

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Ikhtisar Proyek
Dalam proyek ini saya memanfaatkan kekuatan Arduino untuk membuat rangkaian untuk menyalakan gerbang geser. Tujuan utama dari proyek ini adalah untuk memanfaatkan gerbang geser mati dengan motor AC yang berfungsi dan mengotomatisasi sistem menggunakan Arduino, beberapa relai, penerima 433MHz, pemancar 433MHz, dan beberapa keterampilan listrik yang licik. Sistem ini menciptakan metode untuk menyalakan motor gerbang saat diperlukan dan untuk memutuskan apakah akan membuka atau menutup gerbang.
Arduino terus-menerus mendengarkan respons yang ditetapkan dari pemancar, dalam hal ini adalah remote yang digunakan untuk membuka atau menutup gerbang. Pemancar beroperasi pada dua saluran, di mana setiap saluran memiliki ID uniknya sendiri. Setelah ID ini diterima oleh penerima 433MHz, ia mengirimkan sinyal ke Arduino yang mengontrol Relai untuk memberi daya pada motor.
Metodologi
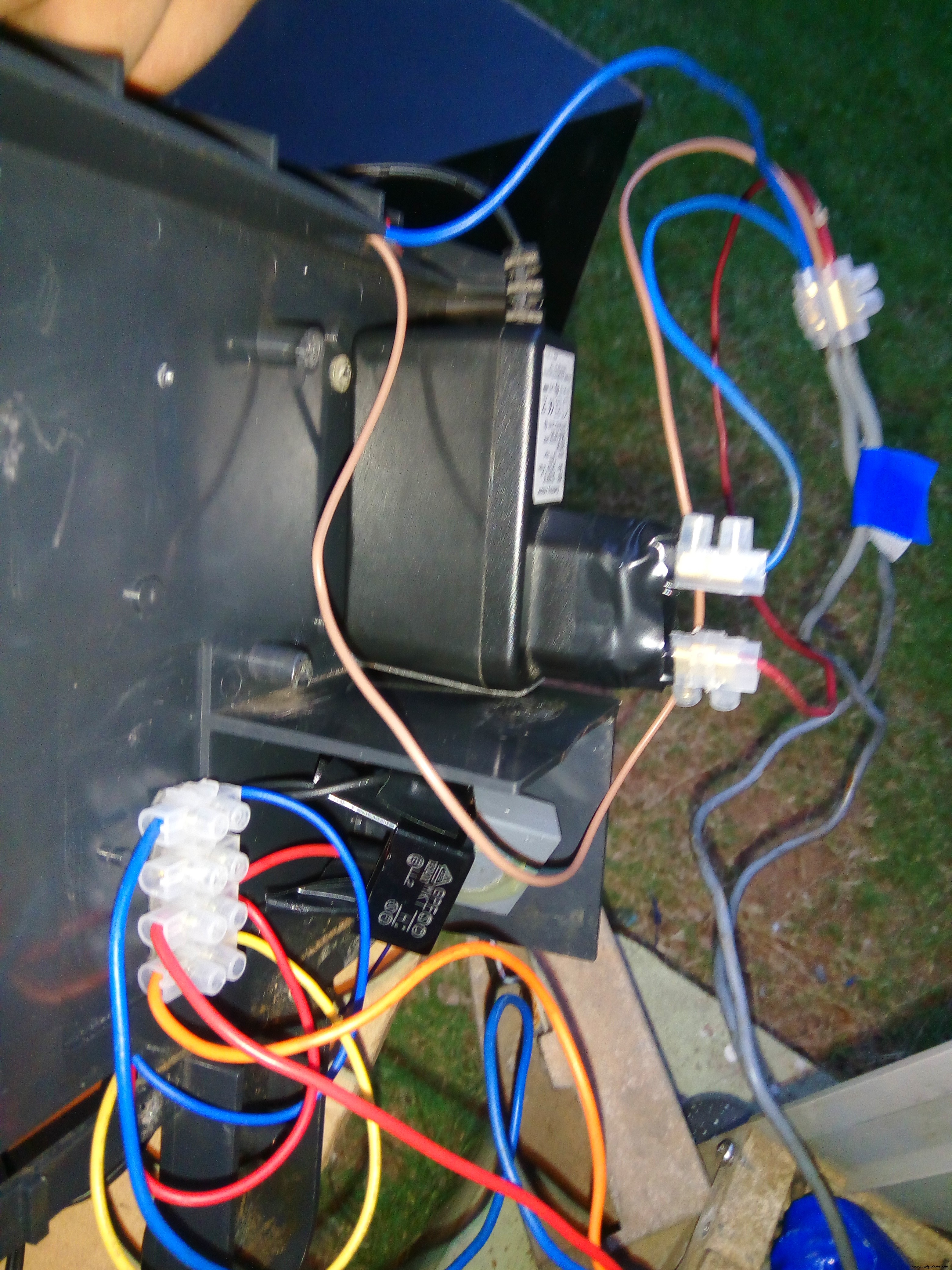
Langkah 1 :Menghidupkan motor
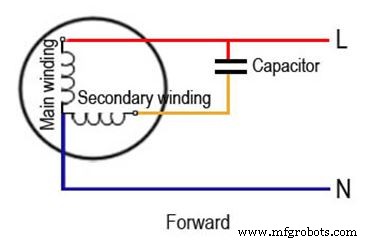
Konfigurasi untuk menyalakan motor ditunjukkan di bawah ini. Agar motor dapat menggerakkan gerbang ke arah depan (menutup), belitan Utama harus dihubungkan ke daya utama.
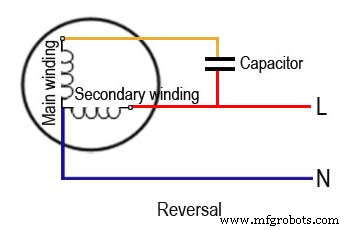
Agar motor bergerak ke arah yang berlawanan (terbuka), belitan Sekunder harus dihubungkan ke daya utama.
Penting untuk mengidentifikasi kabel mana yang sesuai dengan belitan mana. Biasanya kabel tidak diberi label dan ini dapat diidentifikasi dengan coba-coba dengan memasok daya AC ke kabel.
Dalam kasus saya, saya bekerja dengan motor 220~240VAC. Saya dapat mengidentifikasi kabel Netral dengan mudah karena berwarna biru yang merupakan warna standar yang digunakan untuk menunjukkan terminal Netral.
Selanjutnya, saya menghubungkan terminal Live ke kabel merah, yang membuat motor berputar ke arah depan. Ini menunjukkan bahwa saya mensuplai daya ke Main Winding dari Motornya.
Catatan: Pastikan kapasitor starter terhubung dengan baik dan berfungsi. Ini memastikan bahwa motor memiliki torsi awal yang memadai.
Langkah 2 :Menghentikan motor
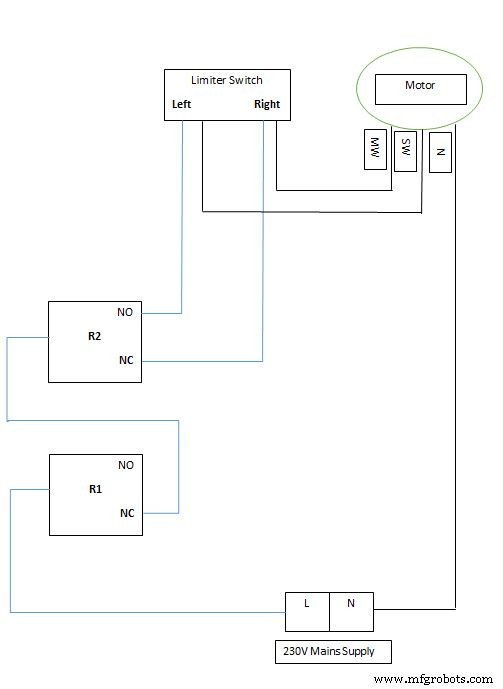
Daya listrik diberikan ke motor melalui sakelar pembatas. Segera setelah gerbang mencapai salah satu ujung, sakelar pembatas dipicu yang membuka sirkuit dan menghentikan suplai daya utama ke motor.
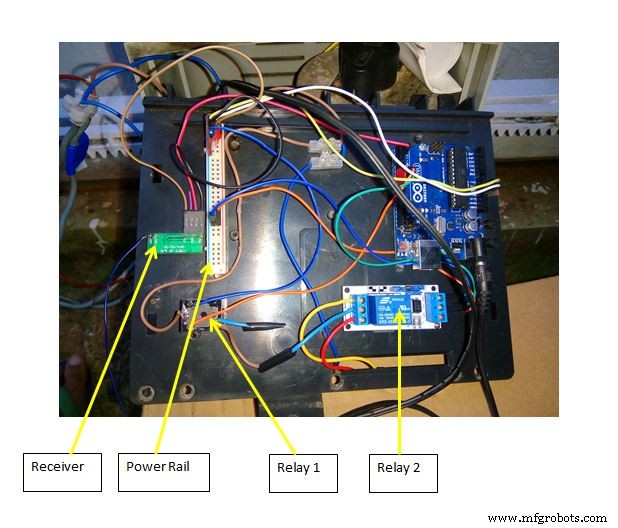
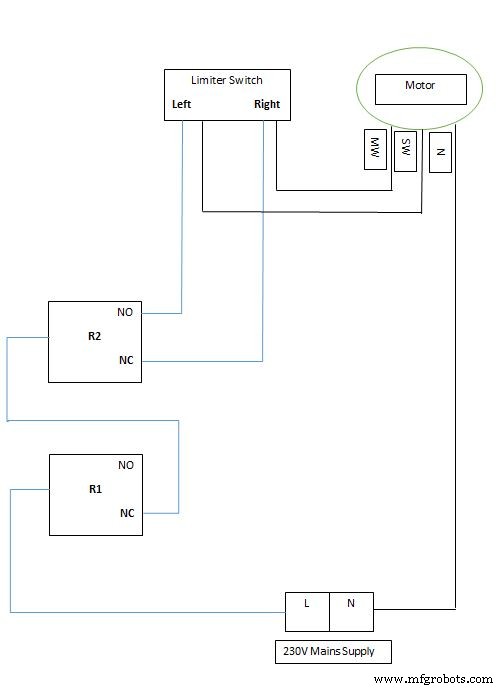
Langkah 3 :Menggunakan relai untuk mengontrol motor
Relai memiliki dua titik kontak; Biasanya terbuka dan Biasanya tertutup.
Jalur yang biasanya tertutup digunakan untuk memberi daya pada belitan utama motor. Ini dipilih untuk memastikan bahwa ketika sistem disetel ulang atau jika ada yang tidak beres dalam sistem, motor akan memastikan bahwa gerbang tetap tertutup sepanjang waktu.
Jalur yang biasanya terbuka digunakan untuk memberi daya pada belitan sekunder motor. Jalur yang biasanya terbuka ditutup ketika koil di dalam relai diberi energi. Ini dapat dilakukan dengan mengirimkan sinyal 5V dari Arduino karena relai yang digunakan beroperasi di bawah 5V.
Dengan menggunakan dua jalur untuk memberi daya, motor memastikan bahwa daya tidak diberikan secara bersamaan ke gulungan Sekunder Mainand motor.
Relai ini(R2 ) dioperasikan melalui pin 8 dari Arduinonya.
Relai kedua(R1 ) digunakan untuk memutuskan rangkaian agar motor berhenti jika Arduino menerima perintah dari penerima saat gerbang bergerak.
Arduino terus-menerus memeriksa penerima jika telah menerima perintah apa pun. Setelah perintah dikeluarkan, Arduino mengalihkan daya ke motor untuk menutup atau membuka gerbang.
Tujuan utama dari relai kedua adalah memberikan waktu yang cukup bagi sistem untuk merutekan ulang sistem ke daya motor tanpa langsung mengubah arah putaran motor. Setelah pengubahan rute selesai, relai mati dan daya disuplai ke motor untuk berputar ke arah yang berlawanan.
Relay ini dioperasikan melalui pin 9 dari Arduino.
Tujuan Relai Kedua
Jika sistem setengah jalan menutup gerbang dan menerima perintah dari penerima untuk membuka gerbang, relai diaktifkan untuk mengalihkan daya ke belitan sekunder. Karena ini terjadi hampir seketika, relai berada di bawah tekanan konstan dari tegangan balik yang dihasilkan oleh motor karena aliran daya tiba-tiba ke belitan utama. Selanjutnya, merusak kontak relai secara permanen jika terus menerus tertekan.
Dengan bantuan relai tambahan, catu daya diputuskan ke motor dan memberi sistem waktu 10 detik untuk mengalihkan daya ke belitan yang diperlukan. Ini mengurangi tekanan pada kontak relai dan meningkatkan masa pakainya.
Metode perlindungan relai:
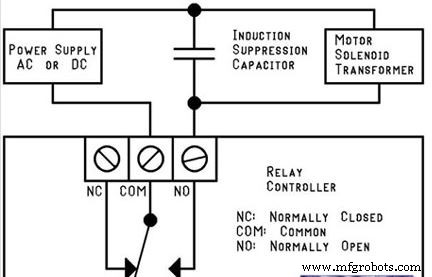
Kapasitor Supresi
Ketika motor DC tiba-tiba berhenti, loop arus negatif dibuat oleh kumparan motor, ini karena sifat induktif dari kumparan. Namun hal ini dapat dinetralkan dengan memasang dioda umpan balik untuk menyediakan jalur bagi arus negatif untuk mengalir.
Ketika motor AC tiba-tiba berhenti melalui sakelar, itu menciptakan tegangan tinggi yang menumpuk pada kontak sakelar.
Kapasitor penekan digunakan untuk mencegah timbulnya tegangan tinggi pada kontak relai ketika motor diperintahkan untuk beroperasi dalam arah yang berlawanan. Ini melindungi kontak relay.

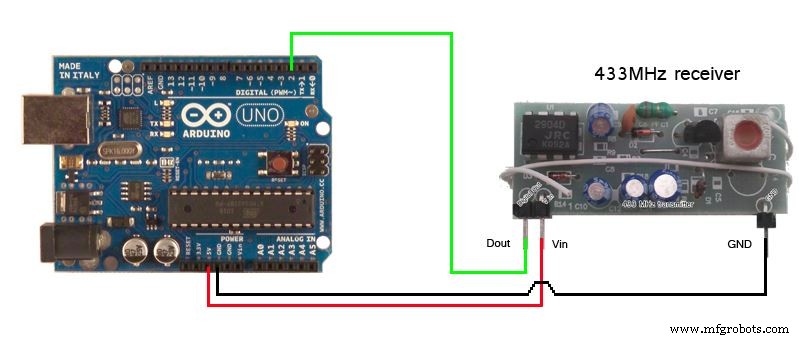
Langkah 4 :Untuk mengkonfigurasi penerima
Penerima beroperasi pada 433 MHz, program Arduino terus di-loop untuk memeriksa port sinyal penerima. Setelah sinyal yang benar diterima, Arduino kemudian mengaktifkan Relay 1(R1) agar Relay 2(R2) menyalurkan daya ke motor.
Ketika data dikirim dari pemancar, itu diterima oleh penerima dalam bentuk bilangan bulat. Dalam kasus saya, dengan menggunakan monitor serial Arduino, saya dapat melihat nilai yang dapat diambil oleh receiver.
Alasan utama penggunaan frekuensi radio yang lebih tinggi untuk komunikasi adalah karena jangkauan operasi yang tinggi dan sinyal diterima oleh penerima meskipun ada beberapa hambatan yang menghalangi sinyal. Ini hanya dapat dicapai dengan gelombang radio frekuensi tinggi.
Dalam proyek saya, saya bisa mendapatkan radius kerja sekitar 30 kaki untuk mengaktifkan sistem.
Catatan: Jari-jari fungsi sistem dapat diperluas beberapa kaki dengan menyolder kabel yang panjang ke Antena port di modul penerima.

Video Demo
Cuplikan Proyek Akhir
Proses manufaktur
Transmisi Tenaga Listrik Transmisi tenaga listrik adalah suatu proses dimana tenaga listrik yang dihasilkan di pembangkit listrik diangkut dalam jumlah besar melalui jarak yang jauh untuk digunakan pada akhirnya oleh konsumen. Tenaga listrik dikirim dari pembangkit listrik ke konsumen akhir melalu
A Ketika kita berbicara tentang pengelasan tiba-tiba muncul gambaran di benak kita bahwa itu adalah proses penyambungan dua bagian logam. Tetapi untuk lebih memahami topik ini, pengelasan tidak terbatas pada logam dan keramik saja, tetapi juga digunakan dalam industri plastik untuk tujuan yang sama
Menjalankan Motor Induksi 3-Φ pada Suplai 1 Fasa – 3 Metode Menurut jenis catu daya AC, motor induksi diklasifikasikan menjadi dua jenis; motor induksi tiga fasa dan motor induksi satu fasa. Di sebagian besar aplikasi industri dan pertanian, motor induksi tiga fase banyak digunakan dibandingkan deng
Motor spindel adalah motor listrik kecil, berpresisi tinggi, dan andal di dalam hard drive yang memutar poros (spindel) tempat piringan dipasang. Piring digunakan untuk menyimpan data. Motor spindel drive hard disk dipasang dalam satu unit, dan memutar piringan dengan kecepatan konstan. Sensor kec