Tentang proyek ini
Halo dan selamat datang di proyek pertama saya!
Anjing kami MENCINTAI makanannya, dia akan benar-benar memakan semuanya dalam hitungan detik. Saya telah menemukan cara untuk memperlambat ini, dari bola dengan makanan di dalamnya hingga melemparkannya ke seluruh halaman belakang. Hebatnya, dia sekarang seperti ruang hampa dan dapat menemukan dan memakan makanan dengan sangat cepat. Jadi, kembali ke papan gambar dan saya datang dengan perangkat ini untuk membantunya memperlambat dan menikmati makanannya :)
KONSEP 
Harap luangkan beberapa detik untuk menikmati 2 video, mereka menjelaskan banyak hal.
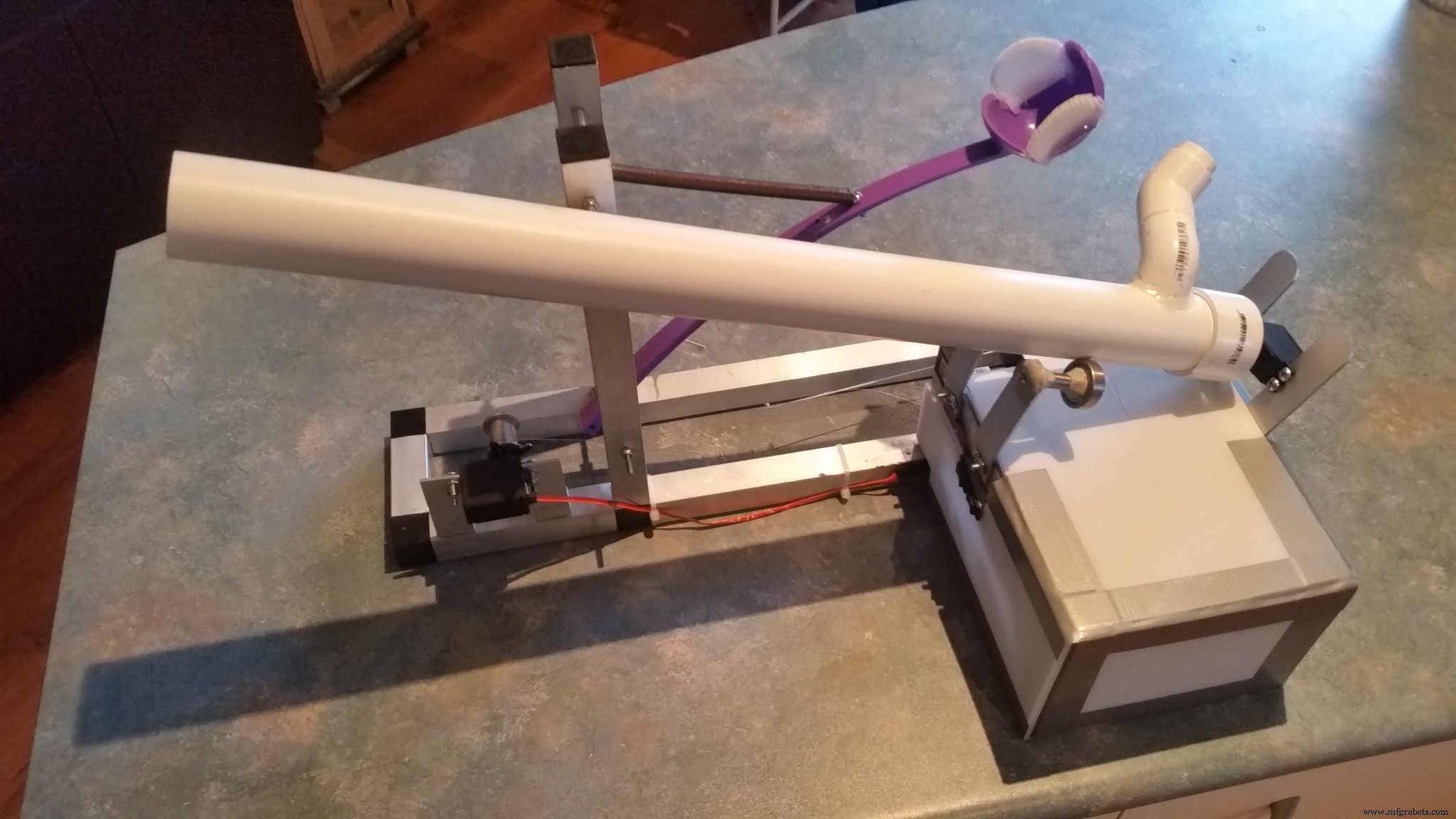
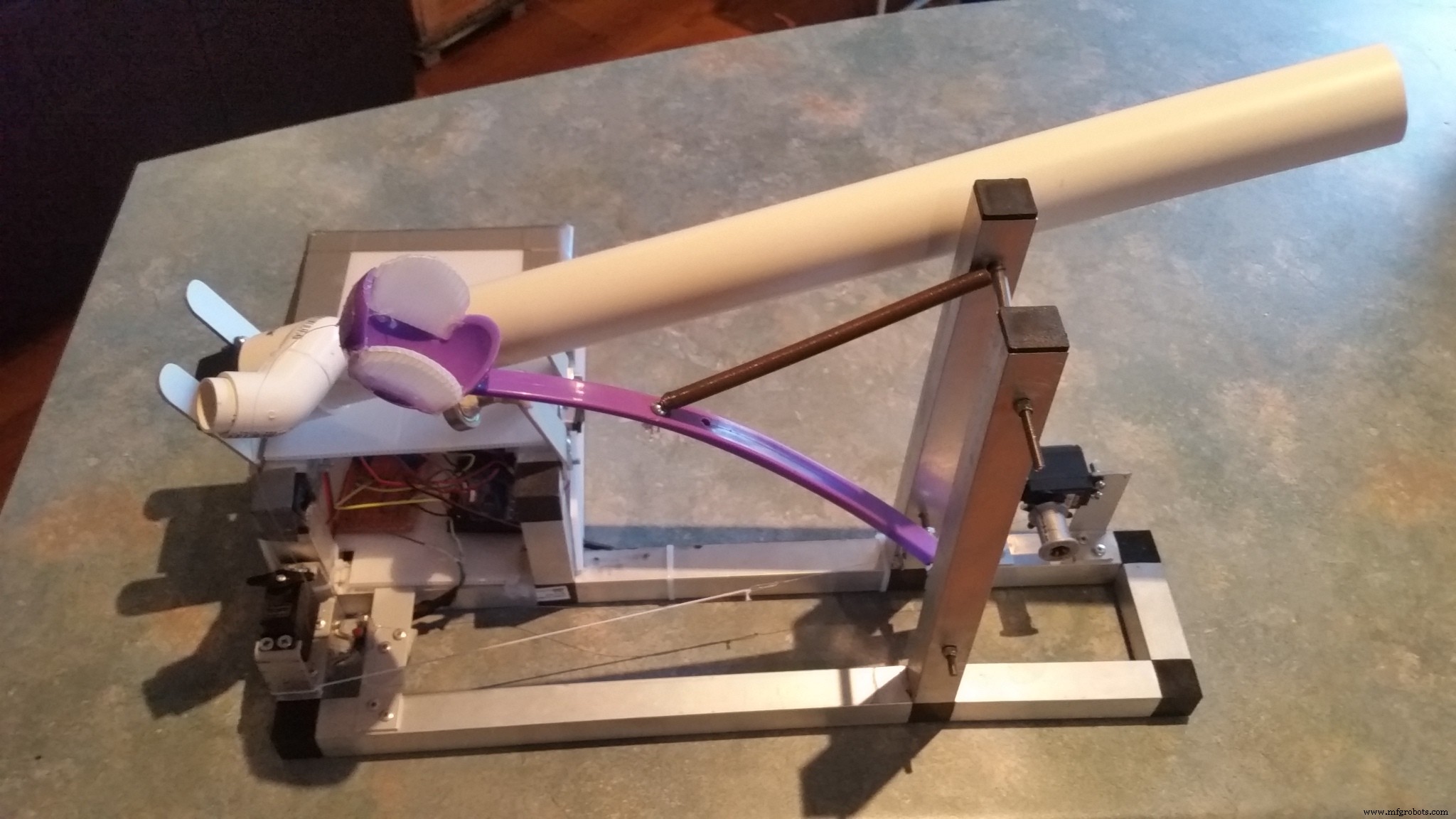
Tetapi, dengan kata lain, konsep dasarnya adalah bahwa servo Rotator berputar dan menarik lengan ketapel ke bawah. Ia melakukan ini sampai menyentuh sakelar batas. Kemudian servo Pemicu pergi ke posisi tahan, yang menahan lengan ketapel. Servo Rotator kemudian mundur ke posisi semula, siap untuk lemparan berikutnya.
Servo Pengiriman Makanan memutar pipa dan mengirimkan beberapa makanan (atau hal lain) ke wadah/kepala lengan ketapel. Servo Pemicu kemudian berputar dan membiarkan pegas menarik kembali lengan ketapel dan melemparkan makanan.
Dalam pengujian, biskuit makanan anjing ini dipasang dan dilempar lebih dari 10 meter, dengan food rolling. Penyesuaian pada servo dan mengubah pegas akan mengubah ini sepenuhnya.
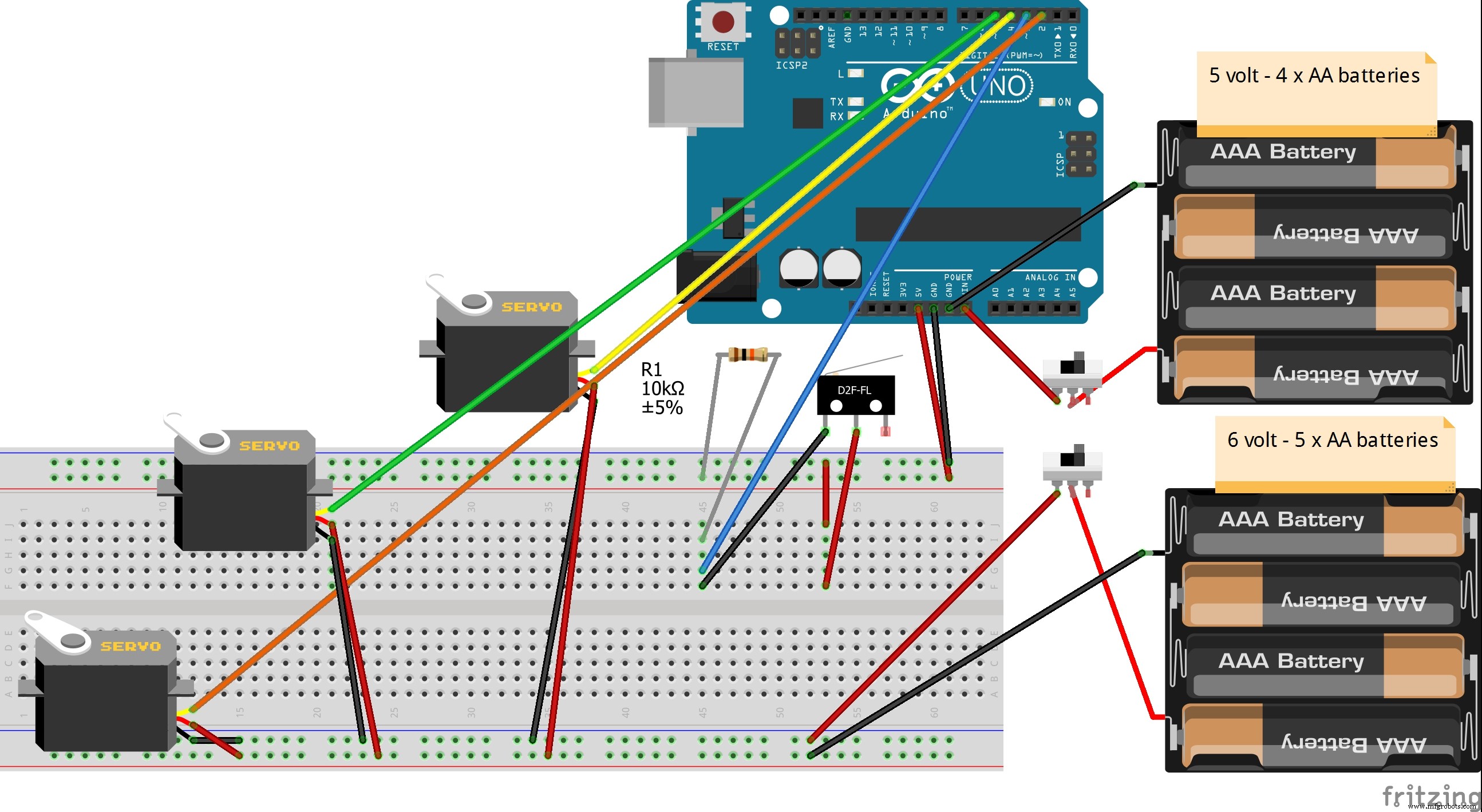
ELEKTRONIK 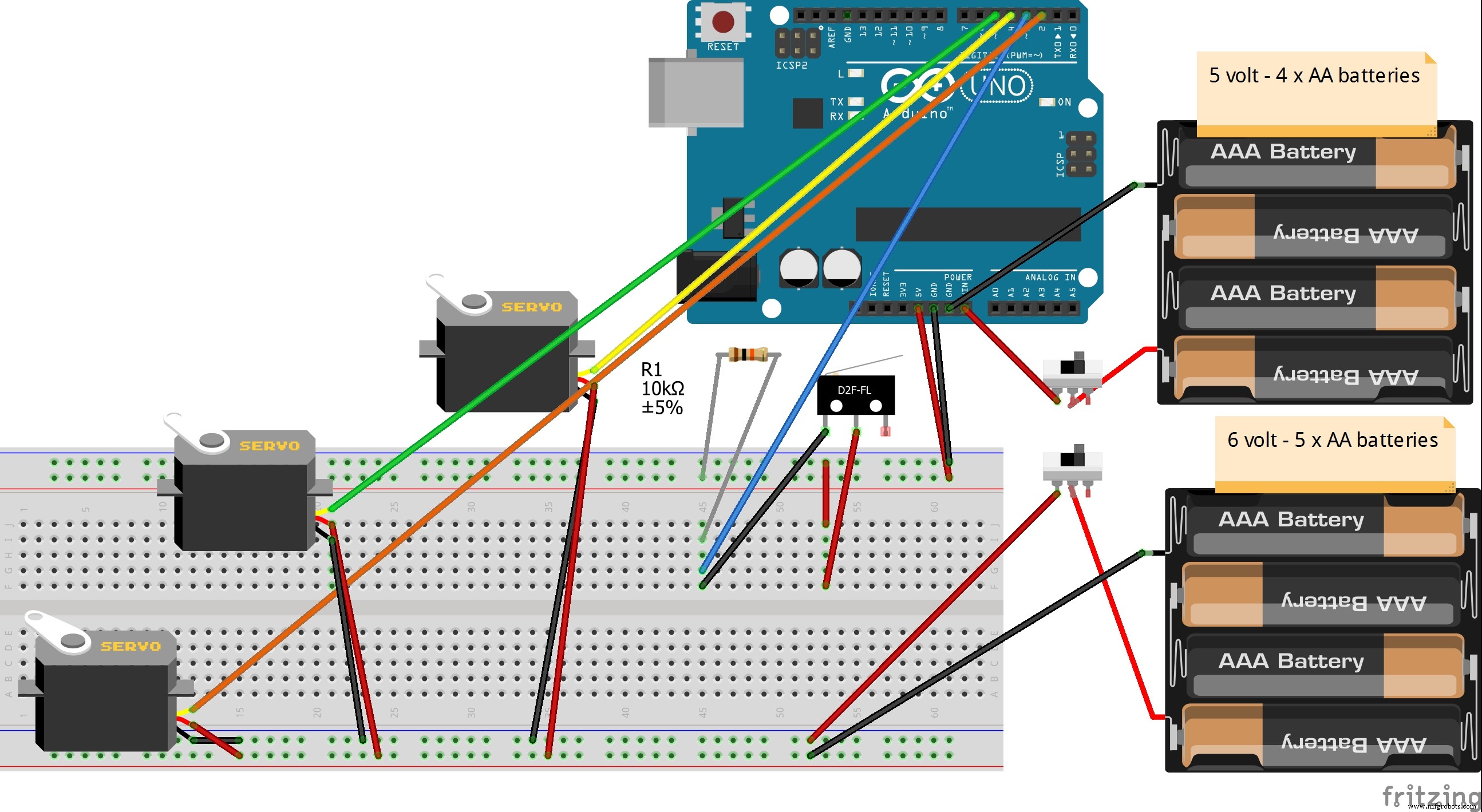
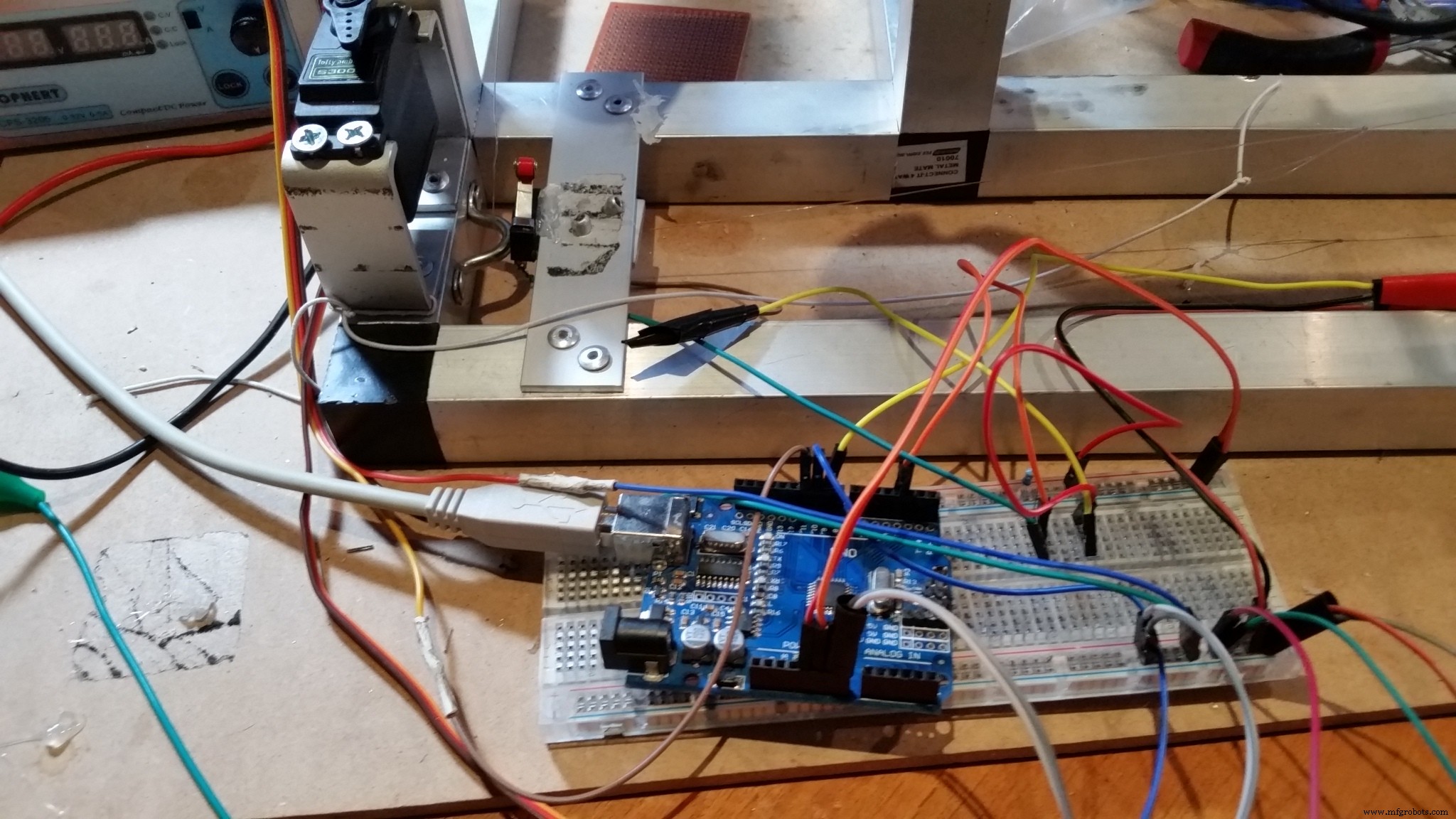
Saya akan mencoba untuk ringkas sepanjang proyek ini, bukan hanya untuk kesederhanaan, tetapi karena ketapel ini dapat dibuat dengan 100 cara berbeda. Itu dapat diskalakan dan Anda dapat membuat berbagai struktur dan menggunakan berbagai bahan. Selain elektronik dan servo, sisanya sepenuhnya fleksibel dengan apa yang Anda miliki, atau sesuai anggaran Anda.
Saya tidak akan menjelaskan langkah demi langkah bagaimana melakukan elektronik, ada banyak proyek yang mengesankan tentang itu. Terutama karena saya seorang pemula, saya mungkin membuat kesalahan dan Anda akan lebih baik belajar dari para profesional;)
BAHAN
- Arduino Uno R3 - Arduino apa pun akan melakukannya
- 1 x servo rotasi terus menerus
- 4 x baterai AA dan casing
- Baterai lentera 1 x 6 volt - dapat (dan saya akan) diganti dengan baterai 5 x AA yang disambungkan menjadi satu
- 2 x sakelar - apa pun bisa digunakan, bahkan yang paling sederhana
- Menghubungkan kabel - banyak dari ini;)
- Breadboard - untuk pengujian
BAHAN - JIKA MEMBUAT PERMANEN
Konektor 2 x 2 pin papan perf - opsional, Anda dapat memasang kabel keras pada penutup baterai.
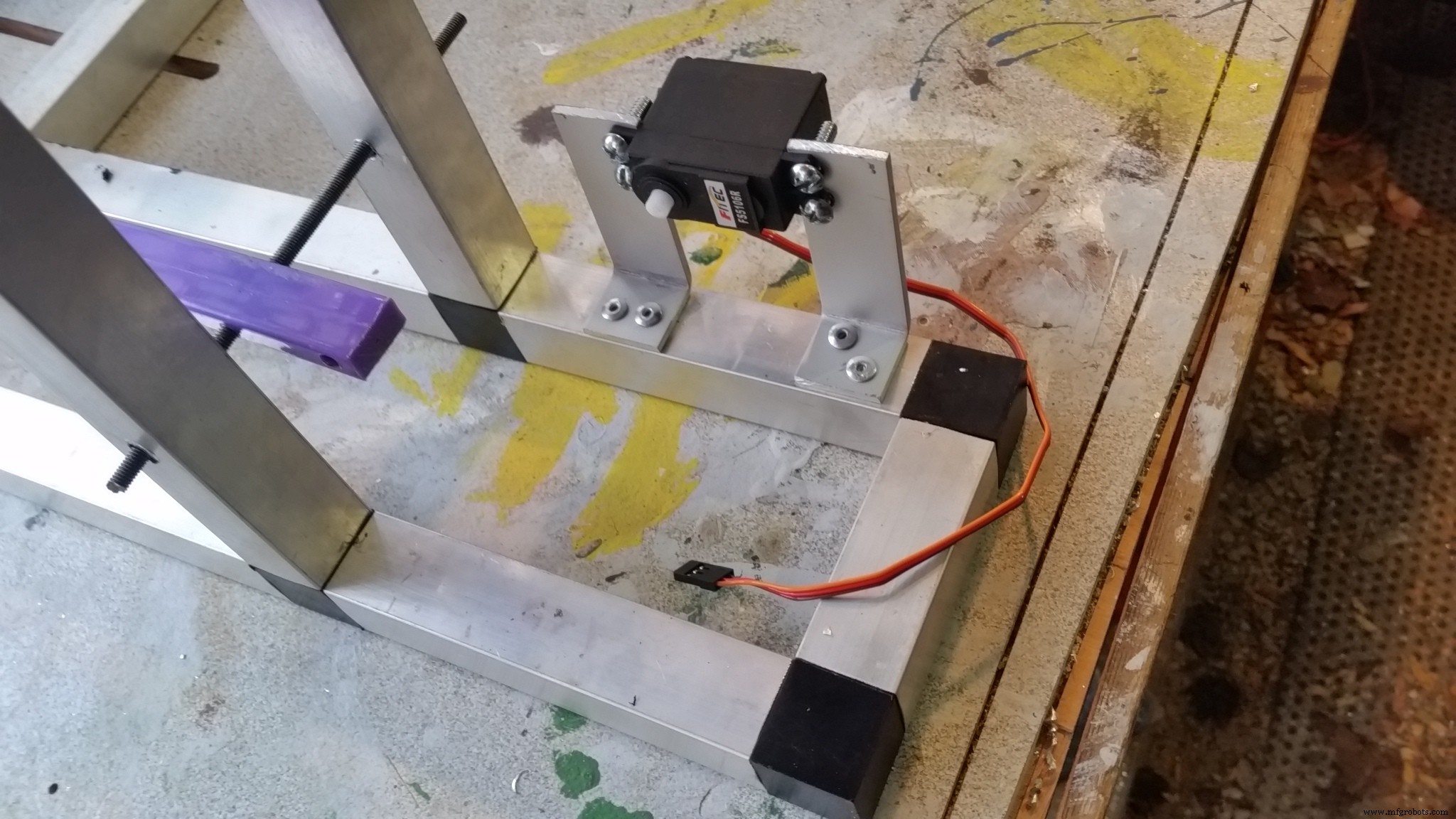
SERVOS
Saya membeli beberapa servo murah Lofty Ambition S3003 180 derajat dari eBay. Anda akan menginginkan sesuatu yang paling tidak kasar ini, jangan mencoba untuk membeli lebih rendah, karena mereka tidak akan mampu menanggung bebannya. Tapi mereka tidak perlu yang mahal dari Jaycar (toko elektronik Australia) atau sejenisnya. Servo rotasi kontinu yang saya gunakan adalah FS5106R. Model tidak penting, tetapi Anda pasti membutuhkan servo untuk memiliki setidaknya spesifikasi ini.
Jika Anda membuat ketapel lebih kuat atau lebih besar, pastikan Anda mendapatkan servo yang lebih besar untuk dicocokkan.
STRUKTUR



Seperti yang dinyatakan sebelumnya, strukturnya sepenuhnya terserah Anda. Anda bisa membuatnya dari plastik, kayu atau logam. Ukurannya juga terserah Anda. Jika Anda ingin dapat melontarkan lebih banyak makanan (atau benda lain), buatlah menjadi lebih kecil atau lebih besar. Jadi, karena poin-poin ini, saya tidak akan membahas detail lengkap tentang bagaimana saya membuat struktur saya. Saya sangat senang memberikan jawaban apa pun.
Saya penggemar berat penggunaan kembali/daur ulang/upcycle/dll. Begitu banyak dari apa yang saya gunakan, saya punya di gudang saya. Saya telah membuat sebagian besar struktur saya dari aluminium yang saya miliki karena proyek lain. Struktur utamanya terbuat dari tabung aluminium persegi 25mm dan konektor plastik "sambungkan". Braket untuk motor yang saya buat dari aluminium dengan lebar 25mm x 3mm.
Konsep pengiriman makanan berasal dari proyek ini:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 oleh https://www.hackster.io/circuito-io-team - terima kasih banyak untuk mereka!
Dudukan yang saya buat terbuat dari pipa PVC 40mm dari toko perangkat keras lokal saya. Lengan sebenarnya adalah dua konektor 45 derajat yang lebih kecil, dihubungkan bersama dan direkatkan ke dalam pipa yang lebih besar. Tabung PVC yang lebih besar memiliki konektor 45 derajat lain untuk memudahkan menambahkan biskuit makanan hewan peliharaan (atau hal lainnya). Semua dibuat agar bisa dibongkar, untuk modifikasi apa pun.
Sisanya untuk lengan pengiriman makanan dirancang untuk memungkinkan gerakan melingkar yang mudah - untuk memudahkan servo. Ada cara yang lebih baik (jika Anda memiliki alat) untuk membuatnya, tetapi saya melakukan yang terbaik. Saya membuat beberapa braket, memotong beberapa batang logam dan menggunakan produk yang disebut "menguleni" untuk menempelkan batang ke braket dan bantalan. Seperti yang Anda lihat di video, pipa PVC berputar dengan mulus di atas bantalan dan ini mengambil banyak beban (dan torsi yang dibutuhkan) dari servo.
Lengan ketapel adalah pelempar bola tenis dari toko murah $2.
Kekuatan melontarkannya berasal dari mata air tua yang saya temukan di bengkel saya - seperti yang Anda lihat dari karatnya. Ukuran dan jenis dan kekuatan pegas sangat penting untuk seberapa kuat dan efektif fungsi ketapel. Anda harus menyeimbangkan kekuatan servo, kekuatan pegas, fleksibilitas lengan ketapel. Mendapatkan keseimbangan ini rumit dan sangat tergantung pada apa yang Anda cari. Saya telah memilih desain yang meninggalkan gerakan di lengan, yang menciptakan beberapa ketidakpastian pada tujuan makanan. Penutup atas lengan ketapel, yang menampung biskuit, juga membantu dengan ketidakpastian. Lebih menyenangkan bagi hewan peliharaan untuk menemukan makanan.
Lengan ketapel ditarik ke bawah melalui tali pancing melalui pegangan logam kecil (atau pengumpan, tergantung pada penggunaan Anda), di bawah platform yang menahan sakelar batas (lebih dari itu dalam detik), di sepanjang struktur, melalui yang lain pegangan logam (agar tidak kusut), lalu dipasang ke spindel (saya menggunakan benda plastik yang menahan kapas untuk spindel pada Rotator), yang dipasang ke servo kontinu. Selain itu, saya menggunakan sedikit elastis tipis dan lemah, melekat pada pancing dan kurung Pemicu. Ini memastikan bahwa saat Rotator melepaskan tali pancing tidak tersangkut di mana pun.
Saya menggunakan Tunnel Core ini - Lembaran plastik serbaguna - Papan utilitas dinding ganda untuk cara mudah membuat penutup baterai dan elektronik.
Strukturnya sangat kokoh, namun cukup ringan. Bagian terberatnya adalah baterai lentera, yang akan segera diganti dengan baterai isi ulang AA.
PEMBELAJARAN &MODIFIKASI MASA DEPAN
Seperti apa pun yang Anda bukan ahlinya, selalu ada hal-hal yang dipelajari di sepanjang jalan. Dalam proyek ini, yah, katakan saja Anda akan bosan dengan daftar saya sebelum Anda sampai ke akhir;)
Salah satu masalah terbesar adalah penyumbatan makanan. Lengan pengiriman makanan ini berasal dari sebuah proyek, tetapi sayangnya saya tidak dapat menemukannya. Ini secara sporadis tidak memberikan biskuit apa pun, tetapi ini adalah hal yang baik, itu membuat hewan peliharaan terus menebak-nebak! Tapi, umumnya bekerja dengan sangat baik.
Saya membangun struktur dari aluminium karena anjing kami tidak lembut, jadi ia harus menahannya. Untungnya, sejauh ini berjalan dengan baik.
Saya akan meningkatkan lengan ketapel, membuatnya terlihat sedikit lebih seksi. Sebagian besar elemen penting dapat dipecah untuk memungkinkan akses. misalnya pengiriman makanan, kandang elektronik.
Secara keseluruhan, proyek yang sangat menyenangkan dan anjing kami menyukainya! Saya sangat senang memberikan jawaban atau saran tentang apa pun.
Terima kasih banyak kepada Hackster dan Anda yang telah membaca tentang Automatic Catapult.
Kode
- Ketapel otomatis - kode Arduino
Ketapel otomatis - kode ArduinoArduino
/* * Flinger makanan hewan peliharaan otomatis oleh Nathan King Juni 2018 */#include int FoodDeliveryReleasePosition =115;int FoodDeliveryHoldPosition =0;int TriggerReleasePosition =90;int TriggerHoldPosition =0;int limit_switch =3;int switch_state =0;Pengiriman makanan servo; // buat objek servo untuk mengontrol pemicu armServo pengiriman makanan; // buat objek servo untuk mengontrol pemutar triggerServo; // buat objek servo untuk mengontrol pengaturan rotatorvoid() { rotater.attach(2); // pasang pemicu servo rotator.attach(4); // pasang pemicu servo fooddelivery.attach(5); // melampirkan pinMode servo pengiriman makanan(limit_switch, INPUT); Serial.begin(9600);}void loop() {rotator.write(89); // menghentikan servo Rotator bergerak - tidak perlu jika Anda memiliki servo yang bagus;) delay(500);// Mulai posisi fooddelivery.write(FoodDeliveryHoldPosition); penundaan (1000); trigger.write(TriggerHoldPosition); penundaan (1000); trigger.write(TriggerReleasePosition); delay(1000);// limit switch loop untuk menghentikan Rotator servo switch_state =digitalRead(limit_switch); Serial.println(switch_state); while (switch_state ==HIGH) { switch_state =digitalRead(limit_switch); Serial.println("Sakelar dimatikan"); pemutar.tulis(75); // memulai Rotator searah jarum jam dengan kecepatan xx (0-255) } Serial.println("Switch aktif"); pemutar.tulis(89); // menghentikan servo Rotator// Memegang lengan ketapel pada pelatuk dan mengatur ulang Rotator ke posisi awal trigger.write(TriggerHoldPosition); penundaan (1000); pemutar.tulis(110); penundaan (4500); pemutar.tulis(89); penundaan(2000); // Pengiriman makanan ke ketapel fooddelivery.write(FoodDeliveryReleasePosition); penundaan (500); fooddelivery.write(Posisi FoodDeliveryRelease); // tunggu makanan jatuh delay(1000); fooddelivery.write(FoodDeliveryHoldPosition); delay(150);// Ini untuk menambahkan penundaan antara pengiriman makanan dan pemicu yang melepaskanrotator.write(89); penundaan (1000); // Lepaskan ketapel!! trigger.write(TriggerReleasePosition); penundaan(3000); // tunda hewan peliharaan untuk menemukan makanan - edit ini untuk mengubah seberapa cepat makanan dikirim :)}
Skema