Pilihan Berlimpah Saat Memilih Sensor untuk Umpan Balik Motor
Dalam banyak aplikasi kontrol gerak, perlu diketahui posisi, kecepatan, dan bahkan mungkin percepatan rotor motor atau bebannya. Tergantung pada aplikasi dan desain spesifik, pengontrol motor mungkin perlu mengetahui parameter ini secara tepat, kira-kira, atau mungkin tidak sama sekali. Dengan mengetahui situasi motor dan status rotor, pengontrol motor memiliki skenario loop tertutup ( Gambar 1).
Tentu saja, kecepatan, posisi, dan akselerasi motor terkait erat. Karena kelajuan adalah turunan (laju perubahan waktu) dari posisi dan percepatan adalah turunan dari kelajuan, maka dimungkinkan untuk menentukan ketiga faktor tersebut, meskipun hanya mengetahui salah satunya (perhatikan juga komplemennya:kelajuan adalah integral dari percepatan dan posisi adalah integral dari kecepatan).

Namun, dalam praktiknya, metode penentuan parameter terkait ini seringkali (tetapi tidak selalu) tidak memadai karena resolusi dan noise. Misalnya, mengetahui rotor telah menyelesaikan putaran lain memberi tahu Anda tentang ketiga variabel tetapi dengan resolusi yang sangat rendah dan biasanya tidak dapat diterima. Tergantung pada aplikasinya, resolusi dan akurasi yang dibutuhkan dapat berkisar dari kasar hingga sedang hingga presisi. Alat mesin CNC membutuhkan informasi rotor yang akurat, pengontrol jendela daya mobil dapat menerima data perkiraan, dan mesin cuci atau pengering pakaian hanya akan puas dengan informasi kasar.
Menutup Pengulangan
Untuk merasakan posisi atau gerakan rotor, opsi yang paling umum adalah resolver, enkoder optik atau kapasitif, dan perangkat efek Hall, dalam urutan presisi, resolusi, dan biaya yang menurun secara kasar. Sensor ini sangat berbeda dalam desain fisik, implementasi, dan antarmuka listriknya, sehingga pengguna harus memahami apa yang dibutuhkan, apa pilihan terbaik dalam aplikasi tertentu, dan bagaimana mereka akan menghubungkan sensor ke sirkuit pengontrol.
Encoder tambahan — digunakan ketika hanya posisi relatif yang diperlukan atau biaya menjadi masalah — biasanya digunakan dengan motor induksi AC. Sebaliknya, encoder absolut — yang memberikan output biner berbeda pada setiap posisi, sehingga posisi poros ditentukan secara mutlak — sering dipasangkan dengan motor brushless magnet permanen dalam aplikasi servo. Aplikasi, tentu saja, adalah faktor utama yang menentukan apakah informasi tambahan atau absolut diperlukan.
Meskipun sebagian besar kontrol motor sekarang dilakukan melalui loop kontrol digital, sinyal sensor itu sendiri semuanya analog dan perlu didigitalkan atau merupakan sinyal digital tetapi dengan voltase dan atribut lain yang membuatnya tidak kompatibel dengan sirkuit digital standar. Meskipun beberapa sensor umpan balik ditawarkan dengan output mentah yang dapat disesuaikan sesuai keinginan, banyak juga yang memiliki output antarmuka siap pakai yang dikondisikan yang kompatibel dengan port, format, dan protokol I/O standar.
Meskipun lebih banyak resolusi mungkin tampak seperti ide yang bagus, dalam praktiknya mungkin tidak demikian. Terlalu banyak hal yang tampaknya baik — resolusi — dapat memperlambat sistem dengan memerlukan pemrosesan informasi ekstra yang tidak diperlukan atau tidak berguna, jadi membatasi resolusi hingga minimum yang diperlukan adalah ide yang bagus.
Resolver
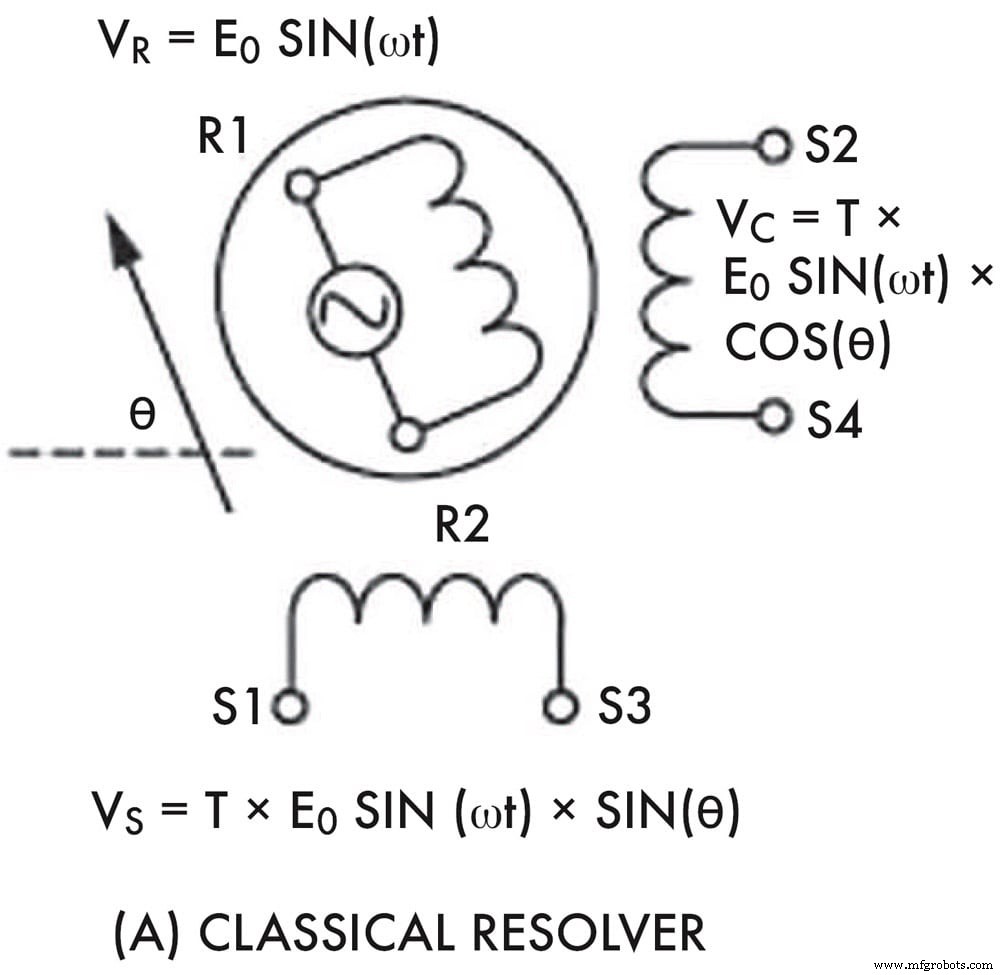
Resolver adalah transduser posisi yang sangat akurat, kokoh, dan absolut. Mereka didasarkan pada prinsip transformator dasar, dengan satu belitan primer ditambah dua belitan sekunder, yang diorientasikan dalam kuadratur (90 °) terhadap satu sama lain ( Gambar 2). Rasio belitan efektif dan polaritas antara gulungan primer dan sekunder bervariasi, tergantung pada sudut poros. Primer dieksitasi dengan bentuk gelombang AC referensi pada frekuensi konstan, yang dapat berkisar dari 50 Hz/60 Hz hingga beberapa ratus kHz, dan output dari belitan sekunder akan keluar fase karena penempatan fisiknya. Tegangan puncak sekunder akan bervariasi saat poros berputar dan akan sebanding dengan sudut poros. Dengan mendemodulasi output ini menggunakan sinyal primer sebagai referensi, sirkuit resolver dapat memberikan pembacaan resolusi tinggi dari sudut poros.
Penyelesai tidak hanya akurat tetapi juga kasar. Resolver tidak memiliki kontak fisik antara sisi primer dan sekunder, tidak ada sikat atau bantalan terpisah selain yang ada di motor itu sendiri, tidak ada titik gesekan yang akan menyebabkan suku cadang aus, dan tidak ada kemungkinan kontaminan (seperti oli) mengganggu Pengoperasian. Resolver digunakan secara luas dalam situasi yang sangat menantang, seperti pengukuran sudut pada senjata militer, karena ketangguhan dan kinerja mekanisnya.
Namun, resolver cenderung berukuran besar dan relatif mahal dibandingkan dengan alternatif dan membutuhkan daya yang relatif besar, yang seringkali tidak dapat diterima dalam aplikasi berdaya rendah. Mereka juga membutuhkan sirkuit yang relatif kompleks untuk pembangkitan dan demodulasi bentuk gelombang AC, meskipun hal ini jauh lebih sedikit hambatan dengan IC modern. Mereka memberikan indikasi posisi mutlak pada power up dan tidak memerlukan gerakan apapun untuk mengindeks atau menentukan sudut awal. Fitur ini harus dimiliki dalam beberapa situasi dan tidak diperhatikan pada situasi lain.
Encoding untuk Posisi, Bukan Data

Encoder optik (istilah encoder di sini tidak terkait dengan pengkodean data digital) dalam pembacaan posisi tambahan menggunakan sumber cahaya (LED), dua fotosensor dalam kuadratur, dan disk kaca atau plastik di antara keduanya ( Gambar 3). Disk memiliki garis-garis halus yang memancar dari pusatnya dan saat berputar, sensor melihat pola terang dan gelap.
Jumlah baris pada disk, dan beberapa teknik lainnya, menentukan resolusi, yang biasanya 1.024, 2.048, atau bahkan setinggi 4.096 hitungan per putaran. Berbeda dengan resolver seperti transformator, encoder optik bukanlah perangkat pasar massal hingga pengembangan LED yang tahan lama dan sensor foto yang efisien.
Susunan fisik sensor memungkinkan encoder menentukan arah rotasi. Sirkuit dasar menerjemahkan rangkaian pulsa dari dua sensor (disebut output A/B) menjadi sepasang aliran bit yang menunjukkan gerakan dan arah ( Gambar 4).

Encoder adalah indikator gerakan inkremental, bukan absolut. Untuk menentukan posisi absolut, kebanyakan encoder menambahkan track ketiga dan photosensor sebagai indikator track referensi nol; poros harus berputar cukup untuk melewati posisi referensi nol untuk sinyal ini. Pembacaan posisi relatif sebenarnya dapat ditambahkan ke encoder optik tetapi ini menambah kerumitan pada unit.
Encoder optik menawarkan resolusi yang sangat baik tetapi tidak sekuat resolver. Kotoran dapat mengganggu jalur optik dan disk encoder dapat menjadi kotor. Namun, kinerjanya lebih dari cukup untuk banyak aplikasi dan ukurannya kecil, ringan, berdaya rendah, mudah untuk berinteraksi, dan berbiaya rendah.
Encoder optik umum untuk aplikasi motor dan rotasi adalah modul dua saluran HEDS-9000 dan HEDS-9100 yang serupa dari Avago Technologies (Broadcom). Modul berperforma tinggi dan berbiaya rendah ini terdiri dari sumber LED dengan lensa dan sirkuit terintegrasi detektor yang terbungkus dalam kemasan plastik kecil berbentuk C, bersama dengan elektronik penggerak dan antarmuka (Gambar 5). Mereka memiliki sumber cahaya yang sangat terkolimasi dan pengaturan fisik fotodetektor khusus, sehingga sangat toleran terhadap ketidaksejajaran pemasangan. (Disk, yang disebut roda kode, dibeli secara terpisah, dengan resolusi 500 CPR dan 1.000 CPR untuk HEDS-9000 dan antara 96 CPR dan 512 CPR untuk HEDS-9100. Modul ini menyediakan dua saluran A dan TTL yang kompatibel B output digital dan memerlukan suplai 5-V tunggal.)

Seri CUI AMT10 adalah alternatif untuk encoder optik, berdasarkan prinsip kapasitif, bukan optik ( Gambar 6). Encoder ini menawarkan berbagai unit modular yang kokoh, akurasi tinggi, tersedia dalam versi inkremental dan absolut, dengan resolusi hingga 12-bit (4.096-hitungan) yang dapat dipilih oleh pengguna dari antara 16 nilai melalui empat posisi, dual in- saklar paket baris (DIP). Output kuadratur A/B yang kompatibel dengan semikonduktor oksida logam komplementer (CMOS) dari unit ini dilaporkan melalui antarmuka periferal serial (SPI) standar.

Tidak seperti encoder optik, perangkat CUI AMT menggunakan pola konduktor yang berulang dan tergores pada bagian encoder yang bergerak dan tidak bergerak. Saat encoder berputar, kapasitansi relatif antara dua bagian meningkat dan menurun dan perubahan kapasitansi ini dirasakan, agak analog dengan output fototransistor dalam encoder optik. Kotoran dan kontaminan lainnya memiliki sedikit efek merugikan di sini.
Perlu diingat bahwa resolver atau encoder juga merupakan perangkat mekanis dengan pertimbangan pemasangan serta persyaratan kompatibilitas listrik. Untuk meminimalkan masalah stok dan inventaris, CUI menawarkan seri AMT10 dengan berbagai macam lengan, penutup, dan dasar pemasangan, sehingga encoder dasar yang sama dapat digunakan di berbagai diameter poros dan pemasangan.
Resolver dan encoder dapat menghasilkan pembacaan dasar dengan resolusi setinggi 1/100 derajat (0,6 menit busur) atau lebih baik tetapi akurasinya tidak sama dengan resolusi (sekali lagi, beberapa aplikasi lebih memperhatikan salah satunya daripada yang lain) . Terlepas dari apakah desain menggunakan resolver atau encoder, sumber kesalahan terjadi karena suhu, kecepatan pelacakan perubahan, pergeseran fasa yang tidak diinginkan, dan faktor lainnya. Namun, vendor unit ini telah menemukan cara untuk menghilangkan, membatalkan, atau mengkompensasi banyak kekurangan ini, seringkali dengan menggunakan sirkuit berbasis IC antara output sensor mentah dan output terkondisi yang masuk ke pengontrol sistem.
Perangkat Hall-Effect Ayo Kuat
Perangkat pengkodean atau sensor kelas lain juga didasarkan pada prinsip usang yang membutuhkan elektronik dan kemasan semikonduktor modern agar terjangkau, tersedia, dan efektif secara luas. Selanjutnya, sirkuit antarmuka kritis, yang dapat menggunakan tegangan sangat kecil dan dengan mudah menghubungkannya ke sistem, sekarang tersedia dalam chip, yang selanjutnya menyederhanakan penggunaan teknologi ini. Perangkat efek hall dapat digunakan untuk merasakan aliran arus melalui konduktor yang merupakan bagian dari sensor, atau ada atau tidak adanya medan magnet di dekatnya.

Apa yang kita kenal sebagai efek Hall ditemukan oleh Edwin Hall pada tahun 1879; perbedaan potensial — tegangan Hall — dihasilkan melintasi konduktor listrik tegak lurus terhadap arus listrik dalam konduktor dan medan magnet yang tegak lurus terhadap arus ( Gambar 7).
Beberapa sensor efek Hall jauh melampaui hanya memasukkan elemen sensor itu sendiri. Sensor posisi Triaxis Melexis MLX90367 adalah IC sensor absolut monolitik yang sensitif terhadap kerapatan fluks yang diterapkan secara ortogonal dan paralel dengan permukaan IC. Ini sensitif terhadap tiga komponen kerapatan fluks, yang memungkinkan MLX90367 (dengan sirkuit magnetik yang benar) untuk memecahkan kode posisi absolut dari setiap magnet yang bergerak (seperti posisi putar dari 0 hingga 360°).

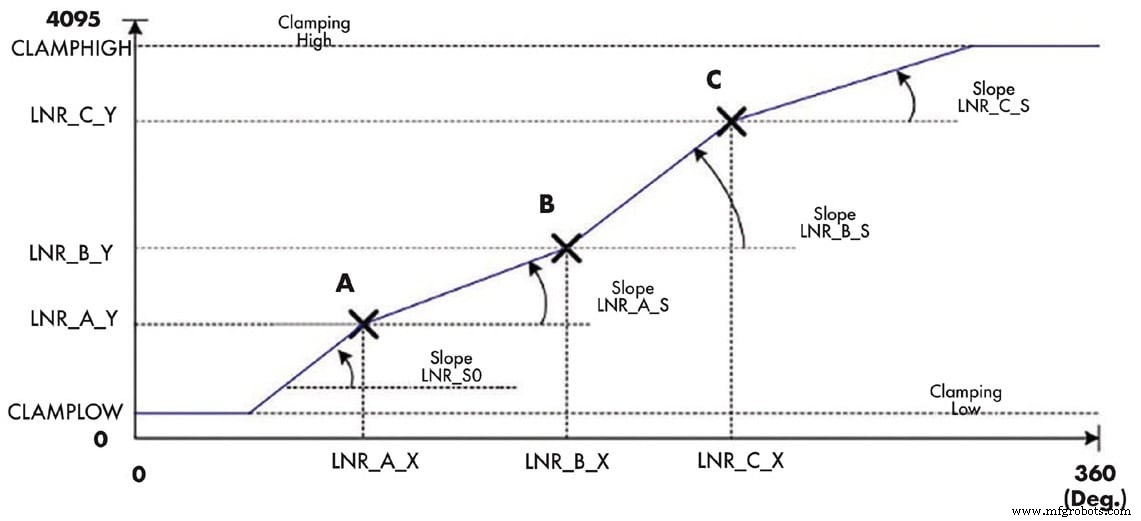
Secara internal, perangkat resolusi 12-bit ini mencakup pemrosesan sinyal on-chip, dengan mikrokontroler dan DSP ( Gambar 8), sehingga dapat melakukan perhitungan yang diperlukan ditambah koreksi untuk nonlinier bawaan dan banyak lagi ( Gambar 9). Ini juga mendukung berbagai fungsi, fitur, dan berbagai format output yang dapat dipilih pengguna termasuk format lanjutan dengan koreksi kesalahan bawaan yang disebut SENT (SAE J2716-2010), yang banyak digunakan dalam aplikasi otomotif.
Sebagian besar enkoder magnetik efek Hall menggunakan roda yang terpasang pada poros motor dan roda tersebut memiliki seperangkat kutub utara dan selatan bermagnet di sekelilingnya; itu adalah analogi magnetik ke roda slotted encoder optik. Roda biasanya dibuat dari ferit cetakan injeksi yang disematkan dengan susunan tiang. Roda tipikal dimagnetisasi dengan 32 kutub (16 utara dan 16 selatan), sehingga resolusinya jauh lebih kecil daripada untuk encoder atau resolver optik tetapi seringkali cukup untuk banyak situasi. Instalasi tipikal memiliki tiga sensor efek Hall, dengan jarak 120° terpisah secara elektrik, untuk mendeteksi pergantian roda.
Ringkasan
Desainer yang harus merasakan posisi, kecepatan, atau akselerasi motor memiliki berbagai pilihan yang mencakup banyak parameter utama dan atribut kinerja. Resolver, encoder optik dan kapasitif, dan perangkat efek Hall semuanya memiliki rekam jejak yang panjang dan terbukti, ditambah dukungan ekstensif melalui pengetahuan aplikasi.
Pilihan dapat didorong oleh satu faktor utama — seperti ketangguhan atau daya rendah — atau oleh penggunaan tradisional dan adat dalam situasi tertentu. Setelah teknologi dasar yang akan digunakan diputuskan, banyak vendor dan suku cadang yang layak dari masing-masing tersedia, sehingga keputusan tentang perangkat tertentu mungkin memerlukan beberapa penelitian untuk lebih memahami pengorbanannya.
Artikel ini ditulis oleh Bill Schweber untuk Mouser Electronics, Mansfield, TX. Untuk informasi lebih lanjut, kunjungi di sini .


