Columbia mengembangkan 'bantuan dukungan batang tubuh robotik' untuk orang dengan cedera tulang belakang
Para insinyur di universitas Columbia telah menemukan pelatih pendukung batang robotik untuk melatih kembali pasien dengan cedera tulang belakang agar duduk lebih stabil dan mendapatkan ruang kerja duduk aktif yang diperluas. (Lihat video di bawah.)
Cedera tulang belakang (SCI) dapat menyebabkan kerusakan parah, termasuk hilangnya mobilitas dan sensasi. Setiap tahun, diperkirakan ada 17.000 SCI baru di AS saja, tingkat yang lebih tinggi daripada di sebagian besar wilayah di dunia.
Selain itu, tingkat SCI pada orang 65 tahun atau lebih diperkirakan akan meningkat di AS, dari 13 persen pada 2010 menjadi 16,1 persen pada 2020.
Data juga menunjukkan tingkat kelangsungan hidup yang tinggi untuk pasien ini, yang perlu berfungsi dalam kehidupan sehari-hari tetapi menganggap duduk sebagai tantangan utama.
Tim Columbia Engineering telah menemukan perangkat robot – Trunk-Support Trainer (TruST) – yang dapat digunakan untuk membantu dan melatih orang-orang dengan SCI untuk duduk lebih stabil dengan meningkatkan kontrol bagasi mereka, dan mendapatkan ruang kerja duduk aktif yang diperluas tanpa terjatuh atau menggunakan tangan mereka untuk menyeimbangkan.
Penelitian, yang diterbitkan hari ini di Spinal Cord Series and Cases, adalah yang pertama mengukur dan menentukan ruang kerja duduk pasien dengan SCI berdasarkan kontrol batang aktif mereka.
Sunil Agrawal, PI proyek dan profesor teknik mesin dan rehabilitasi dan pengobatan regeneratif, mengatakan:“Kami merancang TruST untuk orang-orang dengan SCI yang biasanya pengguna kursi roda.
“Kami menemukan bahwa TruST tidak hanya mencegah pasien jatuh, tetapi juga memaksimalkan gerakan batang tubuh di luar kendali postural pasien, atau batas keseimbangan.”
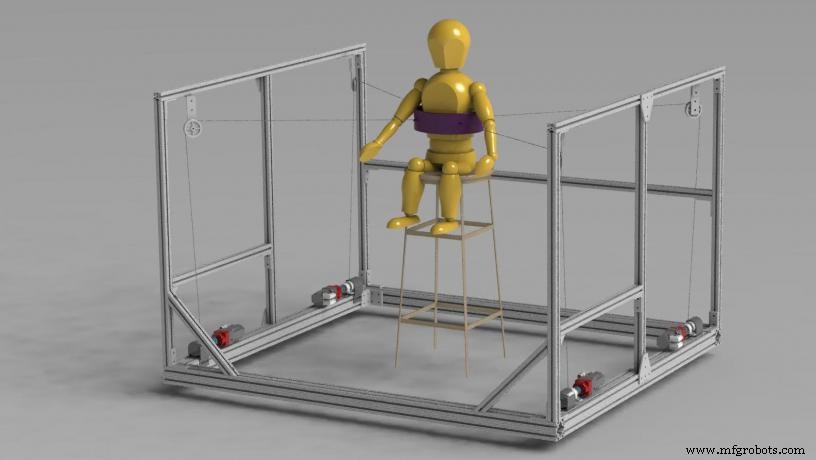
TruST adalah sabuk penggerak kabel bermotor yang ditempatkan di tubuh pengguna untuk menentukan batas kontrol postural dan area ruang kerja duduk pada orang dengan SCI. Ini memberikan kekuatan pada batang tubuh saat pengguna melakukan gerakan tubuh bagian atas di luar batas stabilitas postural saat duduk.
Lima subjek dengan SCI yang berpartisipasi dalam studi percontohan diperiksa dengan Postural Star-Sitting Test, tes postur khusus yang mengharuskan mereka untuk mengikuti bola dengan kepala mereka dan menggerakkan belalai mereka sejauh mungkin, tanpa menggunakan tangan mereka.
Tes diulang dalam delapan arah, dan para peneliti menggunakan hasilnya untuk menghitung ruang kerja duduk setiap individu.
Tim kemudian menyesuaikan TruST untuk setiap subjek untuk menerapkan medan gaya bantu yang dipersonalisasi pada batang tubuh sementara subjek melakukan gerakan yang sama lagi.
Dengan TruST, subjek dapat menjangkau lebih jauh selama perjalanan bagasi di delapan arah dan secara signifikan memperluas ruang kerja duduk di sekitar tubuh mereka, rata-rata sekitar 25 persen lebih banyak.
Victor Santamaria, seorang ahli terapi fisik, peneliti pascadoktoral di Laboratorium Robotika dan Rehabilitasi Agrawal, dan penulis pertama makalah ini, mengatakan:“Kapasitas TruST untuk memberikan umpan balik paksa berkelanjutan yang dipersonalisasi untuk batas postural pengguna membuka batas baru untuk menerapkan pembelajaran motorik- paradigma berbasis untuk melatih duduk fungsional pada orang dengan SCI.
“Menurut kami TruST adalah alat rehabilitasi SCI yang sangat menjanjikan.”
Tim Agrawal sekarang sedang mengeksplorasi penggunaan TruST dalam paradigma pelatihan untuk meningkatkan kontrol batang tubuh orang dewasa dan anak-anak dengan cedera tulang belakang.
Agrawal mengatakan:“Platform robot akan digunakan untuk melatih peserta dengan SCI dengan menantang mereka untuk memindahkan bagasi mereka di atas ruang kerja yang lebih besar, dengan TruST menyediakan medan gaya bantuan sesuai kebutuhan untuk membawa subjek kembali ke posisi duduk netral dengan aman.
“Force field ini akan disesuaikan dengan kebutuhan para peserta dari waktu ke waktu karena mereka meningkatkan ruang kerja dan kontrol postur mereka.”


