Dengan A.I., Robotic Exoskeletons Mendapatkan Kontrol Diri
Peneliti robotika sedang mengembangkan kaki exoskeleton yang membuat langkah mereka sendiri, menggunakan teknologi kecerdasan buatan (AI) yang canggih. Kaki yang dapat mengendalikan diri suatu hari nanti dapat mendukung gerakan orang tua dan mereka yang cacat fisik.
Sistem, yang dibangun dan diuji oleh para peneliti di University of Waterloo, menggabungkan visi komputer dan pembelajaran mendalam A.I. untuk meniru gaya berjalan seperti manusia. "Belajar" dari kumpulan contoh-jalan di sekitar lingkungan, sistem menyesuaikan gerakannya berdasarkan lingkungan yang dirasakannya.
“Kami memberikan penglihatan pada robot eksoskeleton sehingga mereka dapat mengontrol diri mereka sendiri,” kata Brokoslaw Laschowski , seorang kandidat PhD dalam rekayasa desain sistem yang memimpin proyek penelitian Universitas Waterloo bernama ExoNet .
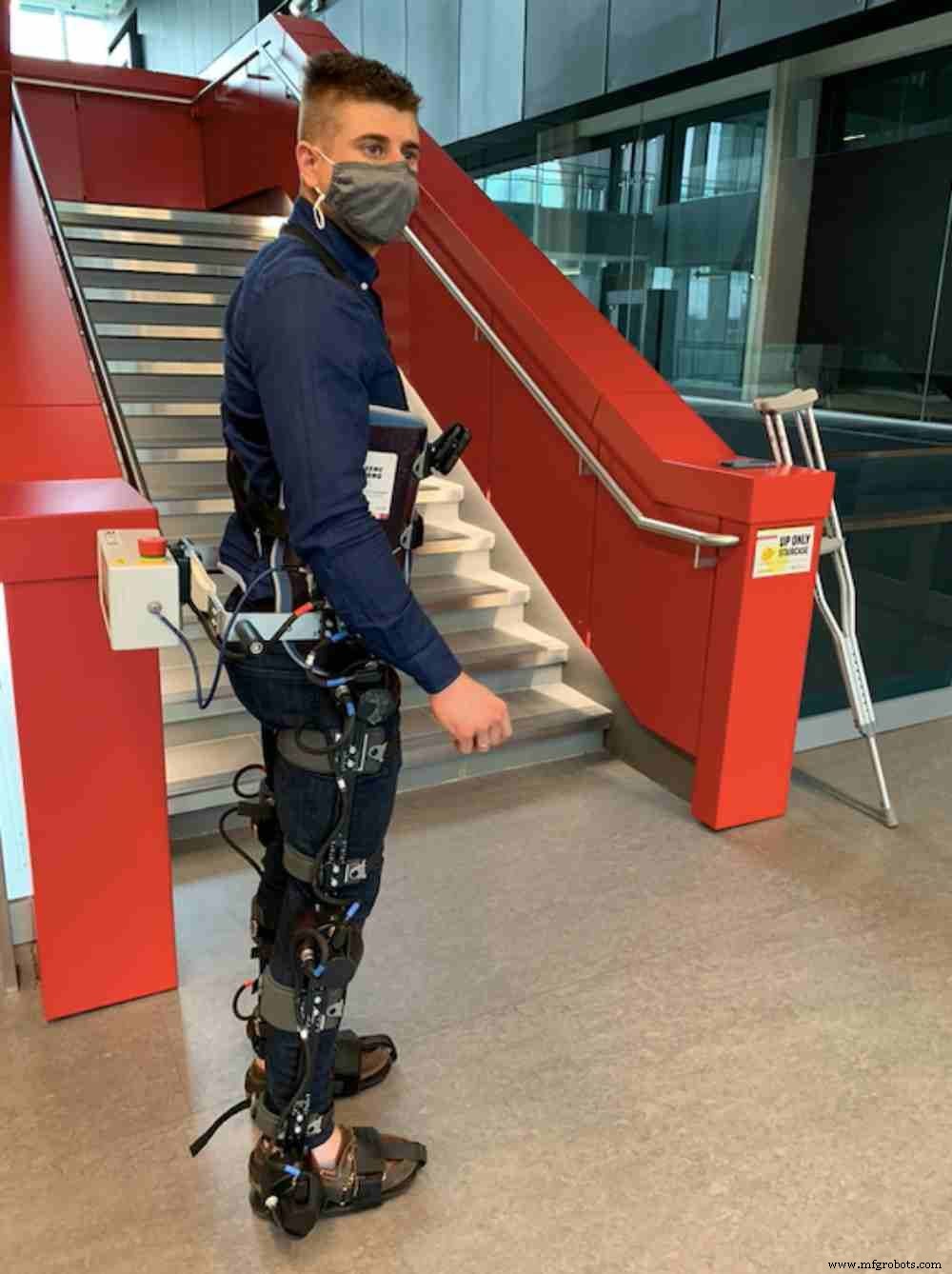
Sistem ExoNet, yang didukung oleh kecerdasan buatan, diambil dari data pelatihan yang dikumpulkan oleh tim. Dengan kamera yang dapat dikenakan yang diikatkan ke dada mereka (seperti yang ditunjukkan pada gambar di atas), Laschowski dan rekan penelitinya mengambil video lingkungan dalam dan luar ruangan.
A.I. perangkat lunak komputer kemudian memproses umpan video untuk mengenali tangga, pintu, dan fitur lain secara akurat di sekitar.
Pencapaian tersebut dirinci dalam jurnal Frontiers in Robotics and AI . (Jelajahi kumpulan data penelitian berkaitan dengan proyek exoskeleton otonom ini.)
Seri makalah terbaru tentang proyek terkait, Simulasi Biomekanik Stand-to-Sit untuk Robotic Exoskeletons dan Prostheses dengan Regenerasi Energi , muncul di jurnal IEEE Transactions on Medical Robotics and Bionics.
Kaki exoskeleton yang dioperasikan dengan motor telah dirancang sebelumnya, tetapi pemakainya hampir selalu membutuhkan aplikasi joystick atau smartphone untuk mengontrol gerakan mereka.
Lebih Banyak Robot di Ringkasan Teknologi
Robot yang dikembangkan di Universitas Tel Aviv "mendengar" sinyal listrik, berkat sensor alami:telinga belalang mati.
Robot baru tidak memerlukan elektronik untuk bergerak — hanya sumber udara bertekanan yang konstan.
“Itu bisa merepotkan dan menuntut kognitif,” kata Laschowski. “Setiap kali Anda ingin melakukan aktivitas lokomotor baru, Anda harus berhenti, keluarkan ponsel cerdas Anda dan pilih mode yang diinginkan.”
Pendekatan dari University of Waterloo menawarkan kontrol yang lebih otomatis, berkat A.I. dan kemampuan visi komputer.
Fase berikutnya dari proyek penelitian ExoNet akan melibatkan pengiriman instruksi ke motor sehingga robot eksoskeleton dapat menaiki tangga, menghindari rintangan, atau mengambil tindakan lain yang sesuai berdasarkan analisis pergerakan pengguna saat ini dan medan yang akan datang.
Selain itu, para peneliti juga bekerja untuk meningkatkan efisiensi energi motor untuk kerangka luar robot dengan menggunakan gerakan manusia untuk mengisi daya baterai sendiri.
“Pendekatan kontrol kami tidak selalu membutuhkan pemikiran manusia,” kata Laschowski, yang diawasi oleh profesor teknik John McPhee , Ketua Riset Kanada dalam Dinamika Sistem Biomekatronik, dalam Grup Riset Geraknya laboratorium. “Mirip dengan mobil otonom yang mengemudi sendiri, kami merancang eksoskeleton otonom yang berjalan sendiri.”
Dalam Tanya Jawab dengan Ringkasan Teknologi di bawah ini, Brokoslaw Laschowski menjelaskan lebih lanjut tentang teknologi ExoNet, dan mengapa exoskeleton yang memiliki fitur yang mirip dengan mobil yang dapat mengemudi sendiri juga harus menyertakan langkah-langkah keamanan seperti kendaraan.
Ringkasan Teknologi : Bagaimana Anda memastikan keamanan? Bisakah pengguna mengambil kendali jika exoskeleton secara keliru melakukan sesuatu yang berbahaya? Analoginya adalah ADAS vs kendaraan yang sepenuhnya otonom. Bagaimana pengguna mengontrol kecepatan dan berhenti dan pergi? Bagaimana kontrol tersebut berinteraksi dengan pengguna?
Brokoslaw Laschowski :Keselamatan adalah yang paling penting. Perangkat robot ini dirancang untuk membantu lansia dan penyandang disabilitas fisik (misalnya, stroke, cedera tulang belakang, palsi serebral, osteoartritis, dll). Kami tidak mampu membuat kerangka luar untuk membuat keputusan yang salah dan berpotensi menyebabkan jatuh atau cedera. Akibatnya, kami berfokus sepenuhnya pada peningkatan akurasi dan kontrol klasifikasi dengan mengembangkan sistem pengenalan lingkungan untuk memungkinkan eksoskeleton secara mandiri merasakan dan bereaksi secara real-time terhadap lingkungan berjalan. Kami mengoptimalkan kinerja sistem menggunakan komputer dan prototipe yang dapat dikenakan dengan kontrol "sehat" sebelum pengujian klinis. Namun, pengguna exoskeleton akan selalu memiliki kemampuan untuk mengambil alih kontrol manual (misalnya, berhenti dan mengemudi).
Ringkasan Teknologi :Bisakah Anda membawa saya melalui sebuah aplikasi yang Anda bayangkan untuk jenis exoskeleton ini? Di mana ini akan menjadi yang paling berharga?
Brokoslaw Laschowski :Perangkat robot ini dirancang untuk membantu lansia dan penyandang disabilitas fisik dengan aktivitas lokomotor. Contoh penerapan sistem kontrol otomatis adaptif lingkungan kami adalah beralih di antara aktivitas lokomotor yang berbeda. Dalam exoskeleton yang tersedia secara komersial, ketika transisi untuk berjalan di permukaan tanah ke menaiki tangga, misalnya, pengguna mendekati tangga, berhenti, dan secara manual mengomunikasikan ke exoskeleton aktivitas yang dimaksud menggunakan antarmuka seluler, tombol tekan, atau kontrol tangan lainnya. (tergantung perangkatnya).
Sebaliknya, dengan sistem kontrol otonom, saat pengguna mendekati tangga miring, sensor onboard seperti unit pengukuran inersia (IMU) terus-menerus merasakan dan mengklasifikasikan gerakan pengguna saat ini, dan sistem kamera yang dapat dikenakan mendeteksi dan mengklasifikasikan medan yang akan datang. Penggabungan berbagai teknologi sensor dan algoritme pengenalan pola ini digunakan untuk memprediksi maksud lokomotor pengguna dan mengontrol kerangka luar.
Ringkasan Teknologi :Bagaimana kerangka luar "dilatih" untuk beroperasi tanpa pemikiran manusia?
Brokoslaw Laschowski :Kami menggunakan visi komputer dan pembelajaran mendalam untuk klasifikasi lingkungan. Menggunakan jutaan gambar dunia nyata, jaringan saraf convolutional kami secara otomatis dan efisien dilatih untuk memprediksi berbagai lingkungan berjalan yang ditampilkan dalam gambar. Informasi tentang lingkungan berjalan ini selanjutnya digunakan untuk mengontrol kerangka luar robot dalam hal perencanaan jalur yang optimal, penghindaran rintangan, dan peralihan antara aktivitas lokomotor yang berbeda (misalnya, berjalan di permukaan tanah hingga menaiki tangga).
Ringkasan Teknologi :Apa selanjutnya untuk kerangka luar ini? Apa yang sedang Anda kerjakan sekarang?
Brokoslaw Laschowski :Dari perspektif kritis keselamatan, sistem kontrol exoskeleton bertenaga AI ini perlu bekerja secara akurat dan real-time. Oleh karena itu, kami berfokus pada peningkatan akurasi klasifikasi lingkungan sambil menggunakan arsitektur jaringan saraf dengan komputasi minimal dan persyaratan penyimpanan memori untuk mempromosikan inferensi real-time onboard.
Bagaimana menurutmu? Bagikan pertanyaan dan komentar Anda.


