Pertimbangan Desain Iluminasi untuk Sistem Penglihatan Bedah Robot
Tujuan dari operasi robotik dan yang dibantu robot adalah untuk memungkinkan ahli bedah melakukan prosedur kompleks yang sebelumnya tidak tersedia dengan presisi yang ditingkatkan yang mengarah pada pengurangan waktu operasi dan pemulihan, serta menurunkan risiko bagi pasien. Bedah robotik telah membuat dampak yang signifikan dalam banyak aplikasi termasuk prostatektomi, nefrektomi, dan bedah kolorektal histerektomi. Dengan kemajuan teknologi terkini, kini ada lebih banyak aplikasi robotika yang sedang dikembangkan daripada sebelumnya.
Untuk meningkatkan alur kerja bedah, akses lokasi, dan waktu pemulihan, inovasi baru muncul di semua subsistem di seluruh arsitektur robot bedah. Meningkatkan kualitas gambar dengan visualisasi yang akurat dan konsisten memungkinkan ahli bedah untuk membuat keputusan bedah yang lebih tepat selama prosedur. Sistem penglihatan bedah cocok dengan kamera bidang pandang lebar dengan serat optik atau komponen iluminasi LED. Namun, seringkali dalam pengembangan produk, persyaratan kinerja dan desain sistem penerangan diberikan waktu dan sumber daya yang jauh lebih sedikit daripada kamera.
Untuk memiliki produk yang sukses, seseorang harus mempertimbangkan semua sub-sistem yang diperlukan untuk memberikan penerangan berkualitas tinggi. Contoh spesifik dari situasi ini adalah laparoskop 3D definisi tinggi yang menggunakan chip di ujung kamera.
Sistem penglihatan bedah 3D memiliki empat subsistem utama:
- Sistem iluminasi, yang membawa cahaya ke target pembedahan,
- Kamera (lensa dan sensor CMOS) untuk menangkap cahaya dari jaringan,
- Firmware untuk mengontrol kualitas dan latensi gambar, dan
- Sistem tampilan (kombinasi tampilan 2D dan 3D).
Setiap subsistem memiliki pertanyaan kuncinya sendiri yang harus dipertimbangkan oleh tim desain.
Aplikasi Klinis
Sebelum merancang sistem penerangan yang kuat, insinyur desain harus memiliki pemahaman yang komprehensif tentang tujuan tim klinis untuk prosedur bedah tertentu. Seringkali, seorang manajer produk yang bertindak sebagai "Suara Pelanggan" akan mengidentifikasi perangkat predikat dan meminta "kualitas gambar terbaik". Tim R&D harus menerjemahkan permintaan ini ke dalam persyaratan kuantitatif, mengidentifikasi modalitas pencitraan dan batas numerik pada FOV, resolusi, akurasi warna, dan kontras gambar sebagai contoh, yang pada akhirnya mengarah pada persyaratan produk yang lengkap. Dalam artikel ini kami akan mempertimbangkan sumber cahaya untuk laparoskop 3D dengan bidang pandang kamera 80° dan jarak kerja 5 hingga 100 mm. Kami terutama akan mempertimbangkan aplikasi cahaya putih tetapi juga akan membahas pertimbangan fluoresensi.
Untuk menjelaskan ini, kami mempertimbangkan di sini desain sistem penerangan berbasis serat, dengan mesin lampu LED yang dipasang di rumah peralatan terbatas sebagai bagian dari "peralatan modal", yaitu menara penglihatan. Peralatan modal meliputi gerobak yang biasanya menampung visi dan sistem kontrol tambahan dari platform bedah. Arsitektur sistem bedah yang dimaksudkan adalah stereo-laparoskop kaku untuk digunakan dalam sistem bedah robotik. Untuk mengurangi risiko terhadap jadwal, keamanan, dan kebutuhan pengguna di masa mendatang dalam mengintegrasikan fluoresensi atau pencitraan bergantung sumber lainnya, kami akan mempertimbangkan solusi berbasis serat. Penulis menghargai kemajuan yang terus dibuat oleh LED dalam ukuran dan efisiensi dan akan membahas ruang desain di akhir artikel.
Pertimbangan Penerangan untuk Bedah Robot
Gambar 1 menyoroti arsitektur sistem utama dari sistem iluminasi untuk platform bedah robotik. Untuk mengirimkan cahaya ke ruang lingkup, sumber penerangan – dalam hal ini, mesin ringan – diperlukan. Mesin ringan akan memasangkan cahaya menjadi serat lancip, jika diperlukan, lalu mengirimkannya ke serat yang akan mentransmisikan cahaya ke ujung.
Mesin ringan adalah sumber cahaya yang dipasang di peralatan modal. Ada arsitektur yang berbeda untuk sumber-sumber ini, tetapi mereka dapat disaring menjadi dua jenis utama. Beberapa mesin ringan akan menggunakan satu sumber broadband, sementara yang lain akan memanfaatkan pencampuran LED pita sempit untuk membuat sumber broadband. LED broadband tunggal memiliki risiko perlu mengoreksi cahaya biru karena arsitektur LED putih yang menggunakan LED biru untuk mengaktifkan fosfor. Sebagian besar cahaya biru diserap oleh jaringan merah. Sinyal biru tinggi dalam spektrum dapat menyebabkan tantangan dalam tahap penyetelan warna dan, berpotensi, gambar yang terlihat terlalu digital atau "tampak palsu". Pendekatan LED RGB campuran dapat menghilangkan masalah cahaya biru berlebih tetapi membutuhkan optik yang lebih kompleks di mesin cahaya untuk memasangkan tiga sumber ke dalam sistem. Jika sistem memerlukan penerangan inframerah dekat (NIR), LED NIR juga dipasang di engine ringan, sehingga memadatkan desain.
Dengan menempatkan LED RGB dan NIR dalam wadah yang sama, sumber cahaya dapat berbagi serat yang sama yang mengantarkan cahaya ke ujung. Ini memaksimalkan efisiensi sistem penerangan endoskop. Untuk mentransfer cahaya dari mesin ringan ke ujung endoskop, diperlukan serat optik aperture angka tinggi (NA) serta sistem optik untuk menyampaikan cahaya dari sumber ke ujung. Istilah untuk menggambarkan output sudut serat adalah aperture numerik, atau NA. Semakin tinggi NA, semakin tinggi output sudut serat. NA sama dengan sinus sudut tertinggi yang dapat masuk dan keluar serat, NA serat ditentukan oleh indeks bias inti dan kelongsong serat. Semakin tinggi NA, semakin tinggi sudut cahaya yang akan keluar dari serat, menerangi persentase bidang pandang yang lebih tinggi.
Untuk mendapatkan kinerja terbaik dari kabel serat optik, tim desain harus mempertimbangkan hubungan antara output mesin ringan dan kabel serat optik. Solusi umum adalah dengan menggunakan serat lancip untuk meningkatkan sudut cahaya memasuki endoskopi. Serat lancip biasanya dipasang di ujung proksimal endoskop di mana kabel cahaya terhubung. Serat lancip mengubah area besar, output sudut rendah dari engine ringan menjadi area kecil, output sudut tinggi.

NA cahaya yang keluar dari kotak cahaya biasanya pada urutan 0,5 NA, sudut yang terkait dengan robotika bedah dapat mencapai 0,87 NA atau lebih tinggi. Serat yang terhubung ke kotak lampu harus sama dengan NA keluar kotak lampu. Lancip akan mengubah cahaya sudut rendah menjadi cahaya sudut tinggi untuk mencapai sudut iluminasi terluas. Gambar 2 menunjukkan apa yang terjadi pada seberkas cahaya yang masuk dan keluar lancip.

Sebuah alternatif untuk menggunakan lancip untuk mencapai sudut keluaran tinggi adalah merancang lensa untuk menyebarkan cahaya keluar dari ujung laparoskop. Sistem iluminasi berbantuan lensa memungkinkan sudut keluaran yang lebih tinggi, memungkinkan kamera FOV lebih tinggi untuk digunakan di dalam bodi, tetapi dengan biaya desain yang kurang ringkas.
Setelah cahaya ditransmisikan ke serat optik laparoskop, serat dikemas untuk menghasilkan cahaya di ujungnya, yang ditunjukkan pada Gambar 3. Ini lebih bermanfaat daripada memiliki satu wajah keluaran cahaya karena dua alasan. Pertama, ini memungkinkan integrasi serat yang lebih mudah ke dalam ruang lingkup, dan kedua mencegah bayangan yang tidak diinginkan dari alat bedah memengaruhi gambar.

Pertimbangan Kalibrasi dan Pengujian
Saat merancang sumber cahaya, tim juga harus mempertimbangkan pipa sinyal gambar (ISP) yang akan mengubah gambar yang diambil dan menampilkannya pada monitor 2D dan 3D definisi tinggi untuk tim bedah. ISP dapat memiliki berbagai kalibrasi yang diterapkan pada sistem, termasuk ketidakseragaman sinyal gelap pada sensor gambar, ketidakseragaman respons foto, kalibrasi warna, dan keseimbangan putih. Kalibrasi ini memungkinkan koreksi yang menghasilkan gambar berkualitas tinggi; namun, jika ISP terlalu bergantung pada kalibrasi, gambar mungkin terlihat sangat diproses dan merupakan gangguan bagi tim bedah.
Sebuah ISP akan memiliki blok yang memerlukan kalibrasi setiap unit. Data kalibrasi biasanya disimpan dalam memori yang terpasang pada endoskopi. Memulai definisi proses kalibrasi lebih awal dan berkoordinasi dengan teknisi pengembangan ISP akan mengurangi risiko masalah pengembangan tahap akhir. Dengan mempertimbangkan ISP dan kalibrasi lebih awal, beberapa revisi sumber cahaya dan firmware dimungkinkan sebelum peluncuran produk. Kalibrasi memang memiliki batasan, dan jika sistem iluminasi dirancang lebih dekat dengan penggunaan bedah yang dimaksudkan, pemecahan masalah kalibrasi dalam proses pengembangan yang diperlukan lebih sedikit.
Contoh kalibrasi yang terkait dengan sumber iluminasi adalah photo-response non-uniformity (PRNU), white balance, dan koreksi warna. Kalibrasi ini semuanya terbatas dalam keefektifannya jika sumber cahaya itu sendiri memiliki desain yang lebih rendah. Ketergantungan pada kalibrasi untuk "memperbaiki" desain sumber cahaya dapat menyebabkan gambar yang dihasilkan terlihat terlalu diproses. Selain itu, jika ISP harus memiliki memori yang dialokasikan untuk kalibrasi, ada risiko peningkatan latensi sistem penglihatan, yang membatasi kinerja robot.
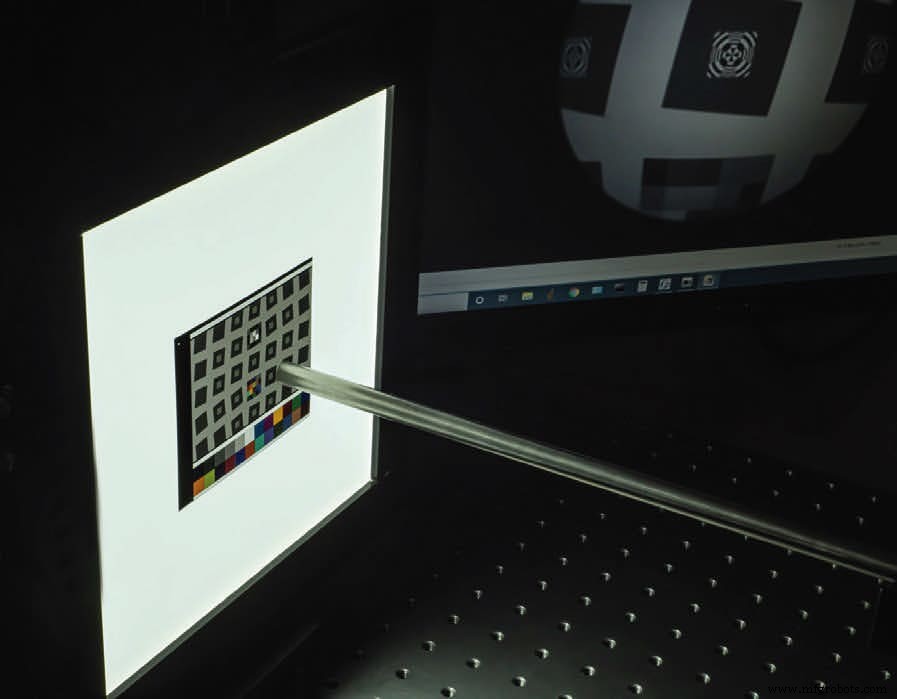
Akhirnya, setelah mesin ringan, iluminasi, optik pencitraan, dan firmware kamera dirancang, pengujian yang tepat diperlukan. Seringkali komponen sistem iluminasi memerlukan inspeksi dan kalibrasi 100% pada sumber di peralatan modal dan juga laparoskop. Pengujian ini memerlukan pengoperasian perangkat yang diuji dalam berbagai kondisi menggunakan target khusus untuk mengukur akurasi warna, keseragaman, dan keluaran daya. Merancang sistem untuk mengotomatisasi pengujian ini mengurangi risiko variabilitas bagian-ke-bagian dan penguji-ke-penguji, memastikan standar produk dipertahankan di lapangan. Stasiun uji ini memerlukan desain mekanis, sistem, dan perangkat lunak yang mendetail untuk memastikannya berhasil diterapkan di lantai produksi.
Ada pertimbangan lain untuk endoskopi, atau aplikasi lingkup fleksibel. Perangkat ini sering memiliki lebih banyak keterbatasan pada ruang yang tersedia untuk penerangan, mungkin hanya memiliki pencitraan 2D, sekali pakai, atau peringatan lain yang tidak berkaitan dengan parameter yang disajikan dalam artikel. Untuk perangkat berdiameter kecil dan sekali pakai, serat plastik, LED di ujungnya, dan solusi lain yang lebih ringkas, dapat menghasilkan produk yang sukses, dengan mempertimbangkan berbagai pertimbangan desain dan mitigasi risiko.
Untuk meringkas, pengembangan komponen iluminasi untuk sistem operasi robotika adalah proses yang kompleks. Seseorang harus mulai dari pemahaman yang lengkap tentang aplikasi klinis dan membangun pemahaman itu. Jika seseorang sedang merancang sistem robot untuk aplikasi cahaya putih dan NIR, kami merekomendasikan desain yang didasarkan pada pemanfaatan serat NA tinggi dengan mesin ringan yang dipasang di peralatan utama. Untuk mencapai sudut iluminasi terluas, penggunaan serat NA tinggi untuk mengirimkan cahaya ke ujung perangkat direkomendasikan. Ini adalah pendekatan desain paling ringkas yang menghindari desain yang terlalu rumit. Solusi lain dapat menyebabkan kesenjangan dalam fungsionalitas, sehingga menghasilkan desain solusi.
Artikel ini ditulis oleh Jonathan Brand, Optical Systems Engineer, dan Neil Anderson, PhD, VP Sales and Marketing, Grey Optics (Portland, ME). Untuk informasi lebih lanjut, hubungi Neil Anderson di Alamat email ini dilindungi dari robot spam. Anda perlu mengaktifkan JavaScript untuk melihatnya., atau kunjungi di sini .


