3D. Teknologi QuietStep Allegro menghilangkan kerumitan dalam mencoba menentukan sumber kebisingan dan getaran dalam suatu sistem. Sepenuhnya terintegrasi ke dalam IC, QuietStep mudah diimplementasikan, tidak memerlukan pemrograman atau komponen eksternal, dan sepenuhnya otomatis.
Menyebarkan QuietStep dengan Driver Motor Stepper Bipolar
Dengan driver motor microstepping yang memungkinkan teknologi canggih ini, seperti Allegro A5984, bentuk gelombang arus dioptimalkan secara otomatis pada berbagai kecepatan dan karakteristik motor stepper. Solusi driver motor stepper, yang dilengkapi dengan teknologi QuietStep, menyesuaikan jumlah peluruhan cepat secara on-the-fly selama siklus PWM untuk meminimalkan riak arus pada berbagai kondisi pengoperasian.
Fitur QuietStep meningkatkan kinerja sistem, menghasilkan pengurangan kebisingan motor yang terdengar, getaran yang lebih rendah, dan peningkatan akurasi langkah. Memanfaatkan teknologi ini, driver A5984 dirancang untuk mengoperasikan motor stepper bipolar dari mode full-step hingga 1/32 step dan memungkinkan kapasitas drive output hingga 40 V dan ±2 A. Secara keseluruhan, algoritma QuietStep memungkinkan sistem yang lebih mudah desain, implementasi dan operasi.
Untuk mempelajari lebih lanjut tentang driver A5984 dan teknologi QuietStep, kunjungi halaman produk A5984.
Allegro MicroSystems adalah pemimpin global dalam solusi daya dan penginderaan untuk kontrol gerak dan sistem hemat energi. Untuk informasi lebih lanjut, kunjungi situs web Allegro MicroSystems.
Artikel Industri adalah bentuk konten yang memungkinkan mitra industri untuk berbagi berita, pesan, dan teknologi yang bermanfaat dengan pembaca All About Circuits dengan cara yang tidak sesuai dengan konten editorial. Semua Artikel Industri tunduk pada pedoman editorial yang ketat dengan tujuan menawarkan kepada pembaca berita, keahlian teknis, atau cerita yang bermanfaat. Sudut pandang dan pendapat yang diungkapkan dalam Artikel Industri adalah dari mitra dan belum tentu dari All About Circuits atau penulisnya.


