Memahami pilihan panjang gelombang dalam sistem LiDAR
Ada berbagai jenis LiDAR. Mereka yang terlibat dalam industri otomotif harus menyadari kekuatan dan kelemahan relatif masing-masing.
Diakui secara luas bahwa sistem bantuan pengemudi canggih (ADAS) dan mengemudi otonom (AD) dapat berhasil dengan penginderaan yang efektif dari lingkungan sekitar kendaraan yang dimasukkan ke dalam algoritme yang memungkinkan navigasi otonom. Mengingat ketergantungan mutlak pada penginderaan dalam situasi kritis kehidupan, beberapa modalitas sensor digunakan dengan data yang digabungkan bersama untuk menambah satu sama lain dan memberikan redundansi. Hal ini memungkinkan setiap teknologi untuk memainkan kekuatannya dan memberikan solusi gabungan yang lebih baik.
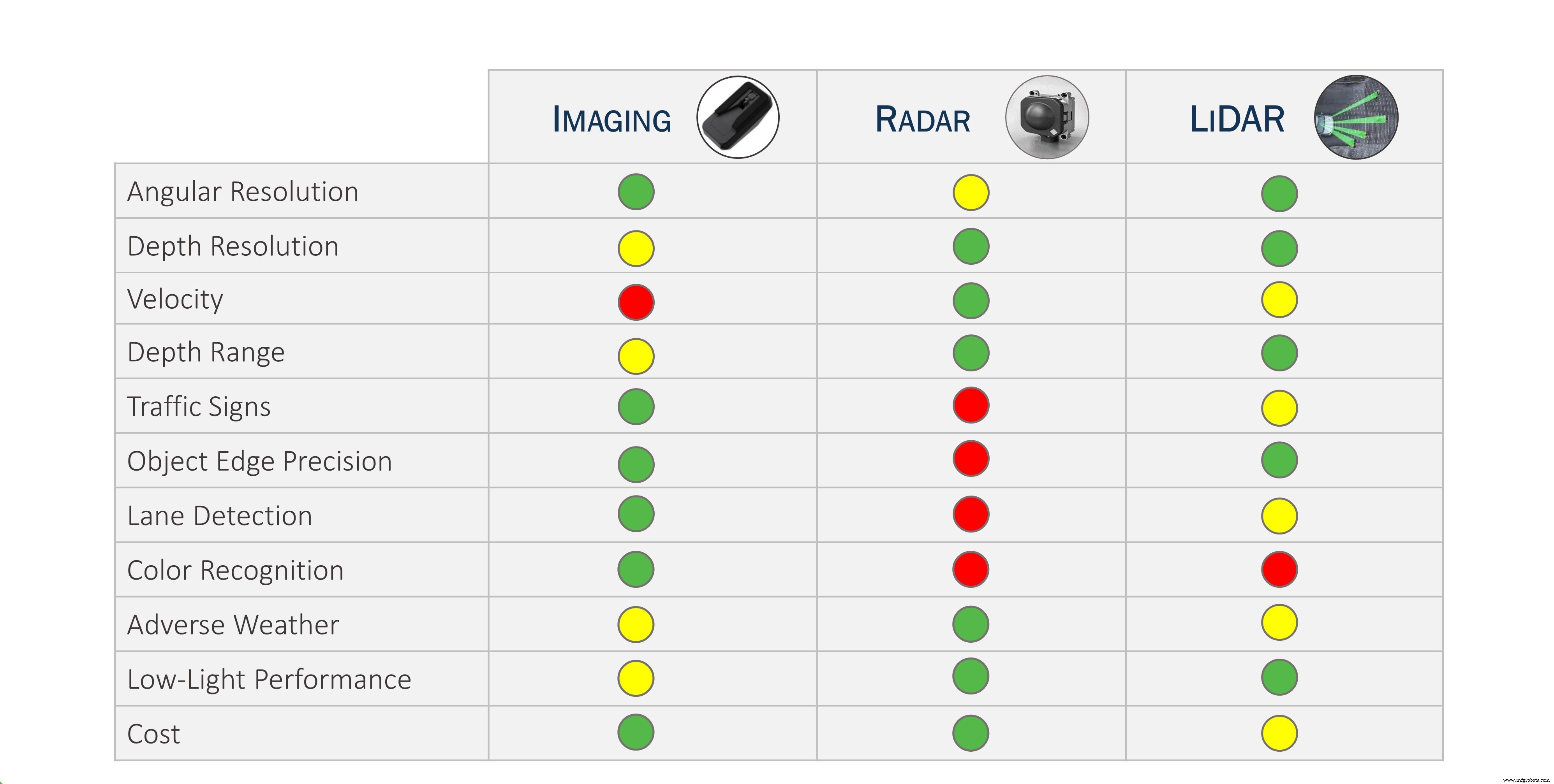
Tiga modalitas yang akan menonjol untuk sensor yang digunakan pada kendaraan untuk ADAS dan AD ke depan adalah sensor gambar, radar, dan LiDAR (Light Detection and Ranging). Masing-masing sensor ini memiliki kekuatannya sendiri dan bersama-sama mereka dapat terdiri dari rangkaian sensor lengkap yang mengirimkan data untuk memungkinkan algoritme persepsi otonom membuat keputusan dengan fusi sensor — kemampuan untuk memberikan warna, intensitas, kecepatan, dan kedalaman untuk setiap titik atau kernel di tempat kejadian.
Gambar 1:Sensor fusion memanfaatkan kekuatan setiap modalitas untuk memberikan informasi lengkap tentang lingkungan kendaraan.
Dari ketiga modalitas prinsip ini, LiDAR adalah teknologi paling baru yang dikomersialkan untuk penggunaan pasar massal, meskipun konsep penggunaan cahaya untuk mengukur jarak telah berlangsung beberapa dekade. Pasar untuk LiDAR otomotif akan menunjukkan pertumbuhan spektakuler yang meningkat dari $39 juta pada tahun 2020 menjadi proyeksi $1,75 miliar pada tahun 2025, menurut Yole Développement, didorong oleh proliferasi sistem otonom yang membutuhkan rangkaian sensor lengkap. Peluangnya sangat besar sehingga ada lebih dari 100 perusahaan yang mengerjakan teknologi LiDAR, dengan investasi kumulatif ke dalam perusahaan-perusahaan ini melebihi $1,5 miliar dolar pada tahun 2020 — dan ini sebelum penawaran umum perdana yang didorong oleh SPAC oleh lebih dari segelintir perusahaan. Perusahaan LiDAR yang dimulai pada akhir 2020. Tetapi ketika ada begitu banyak perusahaan yang mengerjakan satu teknologi — beberapa di antaranya secara fundamental berbeda seperti panjang gelombang cahaya yang digunakan (contoh yang menonjol adalah 905nm dan 1550nm) — tidak dapat dihindari bahwa akan ada menjadi teknologi pemenang dan konsolidasi, seperti yang telah terlihat berkali-kali, apakah itu Ethernet untuk jaringan atau VHS untuk video.
Ketika kita melihat pengguna teknologi LiDAR — produsen kendaraan otomotif, bersama dengan perusahaan yang merancang dan membangun kendaraan robotik otonom untuk mengangkut orang dan barang — hal terpenting dalam pikiran mereka adalah kebutuhan mereka. Pada akhirnya, perusahaan-perusahaan ini ingin pemasok menyediakan sensor LiDAR yang berbiaya rendah dengan tingkat keandalan yang tinggi sekaligus memenuhi spesifikasi kinerja jangkauan dan deteksi objek dengan reflektifitas rendah. Meskipun semua insinyur memiliki sudut pandang yang kuat, perusahaan-perusahaan ini cenderung agnostik terhadap penerapan teknologi jika pemasok dapat memenuhi persyaratan kinerja dan keandalan dengan biaya yang tepat. Dan itu mengarah pada perdebatan mendasar yang ingin diselesaikan oleh artikel ini:Panjang gelombang mana yang akan berlaku untuk aplikasi LiDAR otomotif?
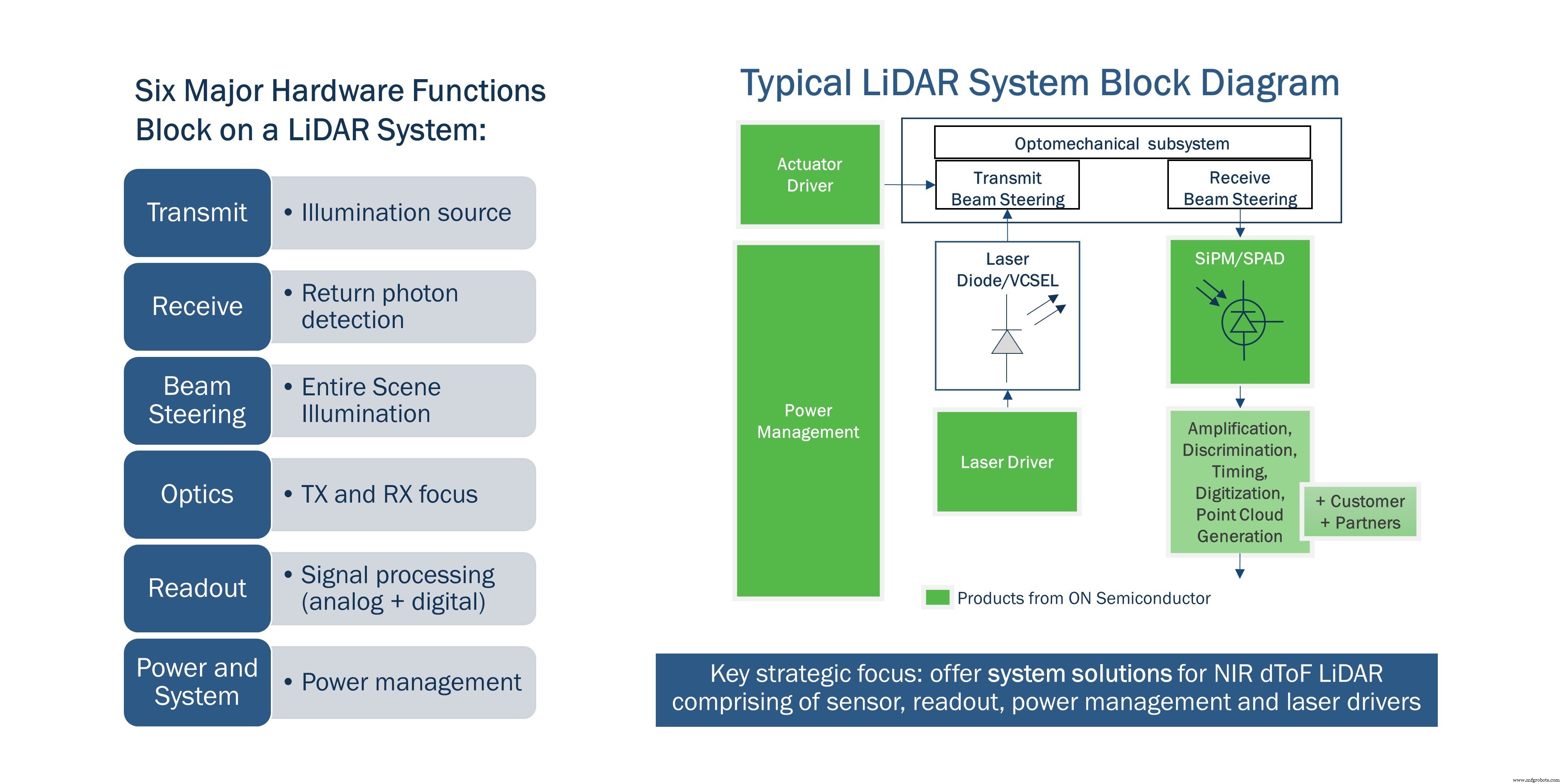
Ikhtisar LiDAR Untuk mulai menjawab pertanyaan ini, perlu dipahami anatomi sistem LiDAR, yang memiliki arsitektur berbeda. LiDAR koheren, jenis yang disebut sebagai gelombang kontinu termodulasi frekuensi (FMCW), mencampur sinyal laser yang ditransmisikan dengan cahaya yang dipantulkan untuk menghitung jangkauan dan kecepatan objek. FMCW menawarkan beberapa keuntungan tetapi masih relatif jarang jika dibandingkan dengan pendekatan LiDAR yang paling umum, LiDAR waktu penerbangan langsung (dToF). Implementasi ini mengukur jarak ke suatu objek dengan menentukan waktu yang diperlukan untuk pulsa cahaya yang sangat pendek yang dikirim dari sumber iluminasi untuk dipantulkan dari objek dan dikembalikan untuk dideteksi oleh sensor. Ia menggunakan kecepatan cahaya untuk secara langsung menghitung jarak ke objek menggunakan rumus matematika sederhana yang berkaitan dengan waktu, kecepatan, dan jarak. Sistem LiDAR dToF yang khas memiliki enam fungsi perangkat keras utama, meskipun pilihan panjang gelombang sebagian besar memengaruhi fungsi pengiriman dan penerimaan.
klik untuk gambar ukuran penuh Gambar 2:Diagram blok dari sistem dToF tipikal dengan bagian hijau yang mewakili beberapa area fokus produk ON Semiconductor.
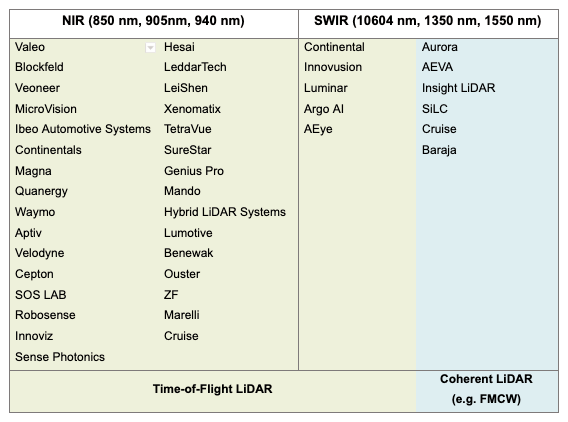
Tabel 1 menunjukkan daftar berbagai produsen LiDAR mulai dari Tier-1 otomotif yang terkenal hingga perusahaan rintisan di seluruh wilayah dunia. Berdasarkan laporan pasar dan informasi publik, sebagian besar perusahaan ini mengoperasikan LiDAR mereka pada panjang gelombang inframerah-dekat (NIR), sebagai lawan dari panjang gelombang inframerah gelombang pendek (SWIR). Selain itu, sementara pemasok yang berfokus pada SWIR yang bekerja di FMCW terbatas pada panjang gelombang tersebut, sebagian besar dari mereka yang menerapkan waktu penerbangan langsung memiliki jalur untuk membuat sistem dengan panjang gelombang NIR, jika mereka memilih, sambil dapat memanfaatkan banyak IP yang ada di sekitar fungsi seperti beam-steering dan pemrosesan sinyal.
Tabel 1:Daftar produsen LiDAR yang beroperasi pada panjang gelombang NIR dan SWIR. Bukan daftar yang lengkap. (Sumber gambar:Yole, IHS Markit, dan pengungkapan publik)
Mengingat bahwa mayoritas, tetapi tidak semua, dari produsen ini telah memilih panjang gelombang NIR, bagaimana mereka sampai pada keputusan ini dan apa implikasinya harus dipertimbangkan. Inti dari diskusi adalah beberapa fisika dasar yang terkait dengan sifat cahaya dan bahan semikonduktor yang menyusun komponen yang digunakan dalam LiDAR.
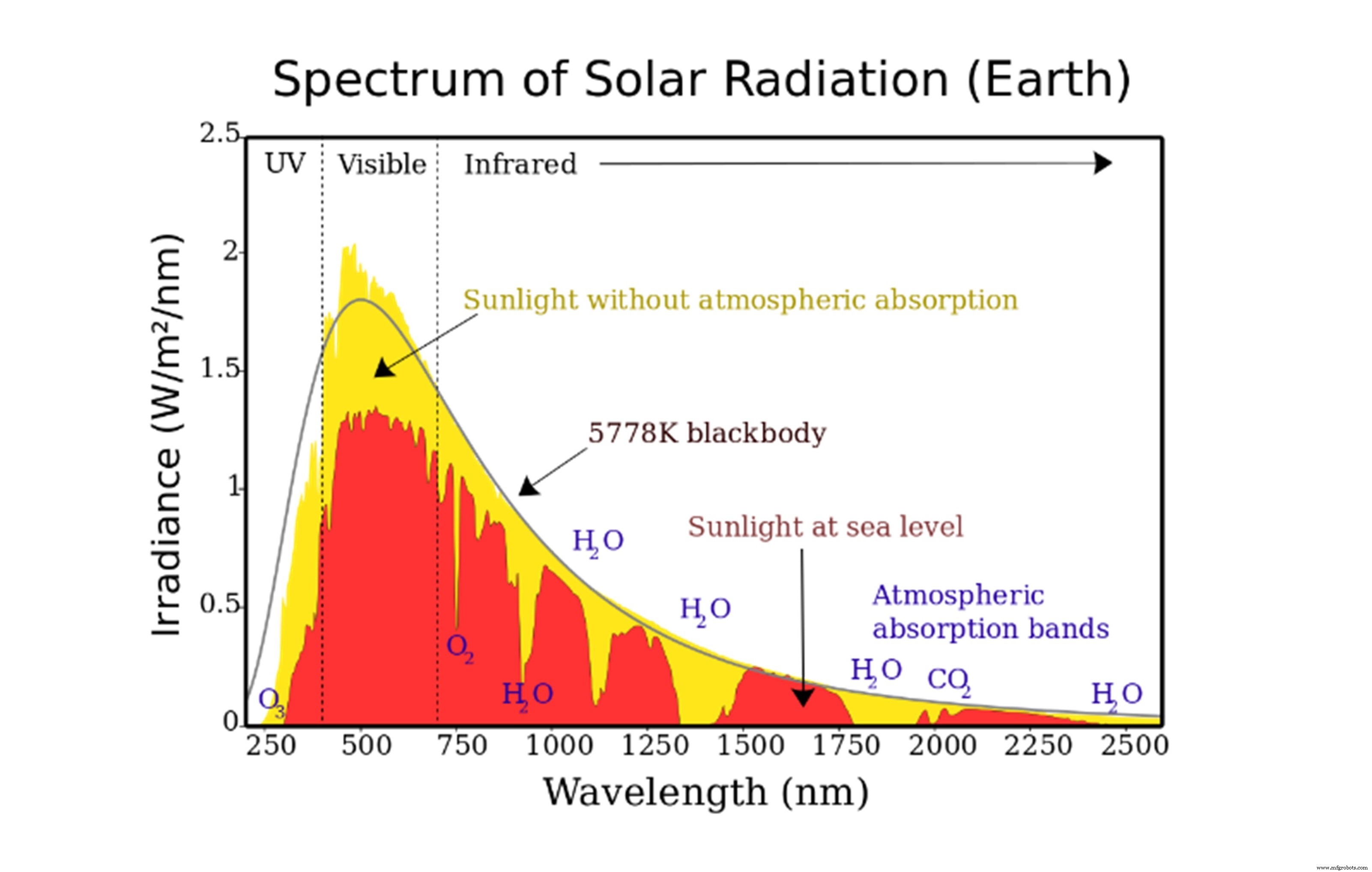
Foton yang ditembakkan oleh laser dalam sistem LiDAR, yang dimaksudkan untuk dipantulkan dari objek dan diterima oleh detektor, harus bersaing dengan foton sekitar yang berasal dari matahari. Melihat spektrum radiasi matahari dan memperhitungkan penyerapan atmosfer, ada "penurunan" dalam radiasi pada panjang gelombang tertentu yang akan mengurangi jumlah foton yang ada sebagai kebisingan untuk sistem. Pada 905nm, ada sekitar 3x lebih tinggi jumlah penyinaran matahari daripada pada 1550nm, yang berarti sistem NIR harus menghadapi lebih banyak noise yang dapat mengganggu sensor. Namun ini hanyalah salah satu faktor yang perlu dipertimbangkan saat memilih panjang gelombang untuk sistem LiDAR.
Gambar 3:Penyerapan cahaya di atmosfer menghasilkan puncak yang jelas.
Sensor Komponen yang bertanggung jawab untuk merasakan foton dalam sistem LiDAR adalah jenis fotodetektor yang berbeda, jadi penting untuk menjelaskan mengapa mereka dapat dibuat dari bahan semikonduktor yang berbeda tergantung pada panjang gelombang yang akan dideteksi. Dalam semikonduktor, celah pita memisahkan pita valensi dan konduksi. Foton menyediakan energi untuk membantu elektron mengatasi celah pita itu dan membuat semikonduktor menjadi konduktif, sehingga menciptakan arus foto. Setiap energi foton terkait dengan panjang gelombangnya, dan celah pita semikonduktor terkait dengan sensitivitasnya — inilah mengapa bahan semikonduktor yang berbeda diperlukan tergantung pada panjang gelombang cahaya yang akan dideteksi. Silikon, yang merupakan semikonduktor paling umum dan termurah untuk diproduksi, responsif terhadap panjang gelombang tampak dan NIR hingga sekitar 1000nm. Untuk mendeteksi panjang gelombang di luar rentang SWIR, paduan semikonduktor grup III/V yang lebih eksotis dapat dilakukan untuk membuat bahan seperti InGaAs mampu mendeteksi panjang gelombang cahaya tersebut, dari 1000nm hingga 2500nm.
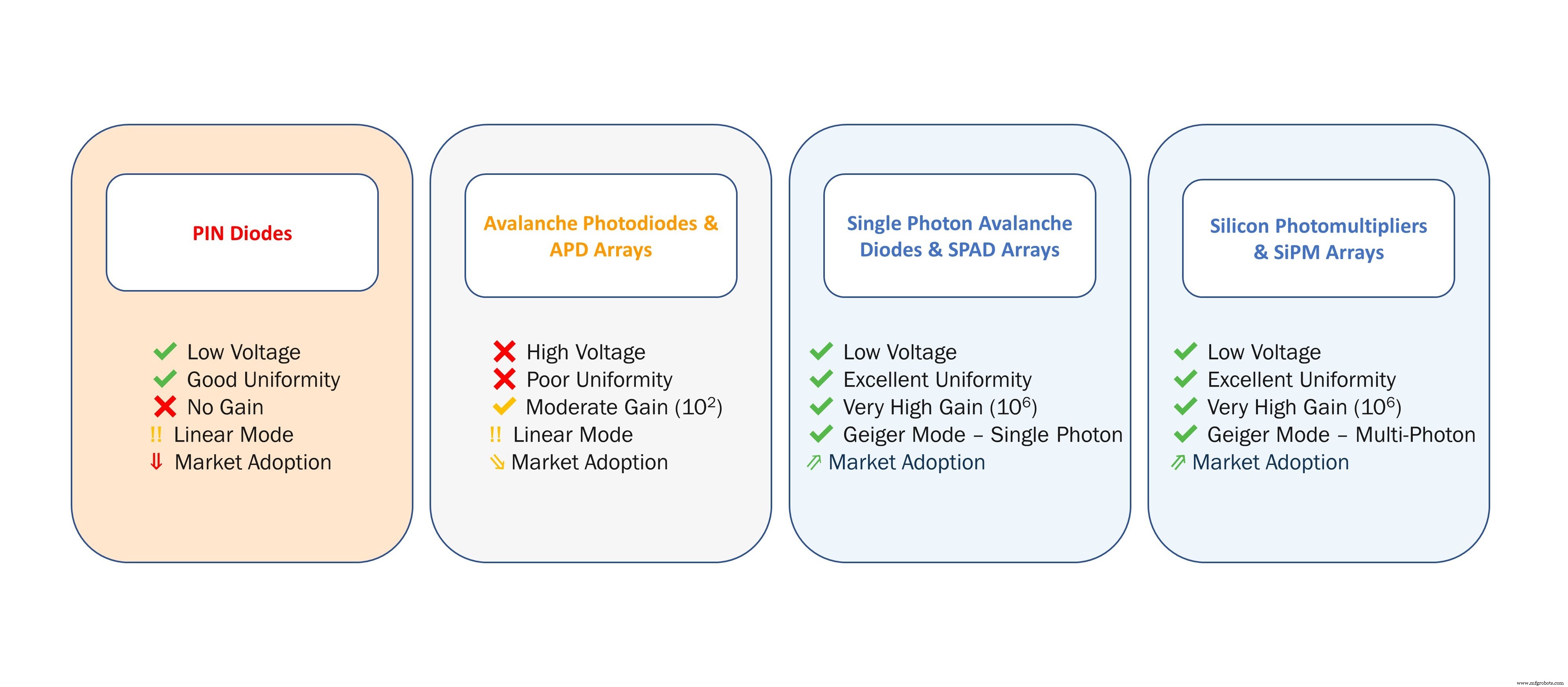
LiDAR awal menggunakan fotodioda PIN sebagai sensor. Fotodioda PIN tidak memiliki penguatan bawaan dan akibatnya, tidak dapat mendeteksi sinyal lemah dengan mudah. Fotodioda longsoran (APD) adalah jenis sensor yang paling menonjol yang digunakan di LiDAR saat ini dan memberikan penguatan dalam jumlah sedang. Namun, APD juga perlu beroperasi dalam mode linier seperti fotodioda PIN untuk mengintegrasikan sinyal dari kedatangan foton dan juga mengalami keseragaman bagian ke bagian yang buruk, sementara membutuhkan tegangan bias yang sangat tinggi. Jenis sensor terbaru yang semakin banyak digunakan di LiDAR dibangun di atas dioda avalanche foton tunggal (SPAD), yang memiliki penguatan sangat besar dan mampu menghasilkan keluaran arus terukur dari setiap foton yang terdeteksi. Silicon photomultipliers (SiPMs) adalah susunan SPAD berbasis silikon yang hadir dengan keuntungan tambahan karena dapat membedakan foton tunggal dari beberapa foton dengan melihat amplitudo sinyal yang dihasilkan.
Gambar 4:Berbagai jenis fotodetektor yang digunakan untuk mendeteksi sinyal dalam LiDAR
Berputar kembali ke relevansi dengan topik panjang gelombang, semua jenis fotodetektor ini dapat dibangun di atas silikon (untuk deteksi NIR) atau semikonduktor III/V (untuk deteksi SWIR). Di sisi lain, kemampuan manufaktur dan biaya adalah kunci untuk kelangsungan teknologi, dan pengecoran silikon CMOS memungkinkan pembuatan sensor tersebut dengan volume tinggi dan biaya rendah. Ini adalah alasan utama mengapa SiPM semakin diadopsi untuk LiDAR selain memungkinkan kinerja yang lebih tinggi. Sementara APD dan SPAD untuk SWIR ada, sulit untuk mengintegrasikannya dengan logika pembacaan karena fakta bahwa prosesnya tidak berbasis silikon. Terakhir, susunan SPAD dan photomultiplier berbasis III/V (analog dengan SiPM) untuk SWIR belum dikomersialkan, sehingga ketersediaan ekosistem berpihak pada panjang gelombang NIR.
Laser
Menghasilkan foton melibatkan proses yang sama sekali berbeda. Persimpangan p-n semikonduktor sebagai media penguatan dapat digunakan untuk membuat laser; ini dilakukan dengan cara memompa arus melalui sambungan yang menyebabkan emisi resonansi foton saat atom menuju pita energi yang lebih rendah, menghasilkan keluaran sinar laser yang koheren. Laser semikonduktor didasarkan pada bahan celah pita langsung seperti GaAs dan InP, yang efisien untuk menghasilkan foton yang terjadi ketika atom menuju pita energi yang lebih rendah, tidak seperti bahan celah pita tidak langsung seperti silikon.
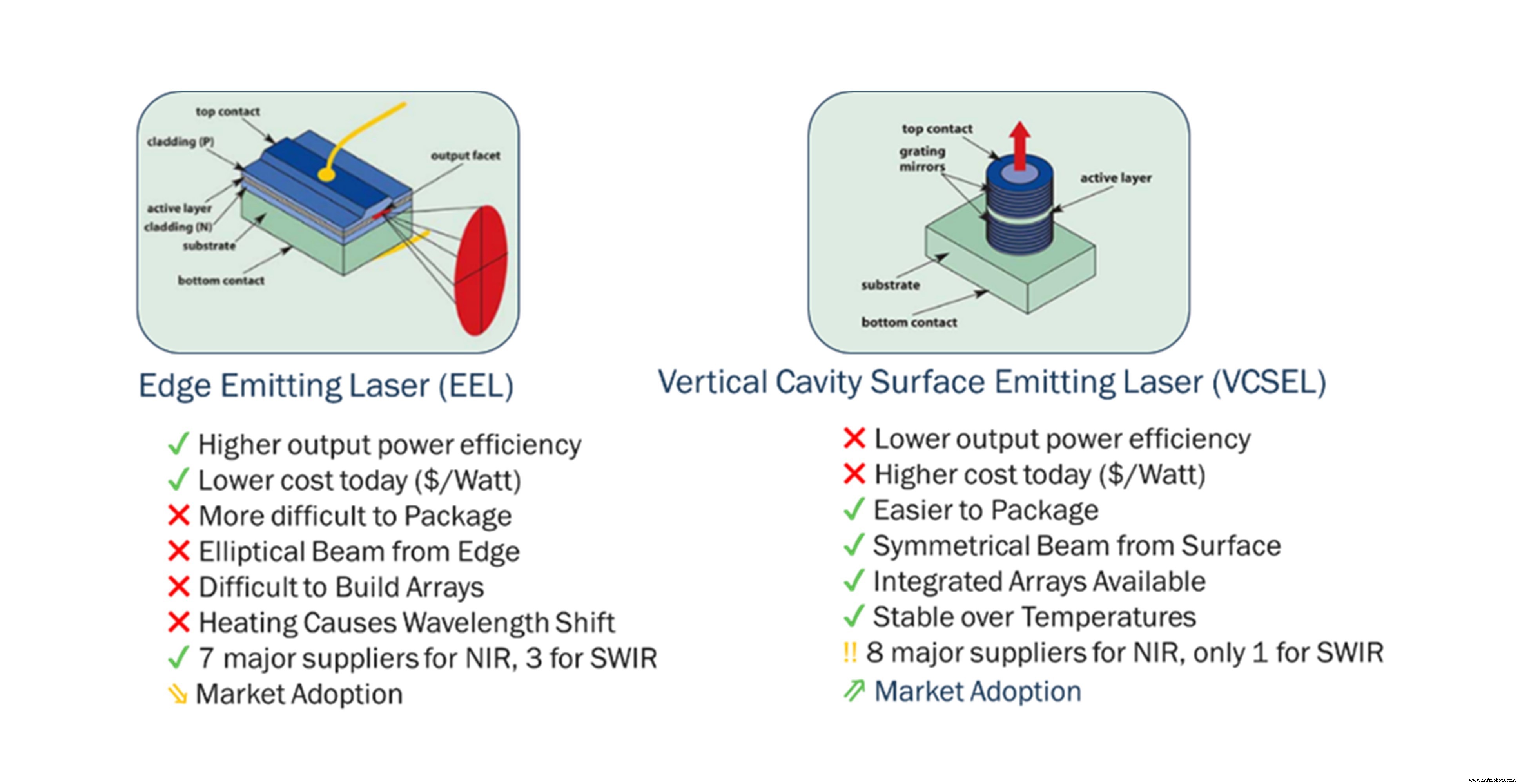
Ada dua jenis utama laser yang digunakan dalam LiDAR:laser pemancar tepi (EEL) dan laser pemancar permukaan rongga vertikal (VCSEL). EEL lebih banyak digunakan saat ini, karena biayanya yang lebih rendah dan efisiensi output yang lebih tinggi daripada VCSEL. Mereka lebih sulit untuk dikemas dan dibangun ke dalam susunan dan juga mengalami pergeseran panjang gelombang melintasi suhu yang menyebabkan detektor harus mencari pita panjang gelombang foton yang lebih luas, memungkinkan lebih banyak foton ambient sebagai noise juga dapat dideteksi. Meskipun biayanya lebih tinggi dan efisiensi dayanya lebih rendah, teknologi VCSEL yang lebih baru memiliki keunggulan pengemasan yang mudah dan efisien karena sinar dihasilkan dari atas. Adopsi pasar VCSEL meningkat karena biayanya akan terus menurun secara signifikan dan efisiensi daya akan meningkat. EEL dan VCSEL ada untuk pembangkitan panjang gelombang NIR dan SWIR, dengan perbedaan utama — panjang gelombang NIR dapat dihasilkan dengan GaAs, sedangkan panjang gelombang SWIR memerlukan penggunaan InGaAsP. Laser GaAs dapat menggunakan pengecoran ukuran wafer yang lebih besar yang mengarah ke biaya yang lebih rendah, sekali lagi menunjukkan keuntungan bagi ekosistem produsen LiDAR NIR dari perspektif biaya dan keamanan rantai pasokan.
klik untuk gambar ukuran penuh Gambar 5:Berbagai jenis laser yang digunakan dalam LiDAR.
Kekuatan Laser dan Keamanan Mata
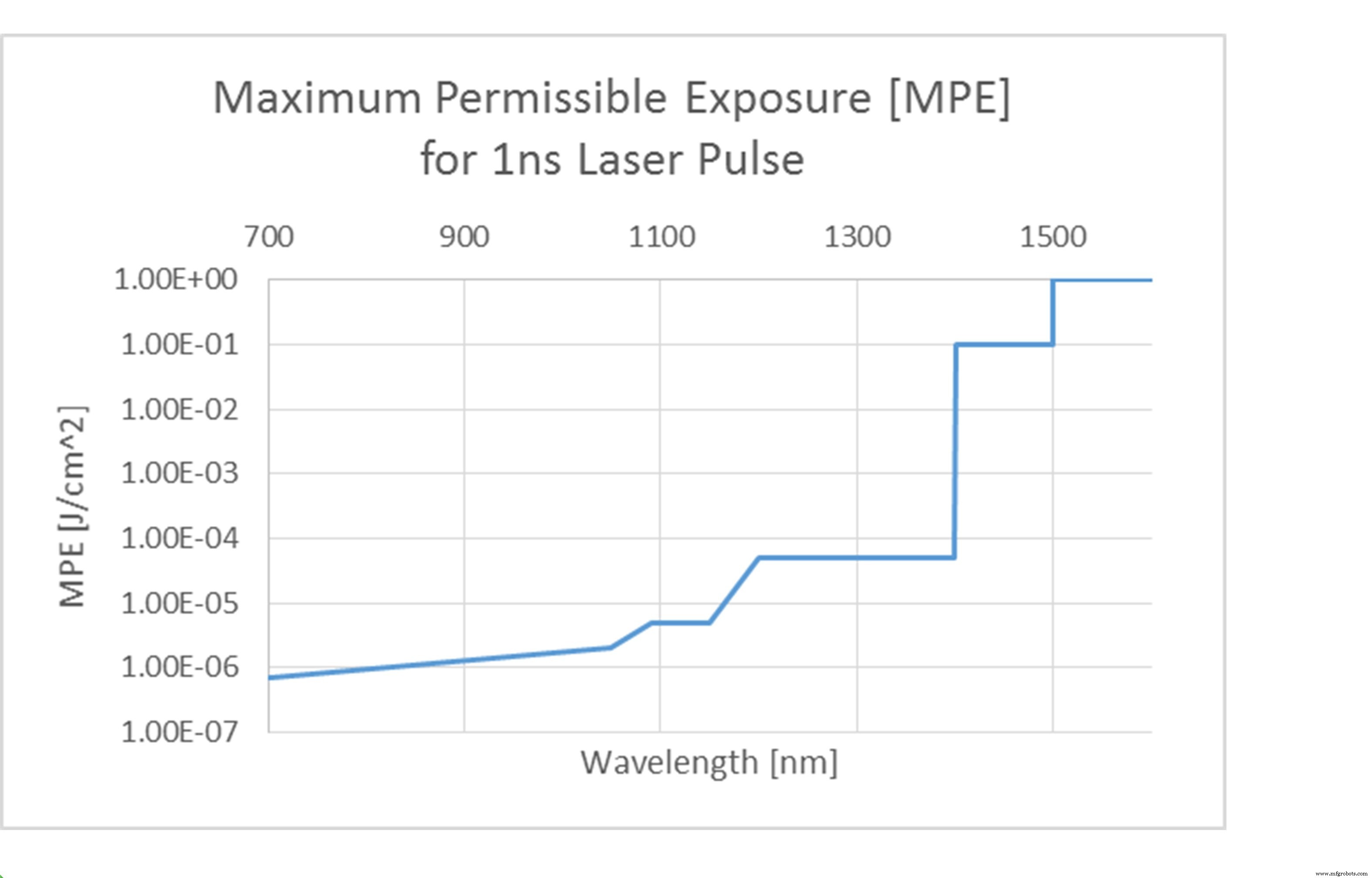
Saat berbicara tentang perdebatan panjang gelombang, sangat penting untuk mempertimbangkan implikasi keamanan mata dari sistem LiDAR. Konsep dToF LiDAR melibatkan penggunaan pulsa laser pendek dengan daya puncak tinggi pada sudut pandang tertentu untuk dipancarkan ke tempat kejadian. Seorang pejalan kaki yang berdiri di jalur jalur emisi LiDAR perlu diyakinkan bahwa mata mereka tidak akan rusak oleh laser yang ditembakkan ke arah mereka, dan IEC-60825 adalah spesifikasi yang menentukan seberapa besar paparan maksimum yang diizinkan di berbagai panjang gelombang cahaya. Sementara cahaya NIR, mirip dengan cahaya tampak, mampu melewati kornea dan mencapai retina di mata manusia, cahaya SWIR sebagian besar diserap di dalam kornea, dan sebagai hasilnya, dapat terpapar pada tingkat yang lebih tinggi.
Gambar 6:Spesifikasi IEC-60825 untuk paparan laser yang aman bagi mata.
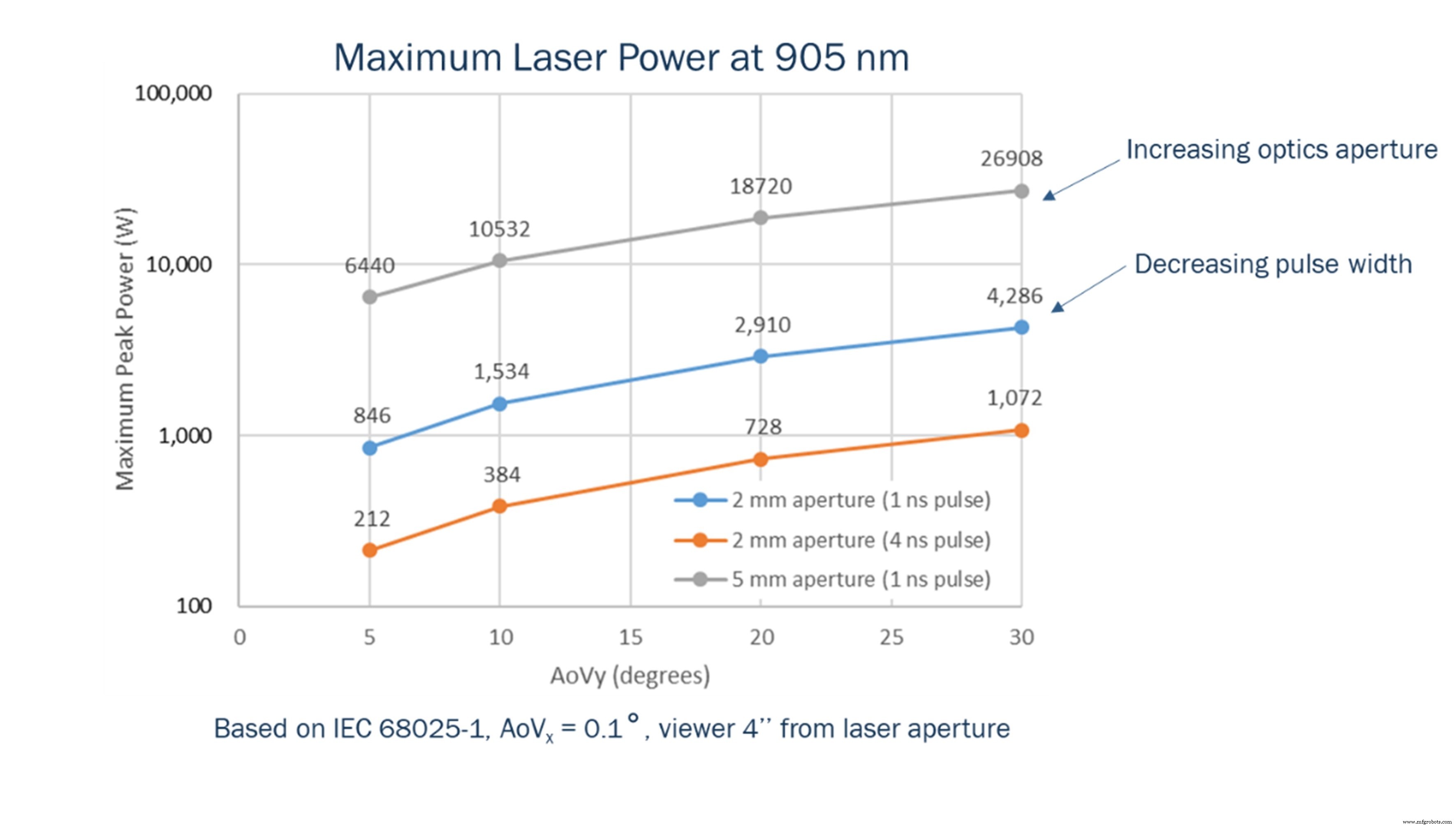
Mampu menghasilkan beberapa kali lipat kekuatan laser yang lebih tinggi merupakan keuntungan bagi sistem berbasis 1550nm dari perspektif kinerja, karena memungkinkan lebih banyak foton dikirim keluar dan dengan demikian dikembalikan untuk dideteksi. Kekuatan laser yang lebih tinggi juga datang dengan tradeoff termal sekalipun. Perlu dicatat bahwa desain mata-aman yang tepat harus dilakukan terlepas dari panjang gelombang dengan secara jelas memperhitungkan energi per pulsa dan ukuran bukaan laser. Dengan LiDAR berbasis 905nm, daya puncak dapat ditingkatkan dengan salah satu faktor ini, seperti yang ditunjukkan pada Gambar 7.
Gambar 7:Desain laser yang aman bagi mata untuk NIR LiDAR dengan optik dan parameter laser yang berbeda.
Perbandingan Sistem LiDAR NIR dan SWIR
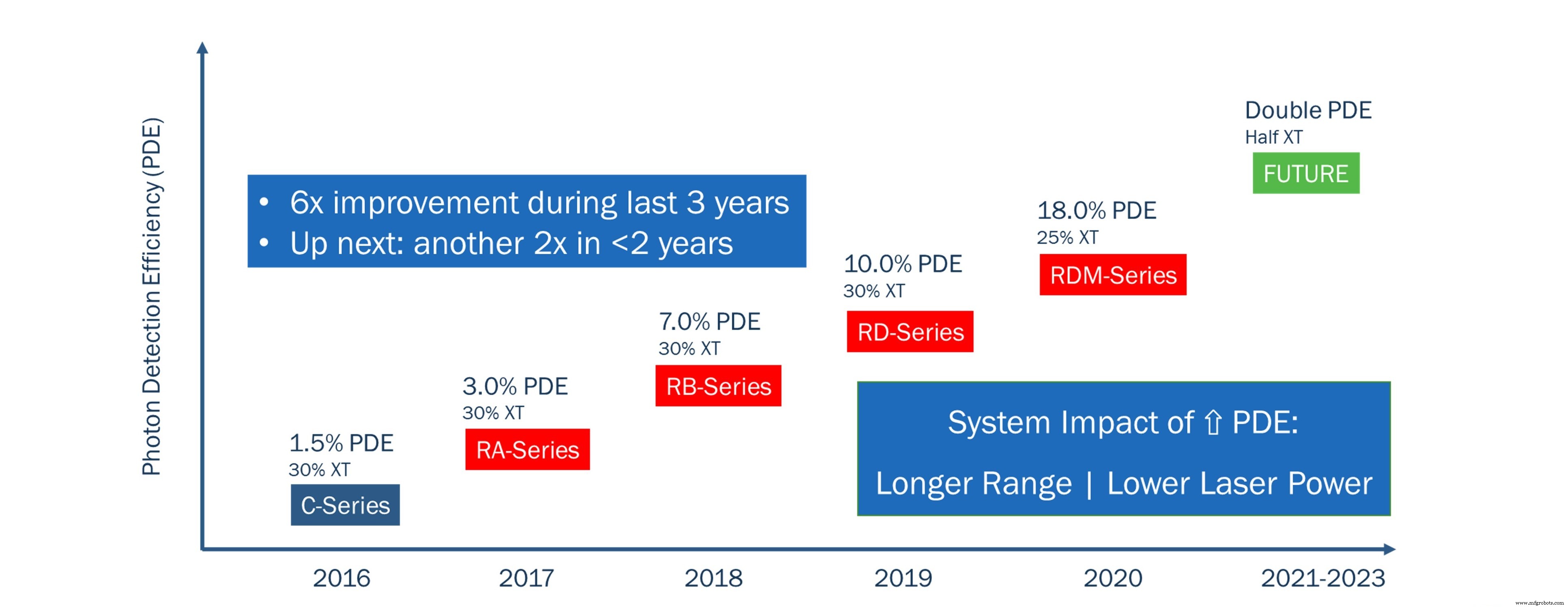
Fokus di atas pada jumlah daya laser yang dapat dihasilkan membawa kita kembali ke sensor yang digunakan. Sensor berperforma lebih tinggi yang mampu mendeteksi sinyal yang lebih lemah jelas akan menguntungkan sistem dalam berbagai cara — karena mampu mencapai jangkauan yang lebih jauh atau mampu menggunakan lebih sedikit daya laser untuk mencapai jangkauan yang sama. ON Semiconductor telah mengembangkan serangkaian SiPM untuk NIR LiDAR yang mendorong efisiensi deteksi foton (PDE) — parameter utama yang menunjukkan sensitivitas — hingga 18% yang memimpin pasar dengan sensor Seri RDM terbaru.
Gambar 8:Peta jalan proses ON Semiconductor SiPMs.
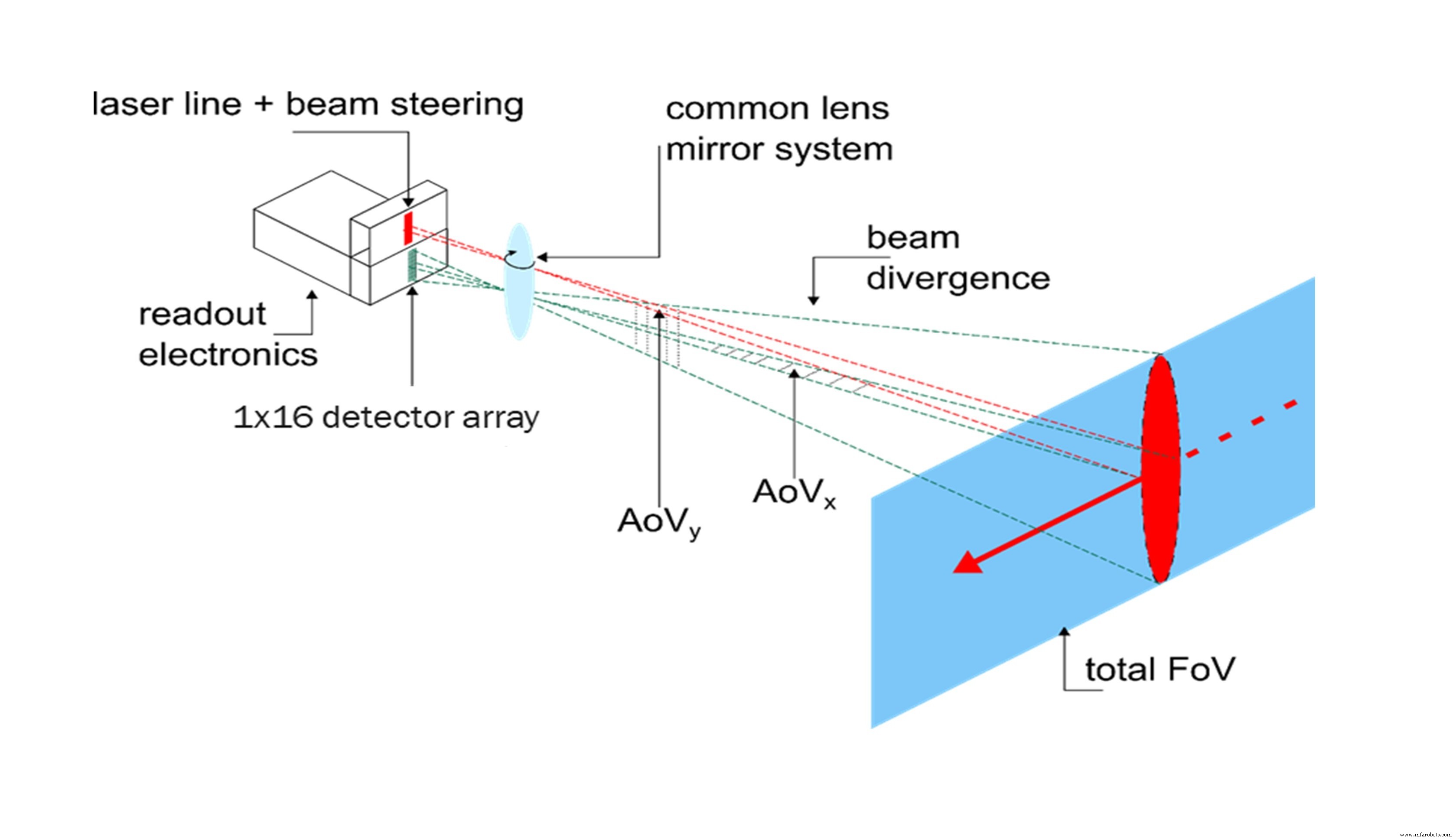
Untuk membandingkan kinerja NIR dToF LiDAR dengan SWIR dToF LiDAR, kami melakukan pemodelan sistem untuk arsitektur LiDAR yang identik dan kondisi lingkungan dengan parameter laser dan sensor yang berbeda. Arsitektur LiDAR adalah sistem koaksial dengan array detektor 16 saluran dan mekanisme pemindaian untuk menyebar ke seluruh bidang pandang, seperti yang ditunjukkan pada Gambar 10. Model sistem ini telah divalidasi dengan perangkat keras dan memungkinkan kami untuk memperkirakan kinerja LiDAR secara akurat sistem.
Gambar 9:Model sistem untuk sensor dToF LiDAR.
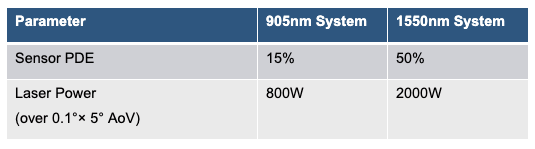
Tabel 2:Sensor LiDAR dan parameter laser untuk simulasi model sistem NIR dan SWIR.
Sistem 1550nm menggunakan jumlah daya laser yang lebih tinggi, serta sensor PDE yang lebih tinggi karena penggunaan paduan InGaAs PDE tinggi, yang seharusnya menghasilkan kinerja yang lebih baik dalam simulasi sistem kami. Menggunakan parameter tingkat sistem cahaya sekitar 100klux yang disaring oleh bandpass 50nm pada lensa sensor (masing-masing berpusat di sekitar 905nm dan 1550nm), sudut pandang 0,1° x 5 ° yang dipindai lebih dari 80 ° secara horizontal pada 30fps, tingkat pengulangan laser 500kHz dengan Lebar pulsa 1ns, dan diameter lensa 22mm, hasilnya ditunjukkan pada Gambar 10.
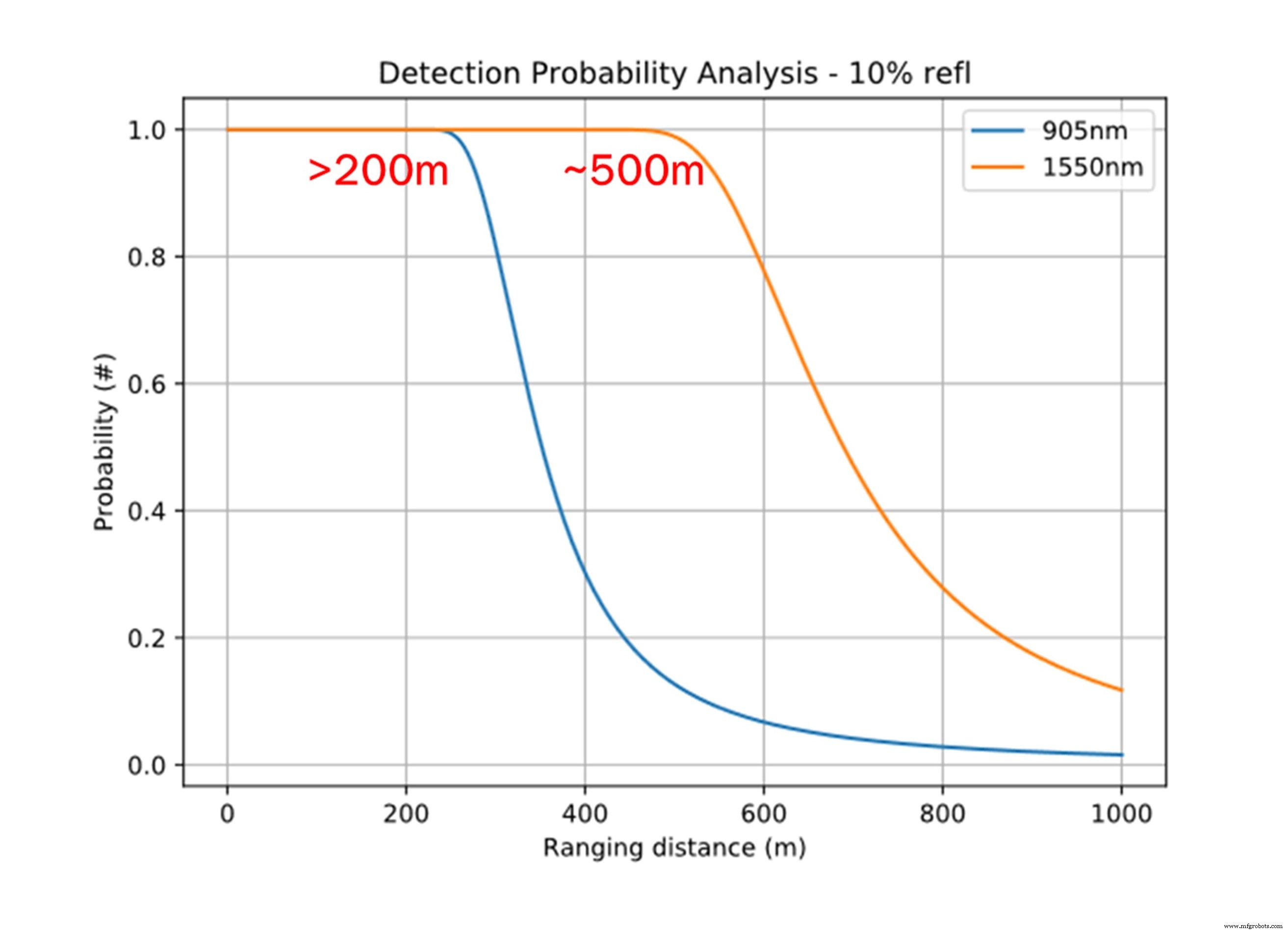
Gambar 10:Hasil simulasi untuk sistem LiDAR serupa berdasarkan 905nm dan 1550nm.
Seperti yang diharapkan, sistem 1550nm mampu menjangkau lebih jauh untuk objek dengan reflektifitas rendah, naik hingga 500m dengan probabilitas jangkauan 99%. Namun, sistem berbasis 905nm masih mencapai jangkauan lebih dari 200m, menunjukkan kedua jenis sistem dapat mencapai persyaratan LiDAR jarak jauh otomotif dalam kondisi lingkungan yang khas. Ketika kondisi lingkungan yang buruk seperti hujan atau kabut diperkenalkan, sifat penyerapan air dari cahaya SWIR menyebabkan kinerjanya menurun lebih cepat daripada sistem berbasis NIR, yang merupakan faktor lain yang harus diperhitungkan.
Pertimbangan Biaya
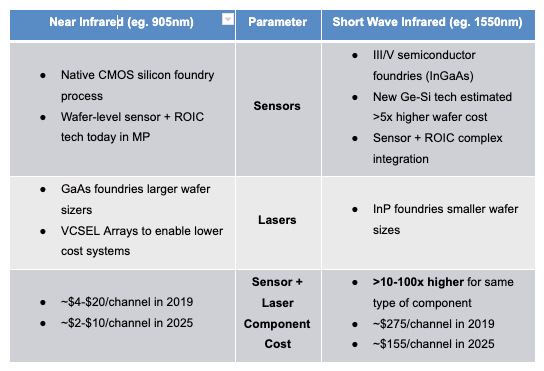
Setelah melihat secara ekstensif teknologi di balik sistem LiDAR, serta implikasi dari penggunaan panjang gelombang yang berbeda, sekarang kita kembali ke faktor pertimbangan biaya. Kami sebelumnya menjelaskan bahwa sensor yang digunakan untuk LiDAR berbasis NIR berasal dari proses pengecoran silikon CMOS asli, yang memungkinkan biaya serendah mungkin untuk semikonduktor. Selain itu, mereka juga memungkinkan integrasi logika pembacaan CMOS dengan sensor ke dalam satu chip dengan menggunakan teknologi stacked die, yang sudah tersedia di pengecoran saat ini, yang selanjutnya meruntuhkan rantai sinyal dan mengurangi biaya. Sebaliknya, sensor SWIR menggunakan pengecoran semikonduktor III/V seperti InGaAs yang berbiaya lebih tinggi dan teknologi Ge-Si hibrida baru — yang memungkinkan sensor SWIR berbiaya lebih rendah — membuat integrasi dengan logika pembacaan lebih mudah tetapi masih diperkirakan lebih dari 5x lebih mahal daripada silikon CMOS tradisional bahkan setelah mencapai kedewasaan. Di sisi laser, perbedaan ukuran wafer antara wafer GaAs yang digunakan untuk membuat chip laser dalam sistem NIR versus wafer InGaAs yang digunakan untuk membuat chip laser dalam sistem SWIR lagi-lagi mengarah pada disparitas biaya, dan fakta bahwa sistem NIR memiliki jalur untuk menggunakan VCSEL dengan basis pemasok yang jauh lebih mudah tersedia juga memungkinkan integrasi berbiaya lebih rendah.
Jumlah total faktor di atas mengarah pada analisis yang dilakukan oleh IHS Markit (Amsrud, 2019), yang menunjukkan bahwa untuk jenis komponen yang sama (sensor atau laser), biaya untuk sistem SWIR akan 10 hingga 100 kali lebih tinggi. daripada sistem NIR. Biaya komponen gabungan rata-rata untuk sensor dan laser untuk sistem NIR diperkirakan antara $4 hingga $20 per saluran pada tahun 2019 dan menurun menjadi $2 hingga $10 pada tahun 2025. Sebaliknya, biaya komponen rata-rata yang setara untuk sistem SWIR diperkirakan menjadi $275 per saluran pada tahun 2019 dan menurun menjadi $155 per saluran pada tahun 2025. Itu adalah perbedaan biaya yang luar biasa ketika mempertimbangkan fakta bahwa sistem LiDAR berisi banyak saluran, bahkan jika menggunakan pendekatan pemindaian 1D karena susunan vertikal saluran titik tunggal masih diperlukan.
Dinamika pasar LiDAR juga tidak mendukung kubu SWIR. Pasar kendaraan otonom tidak meningkat secepat ekspektasi pasar lima tahun lalu, dan sistem otonomi Level 4 dan Level 5, yang mengharuskan LiDAR, masih jauh dari penyebaran massal yang meluas. Sementara itu, pasar industri dan robotika yang menggunakan LiDAR bahkan lebih hemat biaya dan tidak membutuhkan keunggulan kinerja sangat tinggi dari sistem SWIR, sehingga produsen ini tidak memiliki cara untuk membawa komponen biaya turun dengan volume ramping seperti yang sering diklaim. Ada masalah “ayam dan telur” untuk mendapatkan biaya yang lebih rendah saat volume meningkat tetapi membutuhkan biaya yang lebih rendah untuk mendapatkan volume.
Ringkasan
Setelah mendalami teknologi dan perbedaan antara sistem NIR dan SWIR, jelaslah mengapa sebagian besar sistem LiDAR yang ada saat ini menggunakan panjang gelombang NIR. Sementara prospek masa depan tidak pernah 100% pasti, jelas bahwa biaya dan ketersediaan pemasok ekosistem merupakan faktor kunci, dan sistem berbasis NIR pasti akan selalu lebih murah karena keunggulan teknologi dan skala ekonomi untuk silikon CMOS. Dan sementara SWIR memungkinkan sistem LiDAR dengan jangkauan yang lebih panjang, LiDAR berbasis NIR juga dapat mencapai persyaratan otomotif jarak jauh yang diinginkan, sementara juga berkinerja sangat baik untuk konfigurasi jarak pendek hingga menengah yang juga diperlukan di ADAS dan AD. Keberadaan LiDAR berbasis NIR dalam produksi massal untuk pasar otomotif saat ini menunjukkan bahwa teknologi tersebut telah dikomersialkan dan terbukti, tetapi masih perlu beberapa waktu untuk konsolidasi terjadi dan bagi pemenang dan pecundang untuk keluar. Bagaimanapun, industri mobil pada pergantian abad ke-20 terdiri dari 30 pabrikan yang berbeda, dan itu meningkat menjadi hampir 500 selama sepuluh tahun berikutnya — tetapi hanya butuh beberapa tahun setelah itu sebagian besar dari mereka menghilang. Diperkirakan dinamika serupa dapat terjadi dengan produsen LiDAR pada akhir dekade ini.
Referensi
Pengembangan Yole (2020). LiDAR untuk Aplikasi Otomotif dan Industri – Laporan Pasar dan Teknologi 2020
Amsrud, P. (25 September 2019). Perlombaan menuju sistem LIDAR berbiaya rendah [Presentasi Konferensi] . Otomotif LIDAR 2019, Detroit, MI, Amerika Serikat. IHS Markit.
— Bahman Hadji, direktur pengembangan bisnis, divisi sensor otomotif, ON Semiconductor
>> Artikel ini awalnya diterbitkan di situs saudara kami, EE Waktu.
Konten Terkait:
Pakar ADAS mempertimbangkan integrasi sensor di kendaraan masa depan
Kota pintar:kasus lidar dalam sistem transportasi cerdas
Apa yang mendorong perubahan dalam sistem elektronik otomotif
Teknologi waktu penerbangan menjanjikan peningkatan akurasi
Mengapa teknologi penginderaan FIR penting untuk mencapai kendaraan yang sepenuhnya otonom
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tertanam.