

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 19 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
 |
| |||
|
 |
| |||
| ||||
|
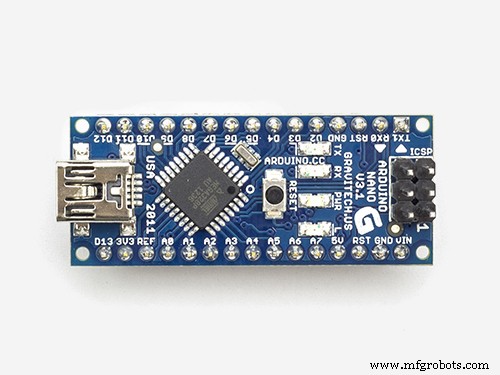
Selama beberapa bulan terakhir, pandemi COVID-19 telah menyebarkan kekacauan di seluruh dunia. Ada infeksi yang tak terhitung jumlahnya dan sayangnya banyak korban. Salah satu langkah terpenting yang disarankan oleh Organisasi Kesehatan Dunia adalah mencuci tangan secara konstan dengan sabun atau pembersih tangan. Tapi salah satu masalah yang paling signifikan adalah cara kita melakukannya dan itu adalah dengan menyentuh secara fisik dispenser yang menghilangkan seluruh tujuan tindakan dan bahkan menciptakan risiko infeksi yang besar. Jadi Saya , anak laki-laki berusia 14 tahun , memutuskan untuk membuat sesuatu menggunakan papan Arduino Nano yang dapat mengatasi masalah ini, tetapi saya juga menginginkannya murah dan dapat dipasang ke banyak dispenser berbeda dengan mudah, cepat, dan efektif! Dan inilah yang saya buat, aksesori yang dapat dilampirkan ke sebagian besar pembersih tangan/tempat sabun dan putar sepenuhnya handsfree dan otomatis
Pertama, tonton video ini untuk melihat cara kerja perangkat dan juga untuk memahami cara kerjanya dan cara pembuatannya!
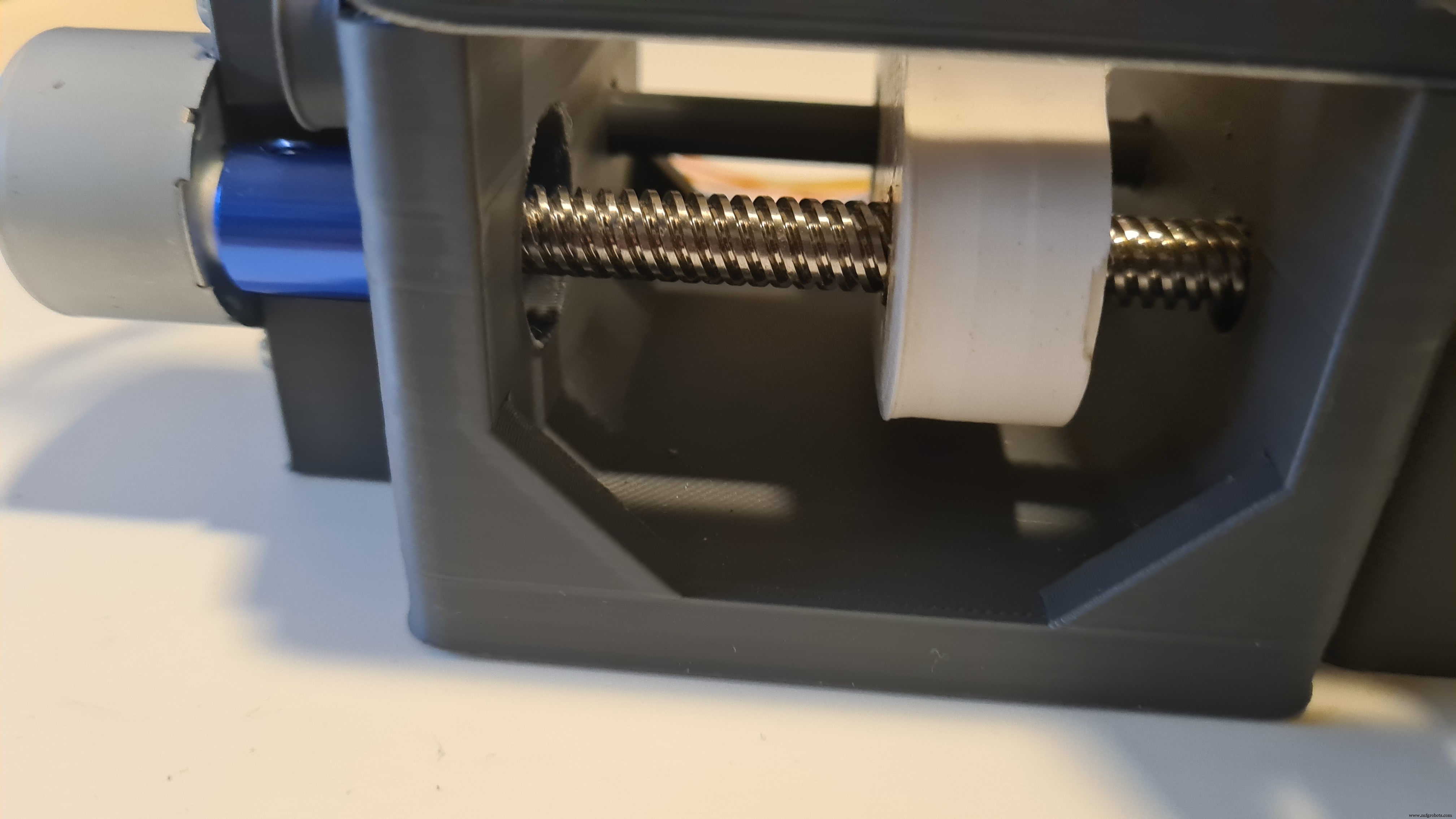
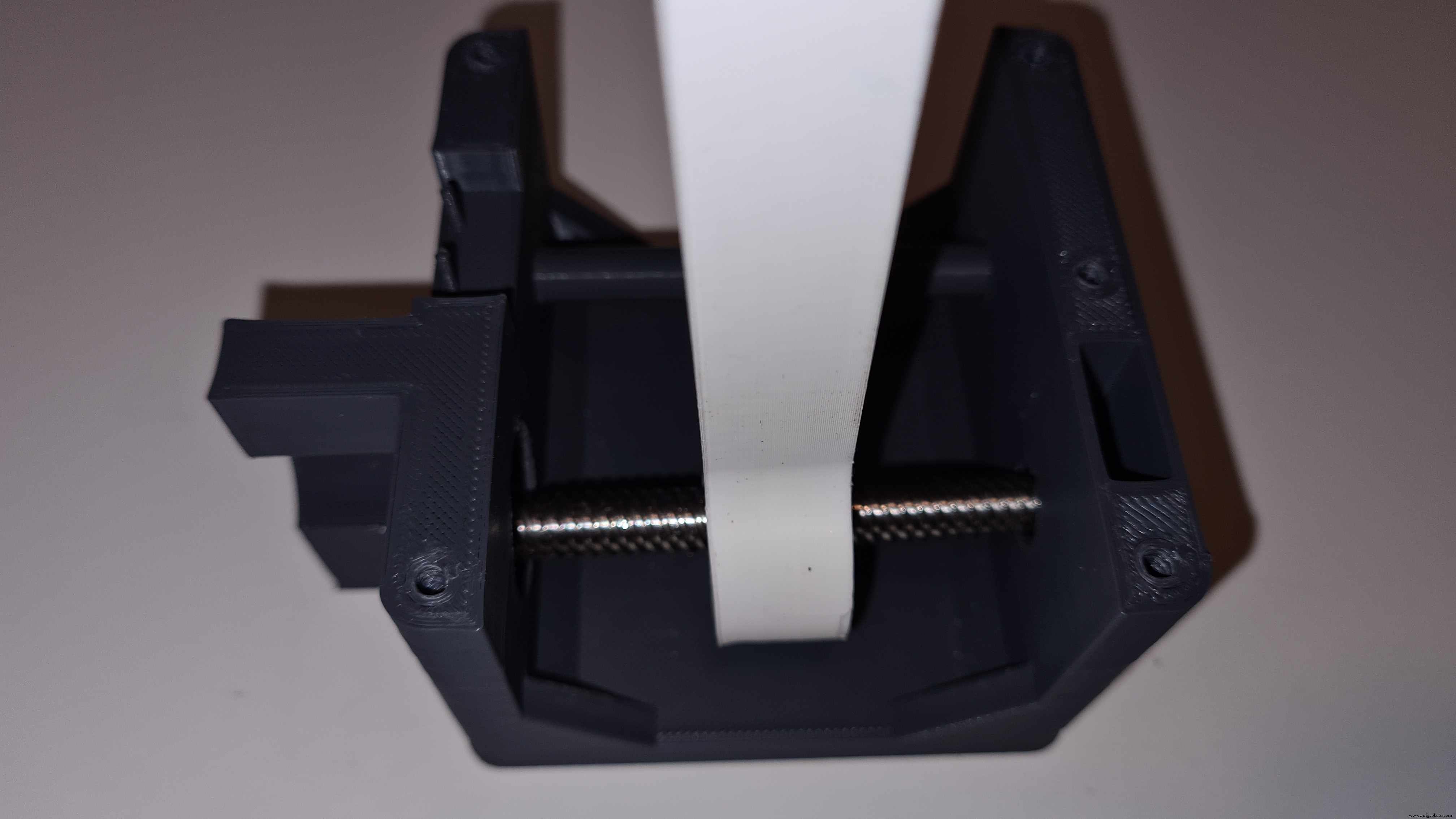
Langkah 1:Pahami Mekanismenya


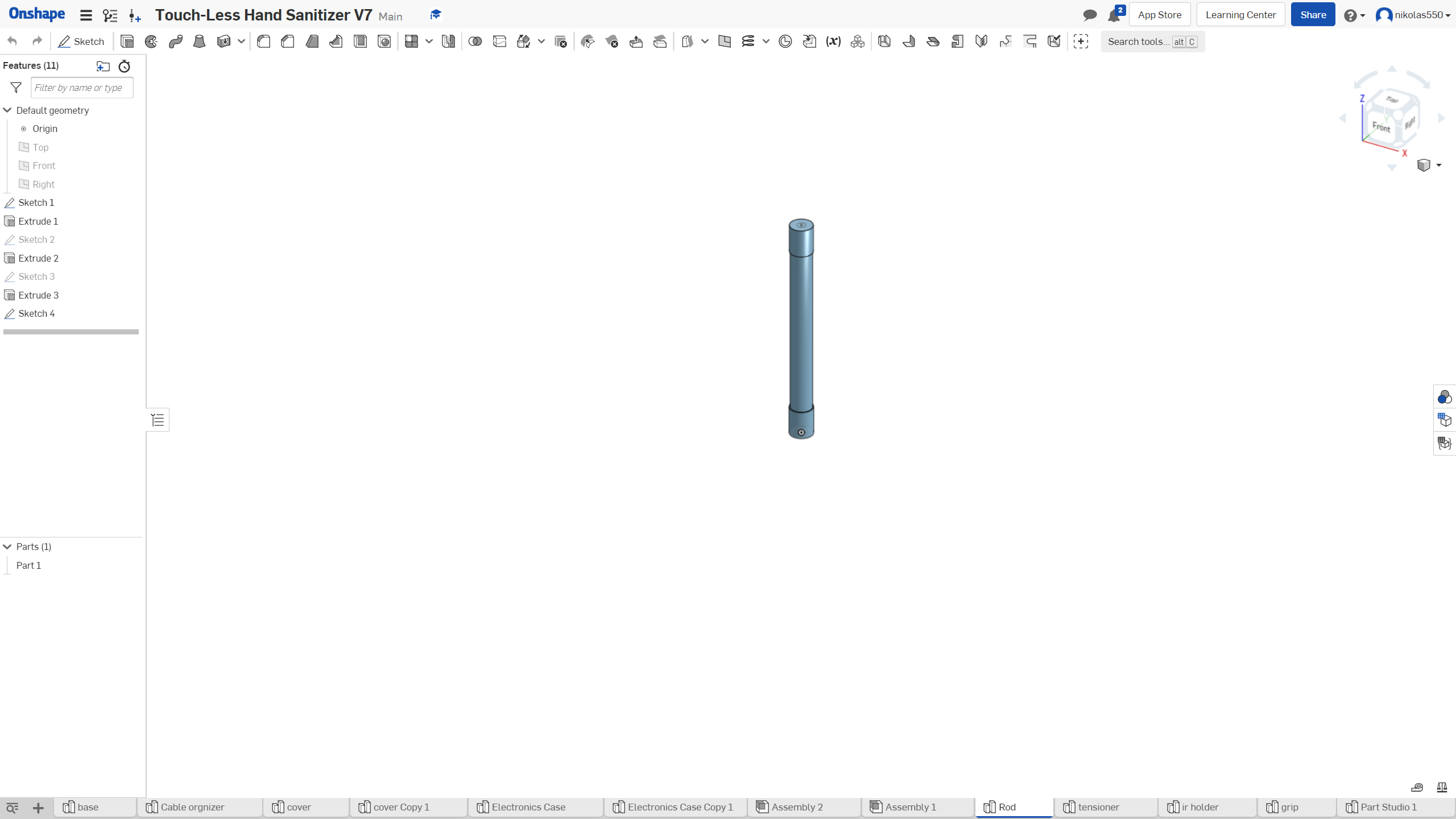
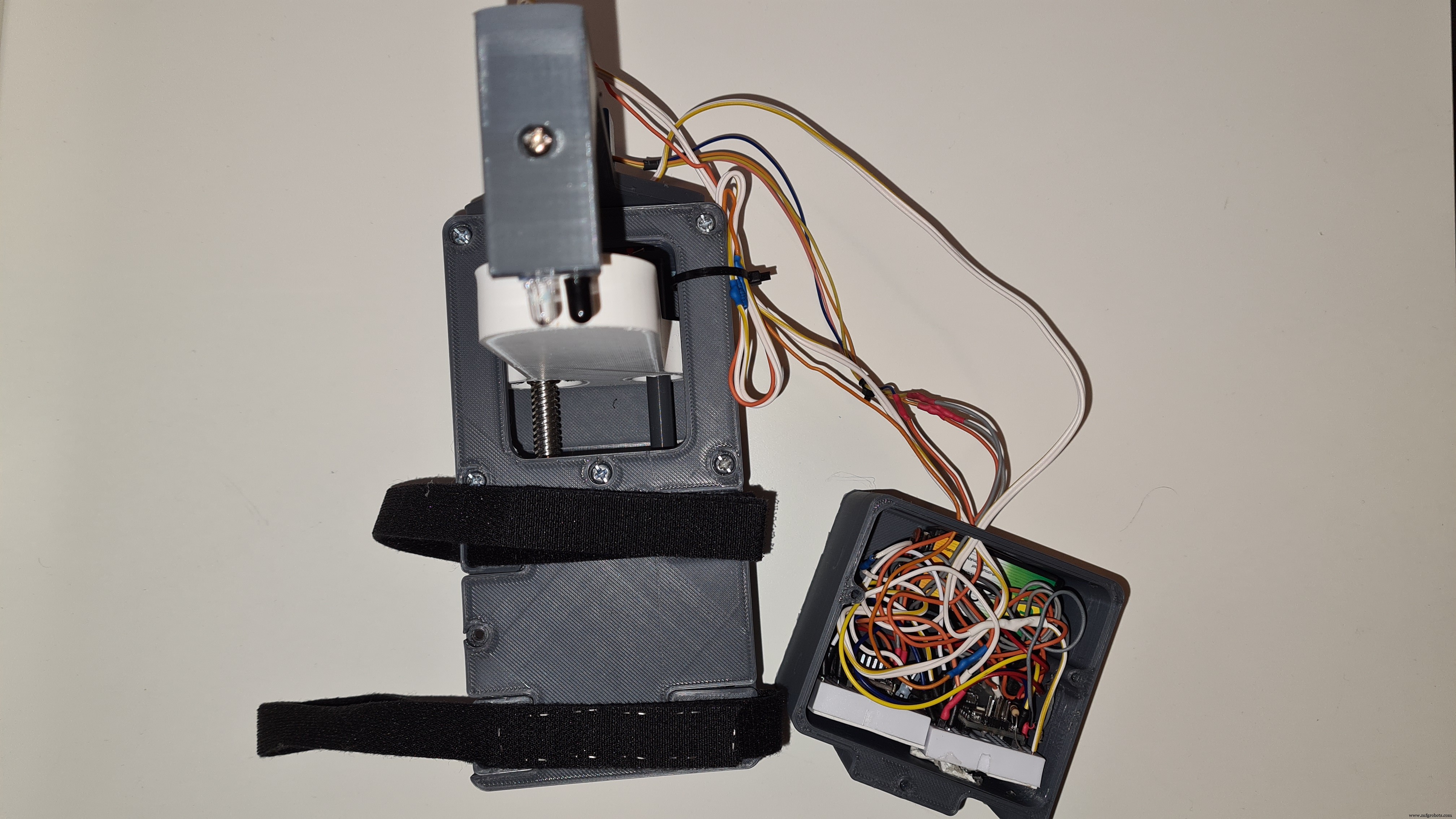
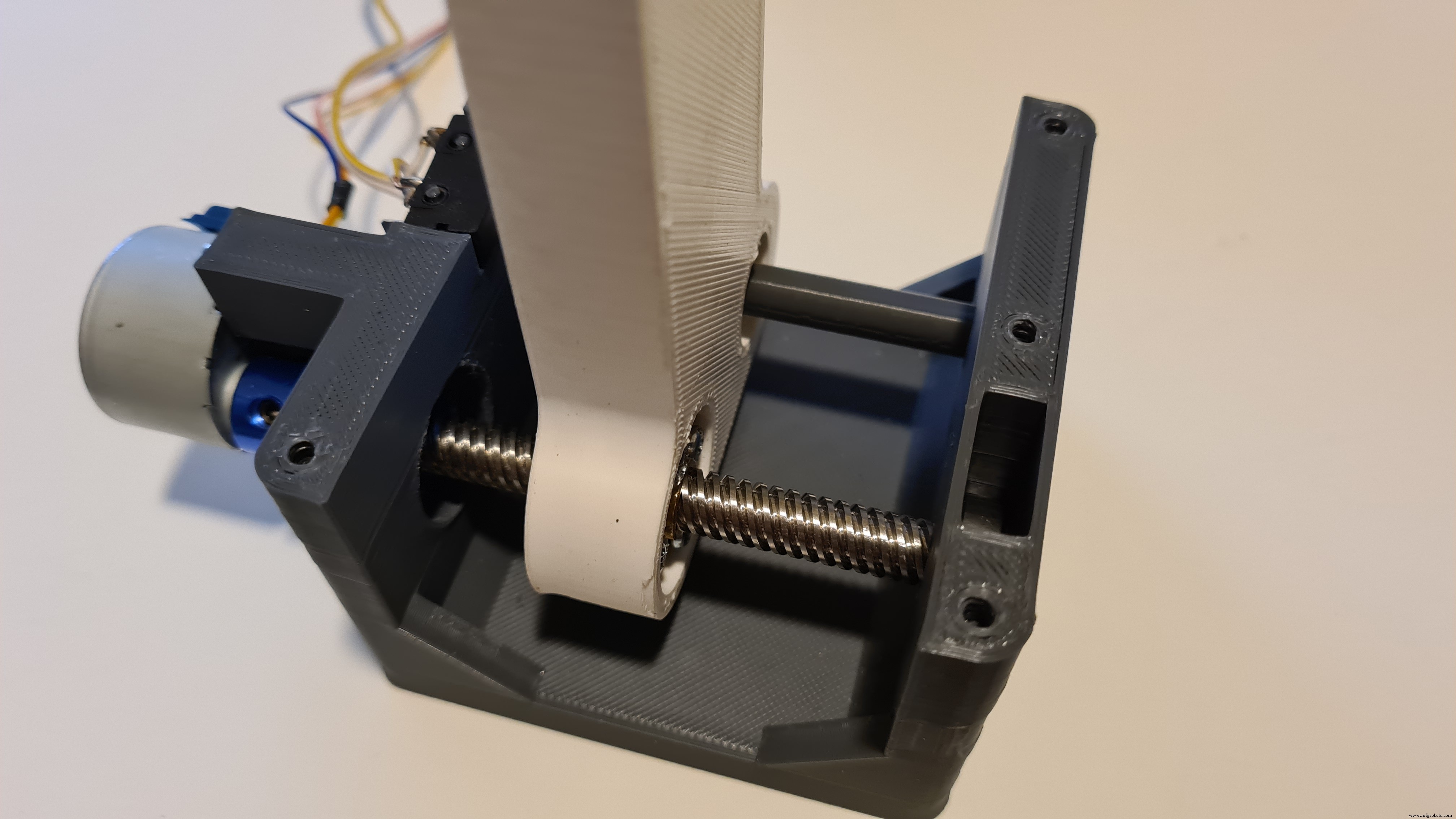
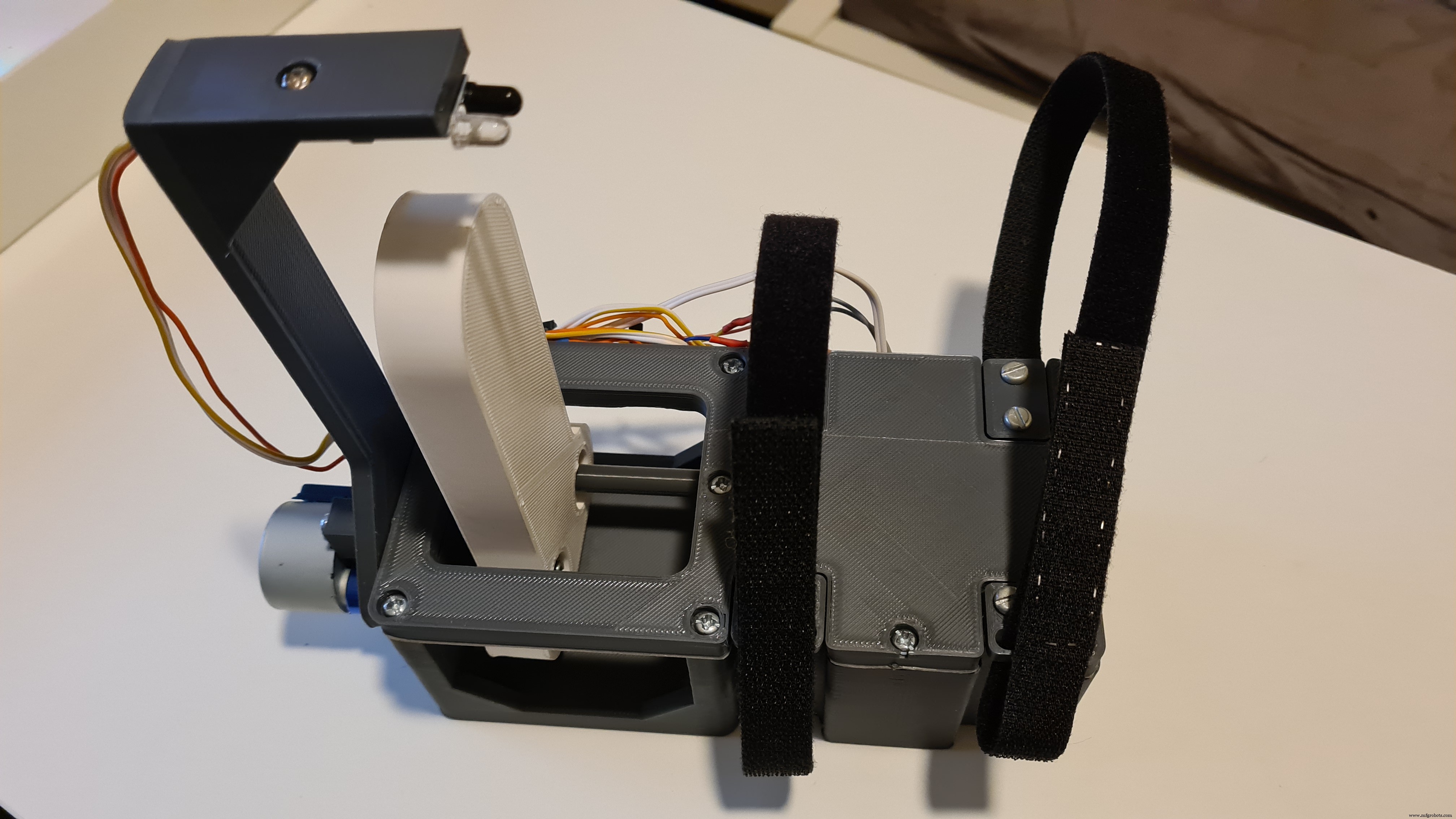
Jadi pada dasarnya motor stepper dihubungkan dengan coupler ke sekrup. Kemudian penekan cetak 3D dihubungkan pada satu sisi dengan sekrup menggunakan mur dan pada sisi lainnya ditopang oleh batang cetakan 3D. Batang tidak memungkinkan gaya putar sekrup untuk memutar penekan dan sebaliknya penekan bergerak linier . Dengan cara ini kita dapat memerintahkan stepper untuk bergerak ke segala arah (maju mundur), dengan kecepatan berapa pun dan untuk langkah sebanyak yang kita suka.
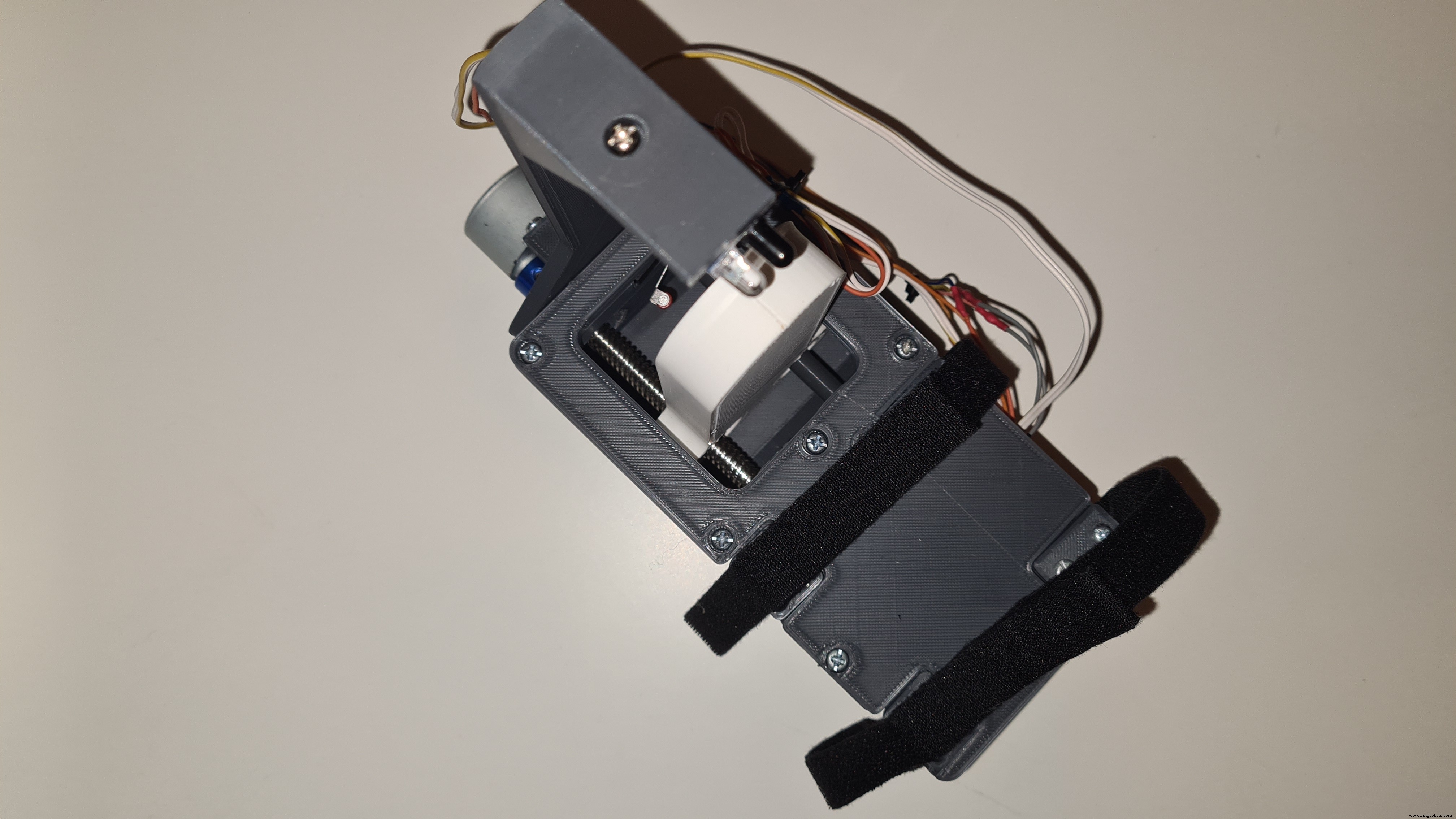
Langkah 2:Pahami Cara Kerja Perangkat


Konsepnya adalah ketika Sensor Penghalang IR, yang terpasang pada Dudukan IR cetak 3D, diaktifkan, hanya dengan meletakkan tangan Anda beberapa sentimeter di bawahnya, penekan turun sejauh yang ditentukan, (menekan dispenser) menunggu 2 detik dan kemudian kembali ke posisi awal hanya dengan naik sampai sakelar penghenti akhir diaktifkan. Demikian pula saat perangkat pertama kali dihidupkan, penekan akan naik hingga sakelar diaktifkan dan kemudian berhenti di sana, sebagai semacam kalibrasi sendiri sehingga penekan siap digunakan.


Kemudian menggunakan Velcros, Anda membungkus Hand-Sanitizer pilihan Anda dan kencangkan sebanyak mungkin.
Sekarang Dispenser Pembersih Tangan Otomatis berfungsi!!
Langkah 3:Kumpulkan Komponen yang Diperlukan
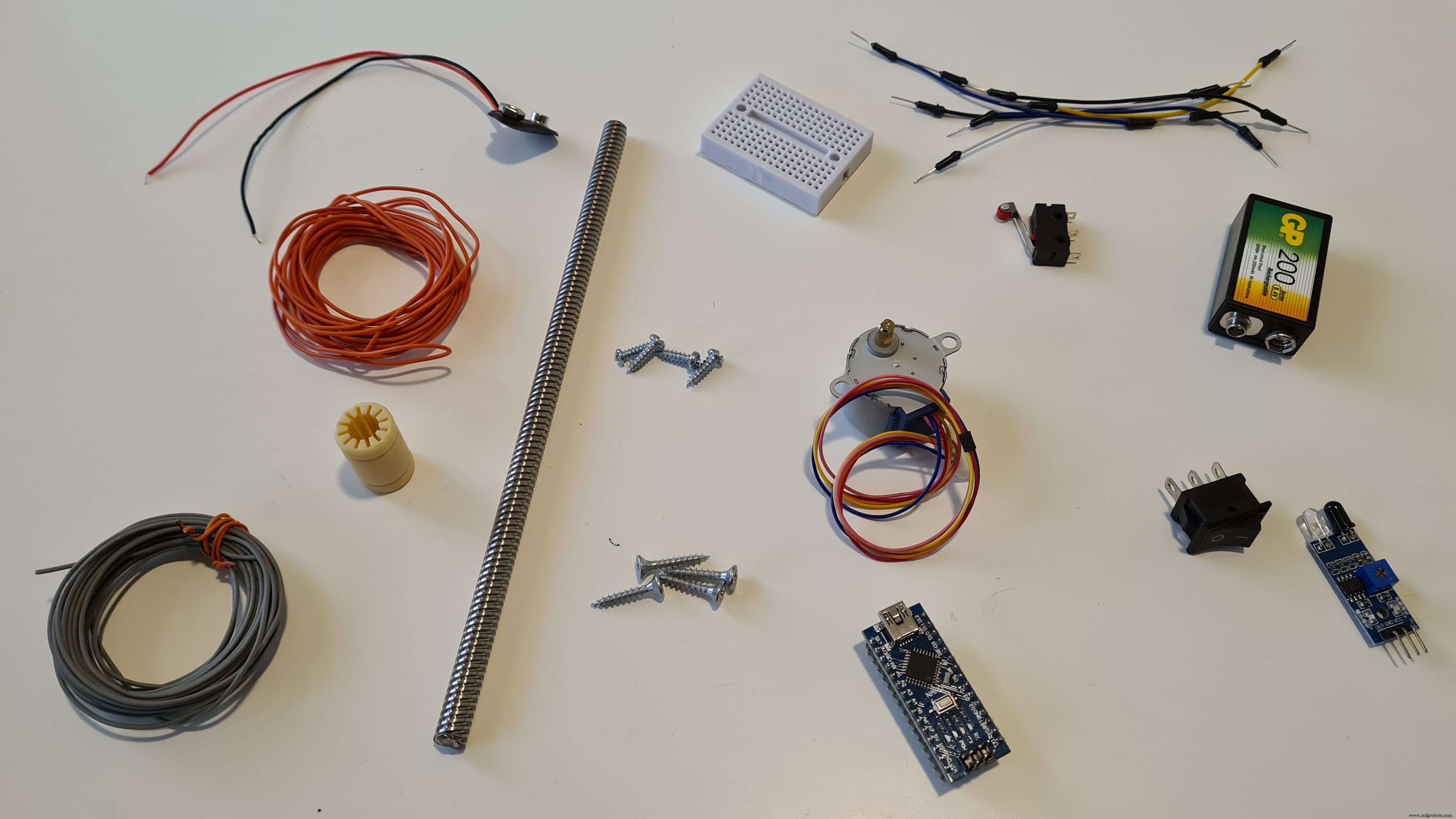
Semua tautan komponen yang diperlukan terletak di Bagian "Hal".
Langkah 4:Rancang Suku Cadang Kustom
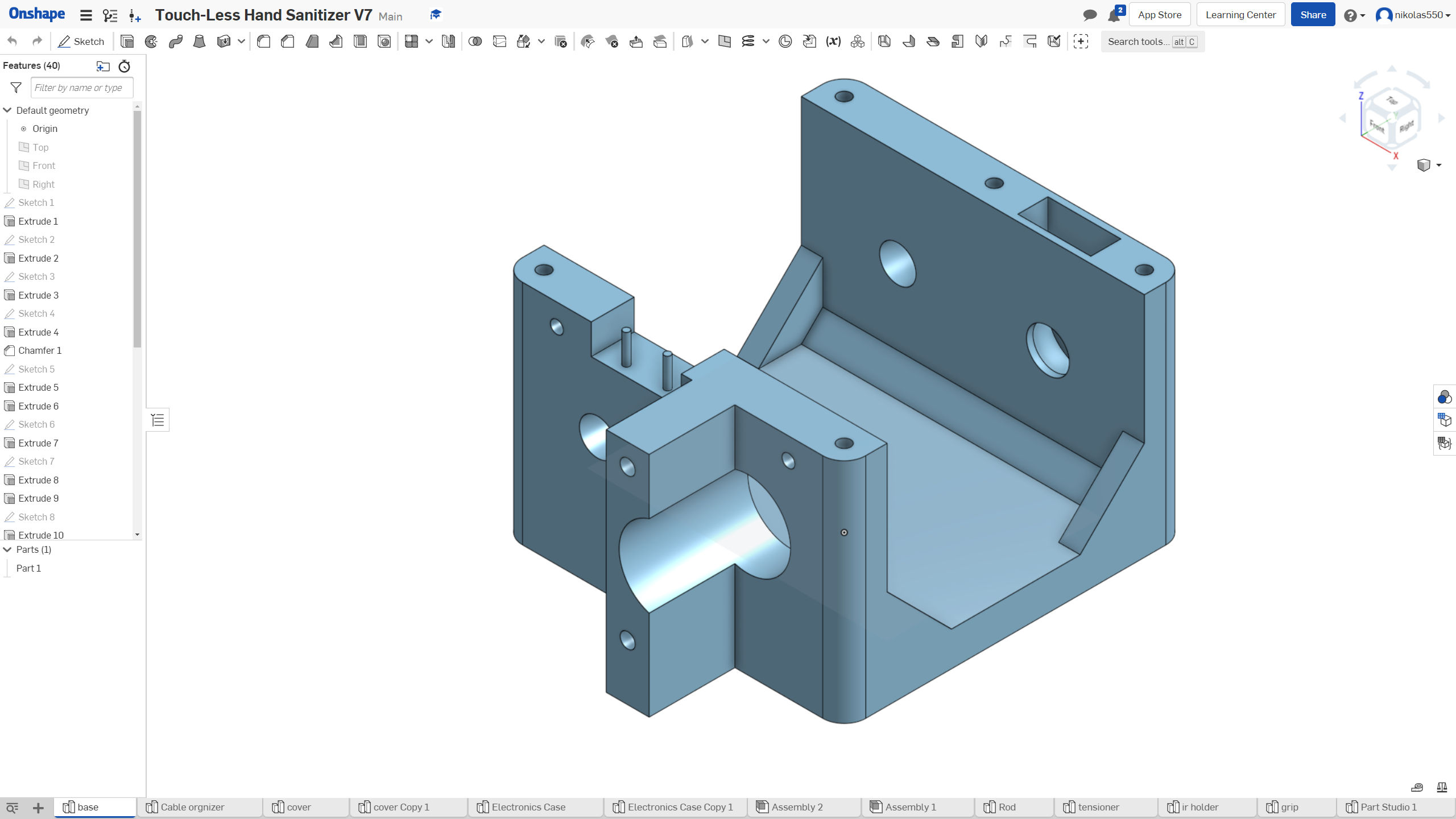
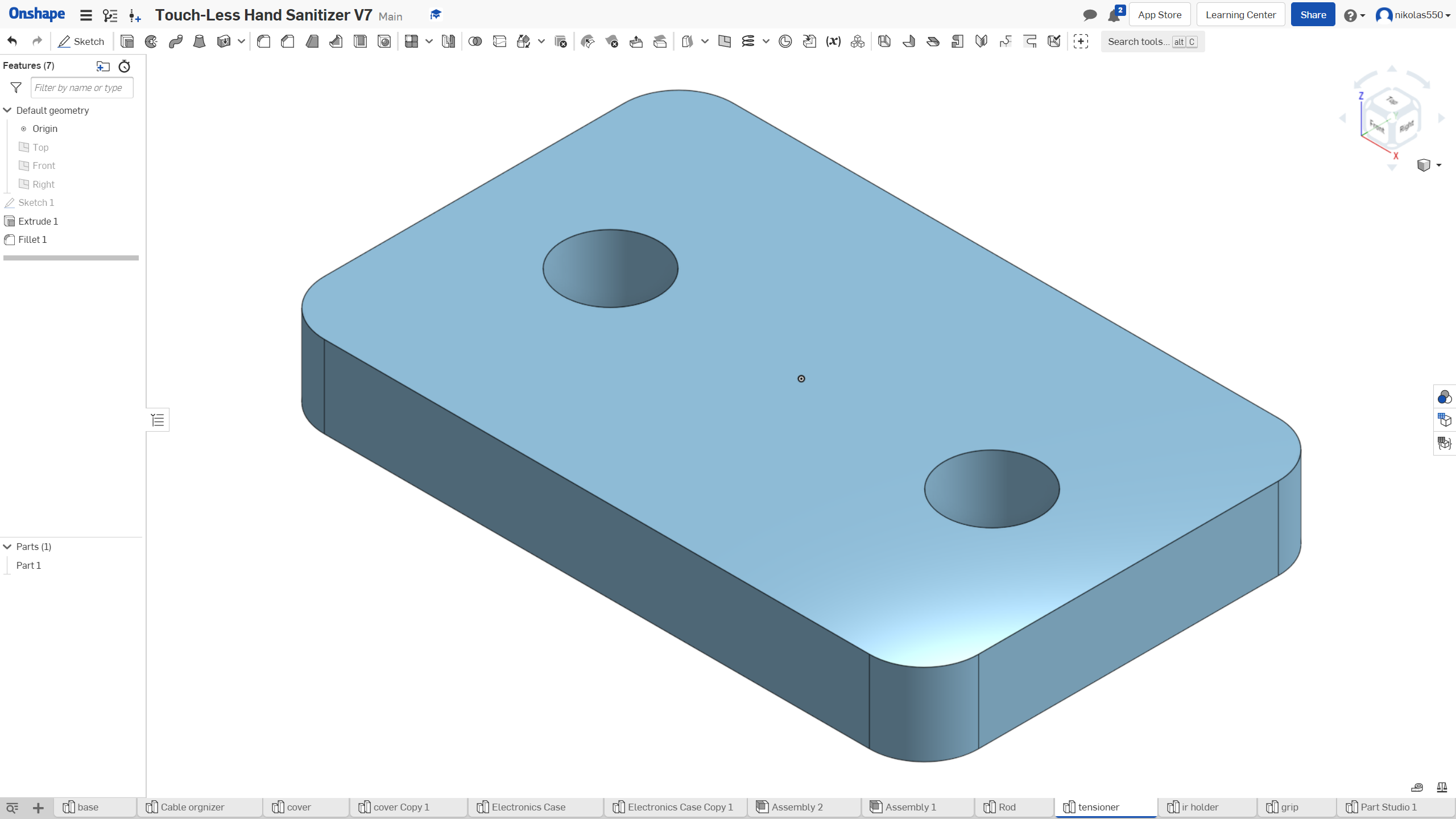
Semua bagian cetakan 3D dirancang oleh saya di Onshape tetapi Anda tidak perlu khawatir tentang perancangan 3D karena saya telah menyediakan semua file .stl di Bagian "Lampiran".
Langkah 5:Bagian Plastik Kustom Pencetakan 3D




Saya mencetak 3D bagian-bagian pada Creality3D Ender 3 V2 saya dalam Gray and White PLA pada ketinggian lapisan 0,2mm dan pada pengisian 20%. Jika Anda tidak memiliki akses ke printer 3D, Anda dapat mencoba menggunakan karton atau kayu.
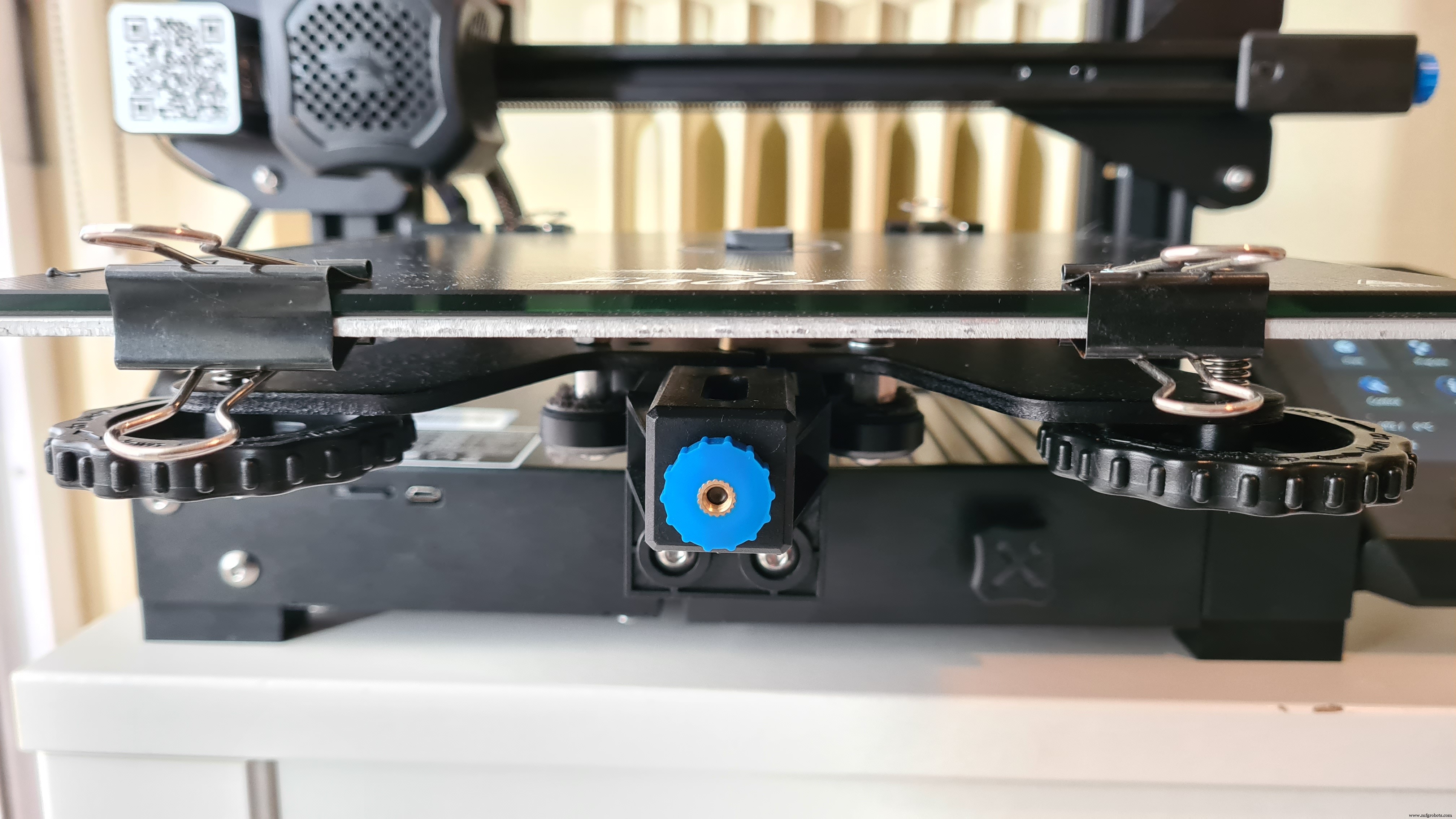
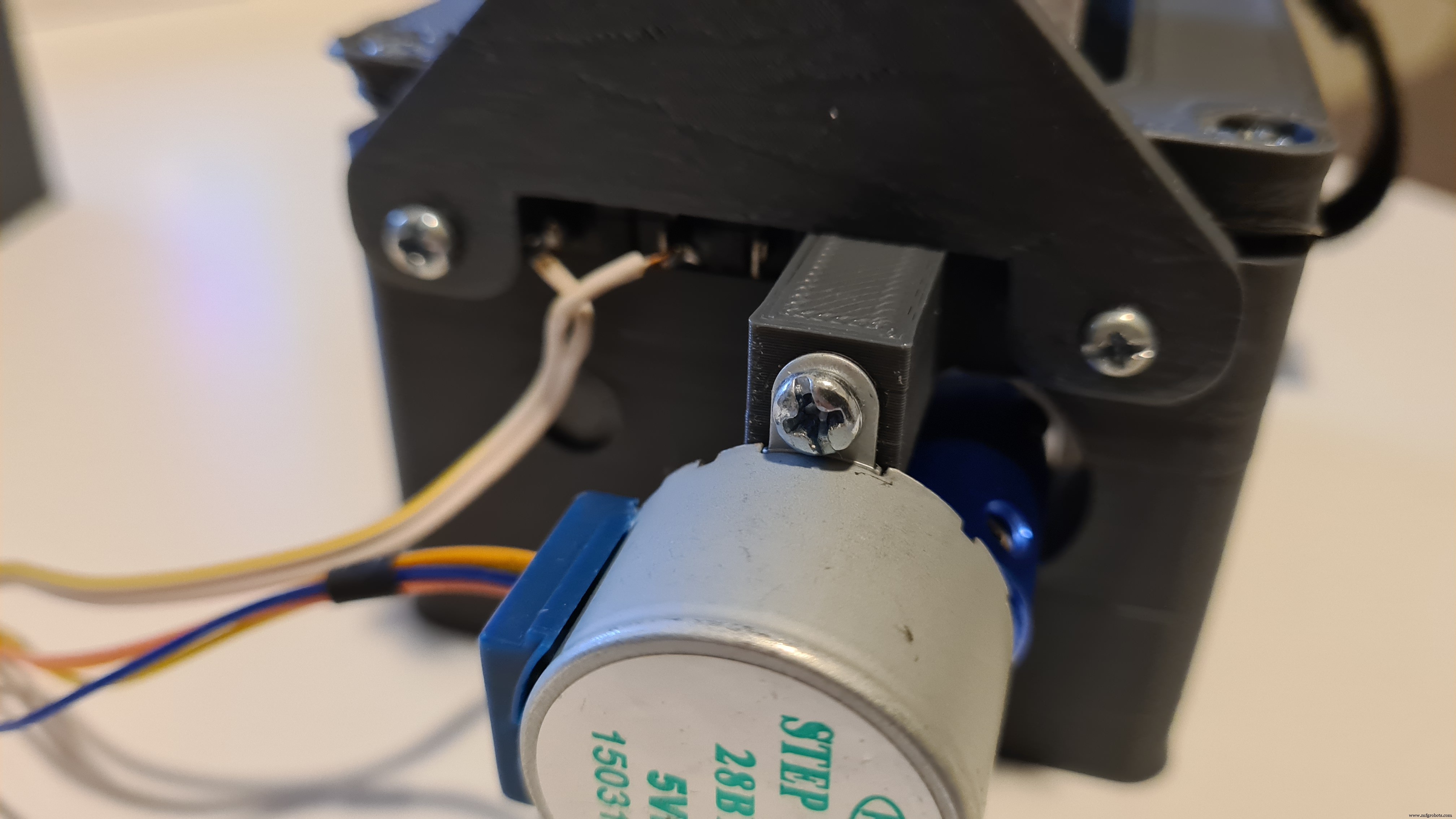
Langkah 6:Memodifikasi stepper

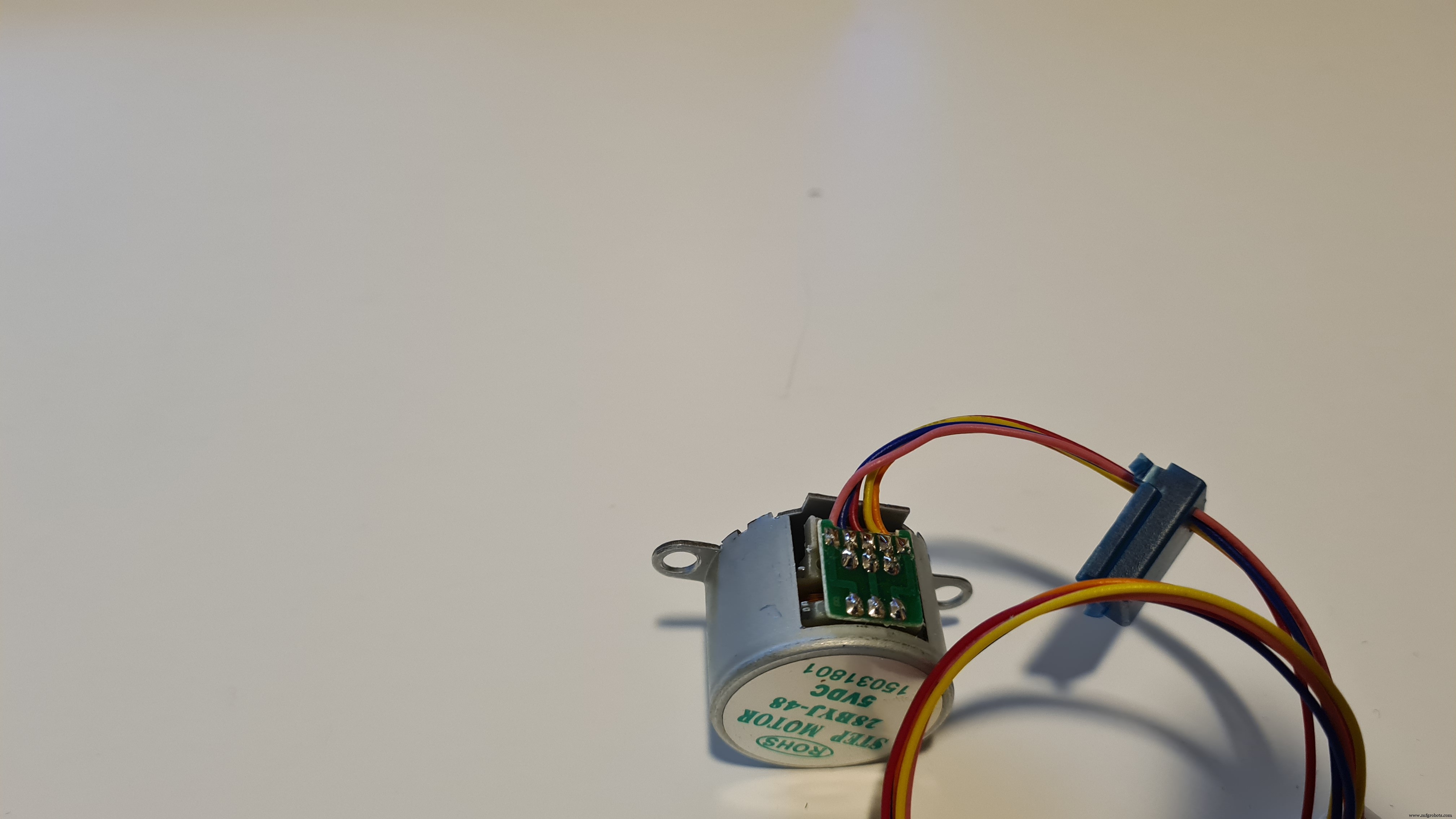
Motor stepper 28BYJ-48 adalah motor stepper kecil dan sangat murah. Ini adalah motor stepper unipolar dan memiliki torsi sekitar 300 g/cm yang bekerja dengan proyek kami tetapi saya ingin itu menjadi lebih kuat untuk hasil yang lebih baik. Kami dapat meningkatkan torsi menjadi 800+ g/cm dengan mengonversi menjadi bipolar motor dengan mod yang simpel dan mudah!
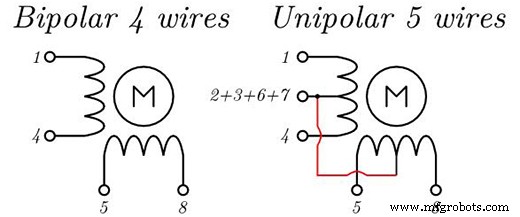
Stepper bipolar memiliki kumparan yang lebih besar dan sebagai hasilnya lebih banyak torsi .

Pertama, Anda ingin melepas penutup biru dengan obeng.
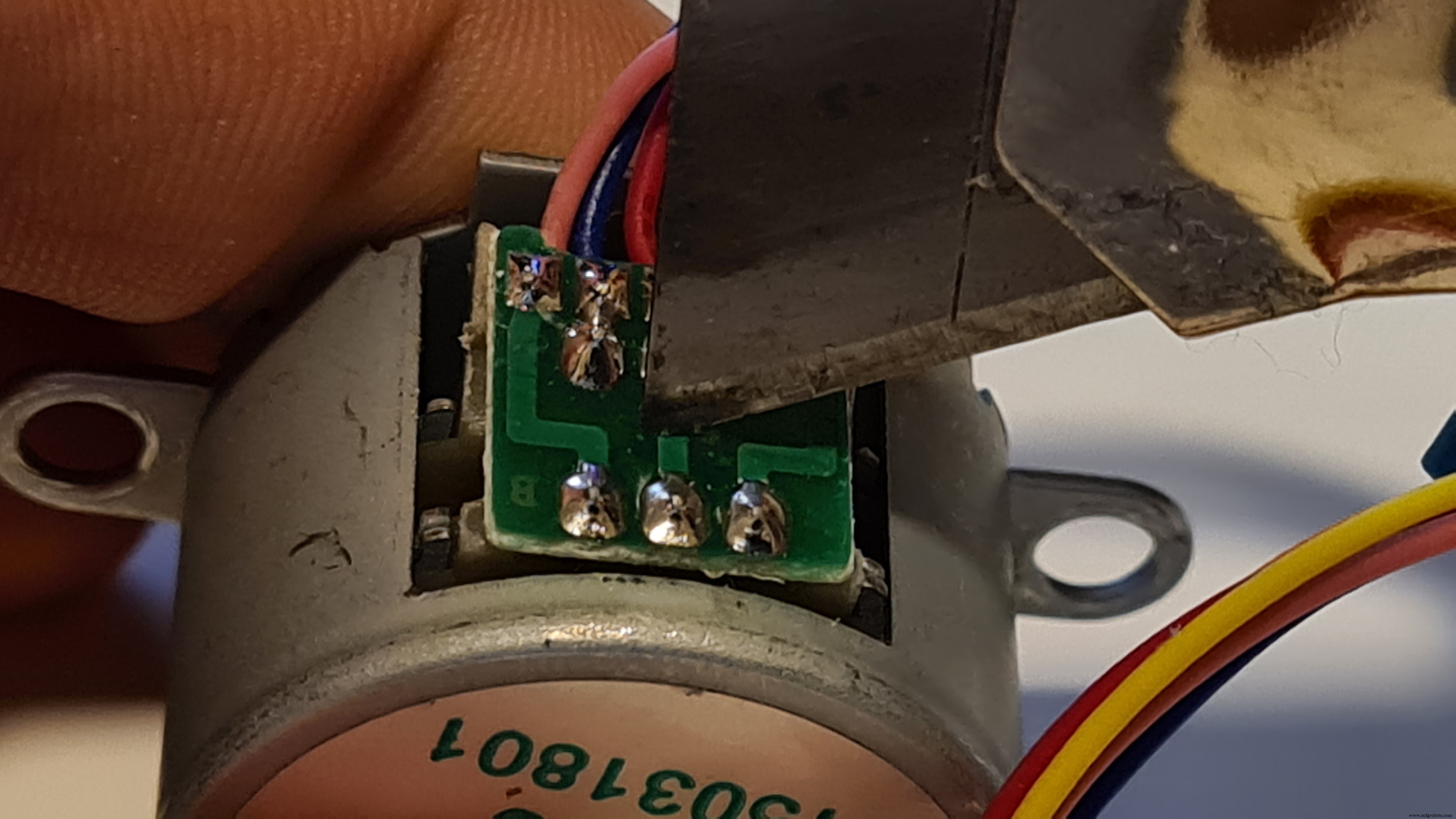
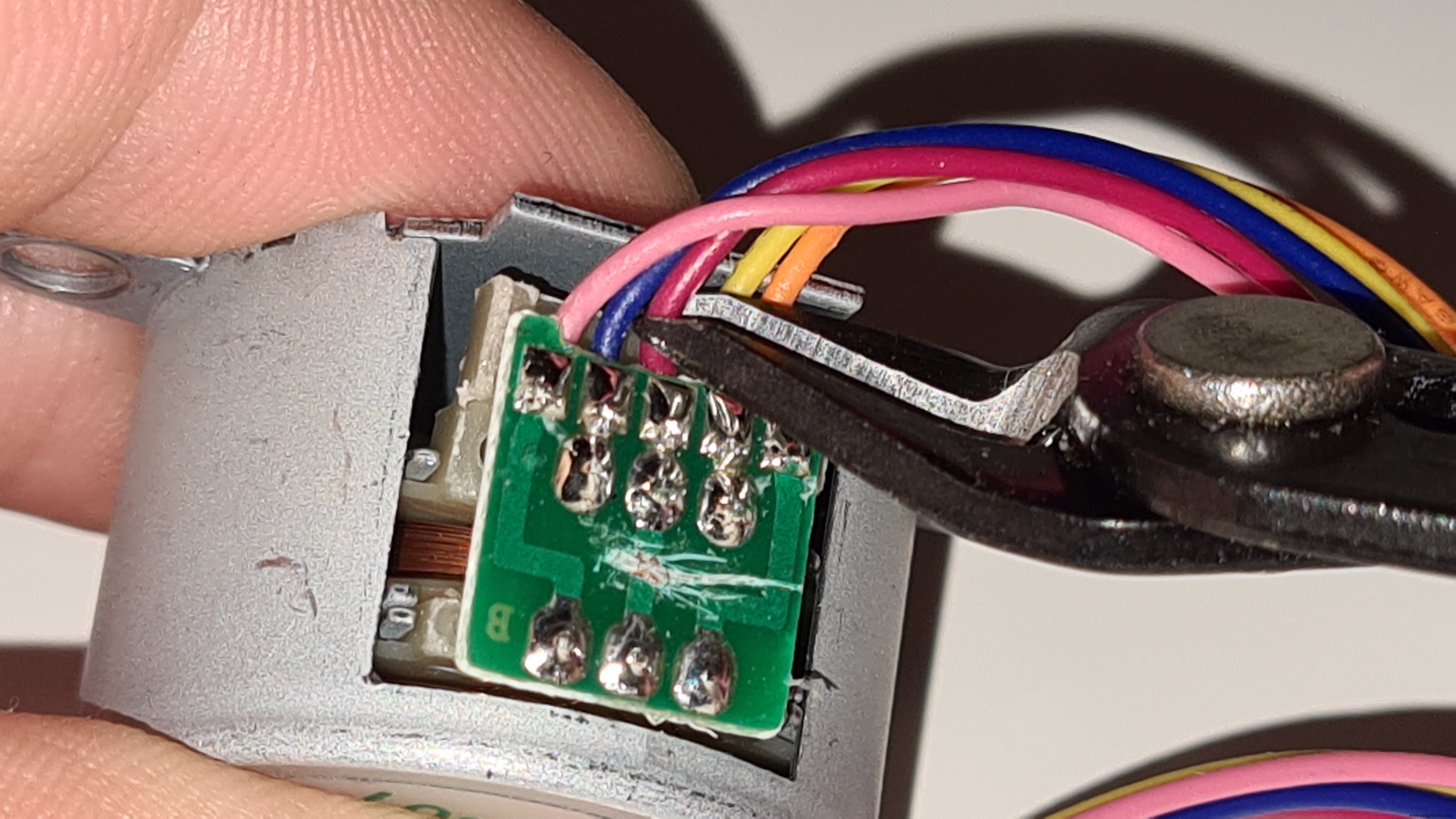
Setelah dilepas, Anda ingin memotong sepenuhnya jejak tengah yang naik ke kabel merah menggunakan pisau.
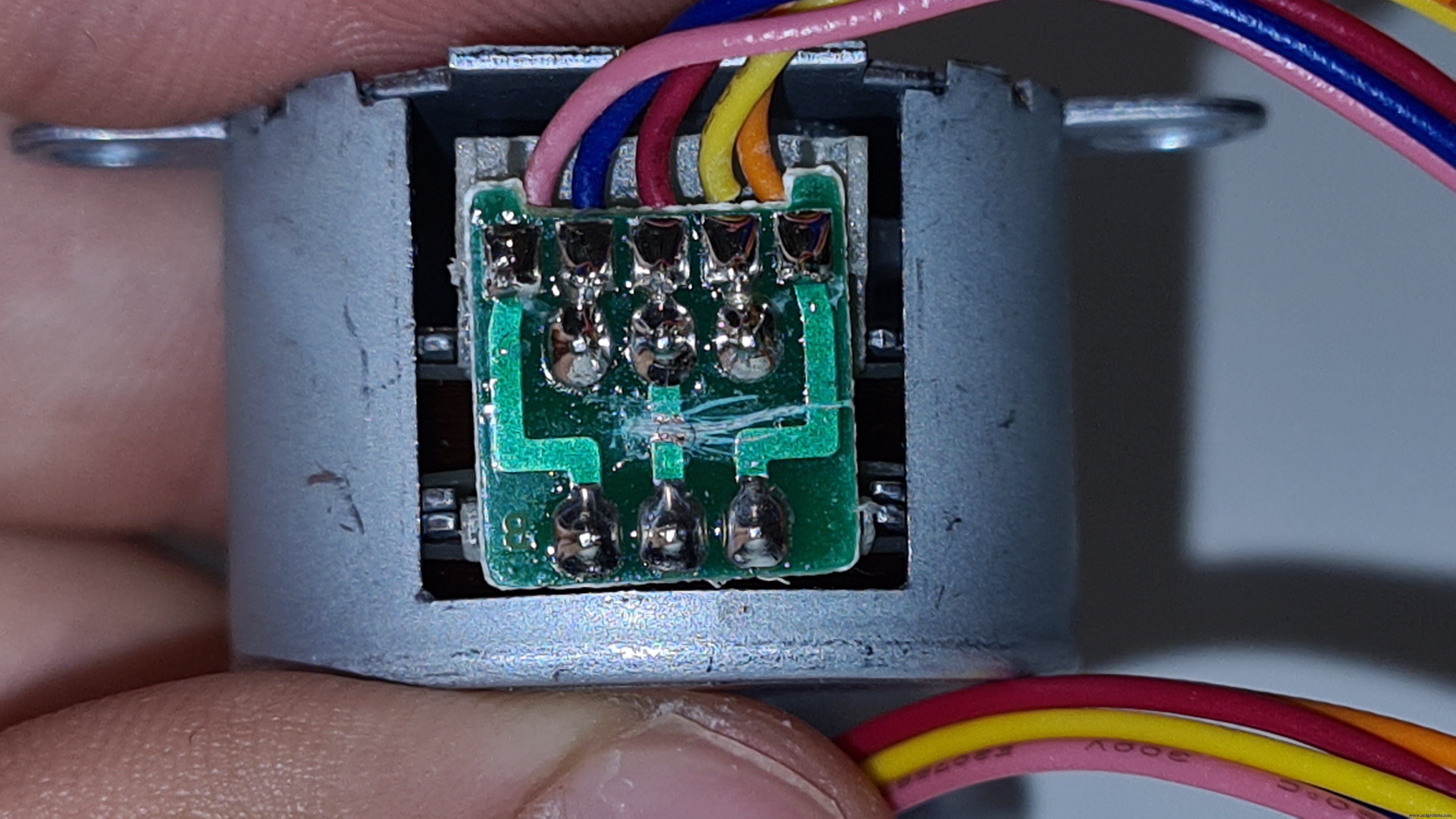
Anda ingin memastikan bahwa itu tidak terhubung sama sekali lagi.
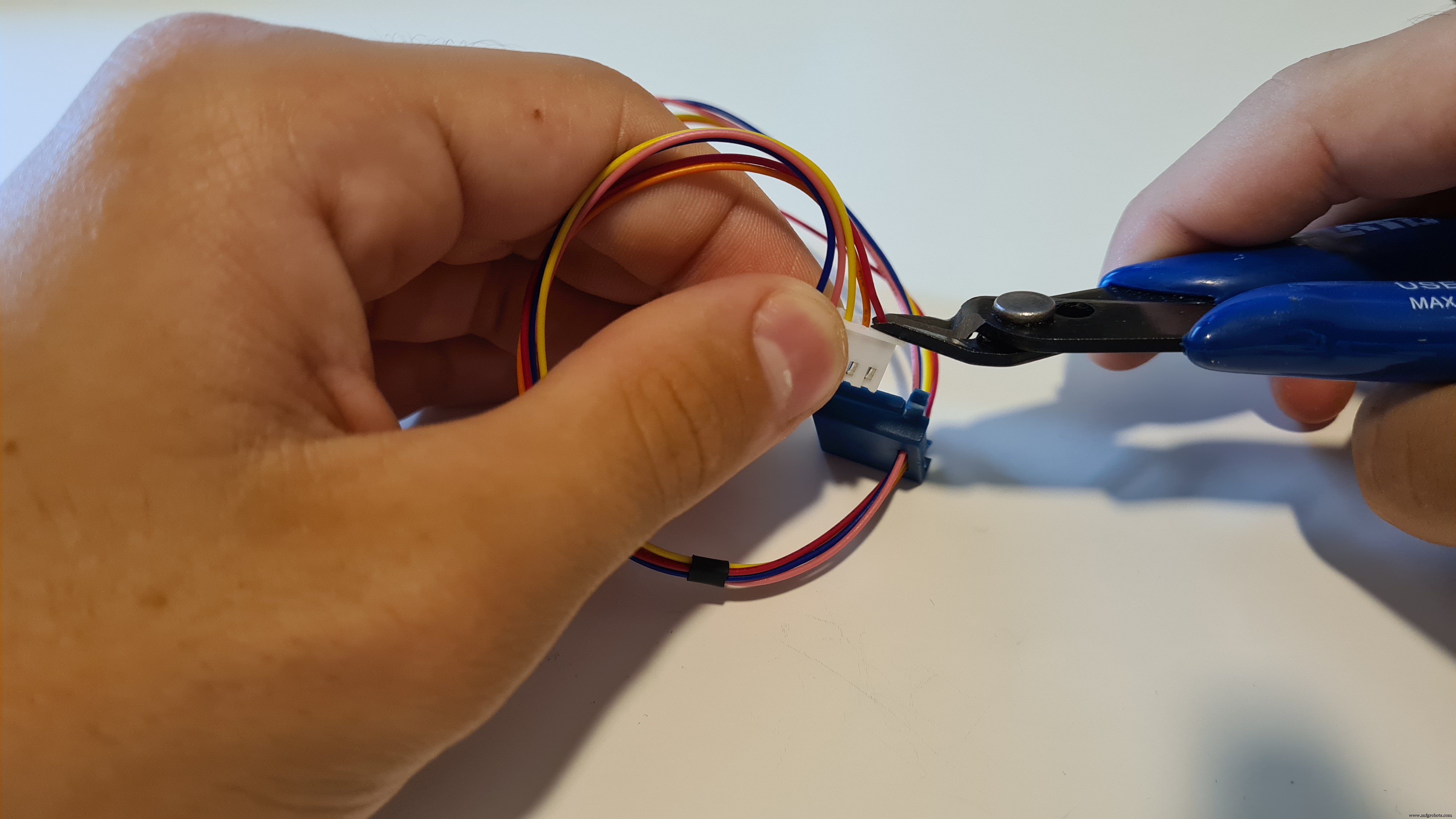
Sekarang Anda dapat memotong kabel merah dari kedua sisi.
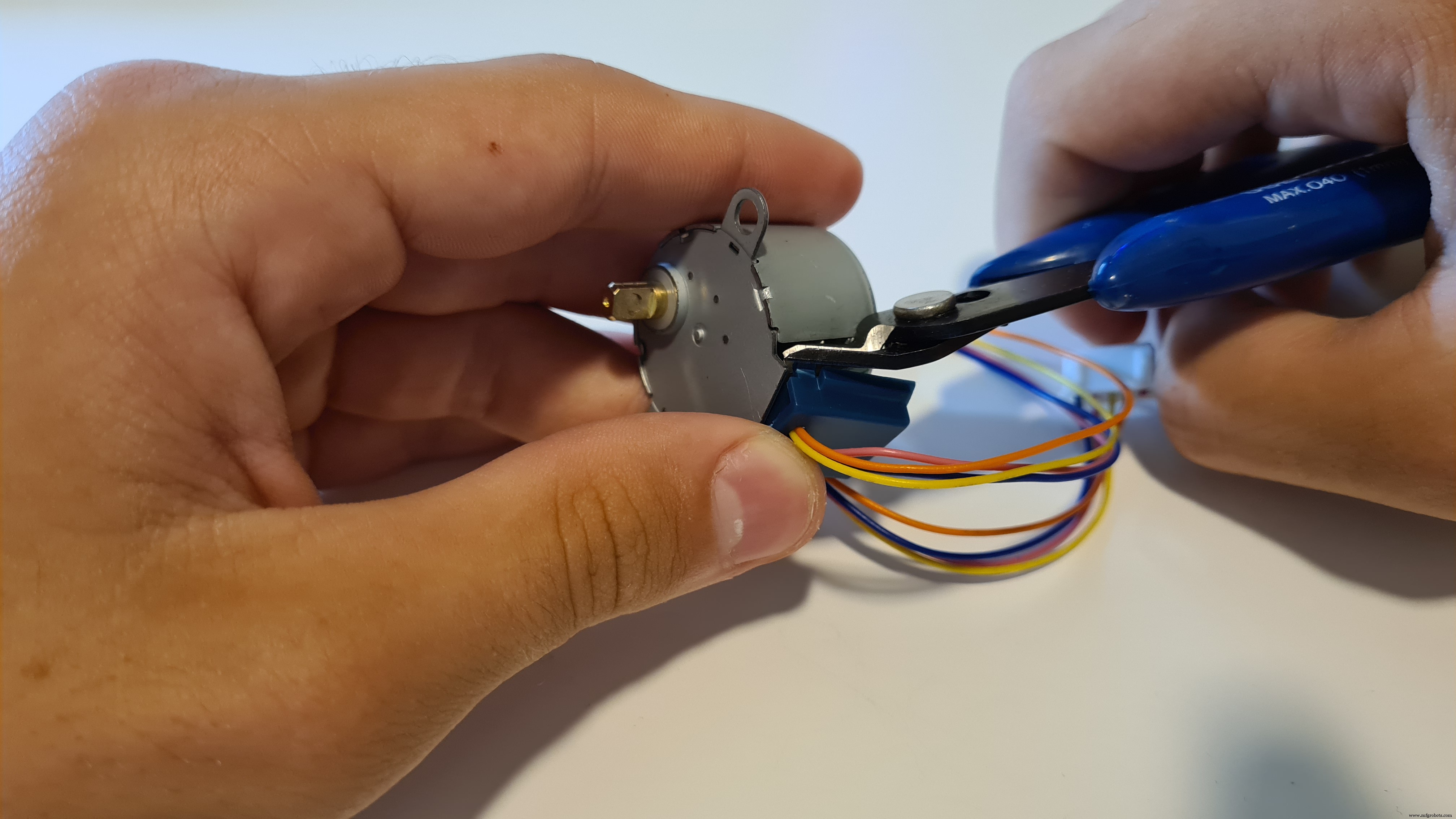
Anda dapat memasang kembali penutup biru sekarang. Saya perlu memotong 2 penyangganya untuk dapat memasangnya kembali.
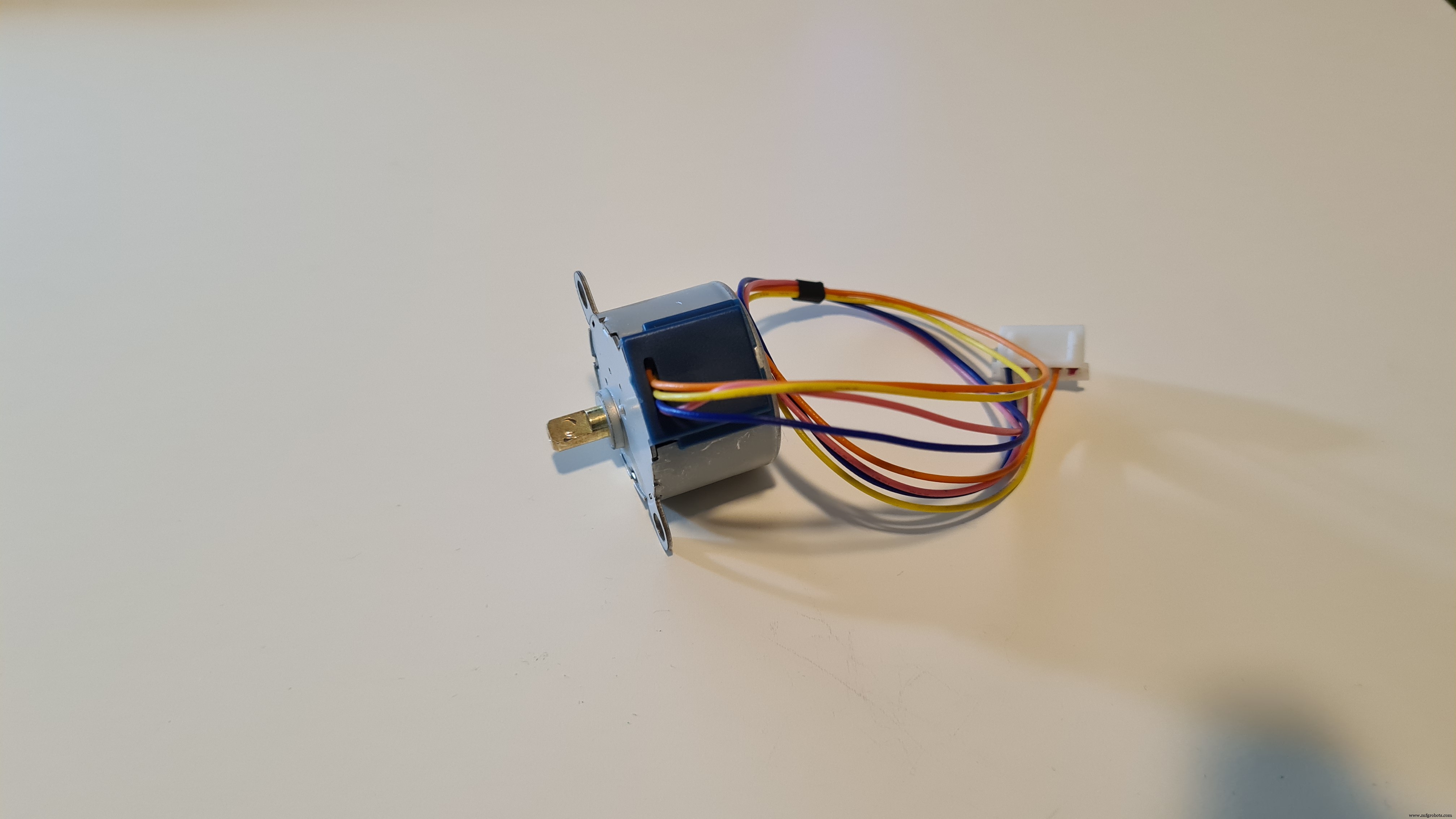
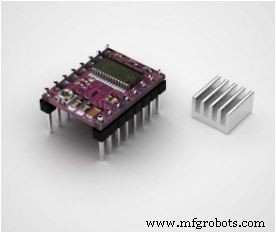
Sekarang Anda memiliki stepper 28BYJ-48 bipolar Anda sendiri. Ini memiliki sekitar 2,5 kali torsi awal. Namun sekarang Anda perlu mendapatkan driver stepper bipolar seperti DRV8825 yang saya gunakan. Pasokan tegangan minimum untuk pengemudi diberi peringkat 8.4V dan motor kami diberi peringkat 5V. Tapi jangan khawatir motor versi bipolar dapat dengan mudah menangani tegangan itu!
Langkah 7:Ikatan Velcro DIY x2

Saatnya membuat ikatan Velcro yang akan merekatkan aksesori ke dispenser. Jika Anda sudah memiliki beberapa pengikat kabel Velcro, jangan ragu untuk menggunakannya.

Anda dapat membuatnya sepanjang atau sesingkat yang Anda inginkan, tetapi saya sarankan untuk memotong satu bagian dengan panjang 30cm - 40cm dan yang lainnya pada 4cm - 7cm.

Sekarang Anda ingin menjepit kedua bagian menjadi satu. Pastikan sisi yang akan dijepit keduanya kasar atau lunak.
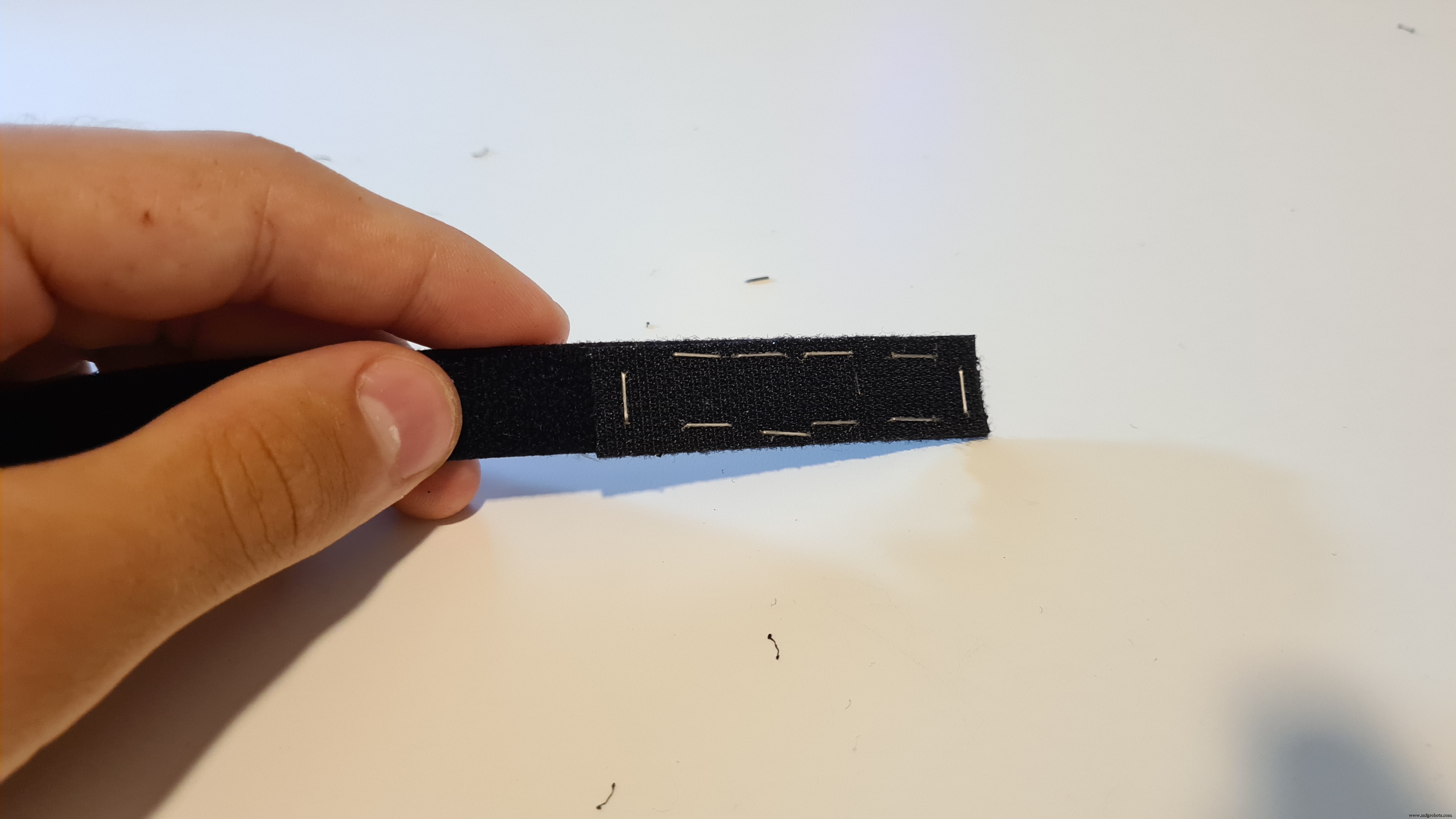
Sekarang dasi Velcro Anda siap digunakan!


Anda akan membutuhkan dua ini.
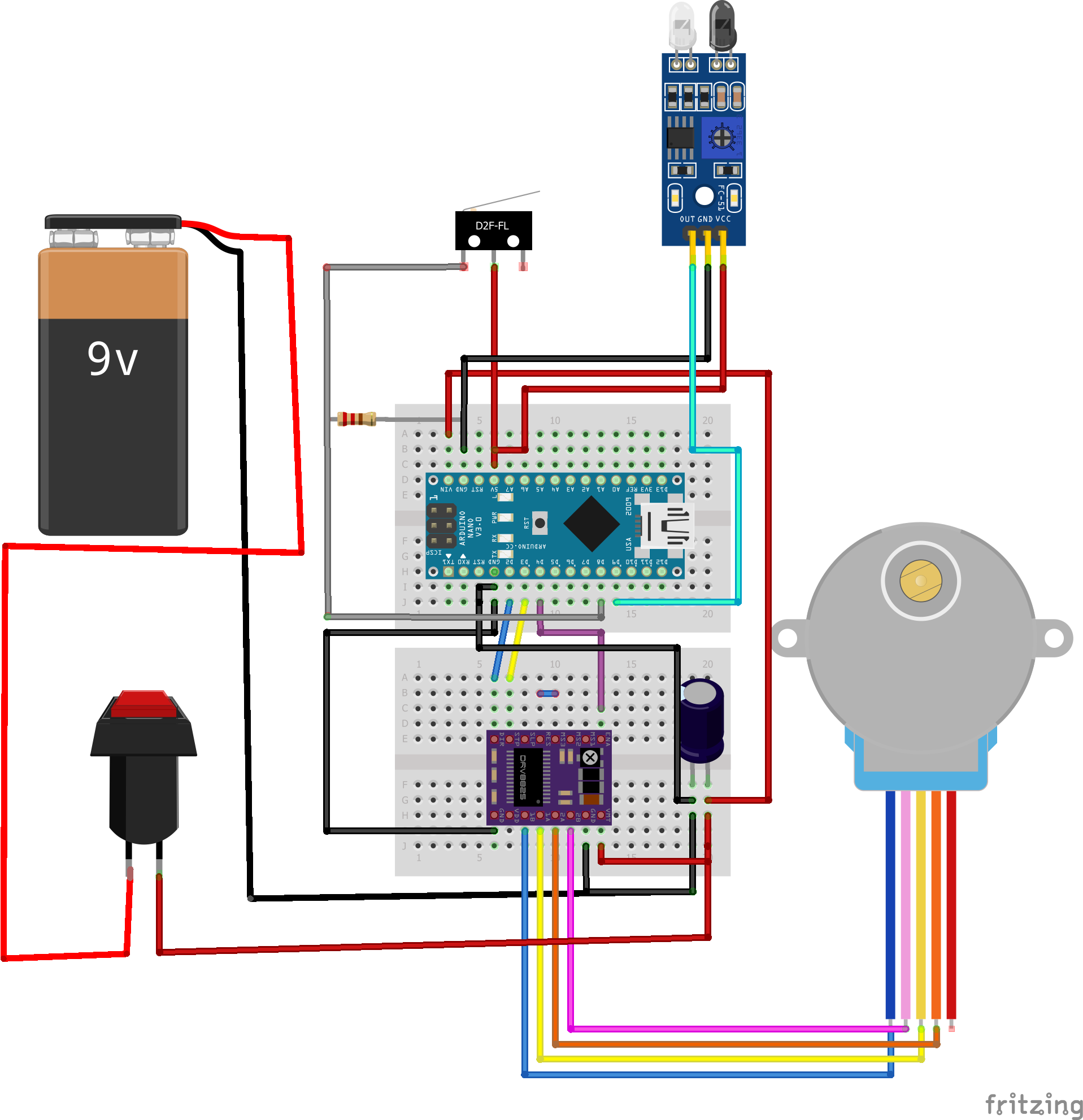
Langkah 8:Sirkuit
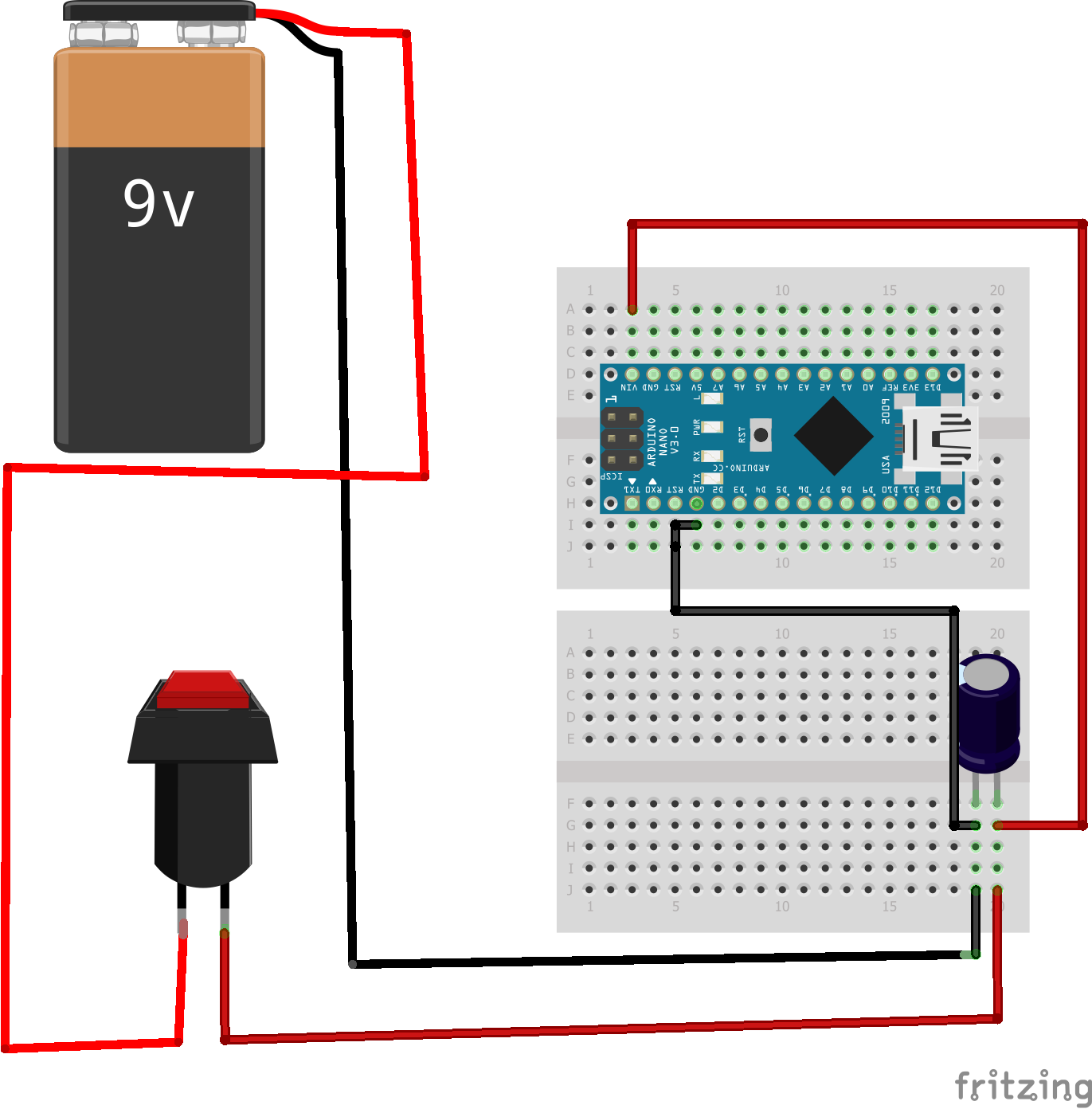
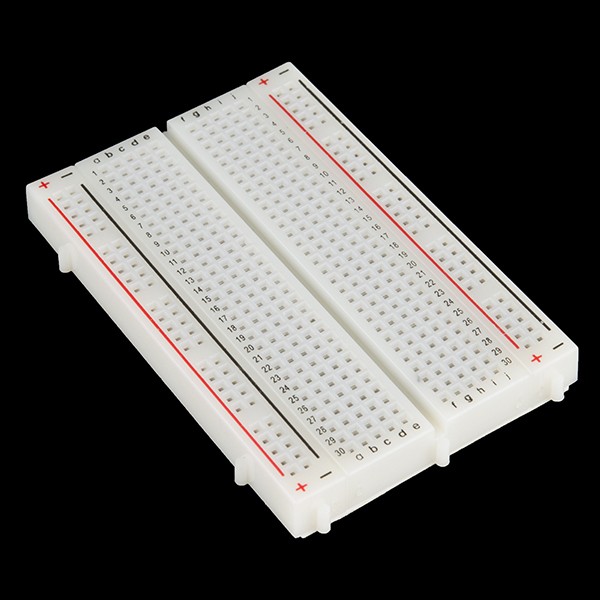
Saatnya membuat sirkuit elektronik! Sebagai permulaan, sambungkan Ground baterai 9V ke Arduino Ground dengan kapasitor elektrolitik 100μF di antaranya (Ingat sisi kapasitor dengan garis putih adalah ground/katoda). Hubungkan 9V ke sakelar On-Off generik dan kemudian ke Vin pada anoda kapasitor. Saya menggunakan dua papan tempat memotong roti mini karena cocok di dalam casing, gunakan papan tempat memotong roti yang Anda suka tetapi pertimbangkan ruang yang terbatas.
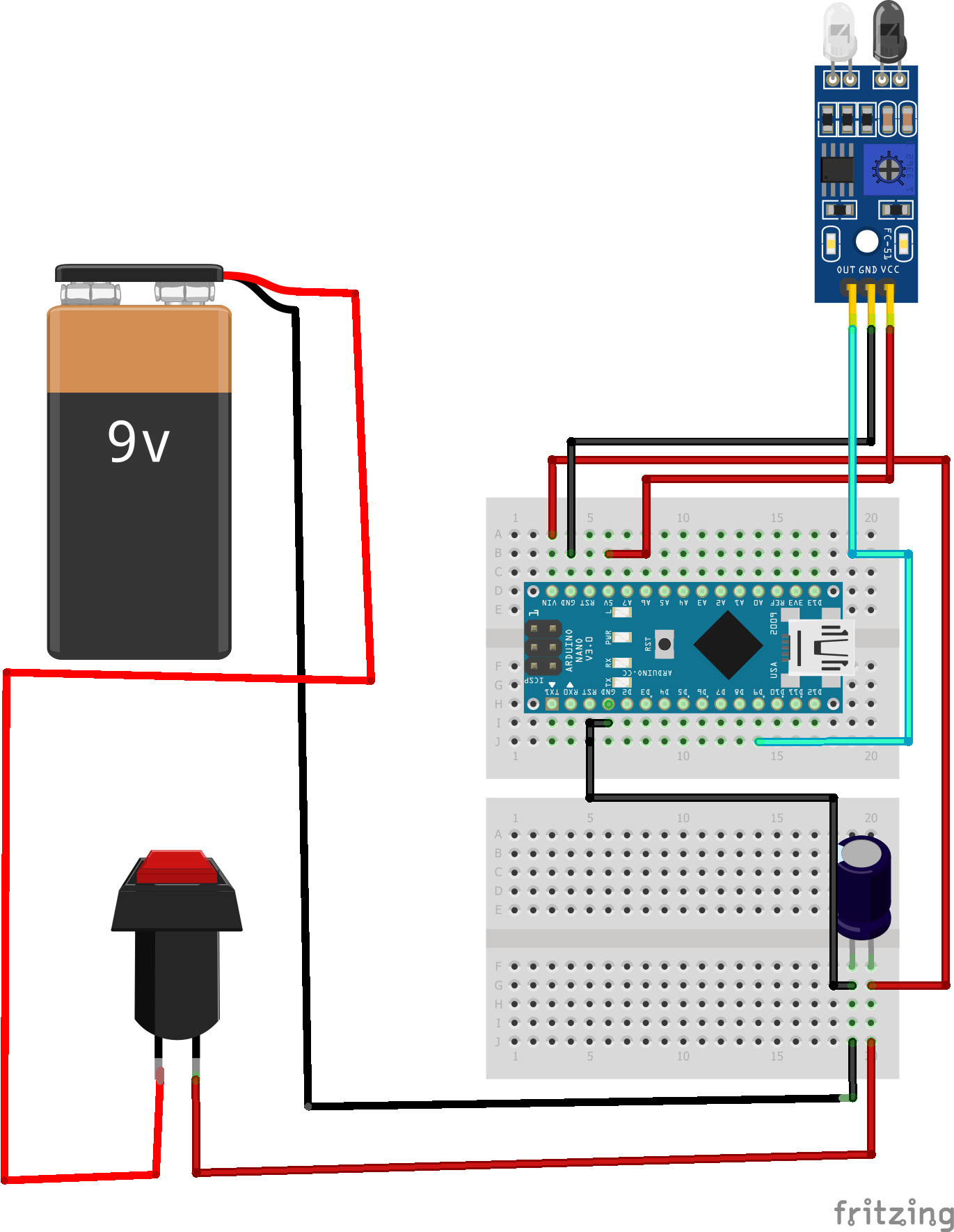
Hubungkan VCC Sensor Rintangan IR ke 5V, Ground ke Ground dan terakhir OUT ke pin Digital 9.

Sekarang kita akan menghubungkan saklar end-stop. Hubungkan kaki umum ke 5V dan biasanya terbuka ke Digital pin 8 dan ke Ground melalui resistor 1kΩ.
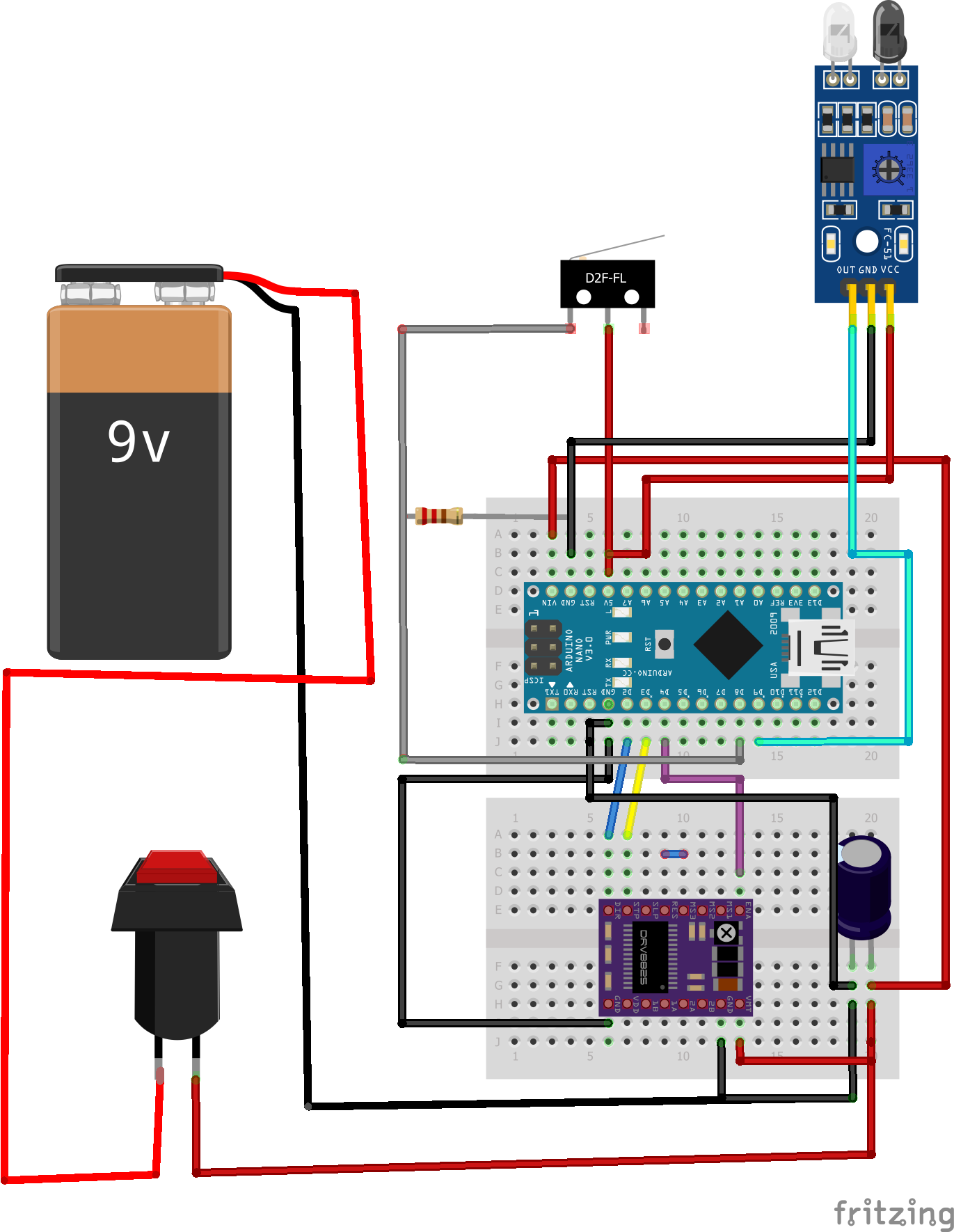
Tambahkan driver motor bipolar DRV8825 ke papan tempat memotong roti. Hubungkan Vmot ke Vin Arduino. Hubungkan dua Grounds ke Ground. Hubungkan Dir pin ke Digital pin 2, Step pin ke Digital pin 3, Enable pin to Digital pin 4. Hubungkan Reset dan Sleep pin satu sama lain.
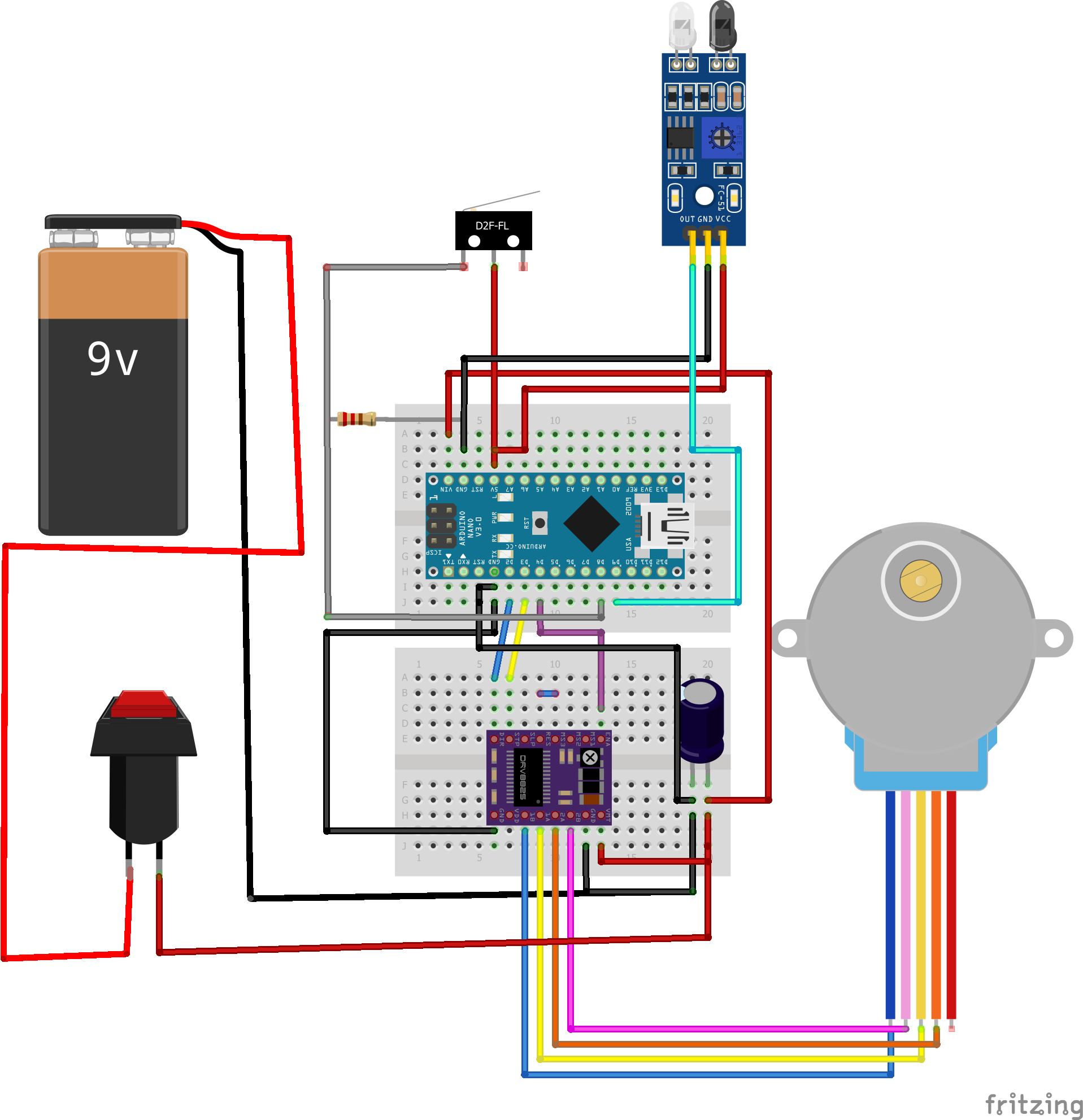
Terakhir sambungkan kabel biru 28BYJ-48 ke A2, kabel kuning ke A1, kabel oranye ke B1 dan kabel merah muda ke B2.
Elektronik akhirnya terhubung!
Langkah 9:Pemrograman
const int dirPin =2; Kami mendefinisikan pin Dir driver sebagai pin Digital 2.
const int stepPin =3; Kami mendefinisikan Step pin driver sebagai Digital pin 3.
const int enablePin =4; Kami mendefinisikan pin Aktifkan driver sebagai pin Digital 4.
const int langkahPerRevolution =6000; Kami mendefinisikan jumlah langkah per putaran sebagai 6000, satu putaran 360 derajat adalah 2048 langkah.
int endStop =8; Kami mendefinisikan pin input sakelar endStop sebagai pin Digital 8.
int irSensor =9; Kami mendefinisikan pin input dari sensor penghalang IR sebagai pin Digital 9.
pengaturan batal()
{
pinMode(endStop, INPUT);
pinMode(irSensor,INPUT); Dalam penyiapan, kami mendeklarasikan pin endStop dan irSensor sebagai Input.
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enablePin, OUTPUT); Kami mendeklarasikan stepPin, dirPin dan enablePin sebagai Output.
digitalWrite(enablePin, LOW); Kami menyetel enablePin LOW untuk mengaktifkan driver DRV8825
sementara(digitalRead(endStop) ==RENDAH)
{ Selama nilai digital sakelar endStop RENDAH (Saklar tidak ditekan.)
digitalWrite(dirPin, HIGH); arah putaran motor diatur berlawanan arah jarum jam
untuk(int x =0; x <1; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, RENDAH);
delayMicroseconds(2000);
} dan stepper akan berputar berlawanan arah jarum jam satu langkah pada satu waktu sampai kondisi pernyataan While salah.
digitalWrite(enablePin, HIGH);
} Ini menonaktifkan driver kami sehingga saat tidak digunakan driver tidak mengkonsumsi banyak arus.
void loop()
{
if(digitalRead(irSensor)==0)
{ Di loop jika nilai digital irSensor adalah 0 (ada halangan (tangan) di depan sensor IR Obstacle)
digitalWrite(enablePin, LOW); Pengemudi diaktifkan.
digitalWrite(dirPin, LOW); Arah putaran motor diatur searah jarum jam.
untuk(int x =0; x
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, RENDAH);
delayMicroseconds(2000);
} Stepper akan berputar searah jarum jam selama 6000 langkah.
delay(2000); Ini akan menunggu selama 2 detik.
sementara(digitalRead(endStop) ==RENDAH)
{ Selama nilai digital sakelar endStop LOW (Saklar tidak ditekan.
digitalWrite(dirPin, HIGH); arah putaran motor diatur berlawanan arah jarum jam.
untuk(int x =0; x <1; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, RENDAH);
delayMicroseconds(2000);
}
} dan stepper akan berputar berlawanan arah jarum jam satu langkah pada satu waktu sampai kondisi pernyataan While salah.
digitalWrite(enablePin, HIGH);
}
} Kemudian driver akan dinonaktifkan hingga kondisi pernyataan If benar dan kode diputar kembali.
Langkah 10:Perakitan
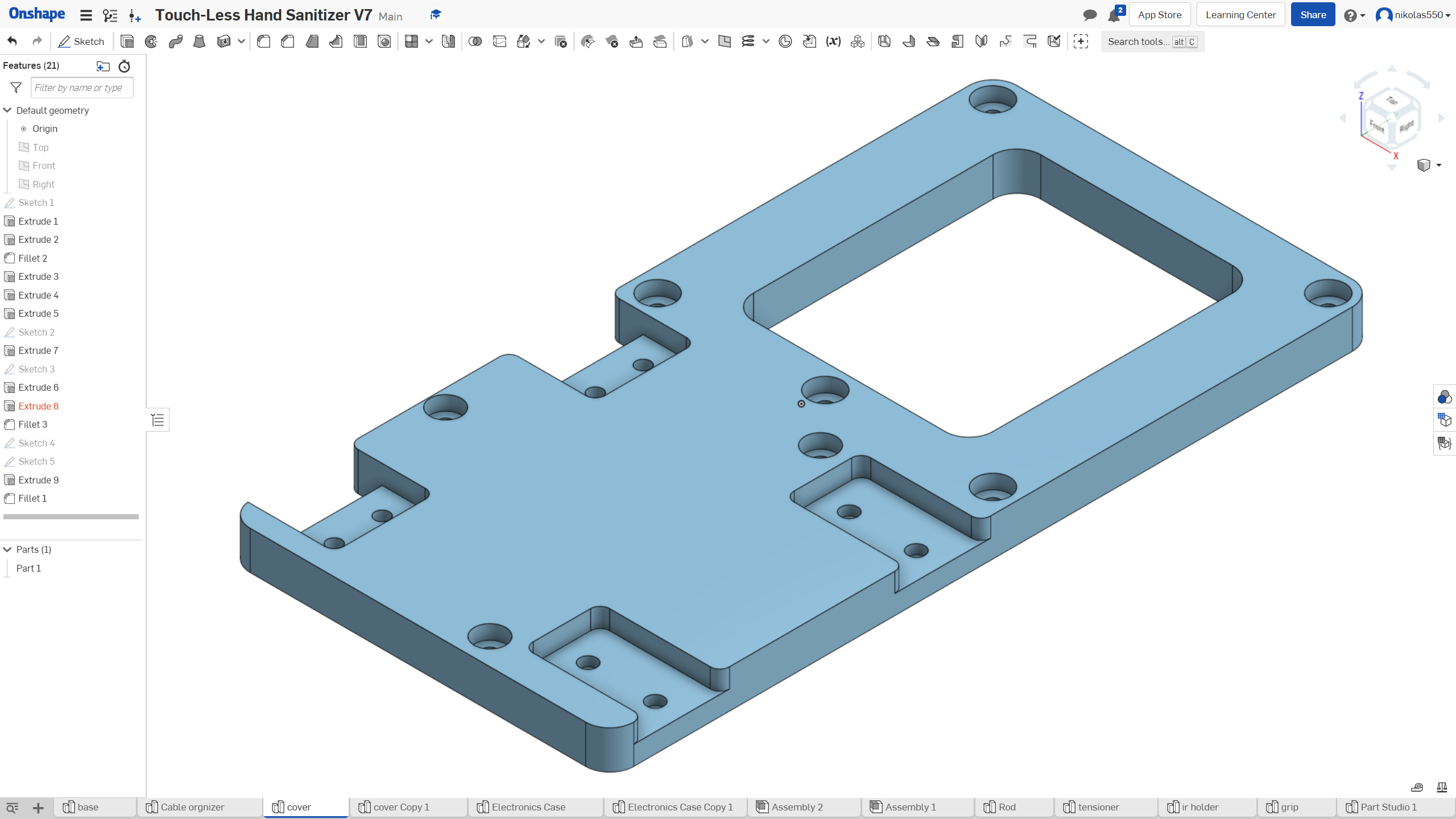
Rakitan Penutup


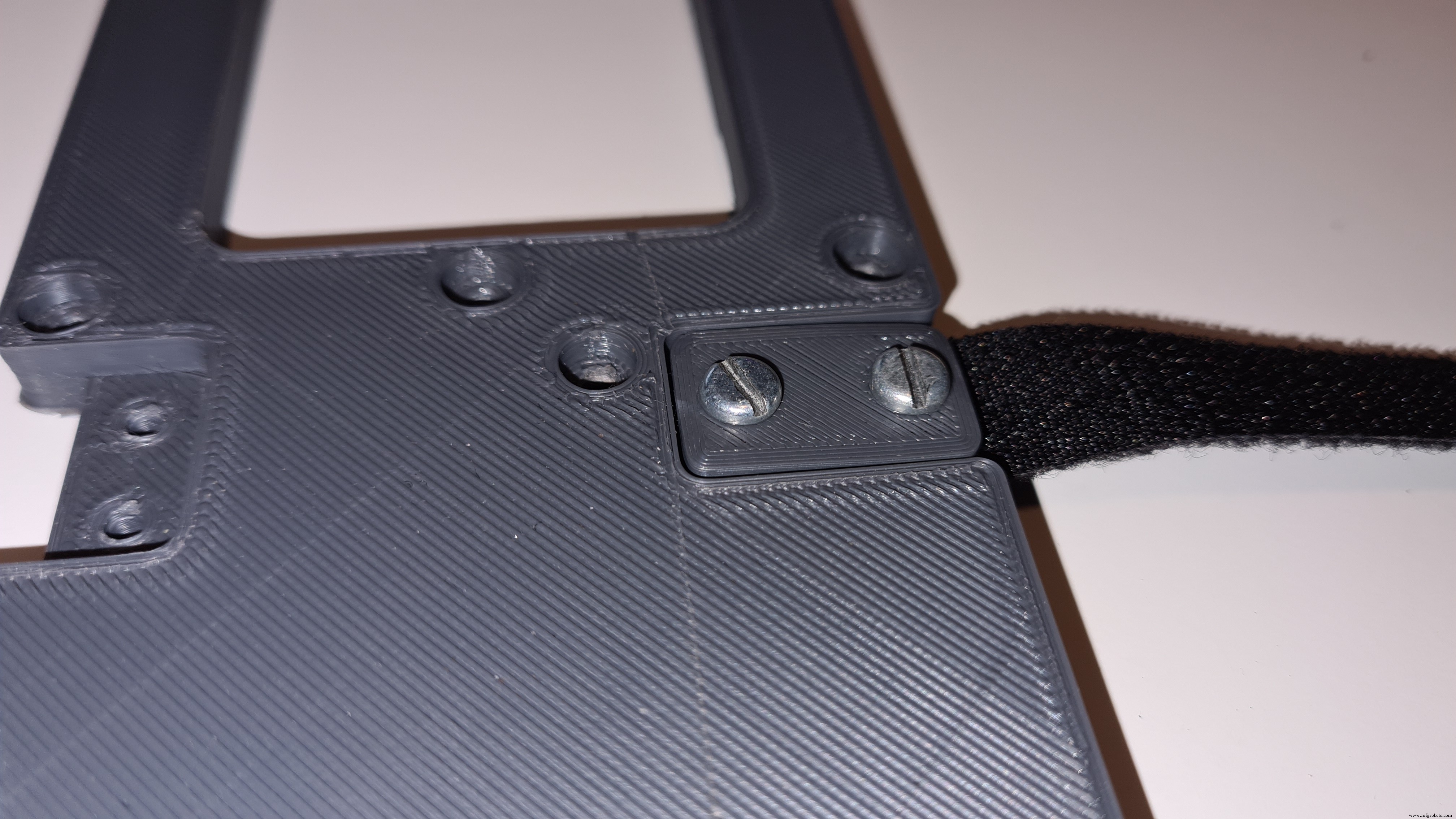

Cukup tempatkan dasi Velcro di celahnya, tambahkan dudukan di atasnya dan kencangkan.
x2


Pasang pegangan Velcro ke penutup. Perakitan penutup sekarang selesai!
x2
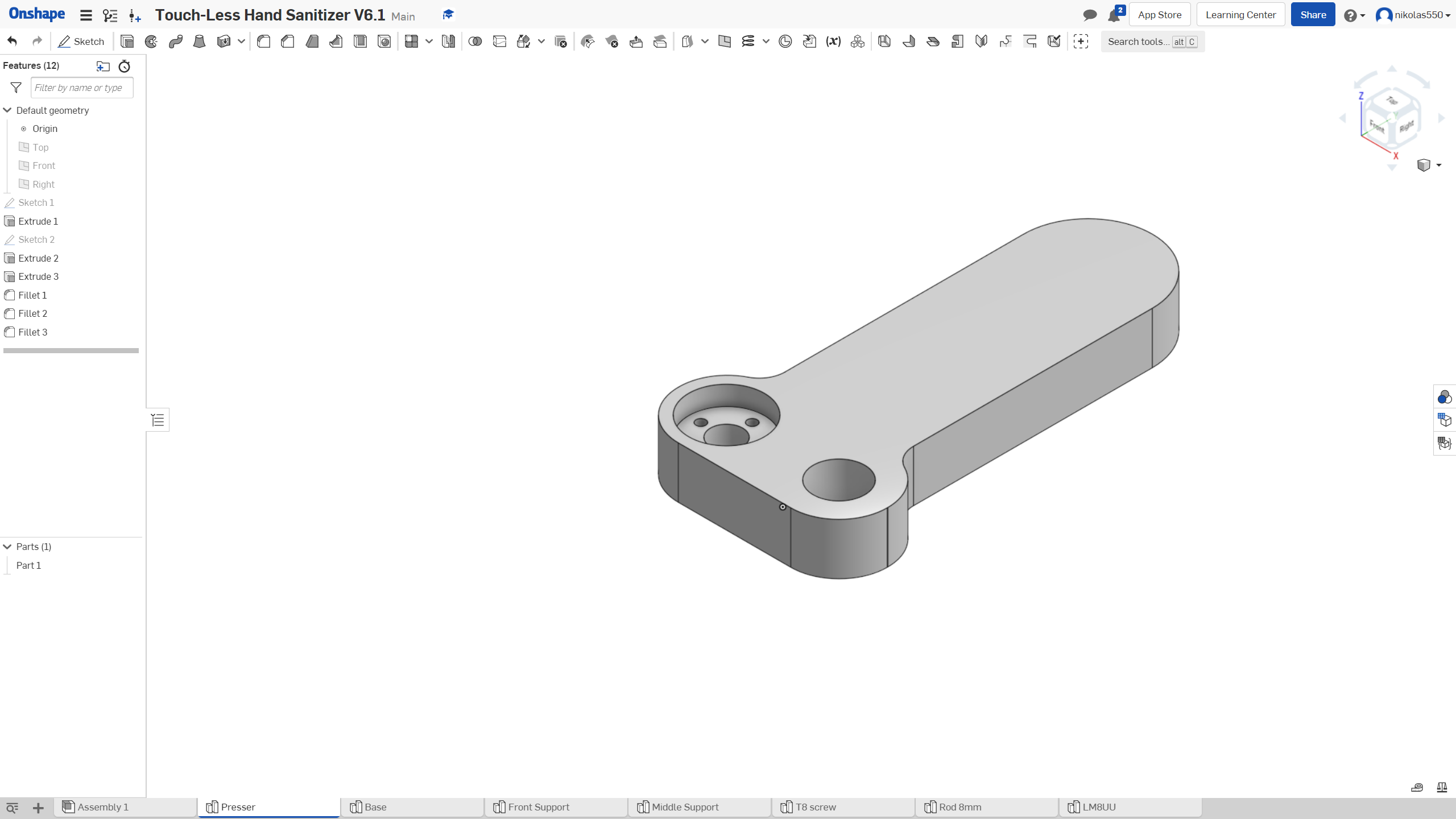
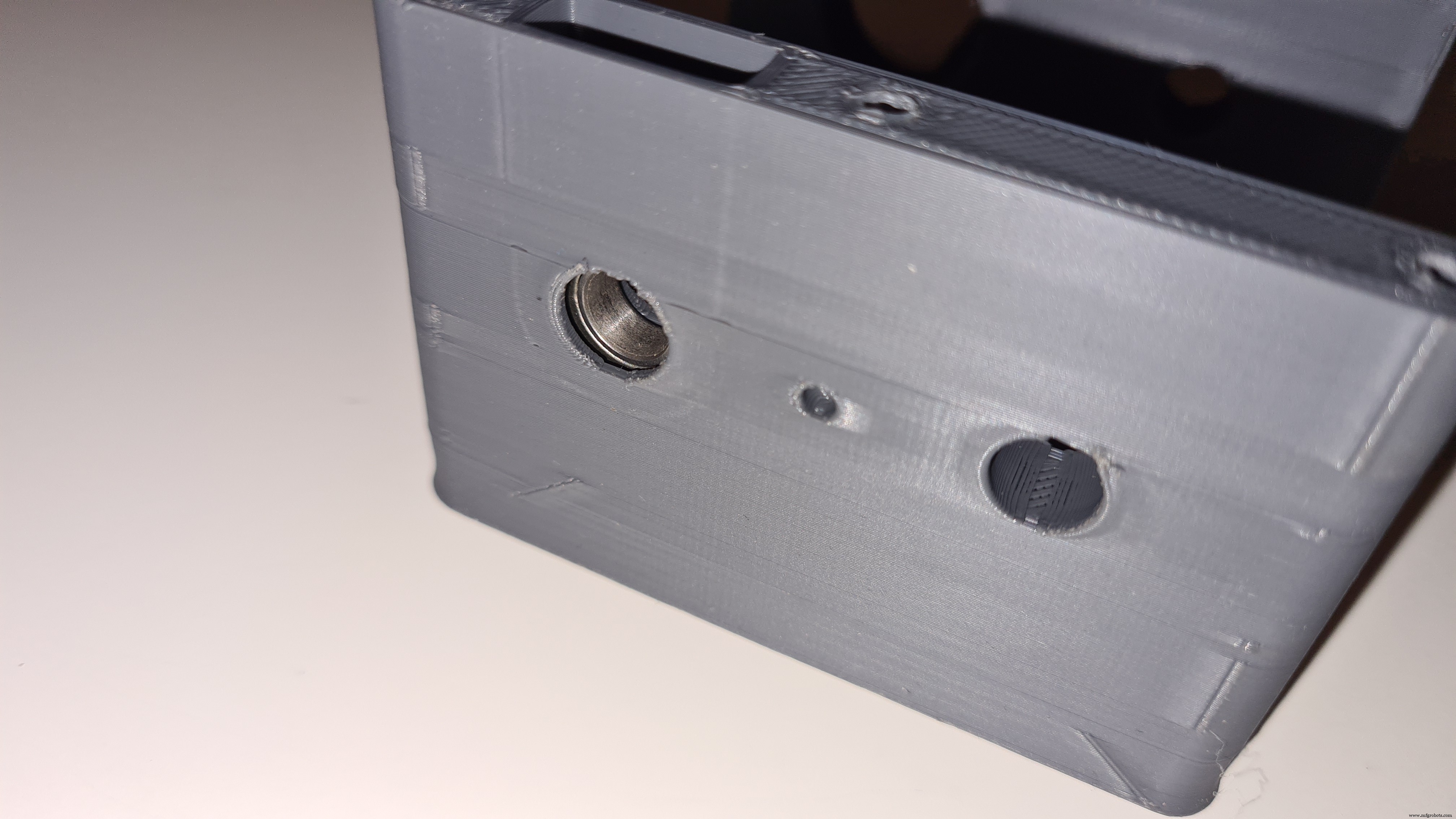
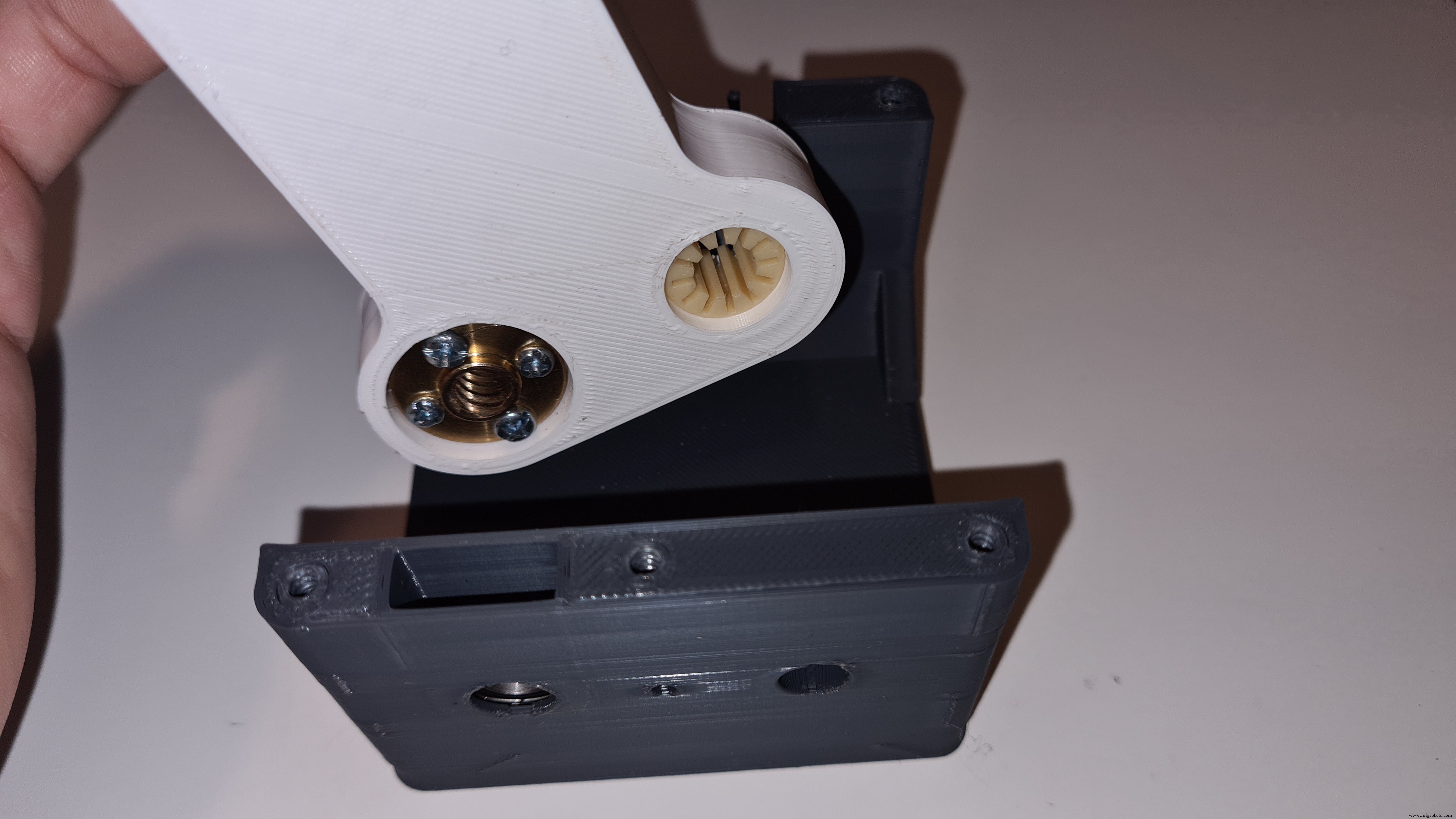
Rakitan Presser

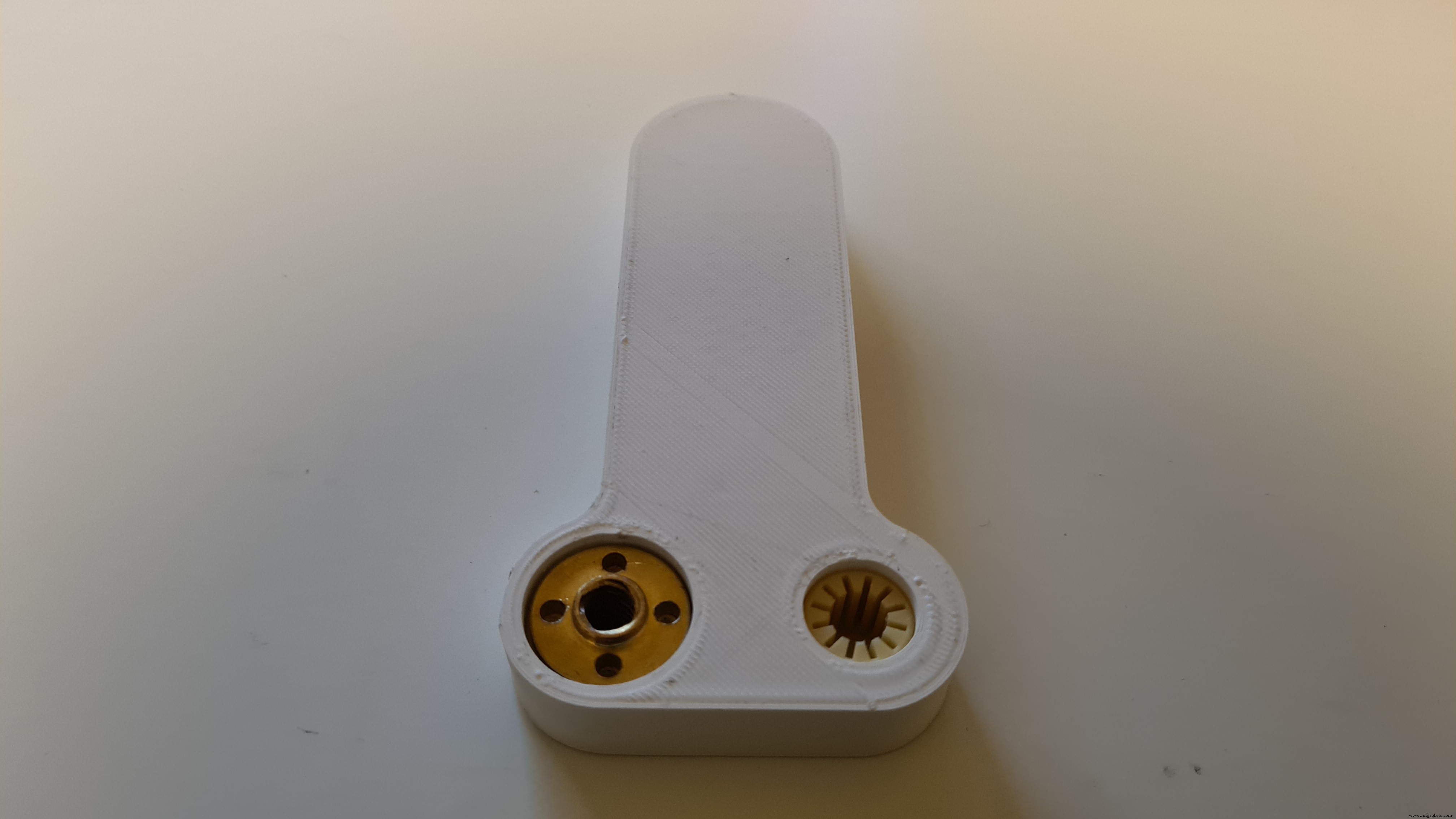

Dorong bantalan linier di lubang kanan sampai berada di tengah. Pasang mur T8 ke lubang kiri penekan dengan 4 sekrup.
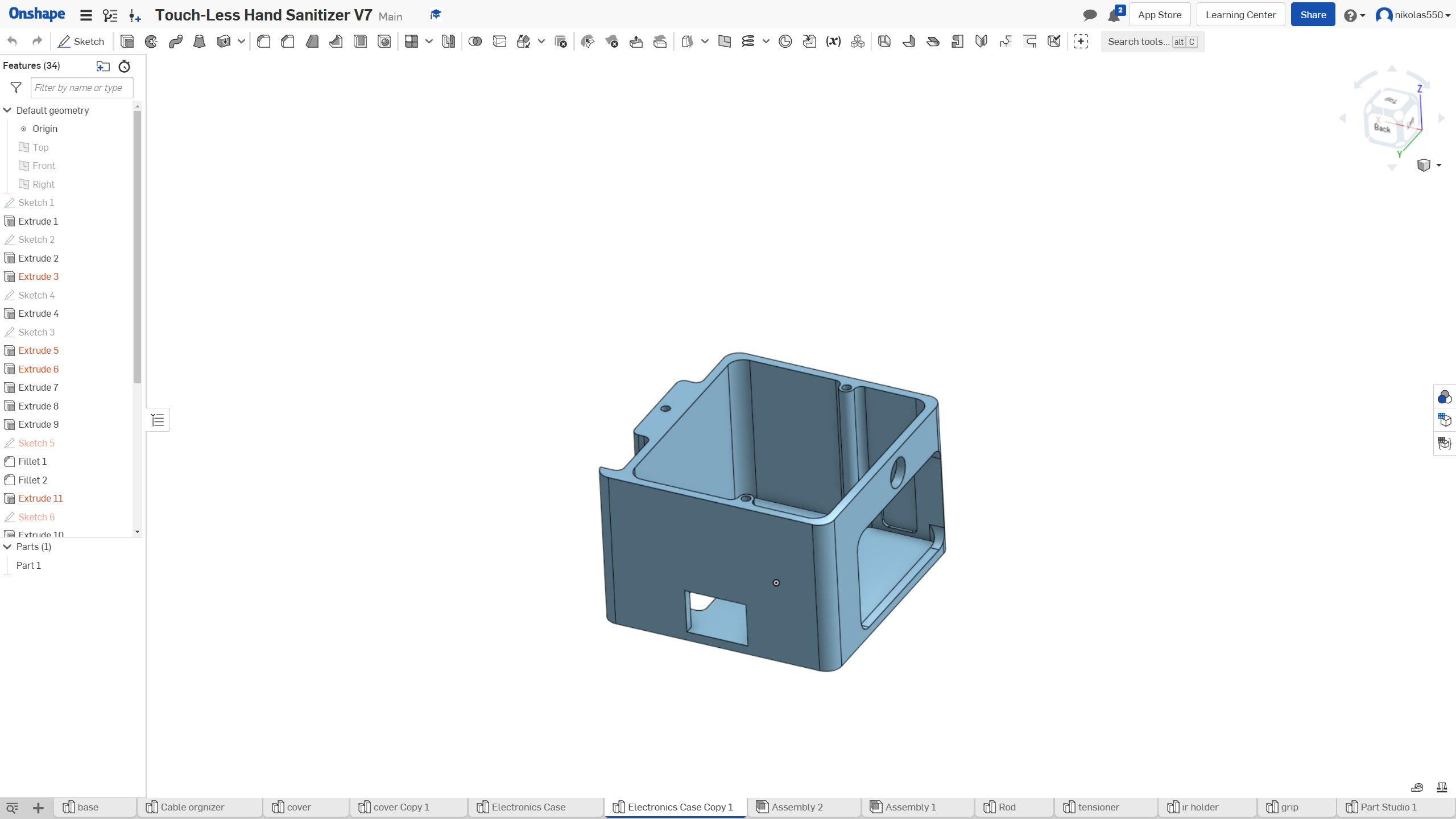
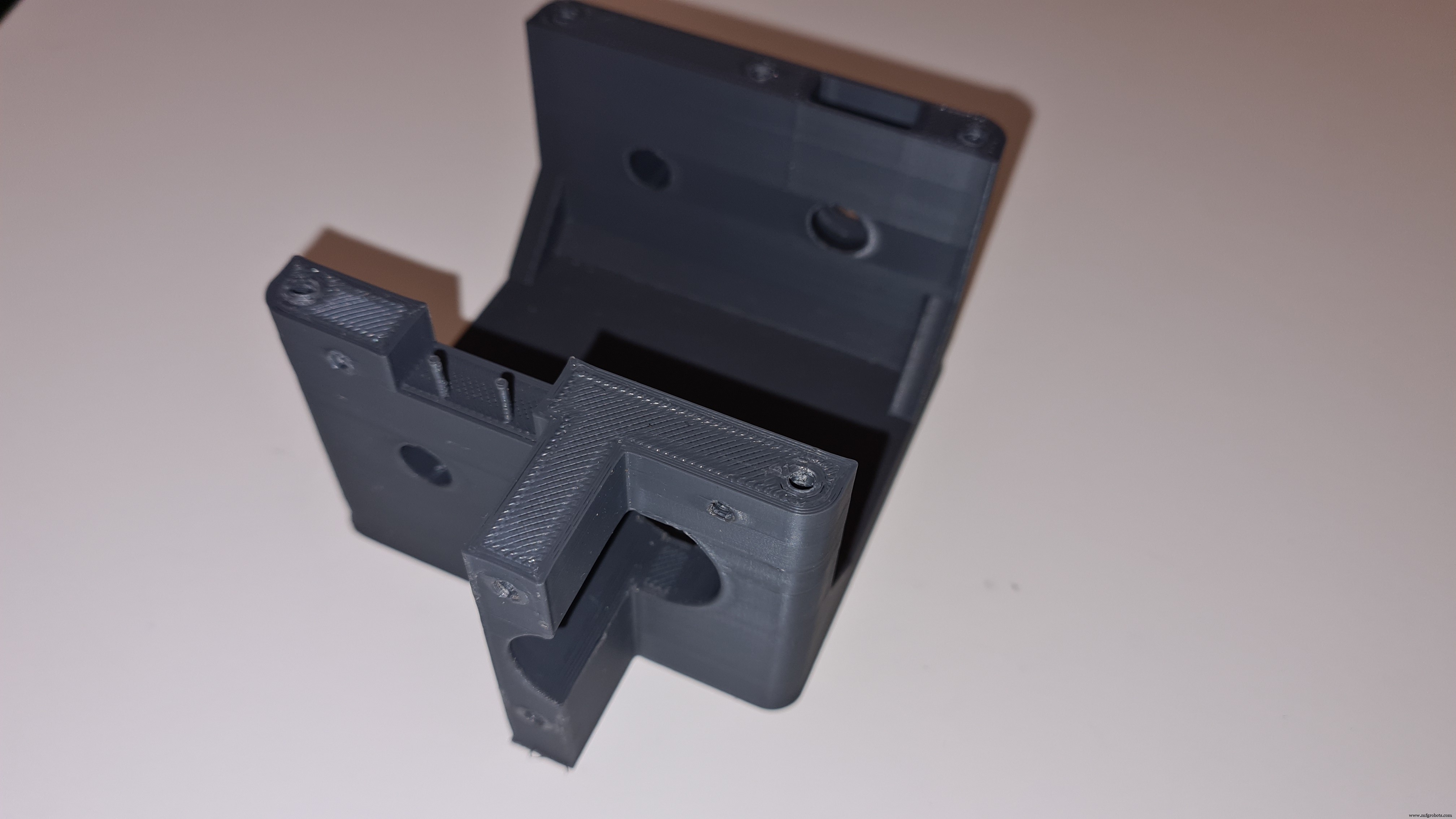
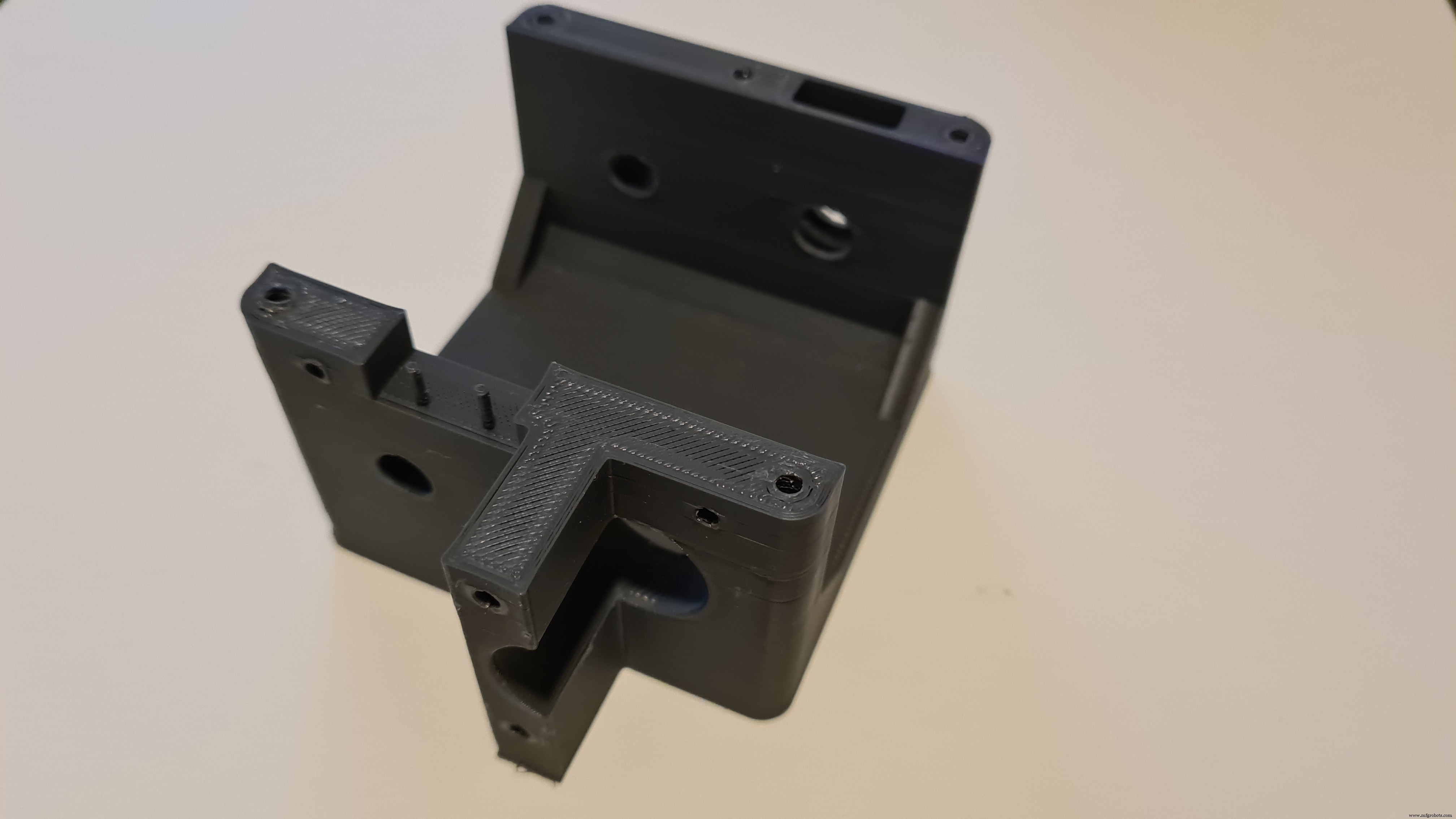
Perakitan Kotak Elektronik
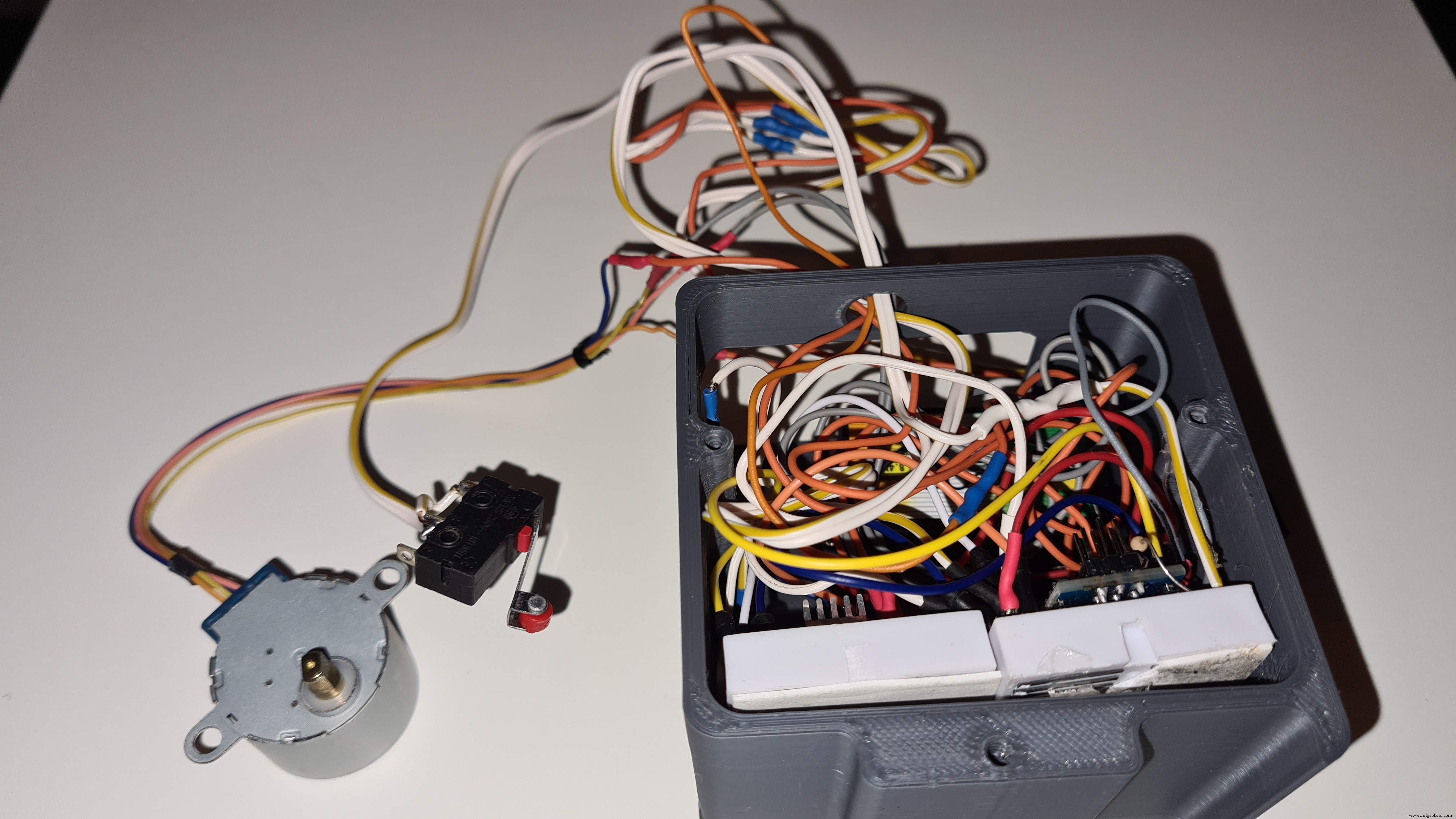
Masukkan sirkuit Anda ke dalam kotak elektronik. Jalankan kabel stepper, sakelar, dan sensor Penghalang IR melalui lubang.
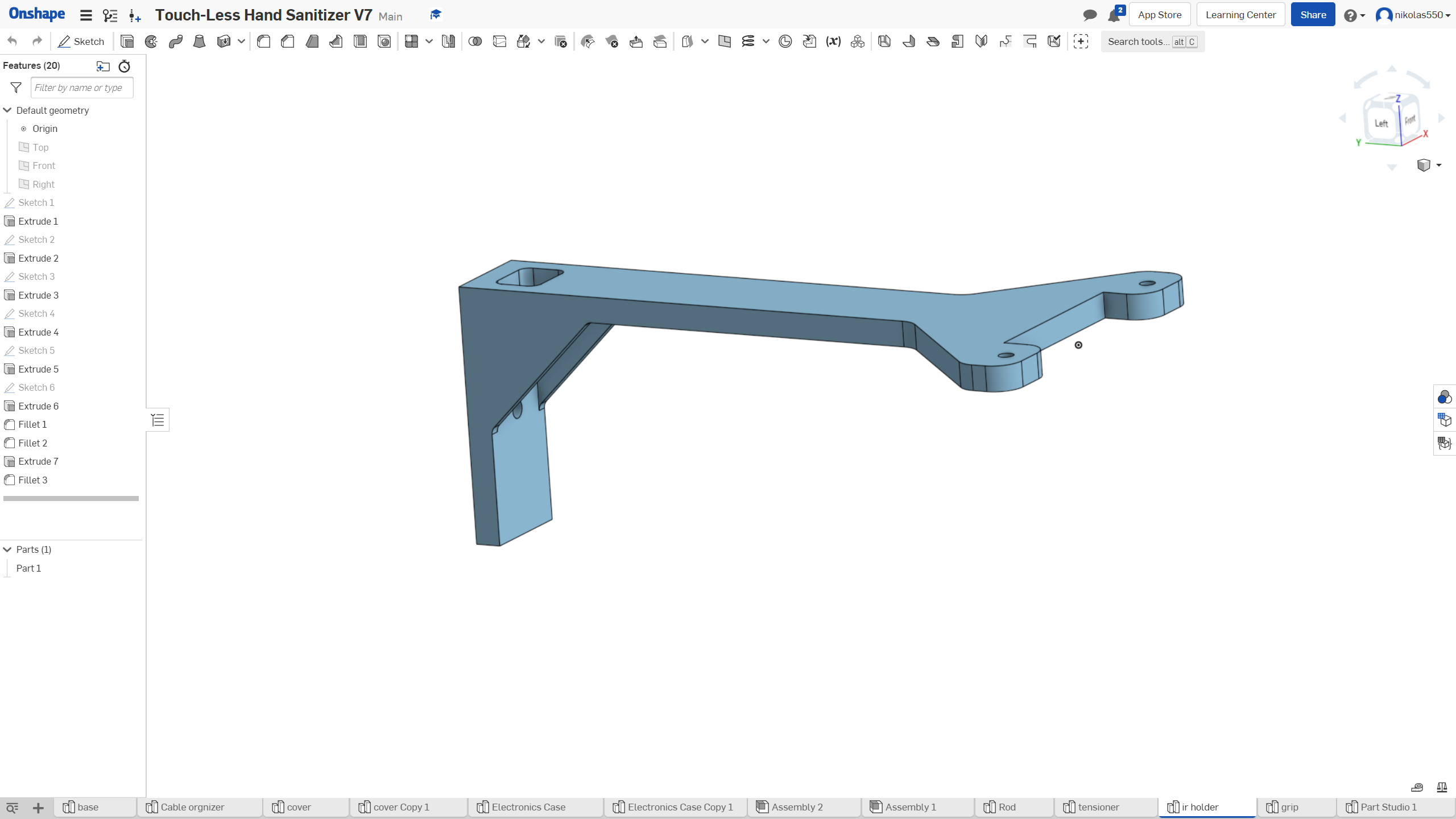
Rakitan Dudukan Sensor Rintangan IR
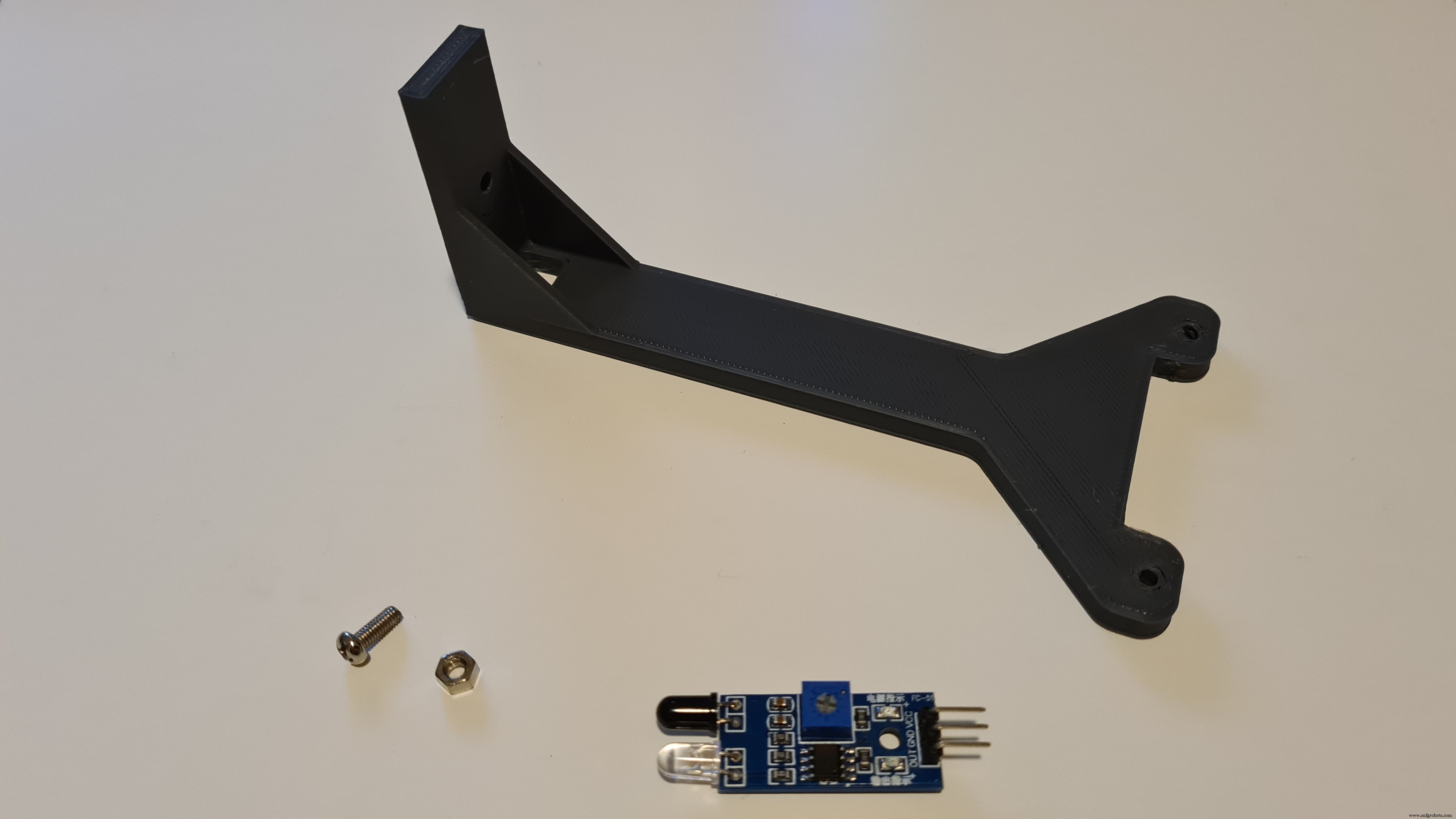
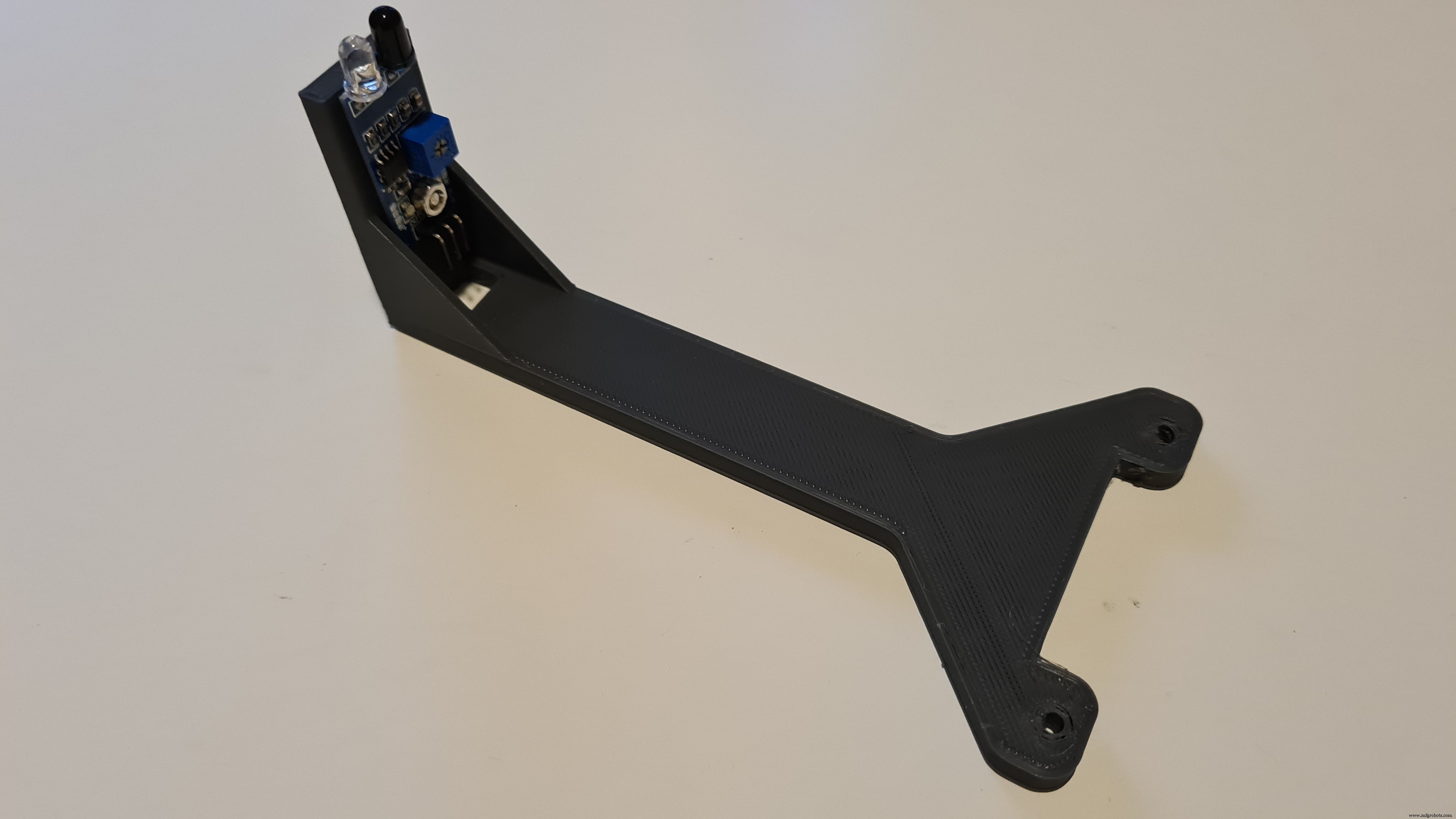
Pasang Sensor Penghalang IR ke lubangnya dan gunakan mur untuk mengencangkannya dan menyesuaikan posisinya.
Majelis Akhir!
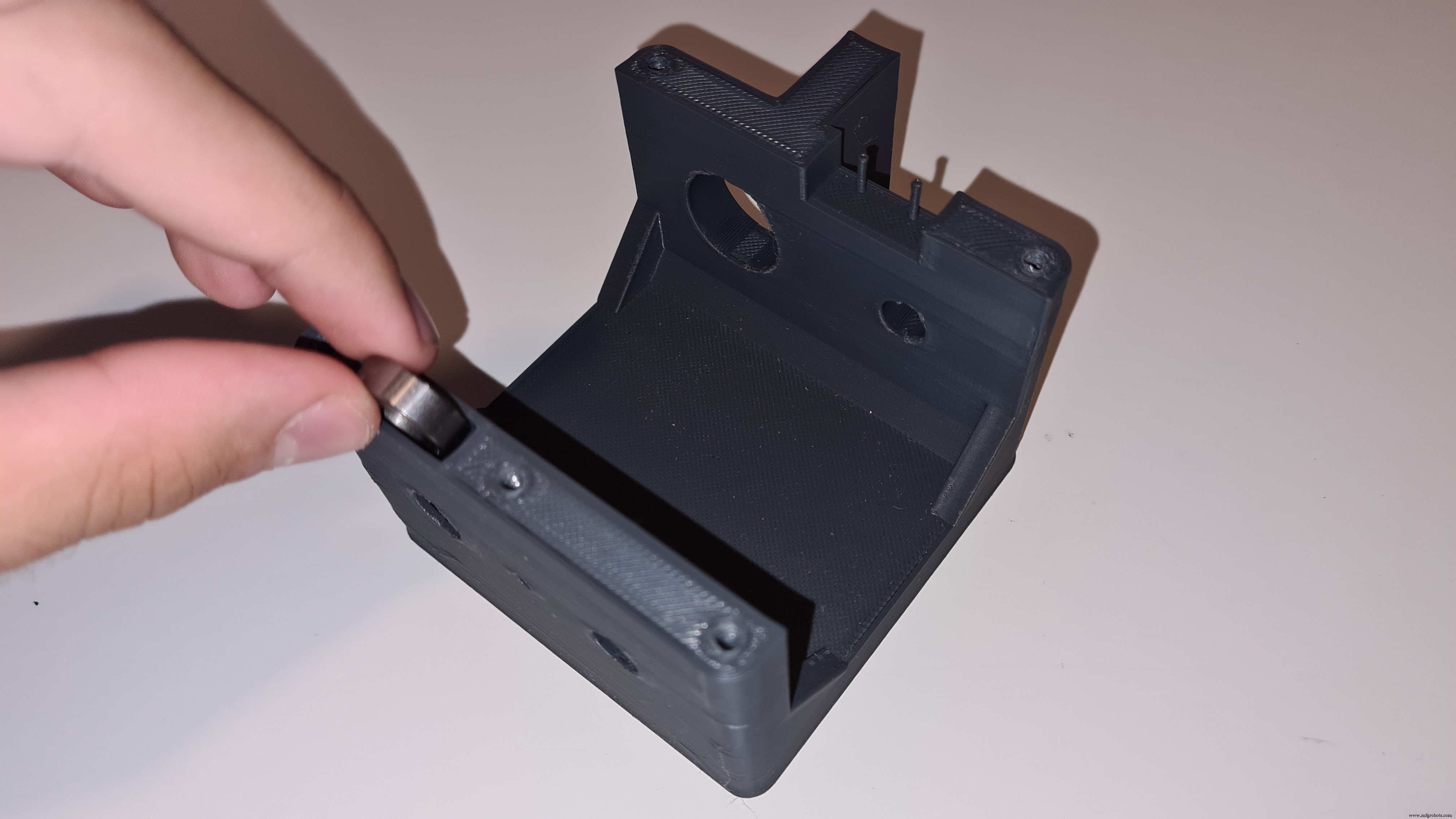
Masukkan bantalan.

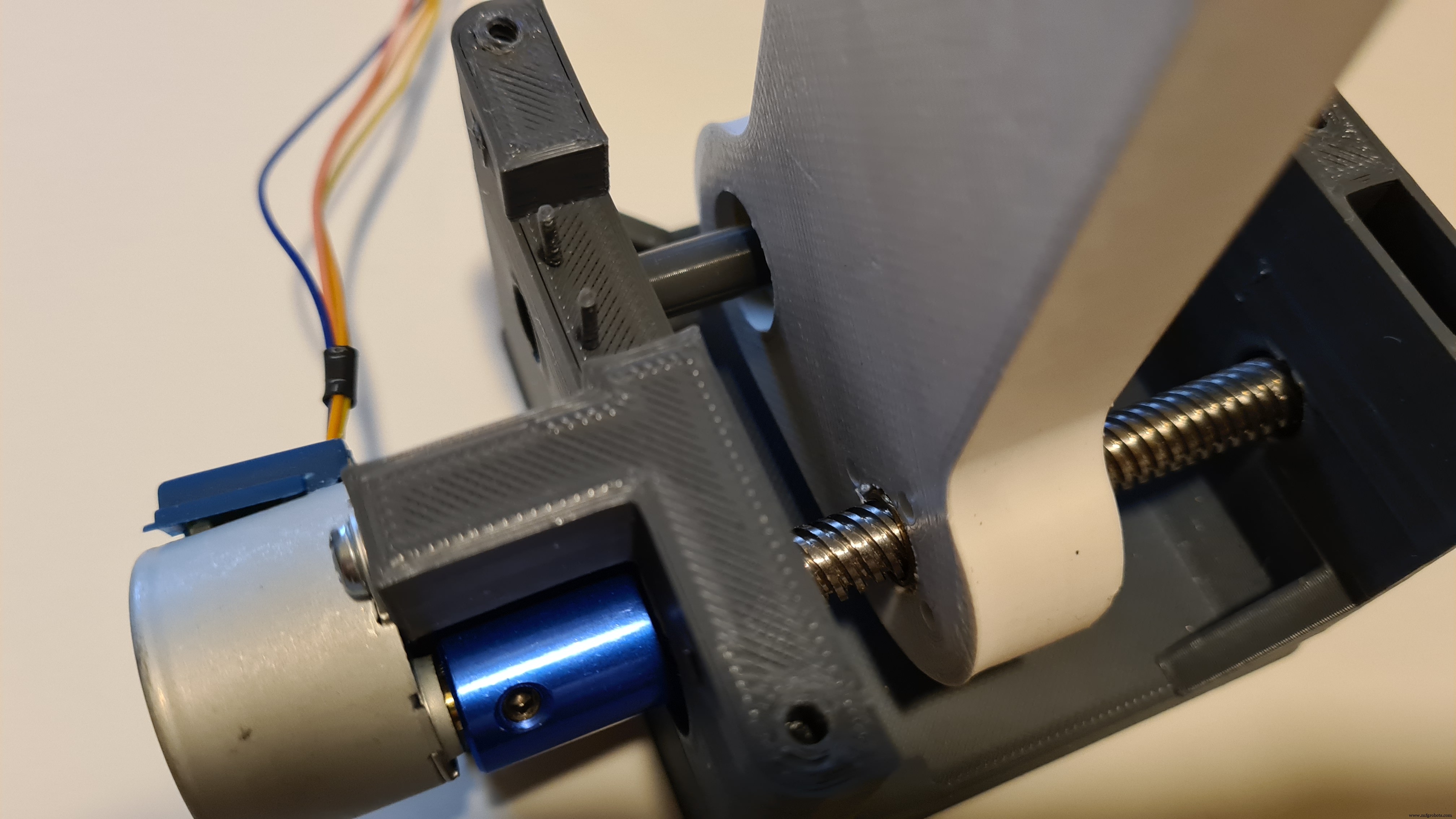
Tambahkan sekrup T8 dan unit Presser. (Sekrup T8 harus panjang 70mm hingga 82mm . Jika Anda memiliki sekrup yang lebih panjang, Anda harus memotongnya sesuai ukuran yang diinginkan menggunakan alat seperti gergaji besi. Jika tidak, Anda dapat mencoba pencetakan 3D.)

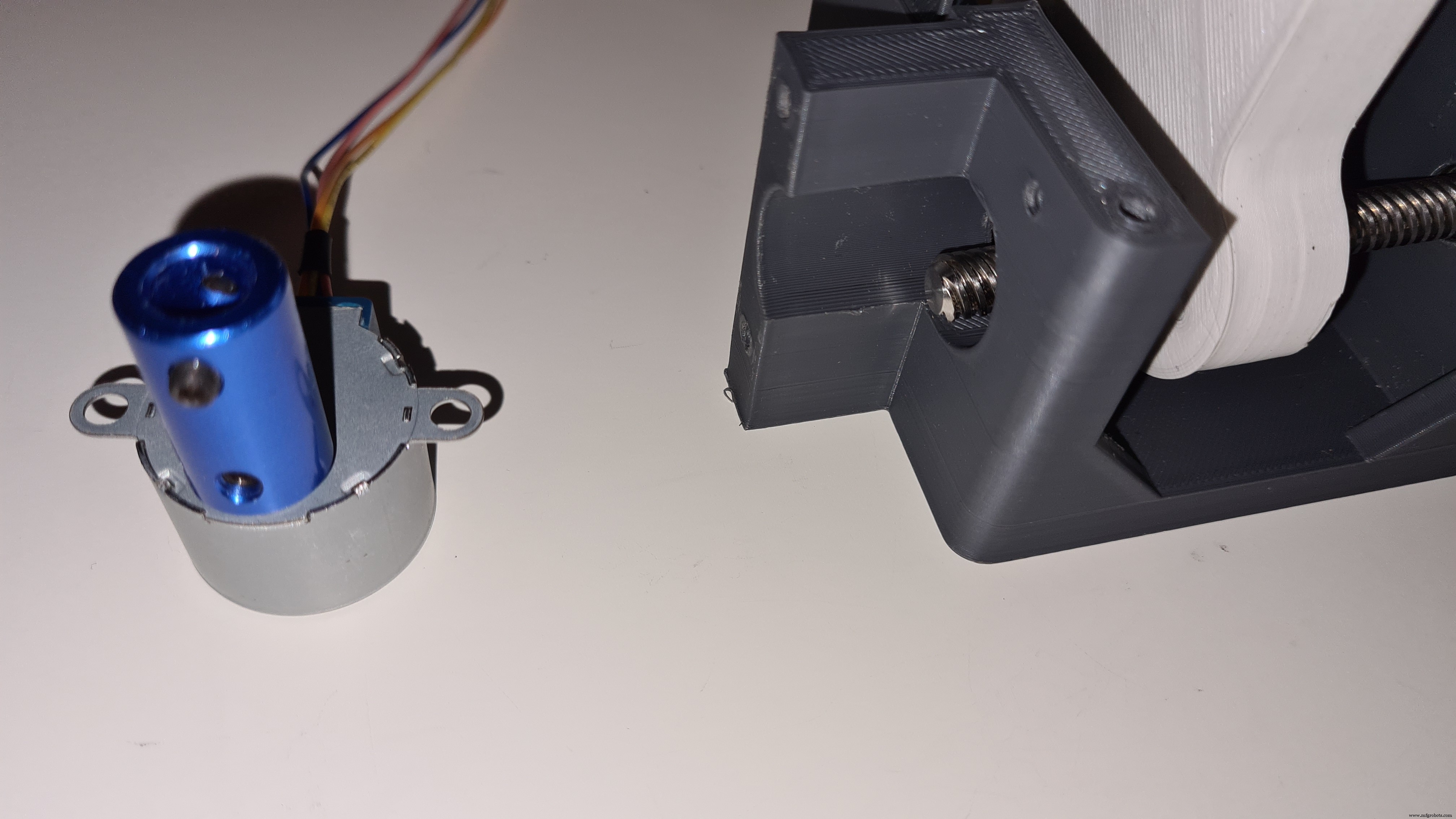
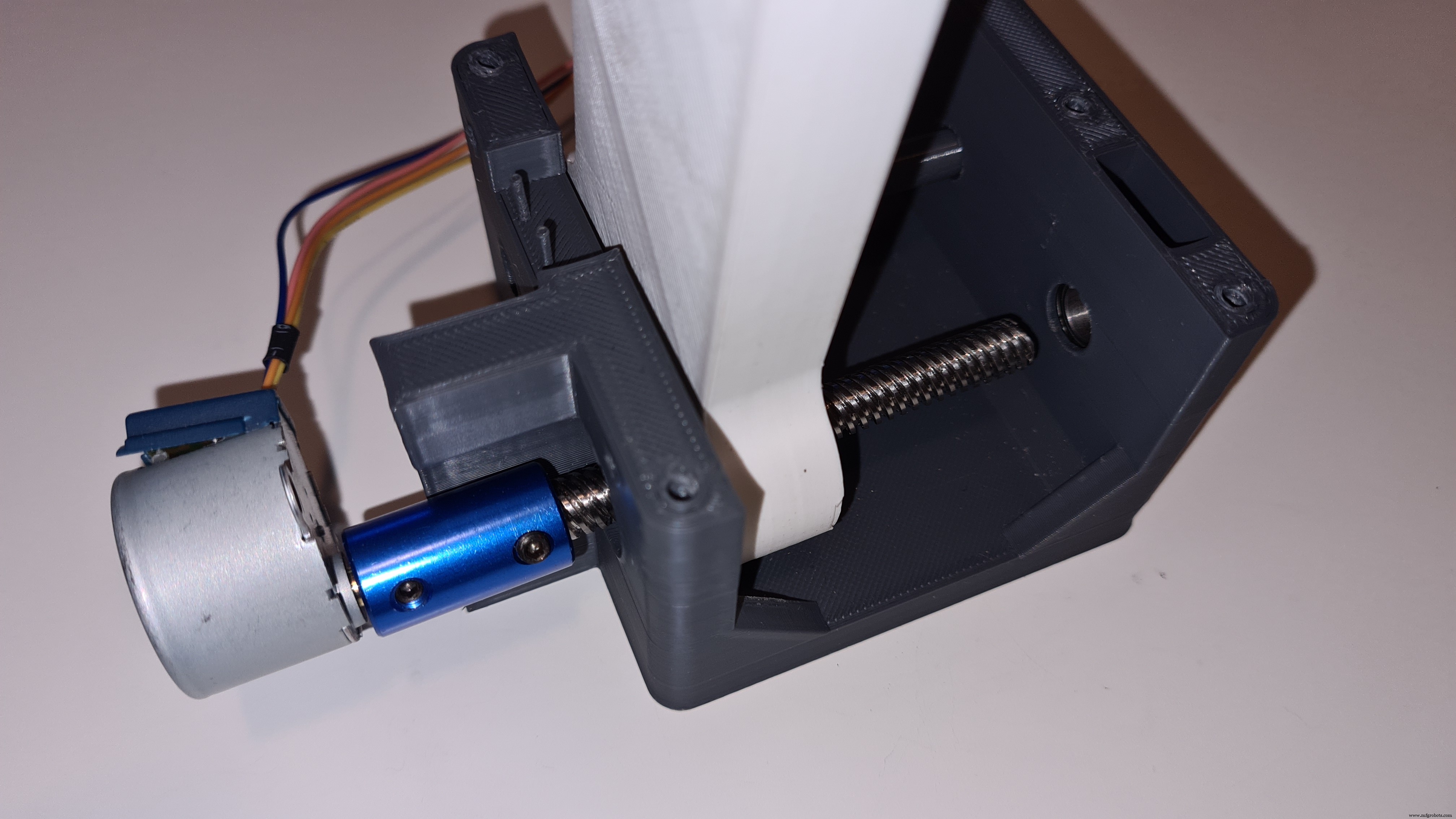
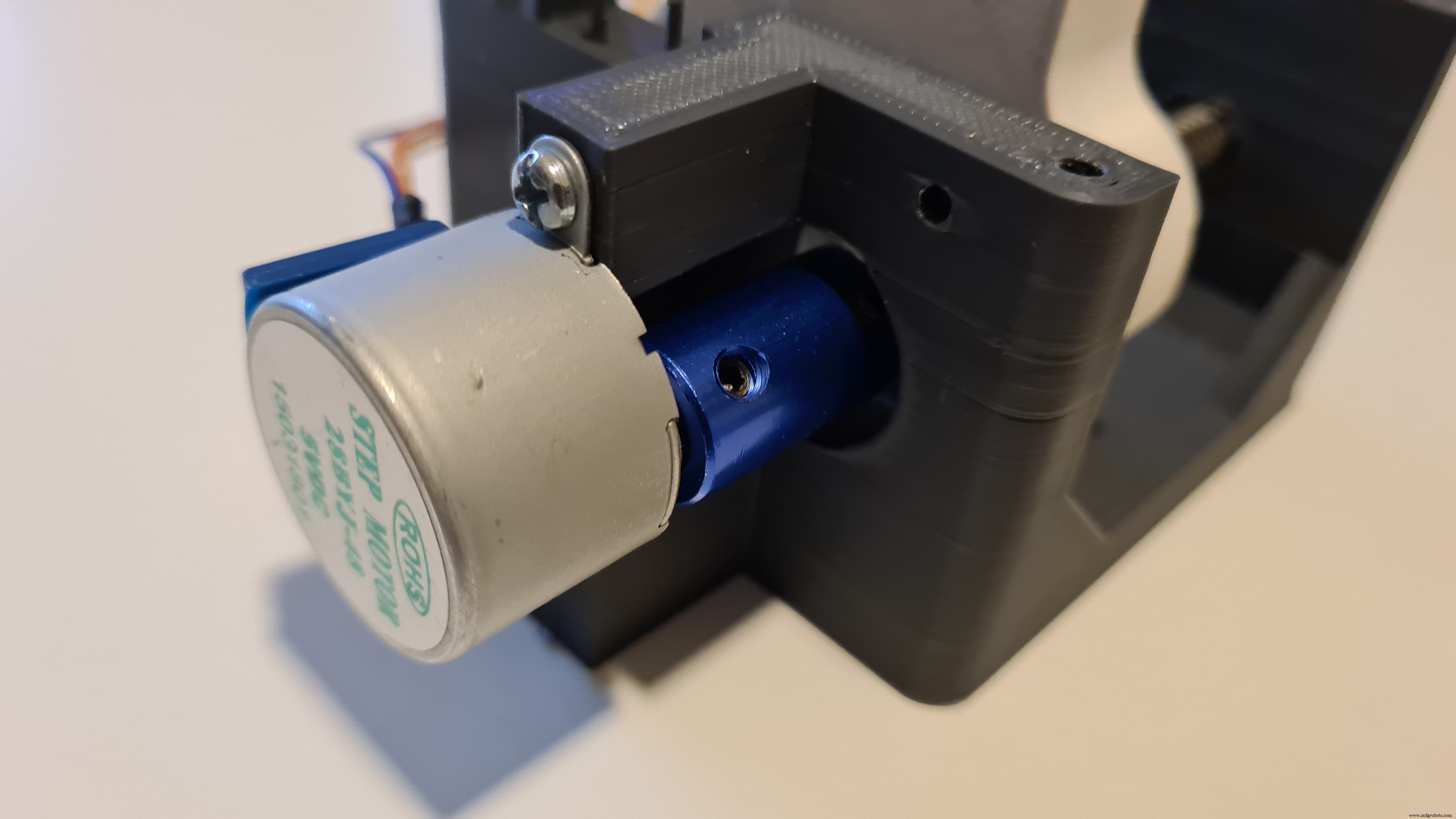
Kencangkan coupler ke poros motor. Kemudian kencangkan ke sekrup T8. Terakhir kencangkan motor ke alas dengan dua sekrup.
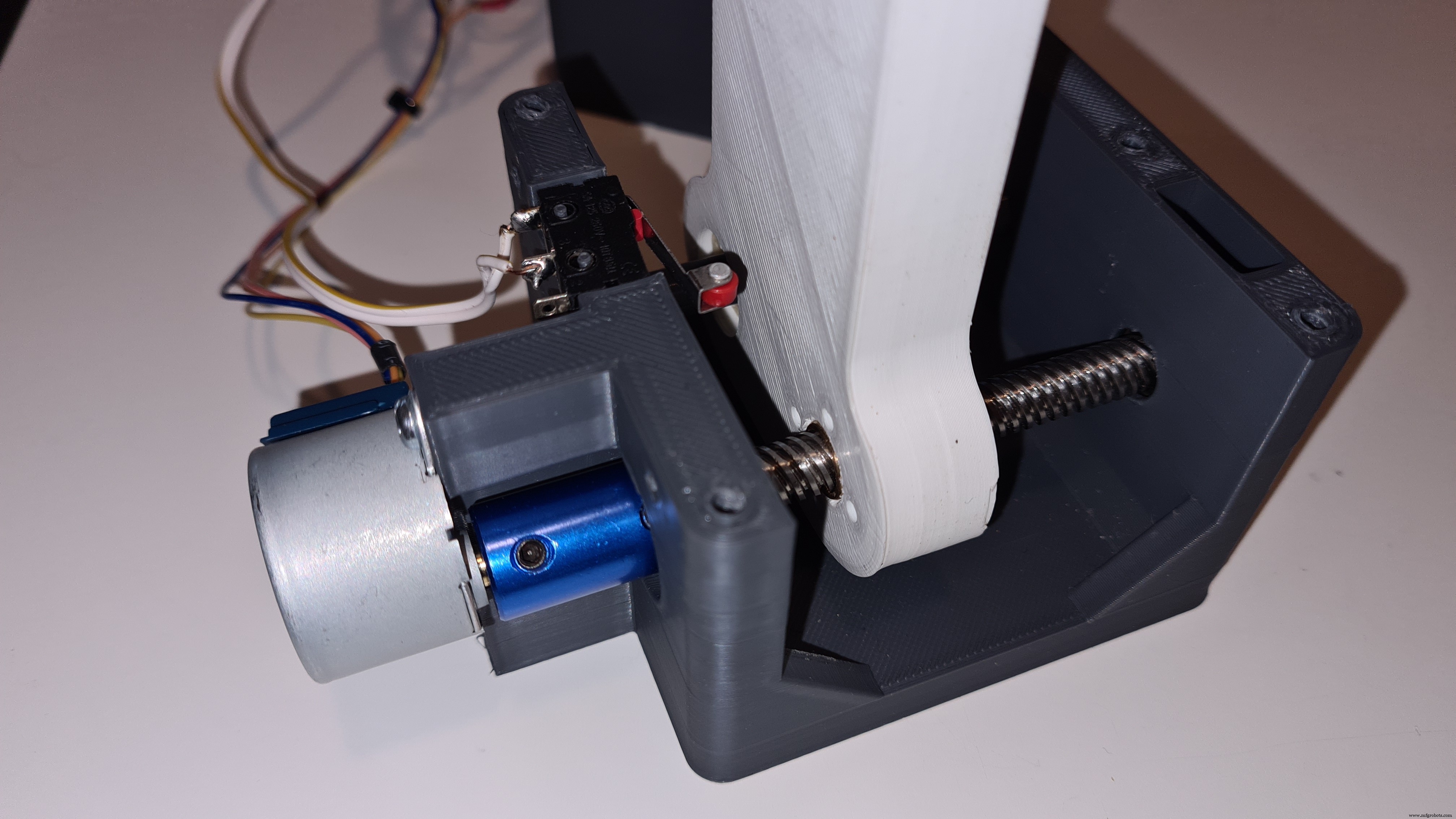
Tambahkan tombol penghenti akhir.
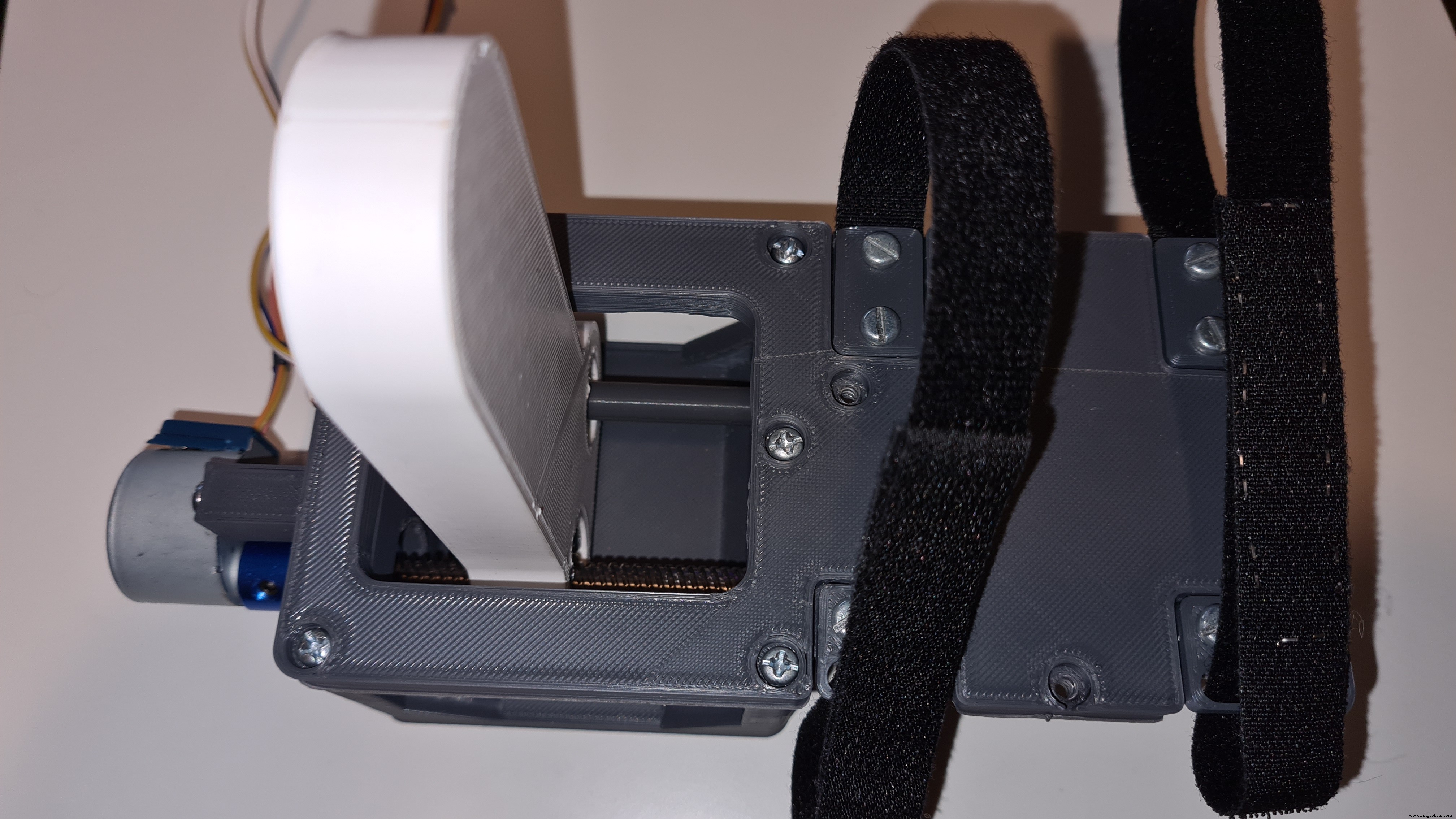
Pasang Penutup ke dasar dengan 5 sekrup.


Pasang Dudukan Sensor Penghalang IR ke bagian depan dudukan dengan 2 sekrup.
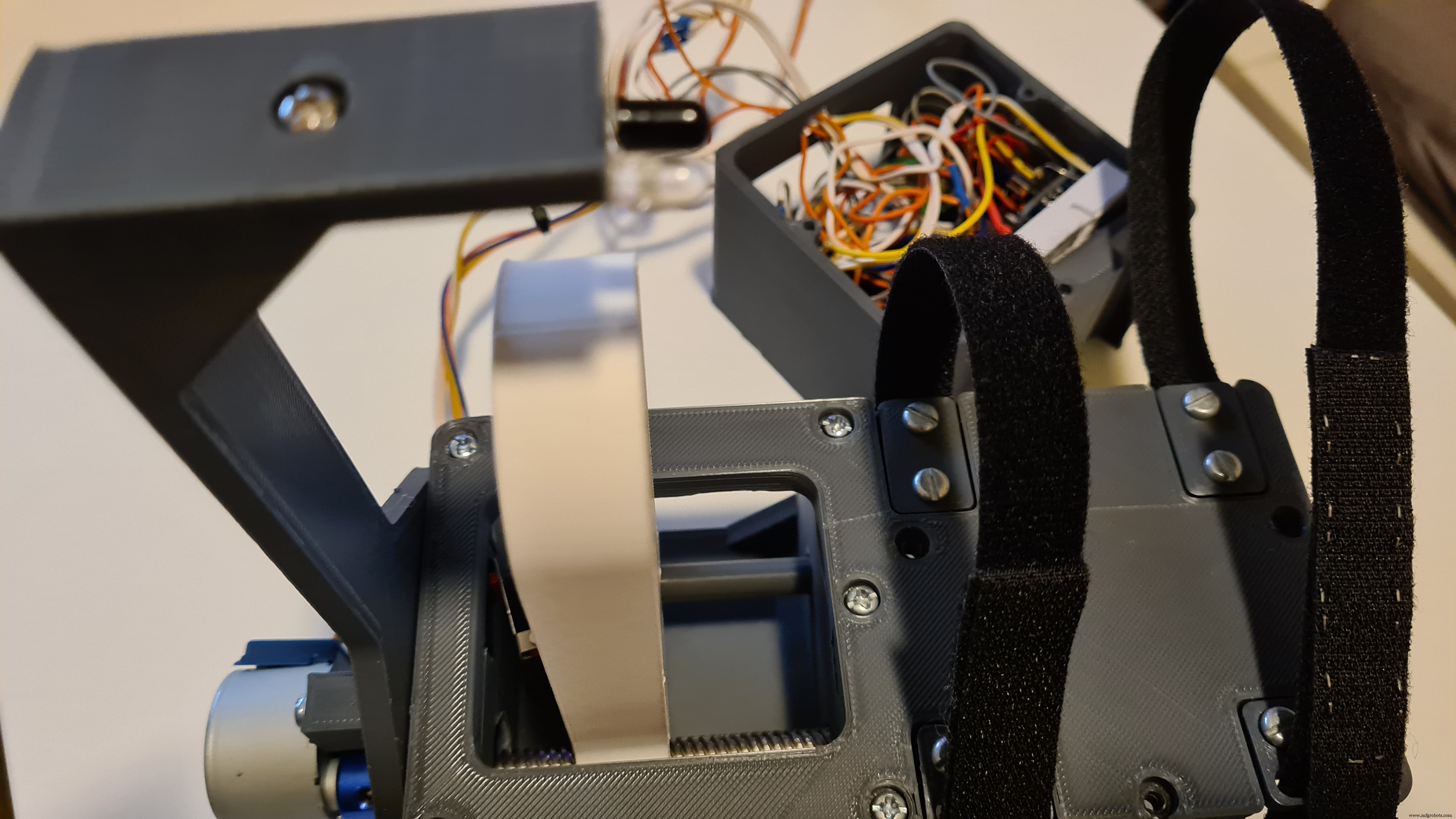
Terakhir pasang Kotak Elektronik ke Penutup dengan 3 sekrup! Bagus sekali, proyek selesai!
Kesimpulan

Proyek Aksesori yang dapat membuat sebagian besar Pembersih Tangan/Dispenser Sabun menjadi Otomatis dan Bebas Genggam akhirnya selesai!!
Terima kasih atas waktunya!!
// Tentukan sambungan pin &langkah motor per putaranconst int dirPin =2; //kita mendefinisikan pin dir dari driverconst int stepPin =3;//kita mendefinisikan pin langkah dari driverconst int enablePin =4;//kita mendefinisikan pin aktif dari driverconst int stepsPerRevolution =6000; // satu putaran penuh (360 derajat) adalah 2048 langkahint endStop =8;//kita mendefinisikan pin input dari switch endstop irSensor =9;//kita mendefinisikan pin input dari IR hambatan sensorvoid setup(){ pinMode(endStop , INPUT);// Deklarasikan pin sebagai Inputs pinMode(irSensor,INPUT); pinMode(stepPin, OUTPUT);// Deklarasikan pin sebagai Output pinMode(dirPin, OUTPUT); pinMode(enablePin, OUTPUT); digitalWrite(enablePin, LOW);// Ini mengaktifkan driver kami while(digitalRead(endStop) ==LOW)// Ketika kode dimulai, stepper akan berputar hingga sakelar penghenti akhir { //stop switch diaktifkan digitalWrite(dirPin, HIGH ); //arah disetel berlawanan arah jarum jam // Putar motor perlahan untuk(int x =0; x <1; x++) { digitalWrite(Pin langkah, TINGGI); delayMicroseconds(2000); digitalWrite(Pin langkah, RENDAH); delayMicroseconds(2000); } }digitalWrite(enablePin, HIGH);// Ini menonaktifkan driver kita sehingga ketika tidak //digunakan driver tidak mengkonsumsi arus}void loop(){ if(digitalRead(irSensor)==0)// Jika ada rintangan (tangan) di depan sensor IR Obstacle {digitalWrite(enablePin, LOW);//Kami mengaktifkan driverdigitalWrite(dirPin, LOW);// arahnya disetel searah jarum jam // Putar motor perlahan untuk(int x =0; x Suku cadang dan penutup khusus
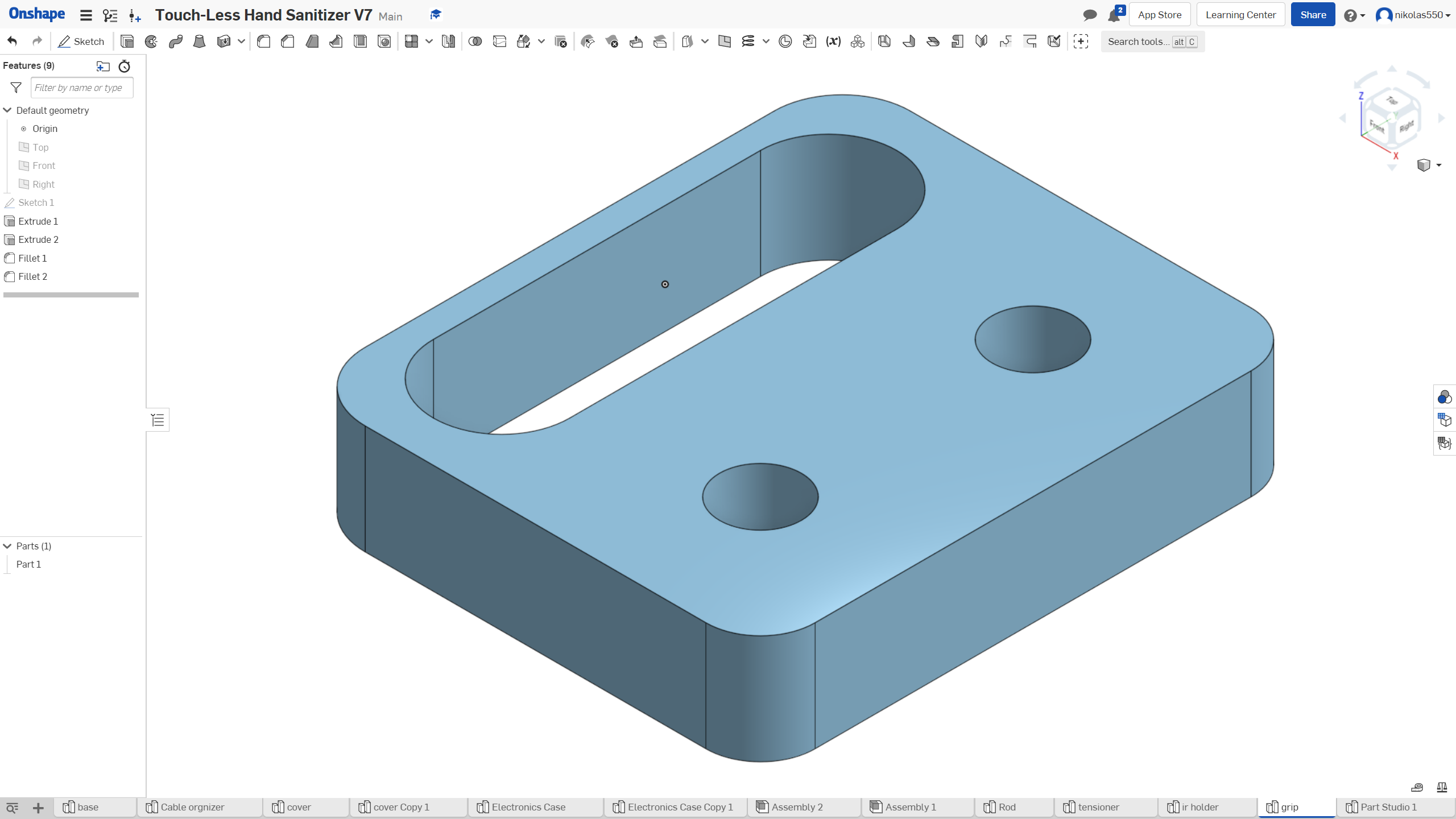
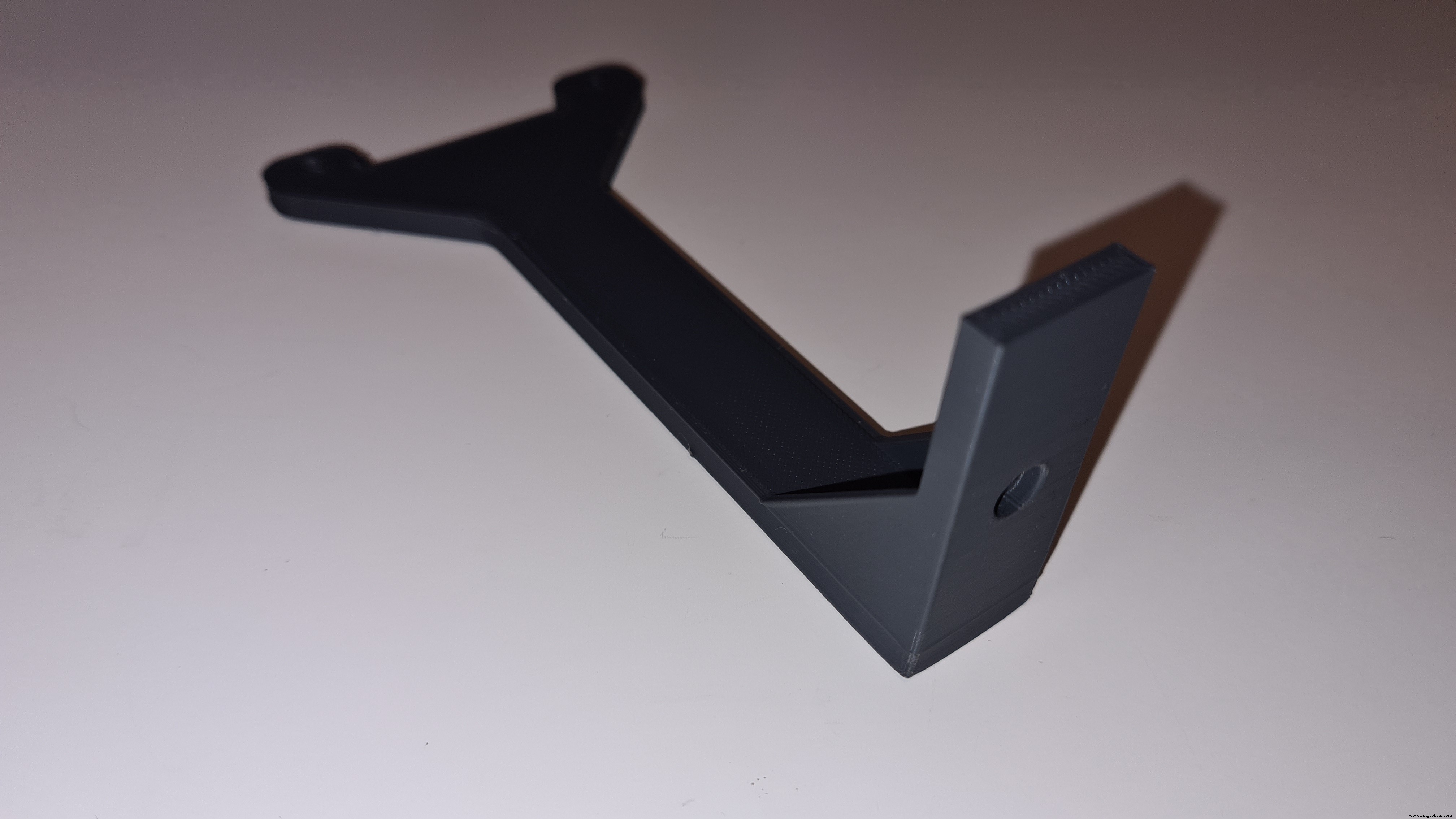
Basis utama perangkat.Ini adalah komponen yang benar-benar menekan dispenser.Penutup perangkat.Bertindak sebagai wadah untuk elektronik.Membuat mekanisme pengikatan Velcro.
Anda akan membutuhkan dua ini.Bertindak sebagai penopang untuk bagian penekan.Itu akan terhubung ke dasar dan bertindak sebagai penopang untuk sensor ir.Memegang Velcros di penutup.
Anda membutuhkan 2 di antaranya. Skema
Proses manufaktur
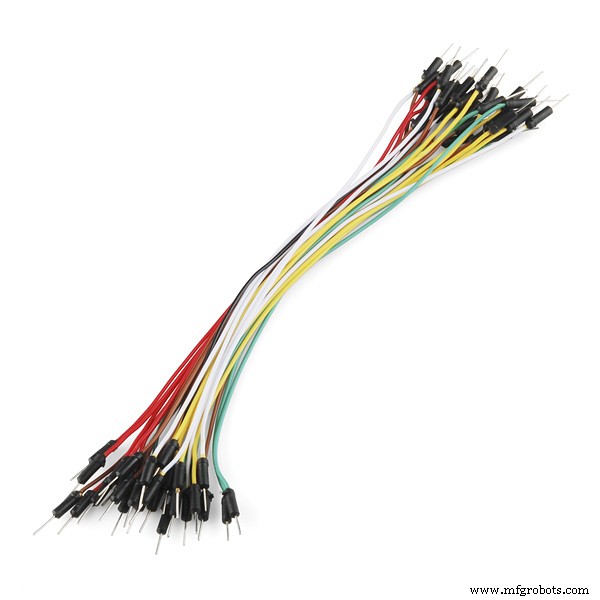
Komponen dan persediaan Kabel jumper (generik) × 1 Arduino Yun × 1 Resistor 221 ohm × 1 Sakelar Tombol Tekan SparkFun 12mm × 1 Breadboard (generik) × 1 Aplikasi dan layanan online Editor Web Arduino Blynk Tent
Komponen dan persediaan Arduino Nano R3 × 2 Modul nRF24 (Generik) × 2 SparkFun Dual H-Bridge driver motor L298 × 1 Kabel jumper (generik) × 1 Motor DC, 12 V × 2 Alat dan mesin yang diperlukan Besi solder (generik) Pistol lem p
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Komponen dan persediaan Sensor Ultrasonik - HC-SR04 (Generik) × 2 Arduino Nano R3 × 1 Resistor foto × 1 Maxim Integrated 8x8 LED Matrix MAX7219 × 2 Ukuran Setengah Papan Tempat Memotong Roti Tanpa Solder × 1 Kabel jumper (generik) × 1