Penginderaan Posisi Efek Hall:Linearitas Respons dan Kemiringan untuk Konfigurasi Slide-By
Pelajari tentang bagaimana berbagai keputusan terkait solusi penginderaan efek Hall—khususnya untuk konfigurasi slide-by—dapat memengaruhi desain Anda.
Sensor efek hall memungkinkan solusi yang efisien untuk penginderaan posisi. Dengan sensor Hall, tidak ada koneksi mekanis antara sensor dan bagian yang bergerak, sehingga keandalan dan daya tahan yang lebih tinggi dapat dicapai.
Ada beberapa konfigurasi sensor magnet yang berbeda yang dapat digunakan dalam aplikasi penginderaan posisi berbasis efek Hall. Pada artikel ini, kita akan melihat konfigurasi magnetik slide-by yang dapat menghasilkan kurva Gauss versus jarak linier. Kita juga akan melihat bahwa dimungkinkan untuk menggunakan kombinasi magnet untuk menyesuaikan kemiringan kurva Gauss versus jarak.
Linearitas Dapat Menjadi Faktor Keputusan
Dalam artikel sebelumnya, kami memeriksa konfigurasi head-on dan slide-by yang sederhana. Kedua pengaturan ini ditunjukkan pada Gambar 1.
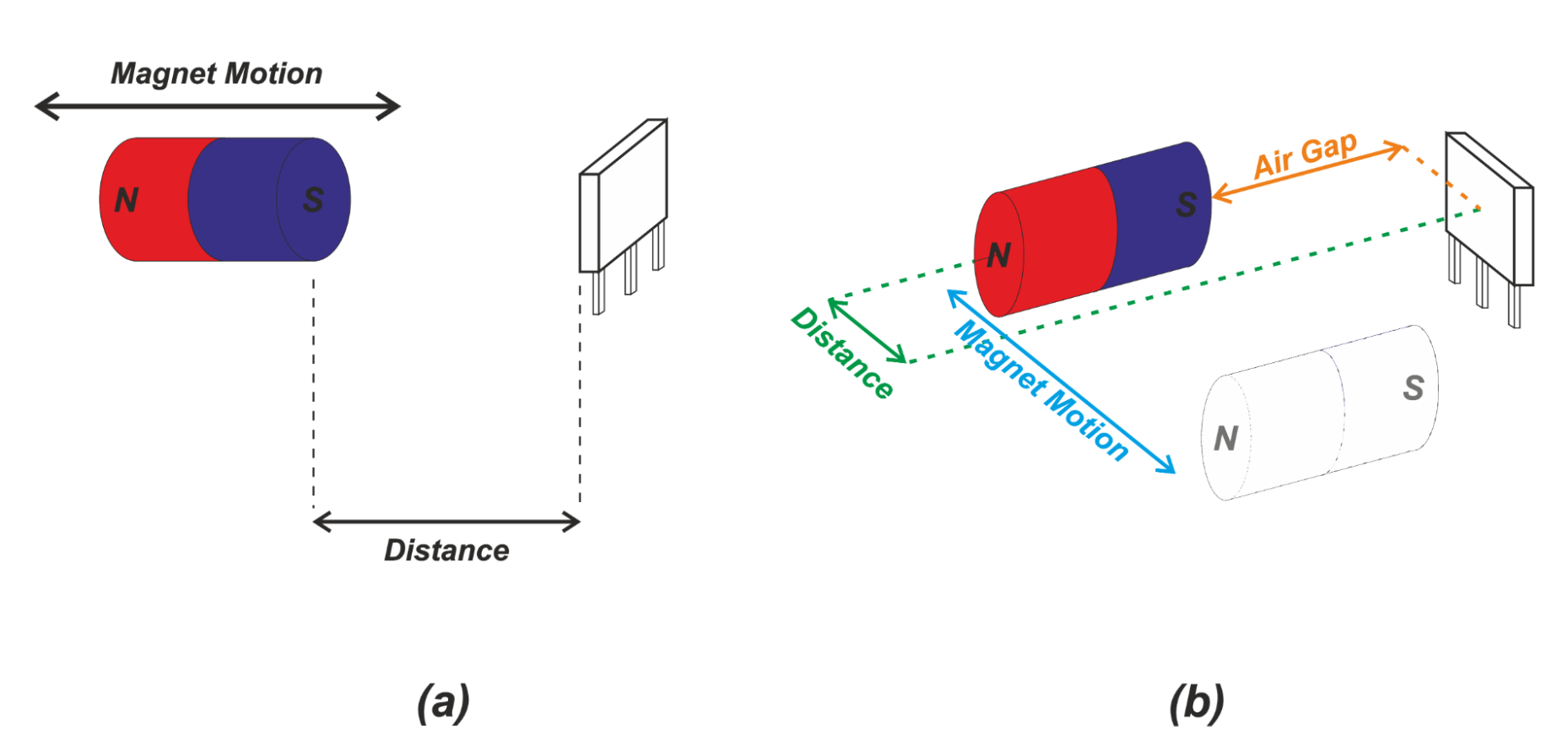
Gambar 1 (a). Langsung dan (b) penginderaan slide-by.
Kita melihat bahwa hubungan antara medan penginderaan dan jarak adalah non-linier dengan pengaturan di atas. Konfigurasi sensor magnet ini biasanya digunakan sebagai pendeteksi jarak dalam aplikasi yang persyaratan akurasinya tidak terlalu menuntut.
Namun, ketika kontrol posisi yang baik di sepanjang langkah penginderaan diperlukan, kami lebih memilih untuk memiliki hubungan linier antara keluaran sensor dan perpindahan. Faktanya, meskipun kita dapat menggunakan perangkat lunak untuk menghilangkan kesalahan linearitas sensor, memiliki respons linier diinginkan karena meningkatkan presisi pengukuran dan memfasilitasi kalibrasi sistem.
Linear Slide-By Sensing
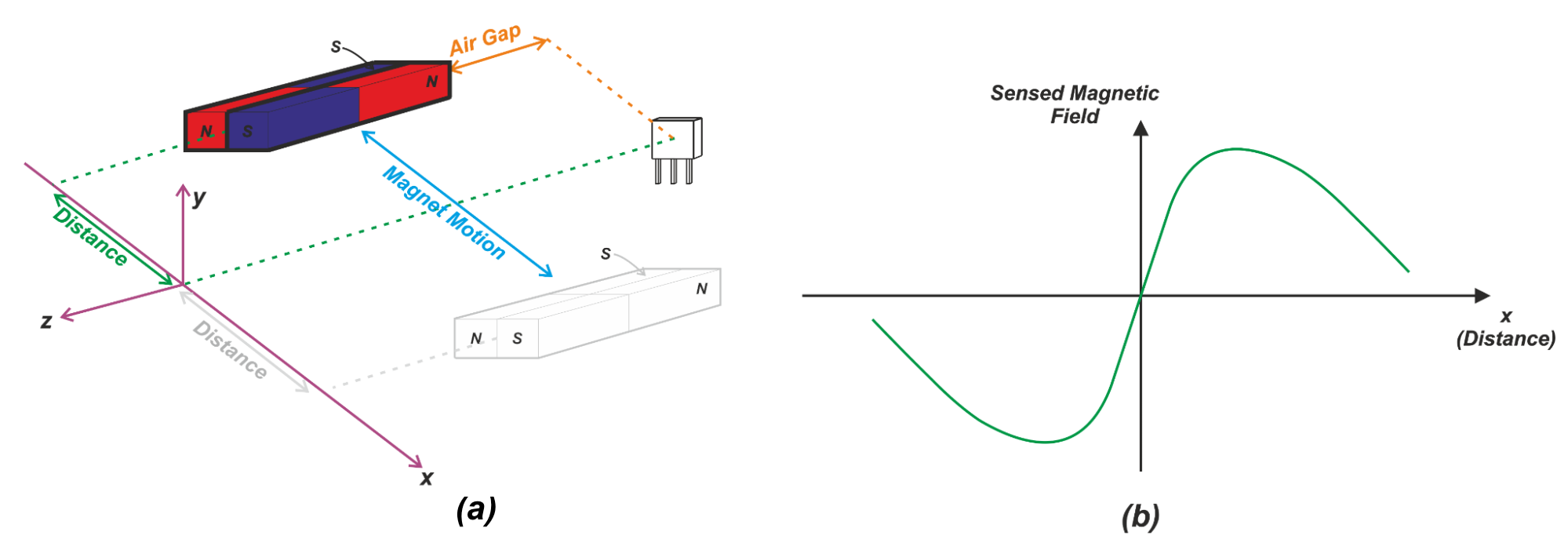
Gambar 2(a) menunjukkan pengaturan slide-by yang menunjukkan hubungan linier antara komponen z dari medan magnet yang dirasakan dan perpindahan magnet. Gambar 2(b) menunjukkan kerapatan fluks magnet (dalam arah sumbu z) versus perjalanan magnet.
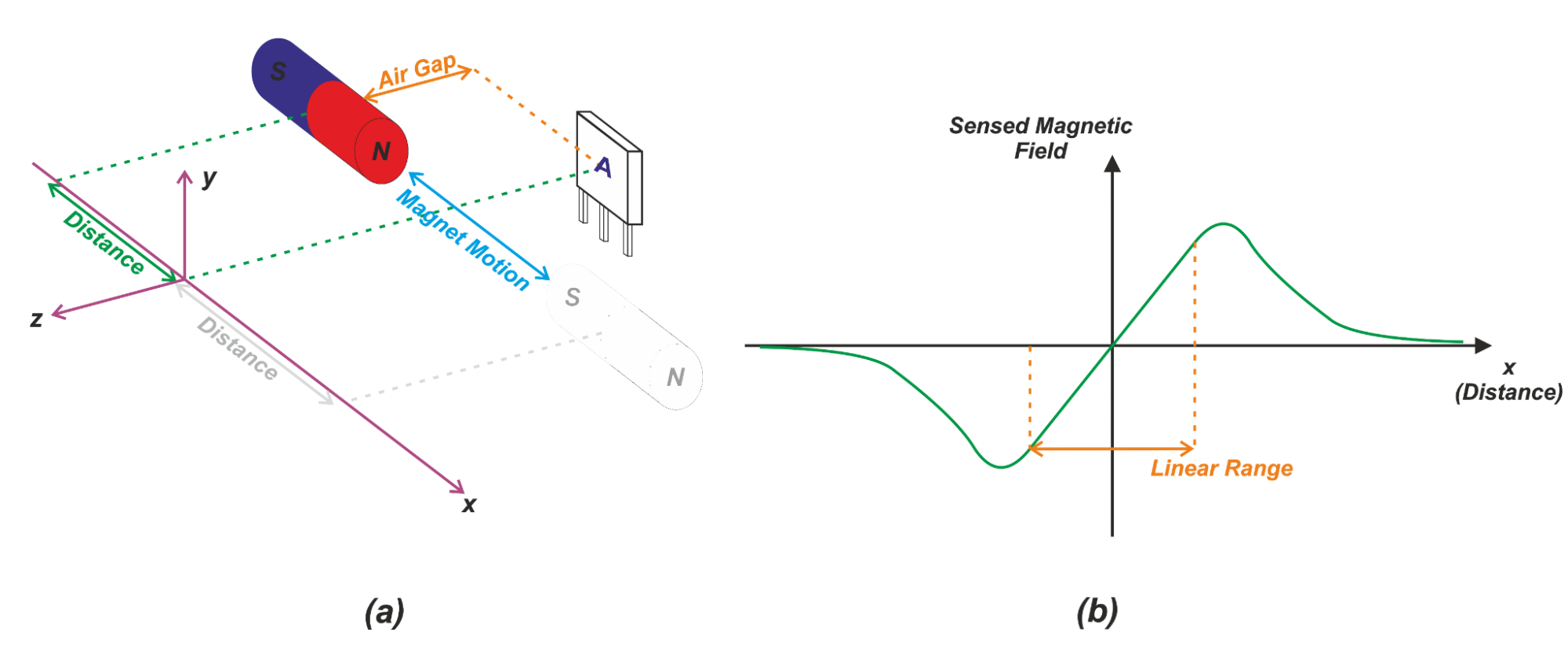
Gambar 2 (a). Konfigurasi slide-by dengan respons linier (b) kerapatan fluks magnet versus posisi magnet
Ketika magnet berada di sisi kiri sensor (x<0), garis medan magnet magnet menghasilkan komponen yang berlawanan arah dengan sumbu z. Perhatikan bahwa garis medan bergerak dari kutub utara ke kutub selatan magnet.
Gambar 3 menunjukkan salah satu garis medan yang melalui sensor.
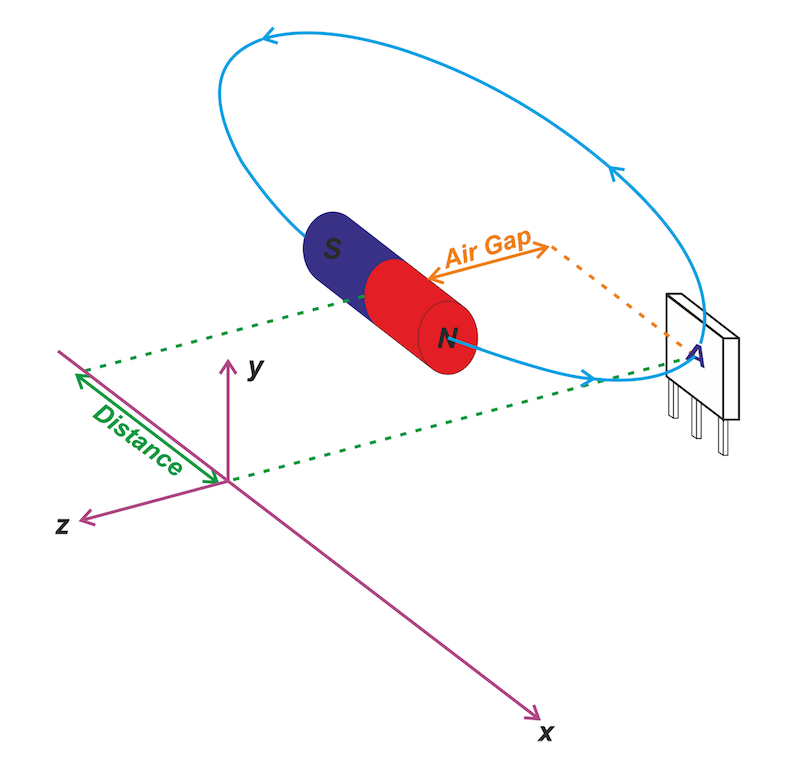
Gambar 3. Arah garis medan magnet melalui sensor efek Hall
Oleh karena itu, untuk x<0, komponen z dari medan magnet yang dirasakan adalah negatif. Ketika magnet mencapai posisi tengah, medan dalam arah z akan menjadi nol. Untuk perpindahan positif (x>0), medan magnet akan menghasilkan komponen pada arah sumbu z (medan magnet positif). Untuk perpindahan besar di kedua arah, sejumlah kecil garis medan dapat melalui sensor. Oleh karena itu, medan magnet yang dirasakan oleh sensor berkurang.
Salah satu fitur kunci dari pengaturan ini adalah bahwa komponen z dari medan magnet menunjukkan hubungan linier dengan perpindahan di sekitar titik asal. Rentang linier ini ditunjukkan pada Gambar 2(b). Panjang daerah linier sedikit lebih kecil dari panjang magnet. Misalnya, dengan magnet 22 mm, wilayah linier dapat memanjang dari sekitar -10 mm hingga +10 mm. Perilaku linier ini memungkinkan kita mendeteksi posisi objek bergerak dengan lebih mudah dan akurat.
Bagaimana Jika Kita Membutuhkan Rentang Linier yang Lebih Besar?
Kita dapat menggunakan magnet yang lebih panjang untuk meningkatkan jangkauan linier dari konfigurasi di atas; namun, aplikasi tertentu tidak dapat menampung magnet besar dalam sistem. Juga, dengan magnet yang panjang, biaya dapat menjadi faktor pembatas. Jika stroke yang lebih panjang dari panjang magnet perlu dideteksi, kita dapat menggunakan serangkaian sensor untuk memperluas jangkauan pengukuran. Ini ditunjukkan pada Gambar 4.
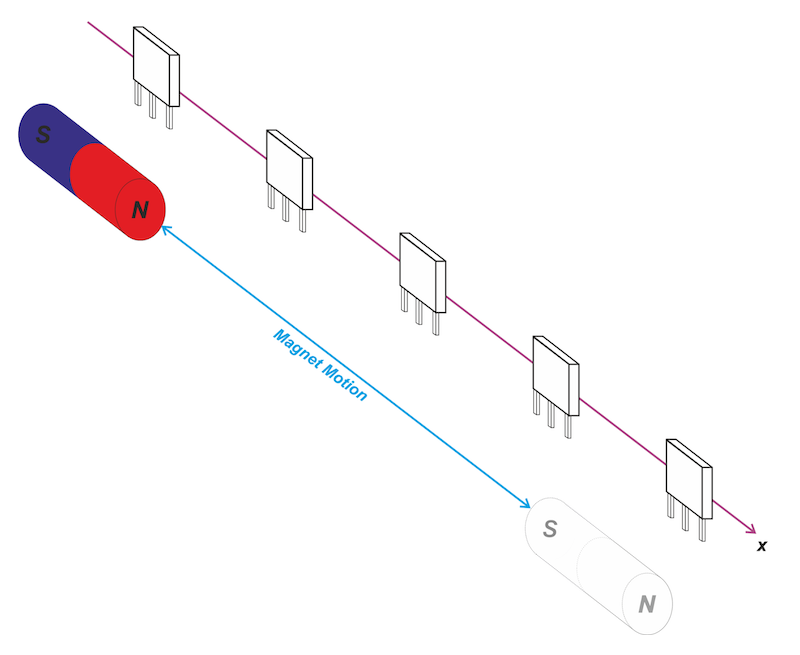
Gambar 4. Menggunakan beberapa sensor efek Hall untuk meningkatkan jangkauan linier
Dalam hal ini, kita perlu memproses data dari lebih dari satu sensor untuk menemukan posisi objek. Untuk detail lebih lanjut, silakan lihat catatan aplikasi TI ini.
Mendeteksi Keberadaan Objek
Konfigurasi slide-by pada Gambar 2 juga dapat digunakan untuk mendeteksi keberadaan suatu objek (daripada menentukan posisi objek di atas goresannya). Asumsikan bahwa dalam contoh yang digambarkan pada Gambar 2(a), magnet bergerak sejajar dengan sumbu x dari kiri ke kanan. Misalkan titik operasi dan pelepasan magnet dari sensor efek Hall digital (ON/OFF) kami seperti yang ditunjukkan pada Gambar 5.
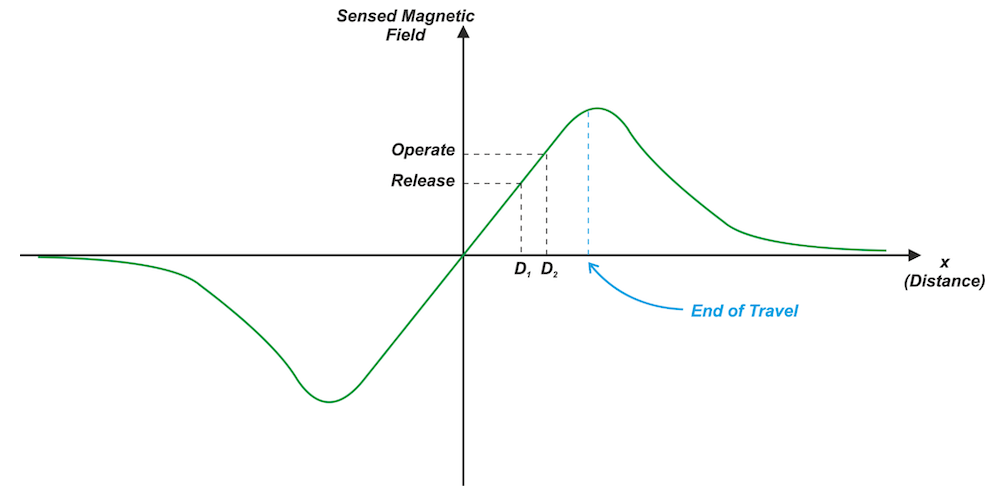
Gambar 5. Menggunakan konfigurasi slide-by untuk penginderaan ON/OFF
Saat magnet mendekati sensor dari kiri ke kanan, intensitas medan magnet menjadi semakin besar. Pada D2, medan magnet yang dirasakan sama dengan titik operasi magnet yang menghidupkan sensor. Mendekatkan magnet ke sensor akan menghasilkan medan magnet yang lebih besar dan membuat sensor AKTIF.
Sekarang, jika kita menggerakkan sensor ke arah yang berlawanan (dari kanan ke kiri), medan magnet berkurang. Pada D1, medan magnet menjadi lebih kecil dari titik pelepasan yang membuat sensor OFF. Ini memungkinkan kita untuk mendeteksi keberadaan objek. Kita juga dapat menggunakan struktur ini untuk menentukan titik referensi (titik pengalih sensor) pada objek stroke.
Menurut kurva kerapatan fluks magnet versus jarak pada Gambar 5, kerapatan fluks magnet tertentu dapat dihasilkan oleh dua perpindahan yang berbeda. Itu sebabnya pengaturan di atas biasanya digunakan dalam aplikasi di mana struktur mekanis membatasi akhir perjalanan objek sedemikian rupa sehingga perpindahan sensor hanya dapat terjadi pada satu perpindahan tertentu. Ini mencegah ambiguitas dalam interpretasi hasil.
Meningkatkan Gradien Kurva Jarak Versus Gauss
Kita telah membahas di atas bahwa sensor efek Hall digital (ON/OFF) dapat digunakan dengan konfigurasi slide-by untuk menentukan titik referensi pada objek stroke. Jika kita dapat meningkatkan kemiringan kurva Gauss versus jarak, kita dapat mendeteksi titik referensi dengan lebih presisi.
Dengan kemiringan yang lebih besar, perpindahan yang diberikan menyebabkan perubahan intensitas medan magnet yang lebih besar yang dapat lebih mudah dideteksi oleh sensor. Gambar 6(a) menunjukkan sistem magnetik yang menunjukkan kemiringan yang lebih besar dari konfigurasi pada Gambar 2(a).
Gambar 6. Menggunakan beberapa magnet untuk meningkatkan resolusi kekuatan medan
Dalam hal ini, kutub utara dan selatan sepasang magnet digerakkan dalam kaitannya dengan sensor. Medan keseluruhan ditentukan oleh garis medan dari kedua magnet. Dalam pengaturan ini, jarak diukur terhadap pusat pasangan magnet. Gambar 6(b) menunjukkan komponen z dari medan magnet yang dirasakan versus jarak. Pada posisi tengah (x=0), jumlah garis medan dari kutub utara salah satu magnet yang melalui sensor sama dengan jumlah garis medan dari kutub selatan magnet lainnya. Oleh karena itu, kerapatan fluks magnet bersih adalah nol.
Asumsikan bahwa kita menggerakkan magnet ke kanan dari posisi tengah (x>0). Ini tiba-tiba meningkatkan jumlah garis medan dari kutub selatan dan menciptakan medan magnet dengan komponen z positif. Demikian pula, saat kita menggerakkan magnet ke kiri dari posisi tengah (x<0), kita memperoleh medan magnet yang relatif kuat dengan komponen z negatif. Di sekitar titik asal, gradien kurva lebih tinggi daripada konfigurasi slide-by pada Gambar 2(a) karena transisi dari kutub utara ke selatan terjadi secara tiba-tiba. Kemiringan kurva Gauss versus jarak yang relatif lebih besar ini dapat membantu kita menentukan posisi referensi objek bergerak dengan lebih akurat.
Ada dua varian menarik lainnya dari konfigurasi slide-by ini. Satu versi memisahkan dua magnet dengan jarak tetap yang kecil. Hal ini memungkinkan kita untuk memiliki transisi yang tidak terlalu mendadak dari kutub utara ke kutub selatan dan karenanya, menyesuaikan kemiringan respons di sekitar titik asal. Versi lain menggunakan kombinasi tiga magnet. Ini dapat menciptakan respons simetris dengan kemiringan besar di kedua arah. Sebuah respon simetris dapat berguna ketika mendeteksi penyimpangan dari garis tengah. Untuk mempelajari lebih lanjut tentang dua konfigurasi ini, silakan merujuk ke manual "Penginderaan Efek Hall dan Aplikasi" dari Honeywell.
Untuk melihat daftar lengkap artikel saya, silakan kunjungi halaman ini.


