Tentang proyek ini
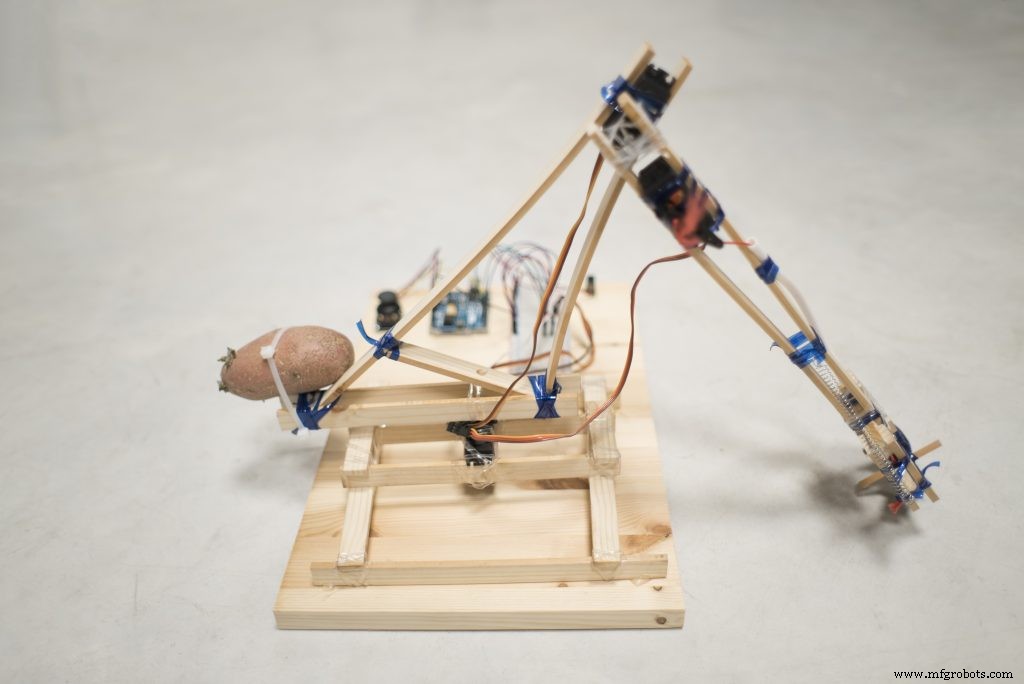
Lengan robot adalah salah satu proyek DIY paling populer yang akan Anda temukan secara online. Ketika kami duduk untuk merancang versi lengan robot Arduino kami, kami memutuskan untuk mengambil tantangan dan membuatnya dari bahan daur ulang. Cara kita melihatnya, menjadi pembuat, juga berarti berpikir out of the box dan bertanya pada diri sendiri bagaimana memanfaatkan berbagai bahan yang tersedia untuk Anda, tanpa menghasilkan lebih banyak limbah. Menggunakan potongan kayu bekas dan beberapa botol plastik, kami menyatukan tubuh lengan robot. Kami membuat heat shrink dari botol plastik dengan teknik rapi yang kami pelajari secara online, dan menggunakan kentang (!) sebagai pemberat agar robot tidak terbalik.
Proyek ini sangat menyenangkan bagi kami, karena mengingatkan kami mengapa kami suka membuat begitu banyak.
Anda juga dapat menemukan tutorial lengkap untuk proyek ini dan lainnya di blog kami.
Catatan:Dalam video Anda akan melihat versi circuito.io sebelumnya, oleh karena itu, sebaiknya ikuti langkah-langkah dalam tutorial.
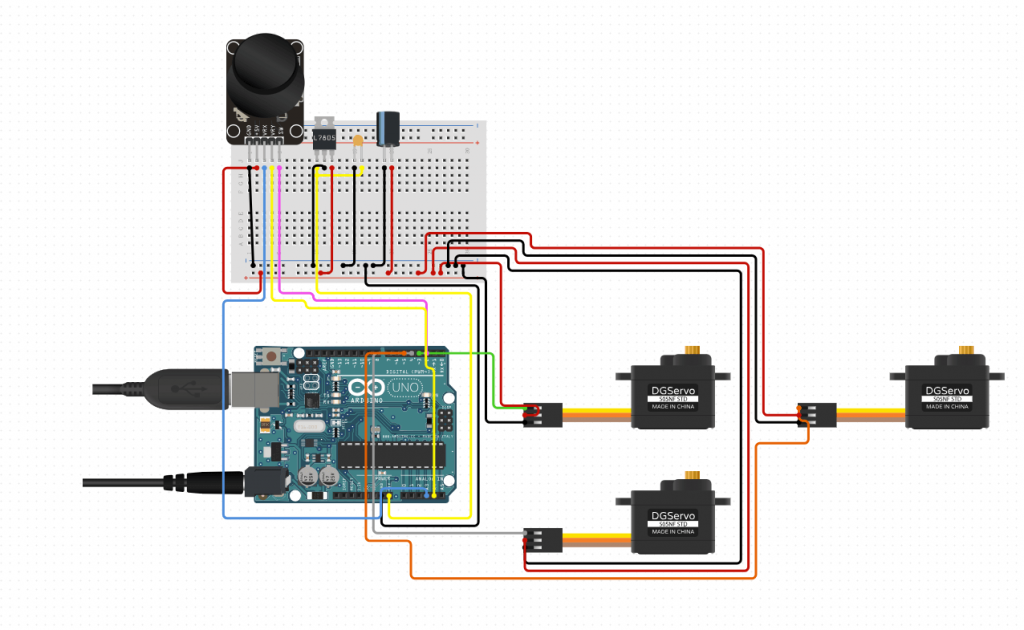
Elektronik
Komponen utama
- 3 Servo SparkFun (Generik Metal Gear)
- Modul PS2 Joystick 2 sumbu
Komponen sekunder
- Kapasitor Elektrolitik - 1uF/50V
- Papan Roti - Setengah Ukuran
Klik di sini untuk melihat diagram pengkabelan
Kode lengan robot - Pertama, Anda harus mengunduh kode sirkuit dari tab kode di circuito.io.
- Ikuti langkah-langkah untuk memeriksa apakah Anda memasang kabel dengan benar
- Ganti kode uji firmware.ino dari circuito.io dengan kode firmware.ino di repositori. Biarkan perpustakaan lain apa adanya.
- Pastikan untuk meninggalkan "Sertakan Perpustakaan" dan "Definisi pin". Periksa apakah definisi pin cocok.
Bahan 
- Kami menggunakan potongan kayu setebal 1 cm yang kami miliki di bengkel kami. Di beberapa tempat, kami merekatkan 2 bagian untuk kekuatan dan kekokohan ekstra. Anda dapat memeriksa bahan lain yang ada di sekitar Anda, tetapi pastikan bahan tersebut kokoh namun fleksibel.
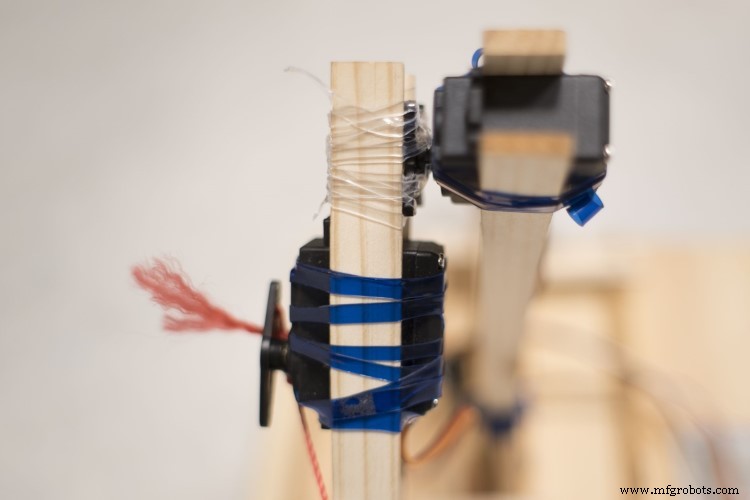
- Untuk mengikat bagian-bagiannya, kami membuat heat-shrink dari botol plastik. Ini adalah teknik luar biasa yang dapat Anda buat dengan botol plastik yang Anda miliki di rumah. Main-main dan uji ini sedikit, Anda akan terkejut betapa kuatnya mereka.
- Lengan bergerak dalam 3 sumbu, oleh karena itu kita akan menggunakan 3 motor servo. Inilah artikel bagus yang menjelaskan cara memilih motor servo untuk proyek Anda. Kami akan menggunakan Servo Sparkfun - perlengkapan logam umum.
Perakitan
Basis
Mulailah membangun dengan dasar yang kokoh agar lengan tidak terbalik. Pada saat yang sama, kita juga perlu memahami cara terbaik untuk mengikat dan mengikat potongan kayu sehingga dasarnya kokoh.
Pada gambar di bawah ini Anda dapat melihat cara kami menggunakan heat-shrink dan kentang (!) sebagai alas sebagai pemberat. Jangan lupa untuk menggantinya dari waktu ke waktu :)
Saldo
Menempatkan servo kedua lebih rumit dan kami merasa area ini masih membutuhkan perhatian. Kami menyadari, setelah membangun prototipe, bahwa kami belum cukup memikirkan untuk menyeimbangkan lengan atas. Oleh karena itu, motor servo menarik banyak arus - sesuatu yang dapat diatasi dengan menggunakan penyeimbang di sisi berlawanan dari lengan.
Pegangannya
Ada berbagai jenis gripper yang kami pertimbangkan, dan kami tidak begitu yakin apa yang akan kami lakukan di sini. Akhirnya, kami memutuskan untuk membuat satu sisi gripper statis sehingga memiliki grip yang kuat. Seperti yang dapat Anda lihat pada gambar di bawah ini, untuk bagian yang bergerak kami membuat sambungan, yang dikendalikan oleh servo dan ditambahkan pegas untuk menutup dan membuka.
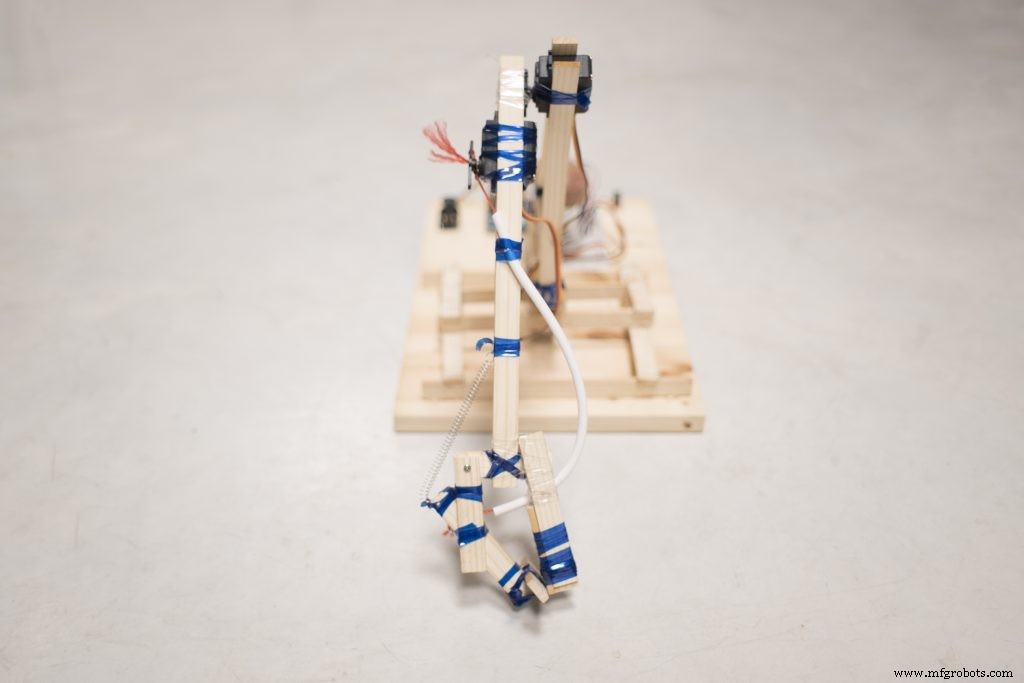
Akhirnya, kami menempatkan beberapa tali di dalam tabung elastis untuk menghubungkan antara motor servo dan gripper, mekanisme yang sama yang dapat Anda temukan pada rem sepeda.
Itu pada dasarnya! Anda mungkin perlu melakukan sedikit perubahan dan perubahan pada kode dan mekanik sesuai dengan bahan dan elektronik yang Anda gunakan. Jika Anda memiliki wawasan atau komentar, kami akan senang mendengarnya! Bagikan dengan kami di forum kami atau di komentar di bawah
Kode
Kode Lengan Robot
1. Ganti kode tes firmware.ino dari circuito.io dengan kode firmware.ino di repositori ini2. Biarkan perpustakaan lain apa adanya.3. Pastikan untuk meninggalkan "Sertakan Perpustakaan" dan "Definisi pin"4. Periksa apakah definisi pin cocok denganhttps://github.com/Circuito-io/Robotic-Arm