Perbedaan Antara Paralel Helical Gear dan Crossed Helical Gear
Penggerak mekanis digunakan untuk mentransmisikan gerakan, torsi, dan daya dari poros penggerak ke poros yang digerakkan. Poros penggerak, dalam sebagian besar kasus, adalah bagian dari penggerak utama (seperti motor listrik, turbin hidrolik, turbin uap, dll.); sedangkan poros penggerak merupakan bagian dari unit mesin. Ada empat penggerak mekanis dasar, yaitu penggerak roda gigi, penggerak sabuk, penggerak rantai, dan penggerak tali. Penggerak roda gigi adalah salah satu penggerak kaku tipe pengikatan di mana gerakan dan daya ditransmisikan melalui pengikatan dan pelepasan gigi secara berurutan dari dua roda gigi yang berpasangan. Ini secara inheren bebas dari slip dan ini memberikan rasio kecepatan konstan (drive positif). Ini dapat digunakan untuk aplikasi tugas ringan (seperti mainan, jam tangan, dll.) serta untuk aplikasi tugas berat (seperti kotak roda gigi mesin, penggerak laut, dll.).
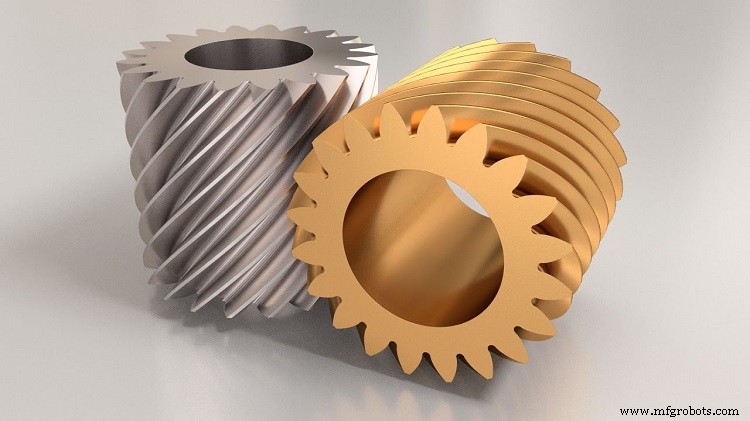
Poros penggerak dan poros penggerak dapat memiliki tiga orientasi bersama, yaitu (i) poros paralel, (ii) poros berpotongan dan (iii) poros non-paralel yang tidak berpotongan. Ada empat tipe dasar roda gigi dan roda gigi yang sesuai harus dipilih berdasarkan orientasi timbal balik antara poros penggerak dan poros yang digerakkan. Roda gigi pacu dan roda gigi heliks berlaku untuk poros paralel. Roda gigi bevel dapat diterapkan untuk dua poros yang berpotongan, yang mungkin tidak harus tegak lurus. Susunan roda gigi cacing digunakan untuk kategori ketiga (poros tidak berpotongan non-paralel). Tidak seperti roda gigi pacu yang memiliki gigi lurus sejajar dengan sumbu roda gigi, roda gigi heliks memiliki gigi berbentuk heliks yang dipotong pada silinder pitch. Meskipun roda gigi heliks biasanya digunakan untuk poros paralel seperti roda gigi taji, roda gigi heliks juga dapat digunakan untuk poros tegak lurus tetapi tidak berpotongan.
Oleh karena itu, ada dua jenis roda gigi heliks—paralel dan silang. Roda gigi heliks paralel , yang umum, digunakan untuk transmisi daya antara poros paralel. Dua roda gigi heliks paralel yang berpasangan harus memiliki modul yang sama, sudut tekanan yang sama tetapi tangan yang berlawanan dari heliks. Mereka menawarkan operasi yang bebas getaran dan senyap dan dapat mengirimkan beban berat. Di sisi lain, roda gigi heliks silang digunakan untuk poros yang tidak berpotongan tetapi tegak lurus. Dua roda gigi heliks bersilangan (juga disebut roda gigi sekrup) harus memiliki modul yang sama, sudut tekanan yang sama dan tangan heliks yang sama atau berlawanan. Jenis roda gigi ini memiliki aplikasi yang mirip dengan roda gigi cacing; namun, roda gigi cacing lebih disukai untuk pengurangan kecepatan curam (1:15 hingga 1:100), sedangkan roda gigi heliks silang tidak dapat memberikan pengurangan kecepatan melebihi 1:2. Berbagai perbedaan antara gigi heliks paralel dan gigi heliks silang diberikan di bawah ini dalam format tabel.
Tabel:Perbedaan antara roda gigi heliks paralel dan roda gigi heliks silang
Gigi Heliks Paralel
Perlengkapan Heliks Silang
Roda gigi heliks paralel hanya dapat mentransmisikan gerakan dan daya antara poros paralel.
Roda gigi heliks silang dapat mentransmisikan gerakan dan daya antara poros yang tegak lurus tetapi tidak berpotongan.
Dua roda gigi kawin harus dipasang pada dua poros paralel.
Dua roda gigi kawin dipasang pada dua poros yang tegak lurus tetapi tidak berpotongan.
Dua roda gigi yang berpasangan harus memiliki sudut heliks yang sama tetapi berlawanan dengan sisi heliks.
Dua roda gigi yang berpasangan mungkin memiliki sudut heliks yang berbeda. Mereka mungkin memiliki sisi heliks yang sama atau berlawanan.
Pertunangan antara dua gigi dimulai dengan kontak titik tetapi secara bertahap menjadi kontak garis.
Dua gigi yang saling bertautan selalu memiliki kontak titik.
Kapasitas transmisi daya gigi heliks paralel lebih tinggi karena kontak yang lebih luas.
Gigi heliks silang memiliki kapasitas transmisi daya yang lebih rendah karena kontak titik.
Ini memiliki area aplikasi yang luas mulai dari peralatan kecil hingga bidang industri besar termasuk kereta roda gigi.
Jarang digunakan pada instrumen ukuran kecil.
Transmisi daya dan orientasi poros: Kecuali sabuk seperempat putaran, penggerak roda gigi hanyalah penggerak mekanis yang dapat digunakan secara menguntungkan untuk mentransmisikan daya dan gerakan pada sudut mana pun pada bidang apa pun. Berbagai jenis roda gigi lebih disukai untuk berbagai orientasi poros penggerak dan penggerak. Mirip dengan roda gigi pacu, roda gigi heliks paralel hanya dapat mentransmisikan gerakan dan daya antara poros paralel. Oleh karena itu mereka harus dipasang pada poros paralel dengan keselarasan lokasi dan sudut yang tepat. Di sisi lain, roda gigi heliks silang atau roda gigi sekrup dapat mentransmisikan gerakan dan daya antara poros tegak lurus dan oleh karena itu harus dipasang pada poros tegak lurus tetapi tidak berpotongan.
Tangan heliks: Terlepas dari pengaturan paralel atau silang, dua roda gigi heliks kawin harus memiliki modul yang sama, sudut tekanan yang sama dan sudut heliks yang sama. Diameter lingkaran pitch dari dua roda gigi kawin juga harus menyentuh pada satu titik. Sekarang, jika roda gigi heliks kawin memiliki susunan paralel, maka satu roda gigi harus memiliki heliks tangan kanan dan roda gigi lainnya wajib memiliki heliks tangan kiri. Dengan demikian, dua roda gigi heliks paralel yang berpasangan harus memiliki tangan heliks yang berlawanan. Namun, dalam hal susunan silang, satu roda gigi heliks dengan heliks tangan kanan dapat dikawinkan dengan roda gigi heliks lain yang memiliki heliks tangan kiri atau kanan. Dengan demikian, dua roda gigi heliks yang bersilangan mungkin memiliki sisi heliks yang sama atau berlawanan.
Kontak antar gigi: Berdasarkan profil gigi dan orientasi gigi, kontak antara gigi dari dua gigi kawin terjadi dalam beberapa mode. Misalnya, gigi dari dua roda gigi taji datang secara tiba-tiba dan panjang kontaknya selalu tetap satu garis yang panjangnya sama dengan lebar muka gigi. Kontak mendadak seperti itu digantikan oleh kontak bertahap pada roda gigi heliks. Dalam kasus roda gigi heliks paralel, perkawinan dua gigi dimulai dengan sebuah titik dan secara bertahap menjadi sebuah garis dan kemudian mereka terlepas sebagai sebuah titik. Namun, dalam kasus roda gigi heliks silang, kontak antara dua gigi selalu tetap pada satu titik. Pada awal pertunangan, titik ini terletak di salah satu ujung wajah gigi dan secara bertahap titik kontak bergerak di atas wajah. Saat pelepasan, titik kontak terletak di ujung lain dari wajah gigi.
Kapasitas transmisi daya: Tujuan dasar dari setiap penggerak mekanis adalah untuk mentransmisikan daya dari poros penggerak ke poros yang digerakkan. Menjadi penggerak kaku tipe keterlibatan, penggerak roda gigi memiliki kapasitas transmisi maksimum di antara semua penggerak mekanis. Namun, berbagai jenis penggerak roda gigi menawarkan berbagai tingkat kapasitas transmisi daya. Sepasang roda gigi heliks paralel dapat mengirimkan daya yang relatif lebih tinggi dibandingkan dengan roda gigi pacu berukuran serupa dari bahan yang sama. Berdasarkan ukuran dan bahannya, roda gigi heliks paralel dapat mentransmisikan daya hanya dari beberapa watt hingga beberapa mega watt. Di sisi lain, roda gigi heliks silang lebih disukai untuk transmisi daya kecil, biasanya terbatas pada 100kW.
Area aplikasi: Karena kapasitas transmisi daya yang tinggi, roda gigi heliks paralel secara menguntungkan digunakan di banyak bidang. Hal ini dapat berhasil digunakan untuk kecepatan rendah serta aplikasi kecepatan tinggi. Area aplikasi yang umum termasuk kotak roda gigi mesin, mobil, pabrik minyak, penggerak laut, dll. Di sisi lain, roda gigi heliks silang cocok untuk aplikasi kecepatan rendah dan tugas rendah seperti mesin keliling industri tekstil, pompa oli pembakaran internal mesin, dll.
Perbandingan ilmiah antara gigi heliks paralel dan gigi heliks silang disajikan dalam artikel ini. Penulis juga menyarankan Anda untuk membaca referensi berikut untuk pemahaman topik yang lebih baik.
Desain Elemen Mesin oleh V.B. Bhandari (Edisi Keempat; McGraw Hill Education).
Desain Mesin oleh R. L. Norton (edisi Kelima; Pearson Education).
Buku Teks Desain Mesin oleh R. S. Khurmi dan J. K. Gupta (S. Chand; 2014).