Apa itu Motor Stepper? Jenis, Konstruksi, Operasi &Aplikasi
Jenis Motor Stepper – Konstruksi, Operasi Kerja, dan Aplikasinya
Penemuan kartu driver motor stepper khusus dan teknologi kontrol digital lainnya untuk antarmuka motor stepper ke sistem berbasis PC adalah alasan diterimanya motor stepper secara luas belakangan ini. Motor stepper menjadi pilihan ideal untuk sistem otomatisasi yang memerlukan kontrol kecepatan presisi atau pemosisian presisi, atau keduanya.
Seperti yang kita ketahui bahwa banyak motor listrik industri digunakan dengan kontrol umpan balik loop tertutup untuk mencapai pemosisian yang tepat atau kontrol kecepatan yang presisi, di sisi lain, motor stepper dapat beroperasi pada pengontrol loop terbuka. Hal ini pada gilirannya mengurangi total biaya sistem dan menyederhanakan desain alat berat dibandingkan dengan kontrol sistem servo. Mari kita bahas secara singkat tentang motor stepper dan jenisnya . 
- Pos Terkait:Motor Servo – Jenis, Konstruksi, Cara Kerja, &Aplikasi
Apa itu Motor Stepper?
Motor Stepper adalah perangkat elektromekanis tanpa sikat yang mengubah rangkaian pulsa listrik yang diterapkan pada belitan eksitasinya menjadi rotasi poros mekanis langkah demi langkah yang ditentukan dengan tepat. Poros motor berputar melalui sudut tetap untuk setiap pulsa diskrit. Rotasi ini bisa linier atau sudut. Ini mendapat gerakan satu langkah untuk input pulsa tunggal.
Saat rangkaian pulsa diterapkan, ia akan diputar melalui sudut tertentu. Sudut putaran poros motor stepper untuk setiap pulsa disebut sebagai sudut langkah, yang umumnya dinyatakan dalam derajat.
Jumlah pulsa input yang diberikan ke motor menentukan sudut langkah dan karenanya posisi poros motor dikendalikan dengan mengontrol jumlah pulsa. Fitur unik ini membuat motor stepper sangat cocok untuk sistem kontrol loop terbuka di mana posisi poros yang tepat dipertahankan dengan jumlah pulsa yang tepat tanpa menggunakan sensor umpan balik.
Jika sudut langkah lebih kecil, semakin besar jumlah langkah per putaran dan semakin tinggi akurasi posisi yang diperoleh. Sudut langkah bisa sebesar 90 derajat dan sekecil 0,72 derajat, namun, sudut langkah yang umum digunakan adalah 1,8 derajat, 2,5 derajat, 7,5 derajat, dan 15 derajat.
Arah rotasi poros tergantung pada urutan pulsa yang diterapkan ke stator. Kecepatan poros atau kecepatan motor rata-rata berbanding lurus dengan frekuensi (laju pulsa input) pulsa input yang diterapkan pada belitan eksitasi. Oleh karena itu, jika frekuensi rendah, motor stepper berputar secara bertahap dan untuk frekuensi tinggi, terus berputar seperti motor DC karena inersia.
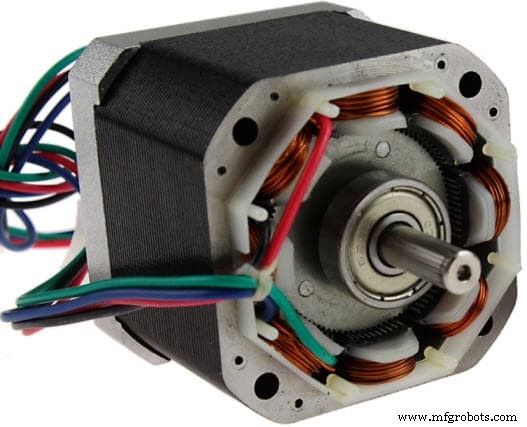
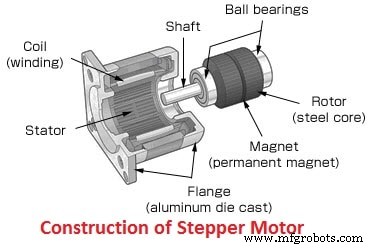
Seperti semua motor listrik, motor ini memiliki stator dan rotor. Rotor adalah bagian bergerak yang tidak memiliki belitan, sikat dan komutator. Biasanya rotor adalah jenis keengganan variabel atau magnet permanen. Stator sering dibuat dengan belitan multikutub dan multifase, biasanya dari belitan tiga atau empat fase yang dililitkan untuk sejumlah kutub yang diperlukan yang ditentukan oleh perpindahan sudut yang diinginkan per pulsa input.
Tidak seperti motor lain, motor ini beroperasi pada pulsa kontrol diskrit terprogram yang diterapkan ke belitan stator melalui penggerak elektronik. Rotasi terjadi karena interaksi magnet antara kutub belitan stator yang diberi energi berurutan dan kutub rotor.
Ada beberapa jenis motor stepper tersedia di pasar saat ini dalam berbagai ukuran, jumlah langkah, konstruksi, kabel, roda gigi, dan karakteristik listrik lainnya. Karena motor ini mampu beroperasi secara diskrit, motor ini sangat cocok untuk berinteraksi dengan perangkat kontrol digital seperti komputer.
Karena kontrol yang tepat dari kecepatan, rotasi, arah, dan posisi sudut, ini sangat menarik dalam sistem kontrol proses industri, mesin CNC, robotika, sistem otomasi manufaktur, dan instrumentasi.
- Pos Terkait:Motor DC Brushless – Konstruksi, Prinsip Kerja &Aplikasi
Jenis Motor Stepper
Ada tiga kategori dasar motor stepper , yaitu
- Motor Stepper Magnet Permanen
- Motor Stepper Reluktansi Variabel
- Motor Stepper Hibrida
Dalam semua motor ini, belitan eksitasi digunakan di stator di mana jumlah belitan mengacu pada jumlah fase.
Tegangan DC diterapkan sebagai eksitasi ke gulungan belitan dan setiap terminal belitan terhubung ke sumber melalui sakelar solid state. Tergantung pada jenis motor stepper, desain rotornya dibuat seperti rotor baja lunak dengan kutub menonjol, rotor magnet permanen silinder dan magnet permanen dengan gigi baja lunak. Mari kita bahas jenis ini secara mendetail.
- Anda juga dapat membaca:Koneksi Motor Tiga Fasa Bintang/Delta (Y-Δ) Mundur / Maju dengan Diagram Daya &Kontrol Timer
Motor Stepper Reluktansi Variabel
Ini adalah tipe dasar motor stepper yang telah ada sejak lama dan memastikan cara termudah untuk memahami prinsip operasi dari sudut pandang struktural. Seperti namanya, posisi sudut rotor tergantung pada keengganan sirkuit magnetik yang terbentuk antara kutub stator (gigi) dan gigi rotor.

Konstruksi Motor Stepper Reluktansi Variabel
Terdiri dari stator luka dan rotor multi-gigi besi lunak. Stator memiliki setumpuk laminasi baja silikon tempat belitan stator dililit. Biasanya dililitkan selama tiga fase yang didistribusikan di antara pasangan kutub.
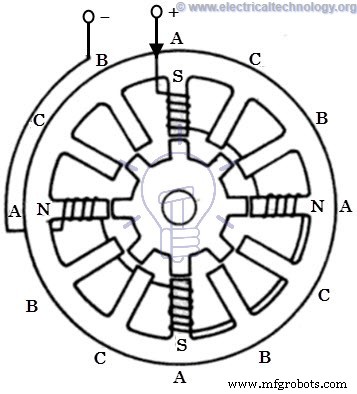
Jumlah kutub pada stator yang terbentuk sama dengan kelipatan genap dari jumlah fase di mana belitan dilukai pada stator. Pada gambar di bawah, stator memiliki 12 kutub proyeksi yang berjarak sama di mana setiap kutub dililitkan dengan kumparan yang menarik. Ketiga fase ini diberi energi dari sumber DC dengan bantuan sakelar solid state.
Rotor tidak membawa belitan dan jenis tiang menonjol seluruhnya terbuat dari laminasi baja berlubang. Gigi proyeksi kutub rotor memiliki lebar yang sama dengan gigi stator. Jumlah kutub pada stator berbeda dengan kutub rotor, yang memberikan kemampuan untuk memulai sendiri dan rotasi dua arah motor.
Hubungan kutub rotor dalam hal kutub stator untuk motor stepper tiga fasa diberikan sebagai, Nr =Ns ± (Ns / q). Di sini Ns =12, dan q=3, dan karenanya Nr =12 ± (12 / 3) =16 atau 8. Rotor konstruksi 8 kutub tanpa eksitasi diilustrasikan di bawah ini.
Bekerja Motor Stepper Reluktansi Variabel
Motor stepper bekerja berdasarkan prinsip bahwa rotor sejajar dalam posisi tertentu dengan gigi kutub eksitasi dalam sirkuit magnetik di mana jalur reluktansi minimum ada. Setiap kali daya diterapkan ke motor dan dengan menarik belitan tertentu, ia menghasilkan medan magnetnya dan mengembangkan kutub magnetnya sendiri.
Karena magnet sisa di kutub magnet rotor, itu akan menyebabkan rotor bergerak dalam posisi sedemikian rupa sehingga mencapai posisi keengganan minimum dan karenanya satu set kutub rotor sejajar dengan rangkaian kutub stator yang diberi energi. Pada posisi ini, sumbu medan magnet stator sesuai dengan sumbu yang melewati dua kutub magnet rotor.
Saat rotor sejajar dengan kutub stator, ia memiliki gaya magnet yang cukup untuk menahan poros agar tidak bergerak ke posisi berikutnya, baik searah jarum jam maupun berlawanan arah jarum jam.
Perhatikan diagram skematik dari 3-fase, 6 kutub stator dan 4 gigi rotor ditunjukkan pada gambar di bawah. Ketika fasa A-A’ disupply DC dengan menutup saklar -1, lilitan menjadi magnet yang mengakibatkan satu gigi menjadi Utara dan lainnya Selatan. Jadi sumbu magnet stator terletak di sepanjang kutub ini.
Karena gaya tarik-menarik, kumparan stator Kutub Utara menarik gigi rotor terdekat dari polaritas yang berlawanan, yaitu, Kutub Selatan dan Kutub Selatan menarik gigi rotor terdekat dengan polaritas yang berlawanan, yaitu, Utara. Rotor kemudian menyesuaikan ke posisi reluktansi minimumnya di mana sumbu magnet rotor sama persis dengan sumbu magnet stator.
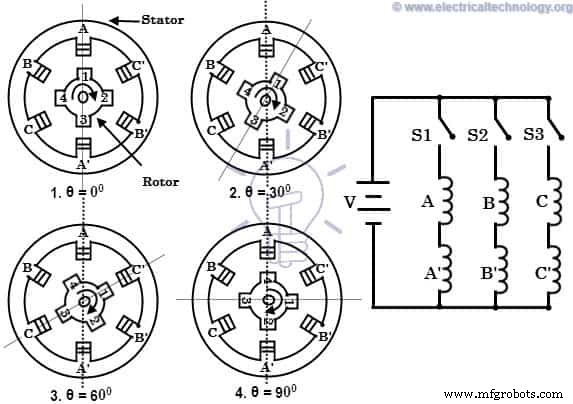
Ketika fase B-B' diberi energi oleh sakelar penutup -2 menjaga fase A-A' tetap tidak aktif dengan membuka sakelar-1, belitan B-B' akan menghasilkan fluks magnet dan karenanya sumbu magnet stator bergeser di sepanjang kutub yang dibentuk olehnya. Oleh karena itu, rotor bergeser ke keengganan paling kecil dengan gigi stator bermagnet dan berputar melalui sudut 30 derajat searah jarum jam.
Ketika sakelar-3 diberi energi setelah sakelar-2 dibuka, fase C-C' diberi energi, gigi rotor sejajar dengan posisi baru dengan bergerak melalui sudut tambahan 30 derajat. Dengan cara ini, rotor bergerak searah jarum jam atau berlawanan arah jarum jam dengan menarik belitan stator secara berurutan dalam urutan tertentu. Sudut langkah motor stepper gigi rotor 4 kutub 3-fase ini dinyatakan sebagai, 360/ (4 × 3) =30 derajat (sebagai sudut langkah =360 / Nr × q).
Sudut langkah dapat dikurangi lebih lanjut dengan menambah jumlah kutub pada stator dan rotor, dalam kasus seperti itu motor sering dililit dengan belitan fase tambahan. Ini juga dapat dicapai dengan mengadopsi konstruksi motor stepper yang berbeda seperti pengaturan multistack dan mekanisme roda gigi reduksi.
- Anda juga dapat membaca:Koneksi Motor Tiga Fasa STAR/DELTA Tanpa Diagram Daya &Kontrol Timer
Motor Stepper Magnet Permanen
Motor desain magnet permanen mungkin yang paling umum di antara beberapa jenis motor stepper. Sesuai dengan namanya, ia menambahkan magnet permanen pada konstruksi motor. Jenis motor stepper ini juga disebut sebagai motor can-stack atau motor kaleng . Keuntungan utama dari motor ini adalah biaya produksi yang rendah. Jenis motor ini memiliki 48-24 langkah per putaran.

Motor Stepper Magnet Permanen Konstruksi
Pada motor ini, statornya multipolar dan konstruksinya mirip dengan motor stepper reluktansi variabel seperti yang dibahas di atas. Ini terdiri dari pinggiran berlubang di mana kumparan stator dililit. Ini telah memproyeksikan kutub pada struktur slotted di mana gulungan luka bisa dua atau tiga atau empat fase.
Terminal akhir dari semua belitan ini dibeli dan dihubungkan ke eksitasi DC melalui sakelar solid state di sirkuit drive.
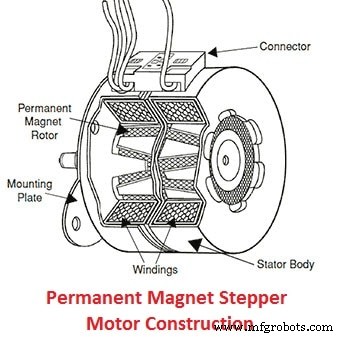
Rotor terbuat dari bahan magnet permanen seperti ferit yang dapat berbentuk silinder atau tiang menonjol, tetapi biasanya berbentuk silinder halus. Rotor dirancang untuk memiliki jumlah kutub magnet permanen yang genap dengan polaritas Utara dan Selatan yang bergantian.
Kerja Motor Stepper Magnet Permanen
Pengoperasian motor ini bekerja berdasarkan prinsip bahwa kutub yang tidak sejenis saling tarik menarik dan kutub yang sejenis saling tolak menolak. Ketika belitan stator dieksitasi dengan suplai DC, ia menghasilkan fluks magnet dan membentuk kutub Utara dan Selatan. Karena gaya tarik-menarik dan tolak menolak antara kutub magnet permanen rotor dan kutub stator, rotor mulai bergerak naik ke posisi di mana pulsa diberikan ke stator.
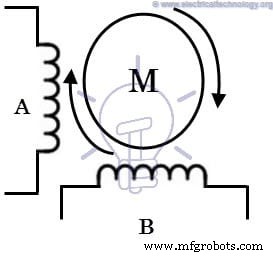
Pertimbangkan motor stepper 2 fase dengan dua kutub rotor magnet permanen seperti yang ditunjukkan pada gambar di bawah.
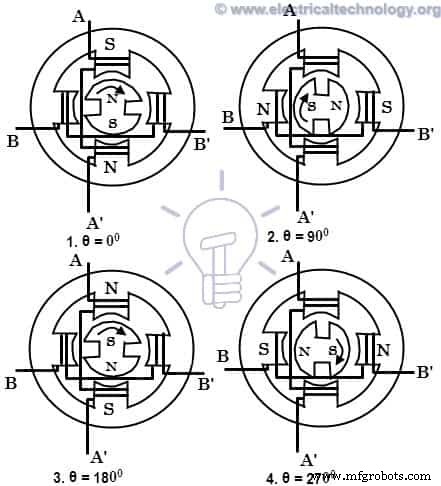
Bila fase A diberi energi dengan positif dengan terhadap A', belitan membentuk kutub Utara dan Selatan. Karena gaya tarik-menarik, kutub rotor sejajar dengan kutub stator sedemikian rupa sehingga sumbu kutub magnet rotor menyesuaikan dengan stator seperti yang ditunjukkan pada gambar.
Ketika eksitasi dialihkan ke fase B dan mematikan fase A, rotor selanjutnya menyesuaikan dengan sumbu magnet fase B, dan dengan demikian berputar 90 derajat searah jarum jam.
Selanjutnya, jika fase A diberi energi dengan arus negatif terhadap A', pembentukan kutub stator menyebabkan rotor bergerak 90 derajat lagi searah jarum jam.
Dengan cara yang sama, jika fase B dieksitasi dengan arus negatif dengan menutup sakelar fase A, rotor berputar 90 derajat ke arah yang sama. Selanjutnya, jika fase A dieksitasi dengan arus positif, rotor datang ke posisi semula sehingga membuat putaran penuh 360 derajat. Ini menyiratkan bahwa, setiap kali stator tereksitasi, rotor cenderung berputar 90 derajat searah jarum jam.
Sudut langkah motor rotor magnet permanen 2-fase 2 kutub ini dinyatakan sebagai, 360/ (2 × 2) =90 derajat. Ukuran langkah dapat dikurangi dengan memberi energi dua fase secara bersamaan atau urutan mode 1 fase ON dan 2 fase ON dengan polaritas yang tepat.
- Anda juga dapat membaca:Istilah dan Definisi terkait Kontrol dan Perlindungan Motor
Hybrid Stepper Motor
It is the most popular type of stepper motor as it provides better performance than permanent magnet rotor in terms of step resolution, holding torque and speed. However, these motors are more expensive than PM stepper motors. It combines the best features of both variable reluctance and permanent magnet stepper motors. These motors are used in applications that require very small stepping angle such as 1.5, 1.8 and 2.5 degrees.

Construction of Hybrid Stepper Motor
The stator of this motor is same as its permanent magnet or reluctance type counterpart. The stator coils are wound on alternate poles. In this, the coils of different phases are wound on each pole, usually two coils at a pole which is referred as a bifilar connection.
The rotor consists of a permanent magnet which is magnetized in axial direction to create a pair of magnetic poles (N and S poles). Each pole is covered with uniformly spaced teeth. The teeth are made up of soft steel and two section, of which on each pole are misaligned each other by a half-tooth pitch.
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
This motor works similar to that of permanent magnet stepper motor. The figure above shows 2-phase, 4-pole, 6-tooth rotor hybrid stepper motor. When the phase A-A’ is excited with a DC supply, keeping B-B’ unexcited, the rotor aligns such that the south pole of the rotor faces north pole of the stator while north pole of rotor faces south pole of the stator.
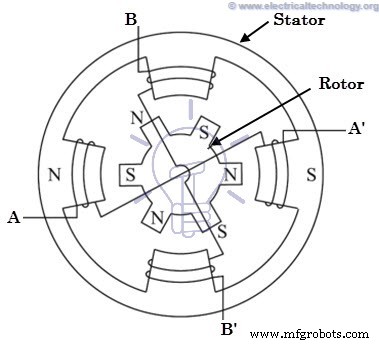
Now, if the phase B-B’ is excited, keeping A-A’ switched off in such a way that upper pole becomes north and lower becomes south, then the rotor will align to a new position by moving through counterclockwise direction. If the phase B-B’ is oppositely excited such that the upper pole becomes south and lower becomes north, then the rotor will turn clockwise direction.
By a proper sequence of pulses to the stator, the motor will turn in desired direction. For every excitation, rotor will get locked into new position, and even if excitation is removed motor still maintains its locked condition due to the permanent magnet excitation. The step angle of this 2-phase, 4-pole, 6-tooth rotor motor is given as 360/ (2 × 6) =30 degrees. In practice, hybrid motors are constructed with more number of rotor poles in order to get high angular resolution.
- Related Post:What is Motor Efficiency &How to improve it?
Unipolar and Bipolar Stepper Motors
The above discussed motors can be unipolar or bipolar based on the coil winding arrangements. A unipolar motor is employed with two windings per phase and hence the direction of current flow through these windings changes the rotation of the motor. In this configuration, the current flow is through one direction in one coil and opposite direction in another coil.
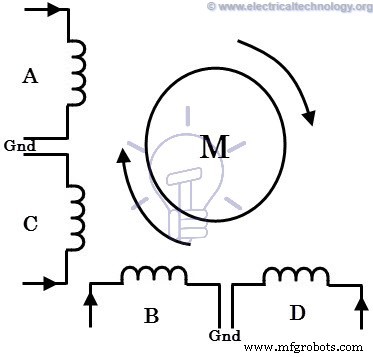
The figure below shows 2-phase unipolar stepper motor wherein A and C coils are for one phase and B and D are for other phase. In each phase each coil carries current in opposite direction to that of other coil. Only one coil will be carrying current at a time in each phase for achieving particular direction of rotation. So just by switching the terminals to each coil, the direction of rotation is controlled.
In case of a bipolar stepper motor, each phase consists of a single winding rather than two in case of unipolar one. In this, the direction of rotation is controlled by reversing the current through the windings. Hence, it requires a complex drive circuit for current reversal.
- You may also read:What is a Solenoid and Solenoid Magnetic Field
Stepping Modes of a Stepper Motor
A typical stepping action causes the motor to step through a sequence of equilibrium positions in response to current pulses given to it. It is possible to vary the stepping action in different ways simply by changing the sequence through which stator windings are energized. The following are the most common operating or driving modes of stepper motors.
- Wave step
- Full step
- Half step
- Microstepping
Wave Step Mode
Wave step mode is the simplest of all other modes in which only one winding is energized at any given time. Each coil of the phase is connected to the supply alternatively. The table below shows the order through which coils are energized in a 4-phase stepper motor.
In this mode motor gives maximum step angle compared to all other modes. It is the simplest and most commonly used mode for stepping; however the torque produced is less as it uses some part of the total winding at a given time. 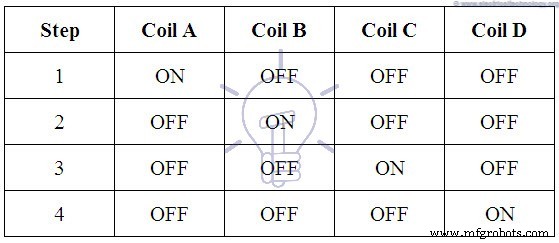
Full Step Mode
In this drive or mode, two stator phases are energized simultaneously at any given time. When two phases are energized together, the rotor will experience the torque from both phases and comes to the equilibrium position, which will be interleaved between two adjacent wave step positions or 1-phase excitations. So this step provides better holding torque than wave step. The table below shows the full step drive for 4-phase stepper motor. 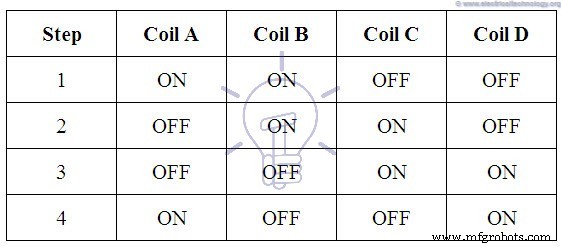
Half Step Mode
It is the combination of both wave and full step modes. In this, single phase and dual phase excitations are carried out alternatively, i.e., one-phase ON, two-phases ON, and so on. The step angle in this mode becomes half of the full step angle. This drive mode has highest torque and stability compared to all other modes. The table containing phase pulsing sequence for a 4-phase motor in half stepping is given below. 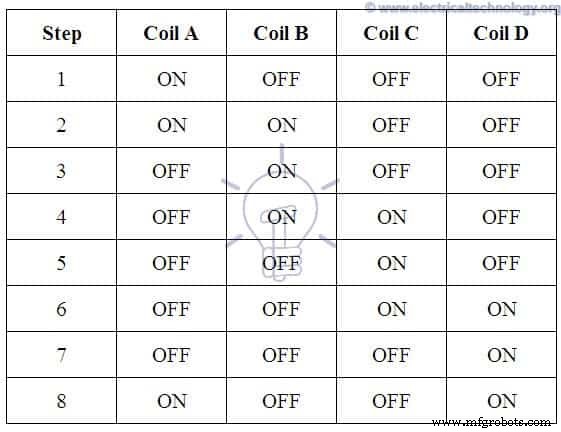
Microstepping Mode
In this mode, each motor step is subdivided into several small steps, even hundreds of fixed positions, therefore a greater positioning resolution is obtained. In this, currents through the windings are continually varied in order to get very small steps. In this, two phases are excited simultaneously, but with the unequal currents in each phase.
For example, the current through phase -1 is held constant while the current through phase-2 is incremented in steps till the maximum value of current, whether it is negative or positive. The current in the phase-1 is then decreased or increased in steps till zero. Thus, the motor will produce a small step size.
All these stepping modes can be obtained by each type of stepper motor discussed above. However, the direction of current in each winding during these steps can be varied depending on the type of motor and either it is unipolar or bipolar.
- Related Post Cable Size Calculation for LT &HT Motors
Advantages of Stepper Motor
- At standstill position, the motor has full torque. No matter if there is no moment or changing position.
- It has a good response to starting, stopping and reversing position.
- As there is no contact brushes in the stepper motor, It is reliable and the life expectancy depends on the bearings of the motor.
- The motor rotation angle is directly proportional to the input signals.
- It is simple and less costly to control as motor provides open loop control when responding to the digital input signals.
- The motor speed is directly proportional to the input pulses frequency, this way a wide range of rotational speed can be achieved.
- When load is coupled to the shaft, it is still possible to realize the synchronous rotation with low speed.
- The exact positioning and repeatability of movement is good as it has a 3-5% accuracy of a step where the error is non cumulative from one step to another.
- Stepper motors are safer and low cost (as compared to servo motors), having high torque at low speeds, high reliability with simple construction which operates at any environment.
Disadvantages of Stepper Motors
- Stepper motors having low Efficiency.
- It has low Accuracy.
- Its torque declines very quickly with speed.
- As stepper motor operates in open loop control, there is no feedback to indicate potential missed steps.
- It has low torque to inertia ratio means it can’t accelerate the load very quickly.
- They are noisy.
Applications of Stepper Motors
- Stepper motors are used in automated production equipments and automotive gauges and industrial machines like packaging, labeling, filling and cutting etc.
- It is widely used in security devices such as security &surveillance cameras.
- In medical industry, stepper motors are widely used in samples, digital dental photography, respirators, fluid pumps, blood analysis machinery and medical scanners etc.
- They are used in consumer electronics in image scanners, photo copier and printing machines and in digital camera for automatic zoom and focus functions and positions.
- Stepper motors also used in elevators, conveyor belts and lane diverters.
Anda juga dapat membaca:
- DC Drives – Construction, Working &Classification of Electrical DC Drives
- Three Phase Motor Power &Control Wiring Diagrams
- Electric Motors Library (AC &DC )


