Tutorial Motor Servo Untuk Pemula – Electronicslovers.com
Motor servo juga banyak digunakan di ROBOTICS seperti di INDUSTRI, servo adalah jantung dari proyek ROBOTICS saat ini seperti lengan robot, mobil RC, antena parabola, ban berjalan, penentuan posisi antena, fokus otomatis kamera, proses pencetakan, dll.
Dalam banyak proyek hobi, motor servo banyak digunakan. Semoga artikel ini dapat memberi Anda informasi singkat tentang apa sebenarnya servo itu, prinsip kerja dasar motor servo, berbagai macam servo, perbandingan dasar antara motor servo dan motor DC biasa.

Definisi Motor Servo:
“ Ini adalah perangkat yang memberikan gerakan sebagai respons terhadap perintah saat mengatur gerakan sebagai respons terhadap umpan balik negatif. “
Fitur utama servo adalah mengontrol posisi porosnya dengan tepat. Ini pada dasarnya adalah sistem loop tertutup (yaitu, umpan balik negatif).
Ada empat bagian utama dalam sistem loop tertutup servo:
- Motor DC.
- Sirkuit kontrol.
- Perkakas.
- Sensor umpan balik posisi.
Bagian utama dari motor servo adalah motor DC kecil. Motor dc ini memiliki kecepatan tinggi (yaitu, RPM tinggi) dan torsi yang sangat rendah (yaitu, gaya puntir yang bertanggung jawab untuk melakukan pekerjaan) . Pada dasarnya, motor dc kecil memiliki kecepatan yang sangat tinggi tetapi tidak memiliki torsi yang jauh lebih tinggi (yaitu, gaya yang kecil dan jarak yang lebih jauh). Tetapi desain roda gigi di dalam servo mengubah kecepatan tinggi dan torsi rendah ini dari motor dc menjadi kecepatan yang lebih lambat dan torsi yang lebih tinggi (yaitu, jarak yang kecil, gaya yang lebih besar).
Banyak motor dc lebih cepat di sekitar 5000 RPM, tetapi roda gigi mengurangi RPM yang sangat tinggi ini menjadi sekitar 60 RPM dan torsi tinggi. Servo yang murah memiliki roda gigi yang terbuat dari plastik untuk menjaga bobotnya lebih ringan dan biaya rendah, sedangkan servo yang dirancang untuk pekerjaan yang lebih berat (yaitu, torsi yang sangat tinggi) memiliki roda gigi yang terbuat dari logam untuk misalnya servo yang digunakan dalam industri .
Ketika daya pertama kali diterapkan ke servo melalui saluran input, motor dc berputar ke RPM yang sangat tinggi dan torsi yang sangat kecil tetapi karena roda gigi, poros servo melambat.
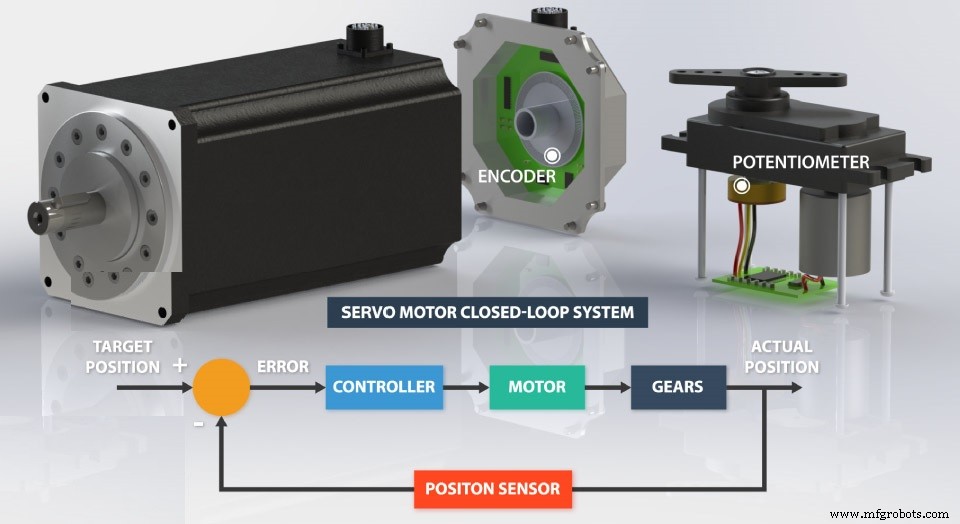 Karena sensor umpan balik posisi terhubung dalam pengaturan umpan balik negatif untuk mengontrol posisi servo secara tepat untuk posisi yang diinginkan. Dalam servo industri, sensor umpan balik posisi adalah encoder presisi tinggi tetapi dalam hobi, sensor posisi servo adalah potensiometer. Sensor posisi (yaitu, potensiometer) pada gigi akhir terhubung ke sirkuit yang berisi detektor kesalahan (yaitu, detektor kesalahan ini pada dasarnya adalah komparator yang membandingkan dua sinyal satu dari jalur input juga disebut posisi target dan lainnya dari output melalui potensiometer juga disebut posisi aktual) dan IC pengontrol yang tertanam di papan.
Karena sensor umpan balik posisi terhubung dalam pengaturan umpan balik negatif untuk mengontrol posisi servo secara tepat untuk posisi yang diinginkan. Dalam servo industri, sensor umpan balik posisi adalah encoder presisi tinggi tetapi dalam hobi, sensor posisi servo adalah potensiometer. Sensor posisi (yaitu, potensiometer) pada gigi akhir terhubung ke sirkuit yang berisi detektor kesalahan (yaitu, detektor kesalahan ini pada dasarnya adalah komparator yang membandingkan dua sinyal satu dari jalur input juga disebut posisi target dan lainnya dari output melalui potensiometer juga disebut posisi aktual) dan IC pengontrol yang tertanam di papan.
Karena putaran roda gigi, kenop potensiometer berputar, akibatnya dihasilkan tegangan yang terhubung ke detektor kesalahan. Sekarang kesalahan dihasilkan karena perbandingan dua sinyal oleh komparator, yang terhubung ke IC pengontrol (yaitu, pengontrol ini adalah H-Bridge yang terintegrasi pada sebuah chip). Setelah perbandingan, kesalahan dihasilkan yang memungkinkan pengontrol yang memutuskan rotasi poros di kedua arah untuk mencapai posisi target. 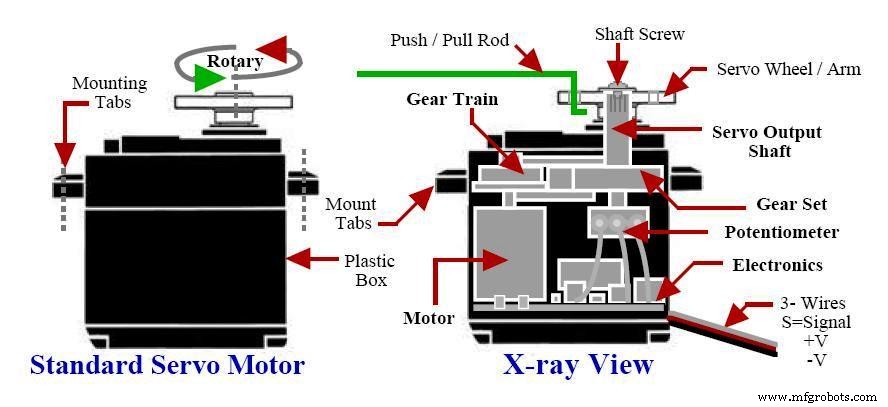
Jenis SERVO:
Servo tersedia dalam berbagai variasi.
- SERVO ROTASI POSISI:
Poros keluaran hanya akan berputar 180 derajat. Pemberhentian tambahan ditempatkan untuk membatasi putaran poros lebih lanjut di luar jangkauannya (misalnya:lengan ROBOTIK, kemudi, dll.)
- SERVO ROTASI KONTINU:
Ini mirip dengan servo rotasi posisional, tetapi dapat berputar 360 derajat terus menerus. Perintah yang dikirim ke servo akan menyebabkannya berputar searah jarum jam atau berlawanan arah jarum jam dengan kecepatan yang bervariasi (misalnya:antena RADAR, dll).
- SERVO LINEAR:
Gerakan servo ini adalah arah maju mundur bukan dalam arah melingkar (misalnya:mesin CNC, printer 3D, dll).
PERBANDINGAN DASAR ANTARA MOTOR SERVO DAN DC:
Motor servo dapat berputar 180 derajat bolak-balik tetapi motor dc dapat berputar 360 derajat selama diberi daya. Servo saat ini juga tersedia dalam putaran kontinu yang dapat berputar 360 derajat tetapi karena desain roda gigi kecepatan servo lebih rendah dibandingkan dengan motor dc. Motor DC adalah pilihan terbaik untuk robot yang berjalan bebas sedangkan ketika kita membutuhkan presisi (misalnya:ROBOTIC ARM, wiper boat rudders, dll) servo adalah pilihan terbaik.
Kecepatan motor dc dikendalikan dengan teknik PWM (pulse width modulation) (yaitu dengan memvariasikan duty cycle kita dapat mengontrol kecepatan motor dc). Misalnya:duty cycle lebih besar dari 50% berarti kecepatan lebih cepat, duty cycle kurang dari 50% berarti kecepatan lebih lambat.
Sedangkan teknik PWM pada motor servo lebih menentukan posisi porosnya daripada kecepatannya. Setelah perintah dikirim ke servo, maka akan secara tepat mengatur posisi poros ke posisi yang diinginkan. Dengan demikian, perilaku poros yang dapat disesuaikan secara otomatis ini menjadikan servo sebagai pilihan sempurna untuk aplikasi ROBOTICS.


