Tentang proyek ini
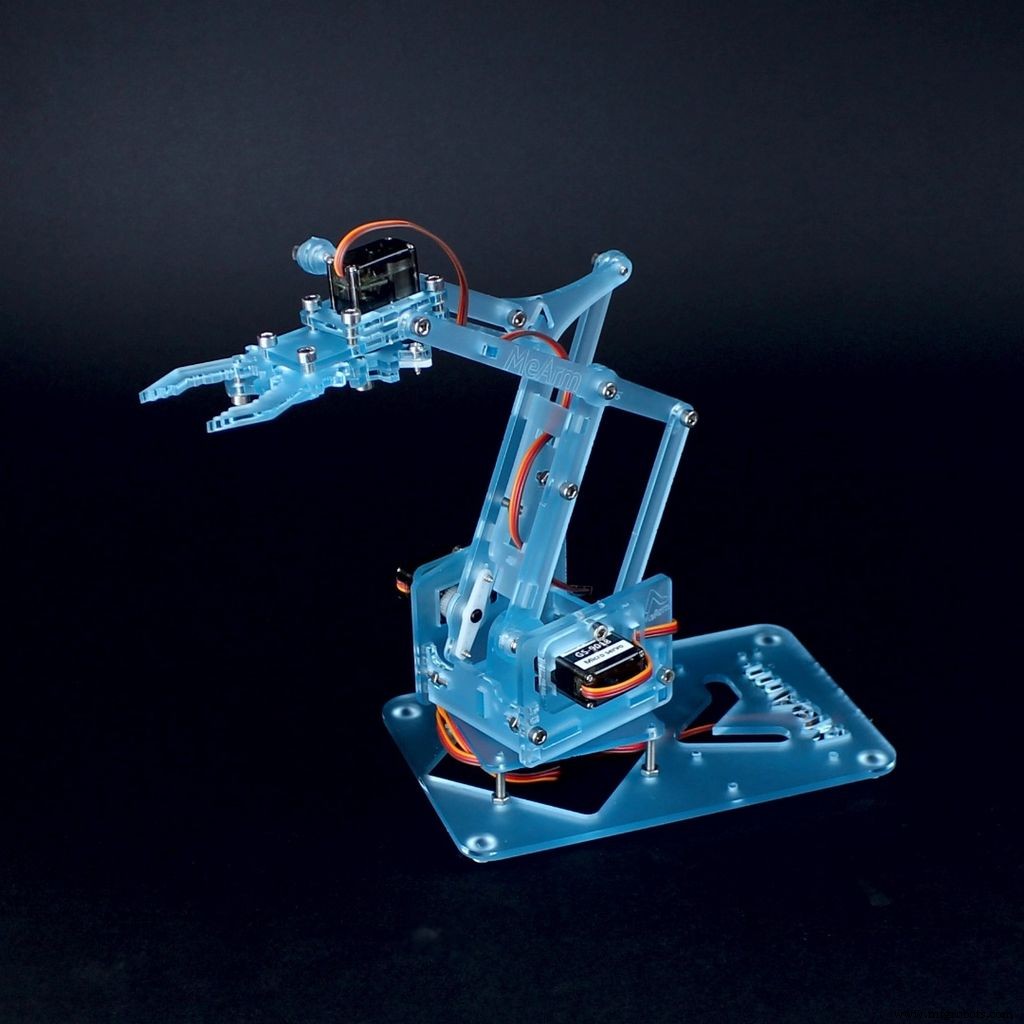
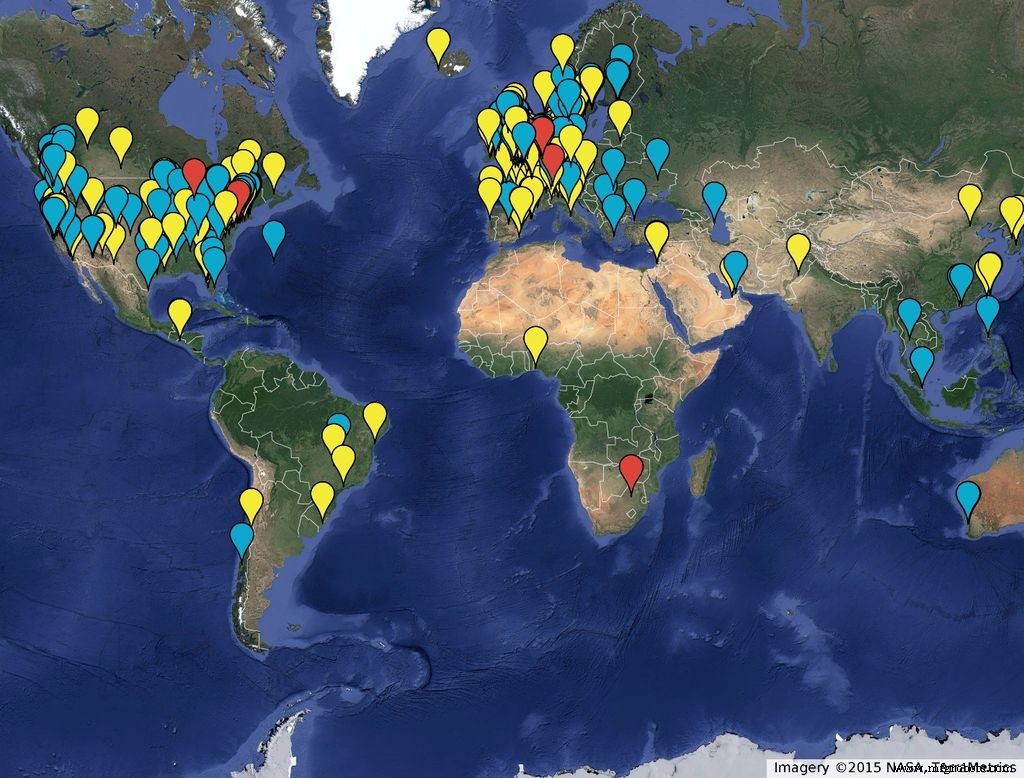
Ini adalah versi terbaru dari instruksi pembuatan untuk Lengan Robot MeArm. MeArm pertama kali hadir untuk instruksi pada April 2014 ketika kami mengklaim hadiah kedua dalam Kontes Robot. Sejak itu kami telah melihat sekitar 10.000 dibangun di seluruh dunia! Hanya beberapa yang ditampilkan di peta kami, tetapi kami sangat bangga bahwa dengan bantuan instruksi, kami telah menjadi robot virus pertama di dunia!
Kami telah menyusun petunjuk ini untuk melengkapi petunjuk yang ada di laman sumber daya kami.
Langkah 1:Ambil file Anda, jalankan lazors Anda! 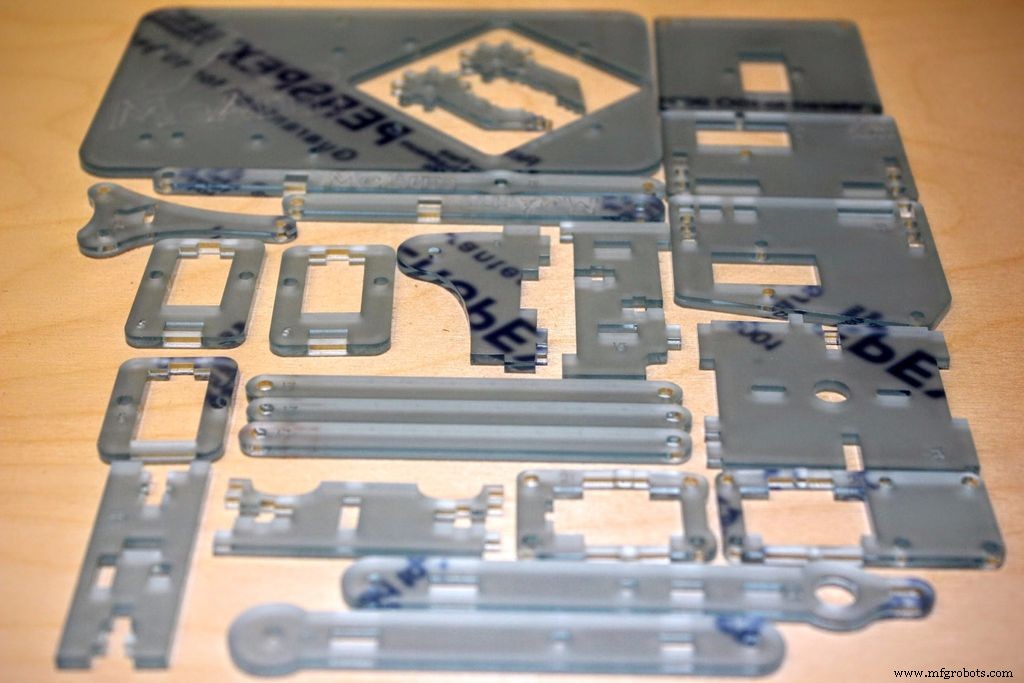
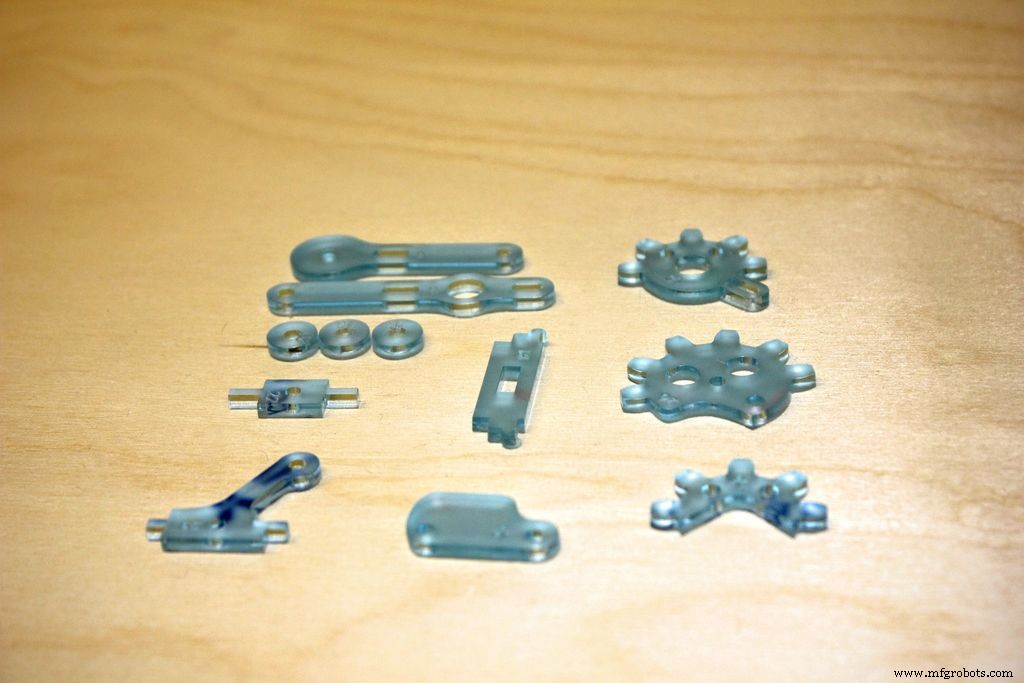
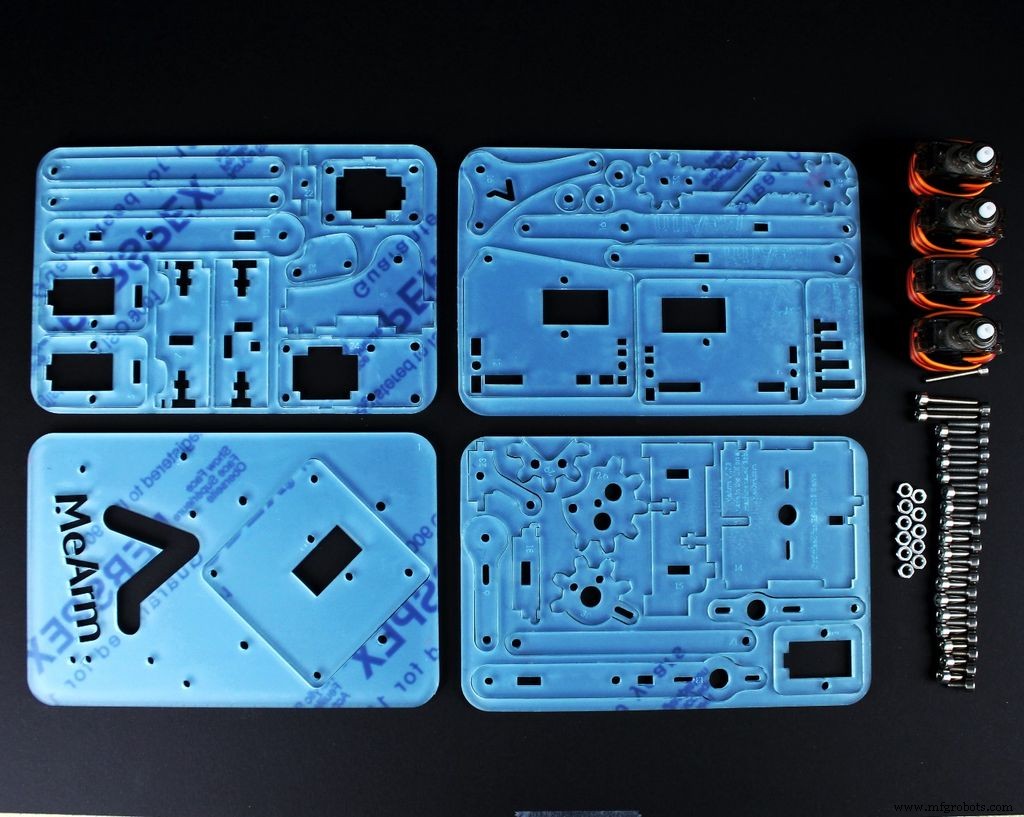
MeArm masih dan hampir selalu menjadi perangkat keras open source. Jadi Anda bisa mengambil file kami di thingiverse. Ini adalah file .dxf sehingga harus bekerja pada sebagian besar pemotong laser dan kami telah menempatkan kotak di sekitar bagian sehingga Anda dapat mengaturnya ke ukuran yang benar. Kami menggunakan akrilik 3mm, tetapi desainnya cukup toleran dan kami telah melihatnya dibuat dari kayu dan bahkan dicetak 3D.
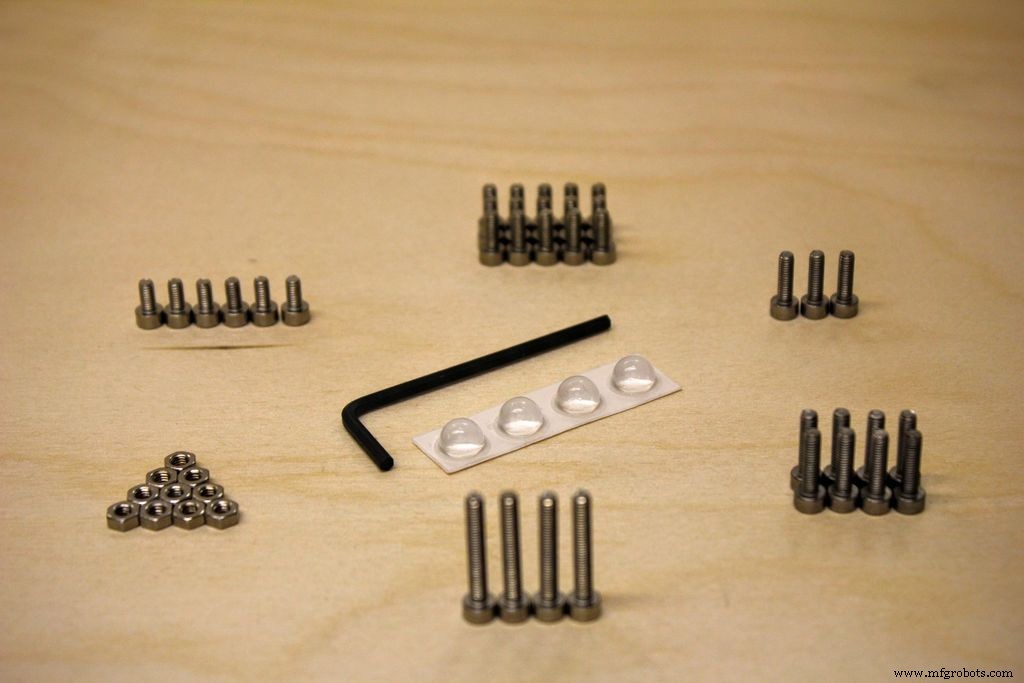
Anda akan membutuhkan banyak sekrup juga. Pemuatan saat ini membutuhkan:
Kacang x 11
6mm x 7
8mm x 15
10mm x 5
12mm x 8
20mm x 4
Semua ukuran M3, itu Metrik 3mm. Yang saya pahami mungkin sulit ditemukan di Amerika Serikat, tetapi ayolah, Anda berhasil sampai ke bulan, Anda dapat menemukan alternatif yang tepat!
Langkah 2:Tahan! Ayo kalibrasi! 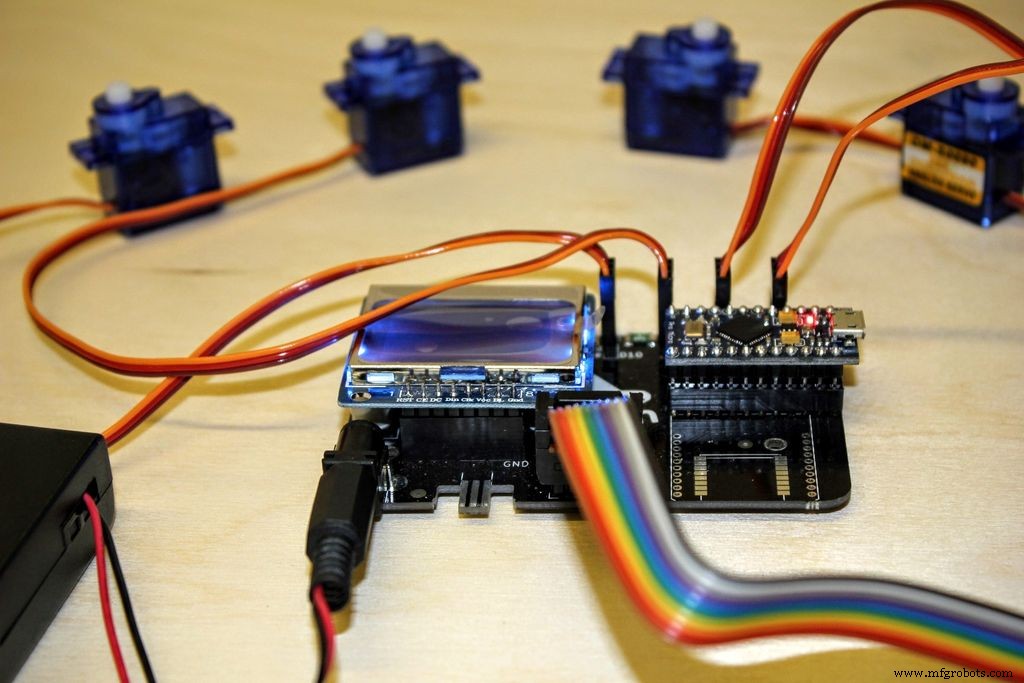

Jika Anda telah memotong bagian-bagian Anda dengan laser atau membeli salah satu kit kami, Anda pasti ingin membuatnya dibangun. Tetapi pertama-tama Anda harus menyelesaikan langkah penting. Kita perlu mengkalibrasi servos. Di sini kami akan menggunakan Brains Board kami, yang kompatibel dengan Arduino, tetapi Anda dapat menggunakan apa pun yang akan menghasilkan sinyal PWM untuk mengkalibrasinya. Ada kode MeArm yang tersedia untuk Arduino, Raspberry Pi, Beaglebone Black, Sparkcore, dan Espruino.
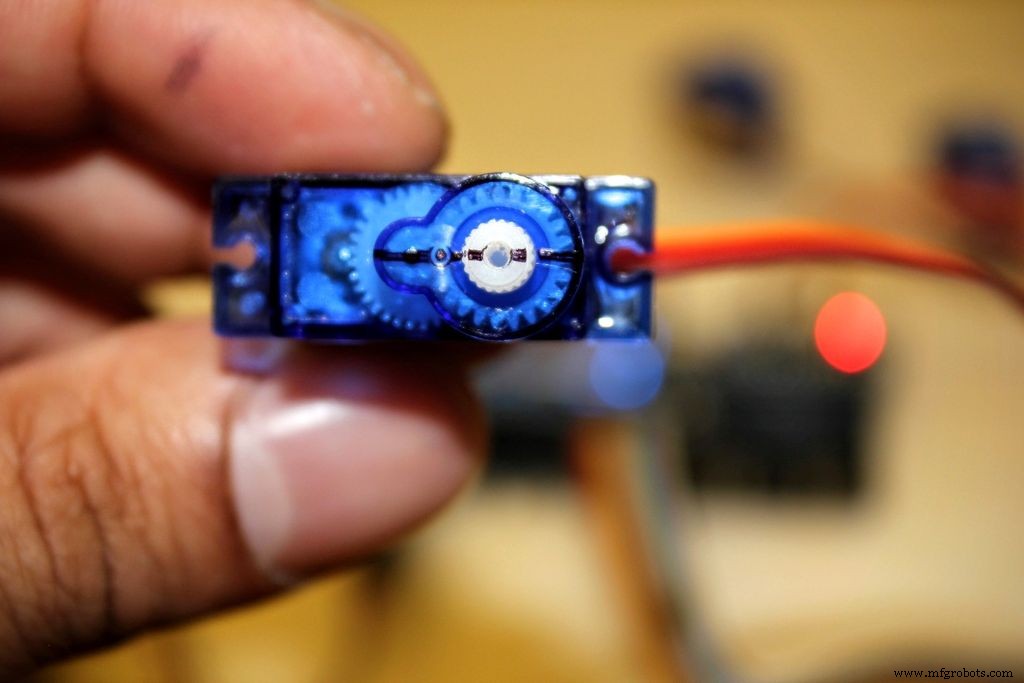
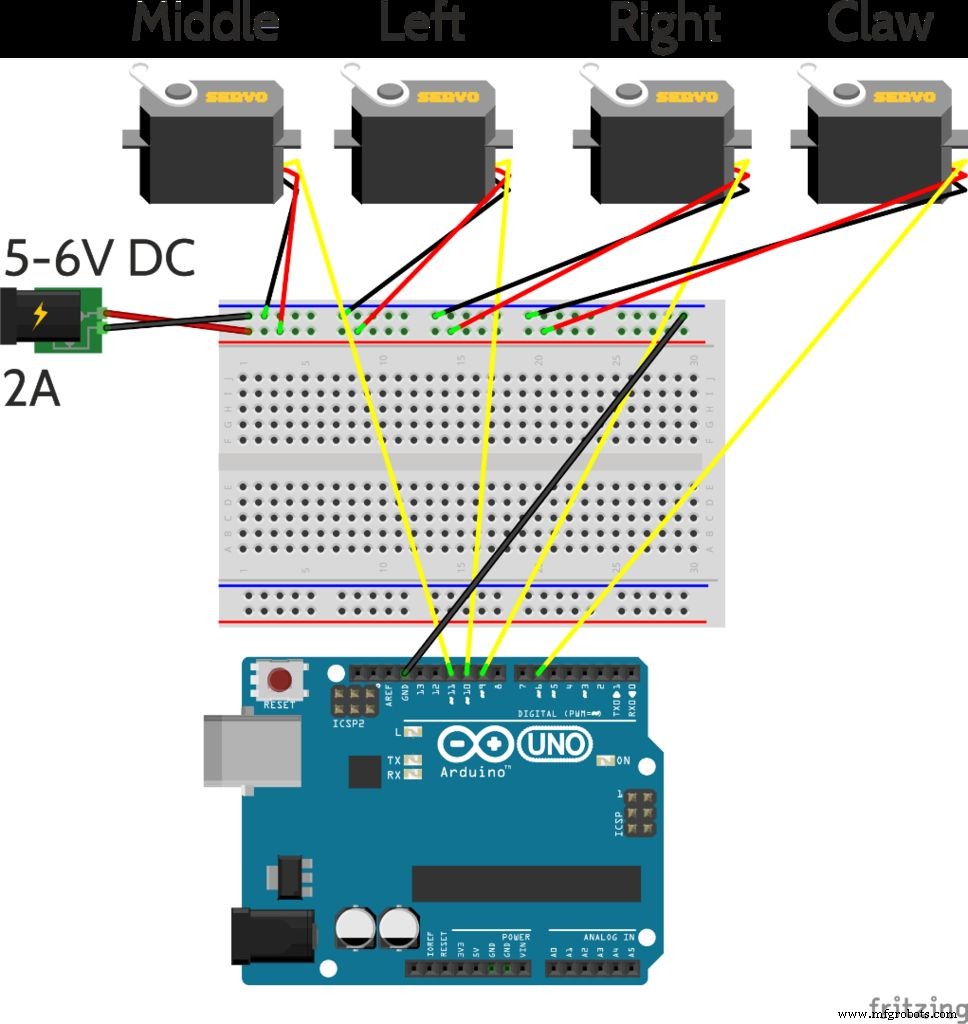
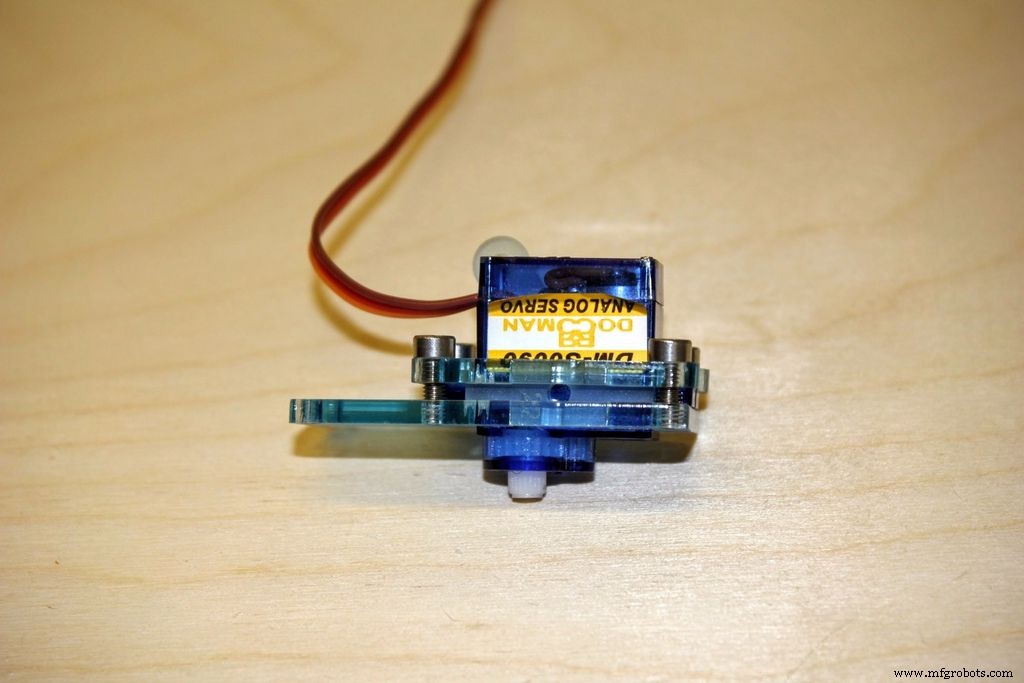
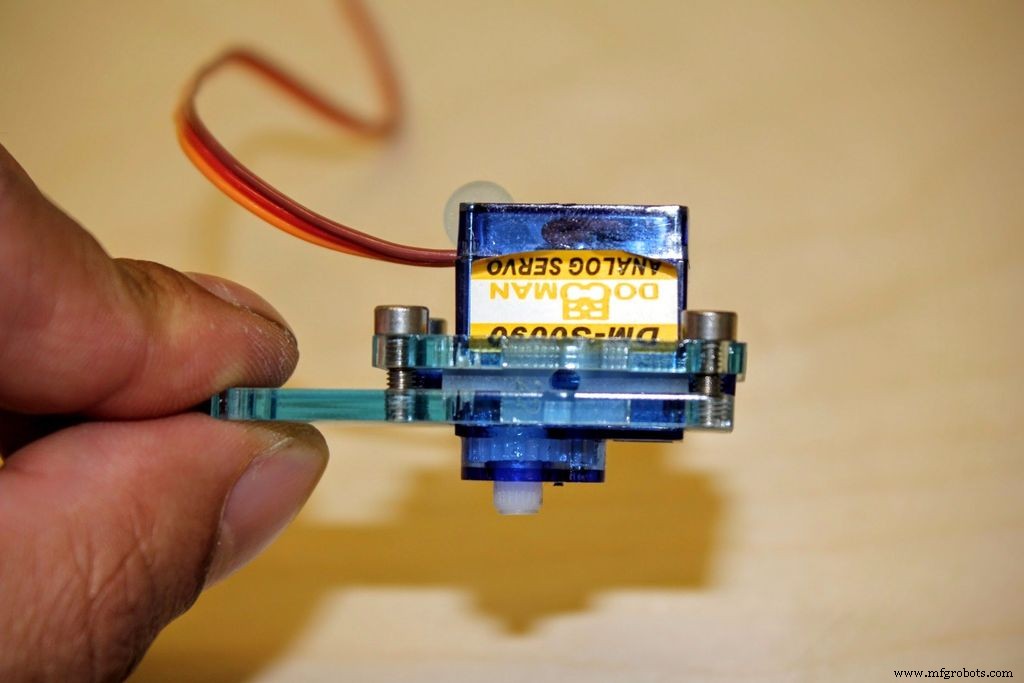
Menggunakan Brains Board kami, itu akan diprogram untuk pergi ke posisi default. Yaitu 90, 90, 90 dan 25 untuk servo masing-masing untuk pusat, kiri, kanan, dan cakar. Tandai garis tengah ke poros dan badan servo dan Anda juga dapat menandainya c, l, r, dan c atau dengan sistem lain yang berarti bagi Anda.
Jangan tergoda untuk memutarnya dengan tangan, torsi yang diberikan oleh kekuatan besar Anda dapat melucuti gigi servo. Untuk alasan yang sama, sangat penting bagi Anda untuk melakukan proses ini sebelum membangun MeArm Anda.
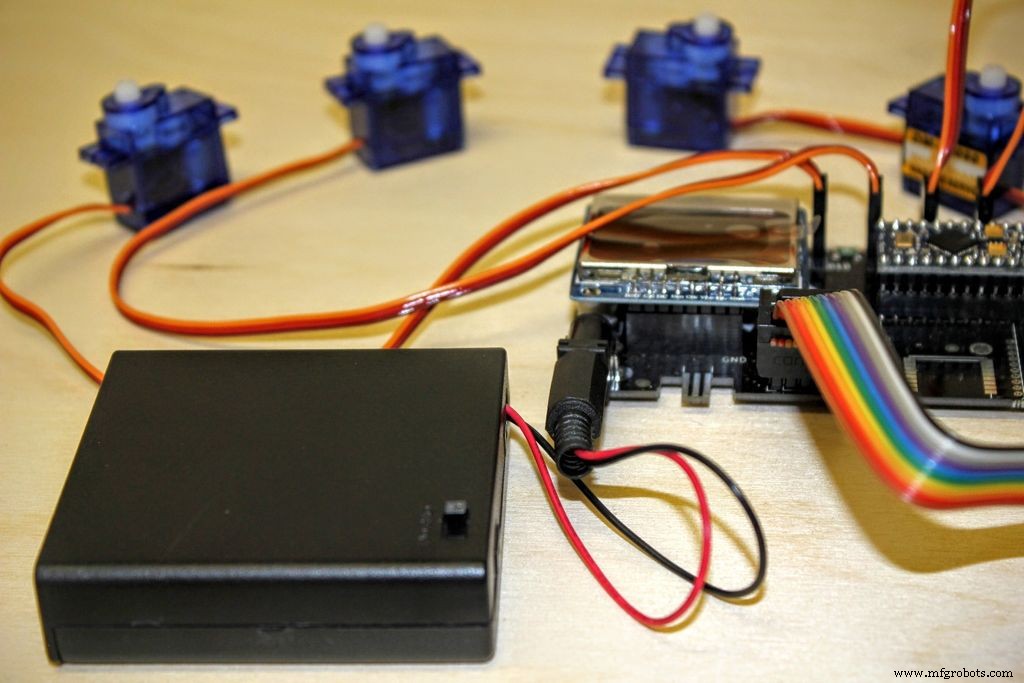
Jika Anda menggunakan dan Arduino maka pengaturan yang ditunjukkan pada gambar di atas dan kode ini akan memberi Anda hasil yang sama. Kami menggunakan Codebender untuk kode demo kami dan akan menyukai tshirt. Jadi silakan gunakan tautan ini jika Anda akan membuka akun.
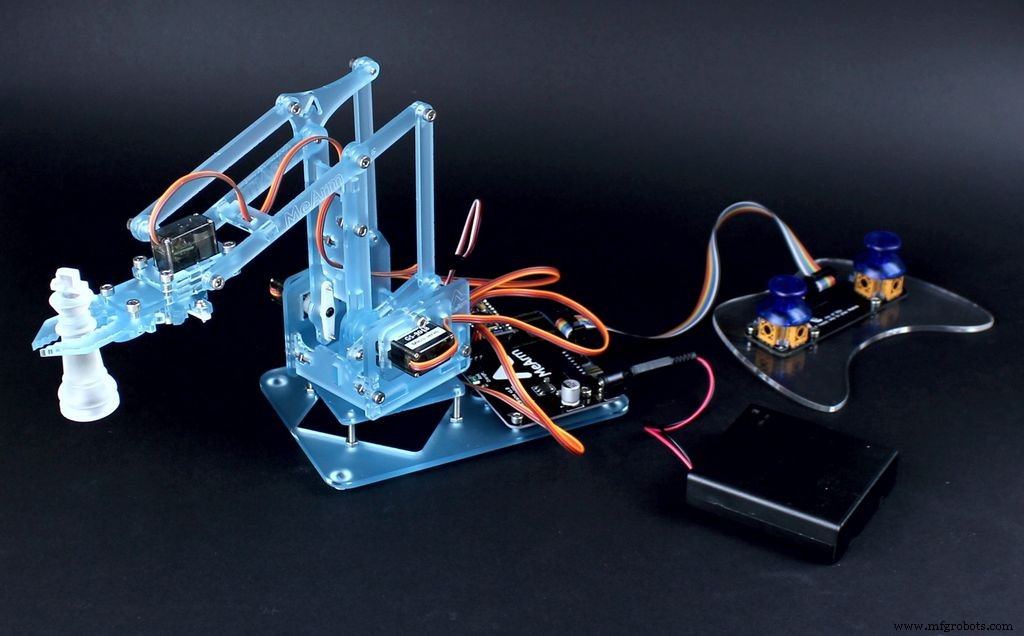
Bagian terpenting yang harus disadari dalam menyiapkan servos Anda adalah bahwa Anda tidak dapat memberi daya melalui mikrokontroler Anda. Anda memerlukan catu daya 5-6V 2A terpisah, dengan landasan yang sama untuk pengontrol mikro. Lihat gambar pengaturan Arduino untuk info lebih lanjut.
Langkah 3:Ayo! 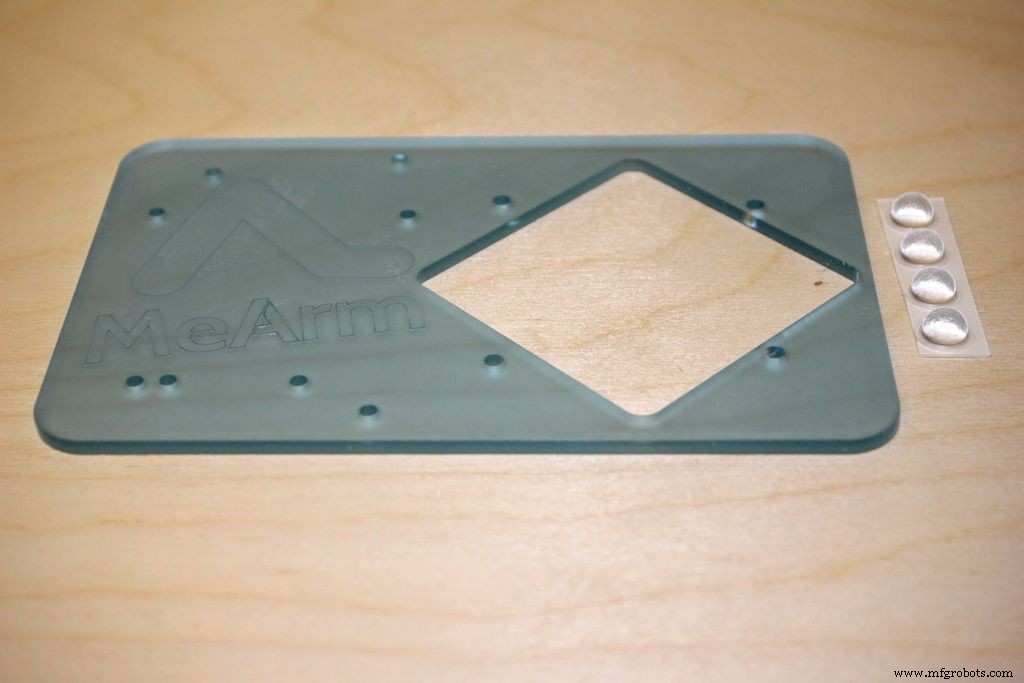
Dengan servos Anda yang dikalibrasi, kita bisa mendapatkan keretakan. Secara harfiah jika Anda memiliki salah satu paket snap out kami!
Anda mungkin harus meluangkan waktu untuk melepas lapisan pelindung pada potongan akrilik. Anda dapat melakukannya sambil jalan atau sekaligus. Panggilan Anda.
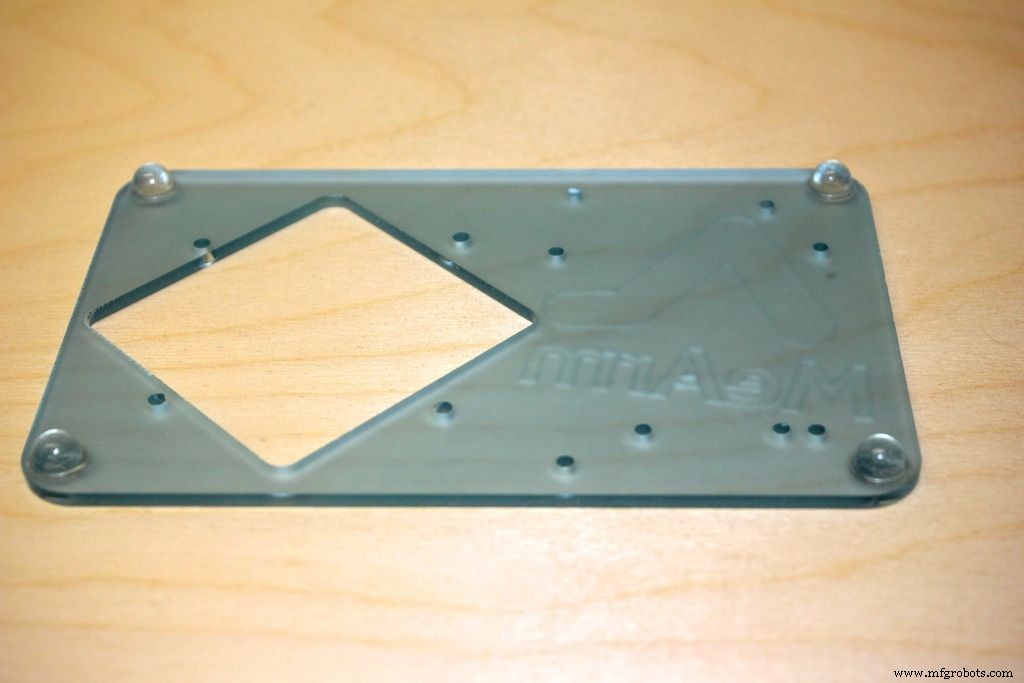
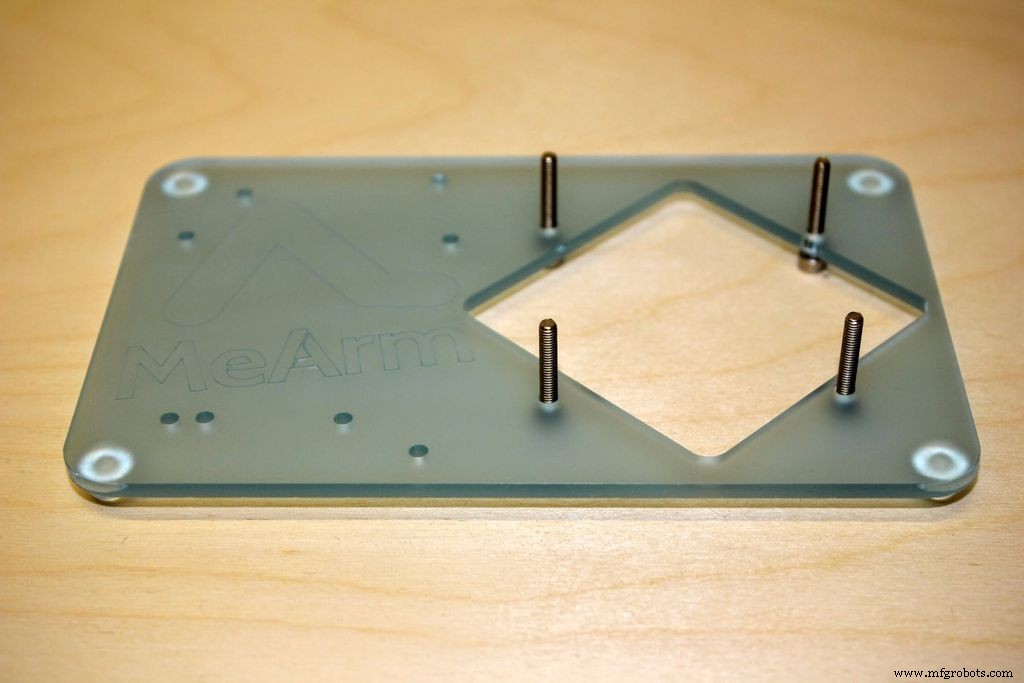
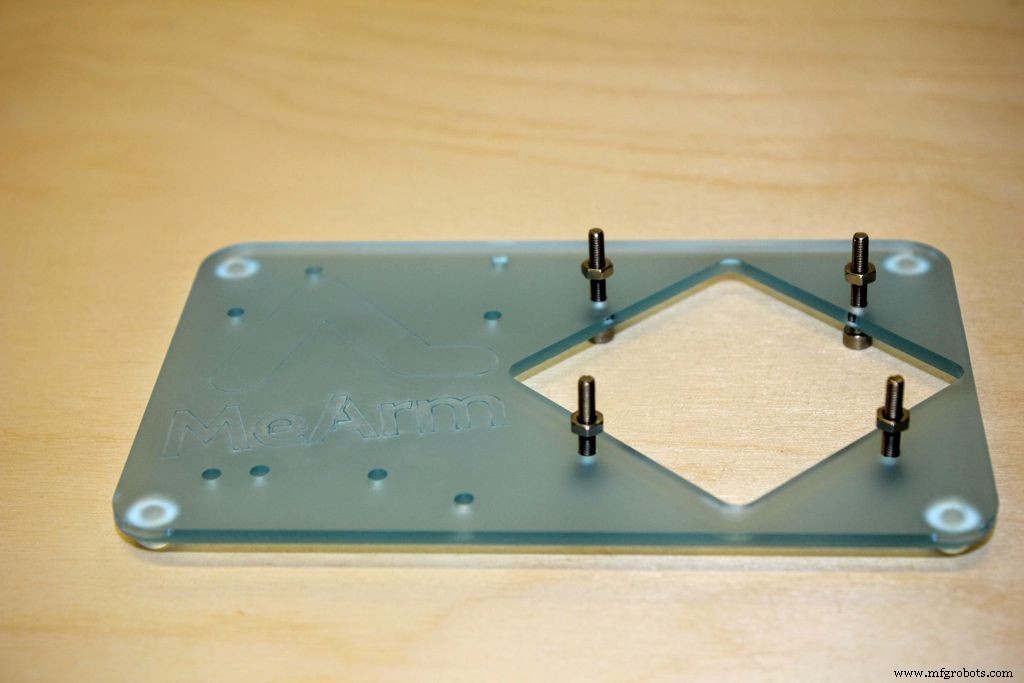
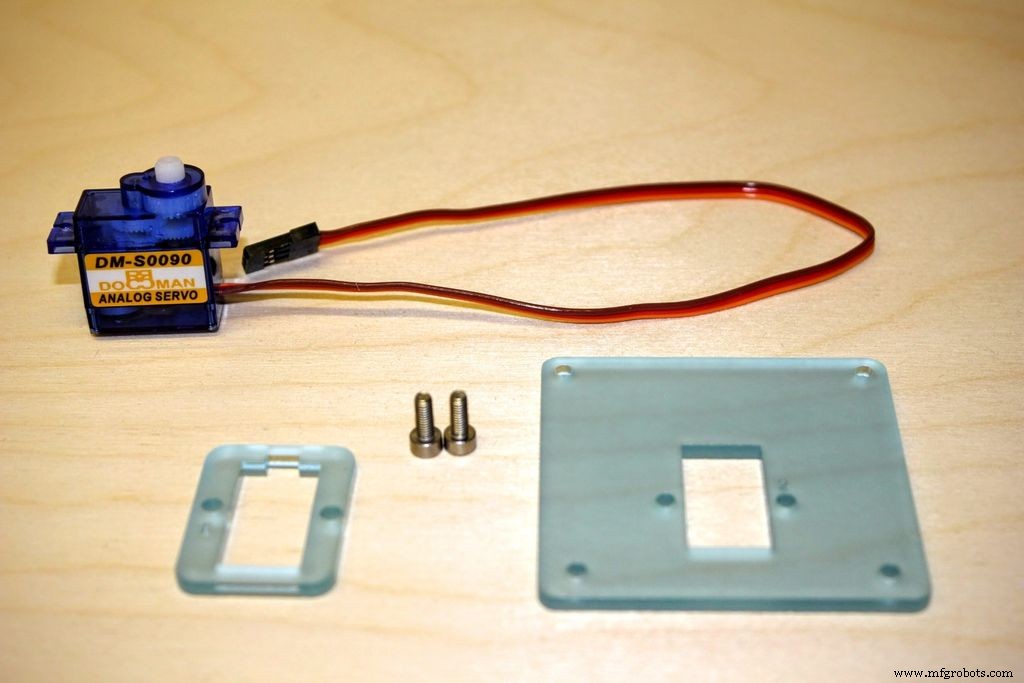
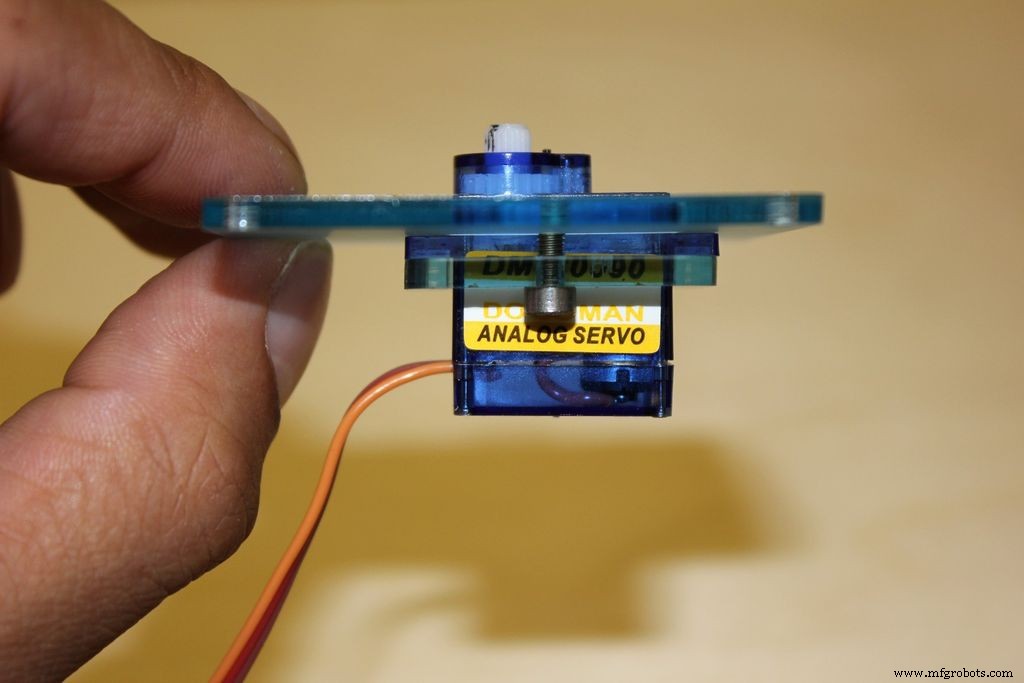
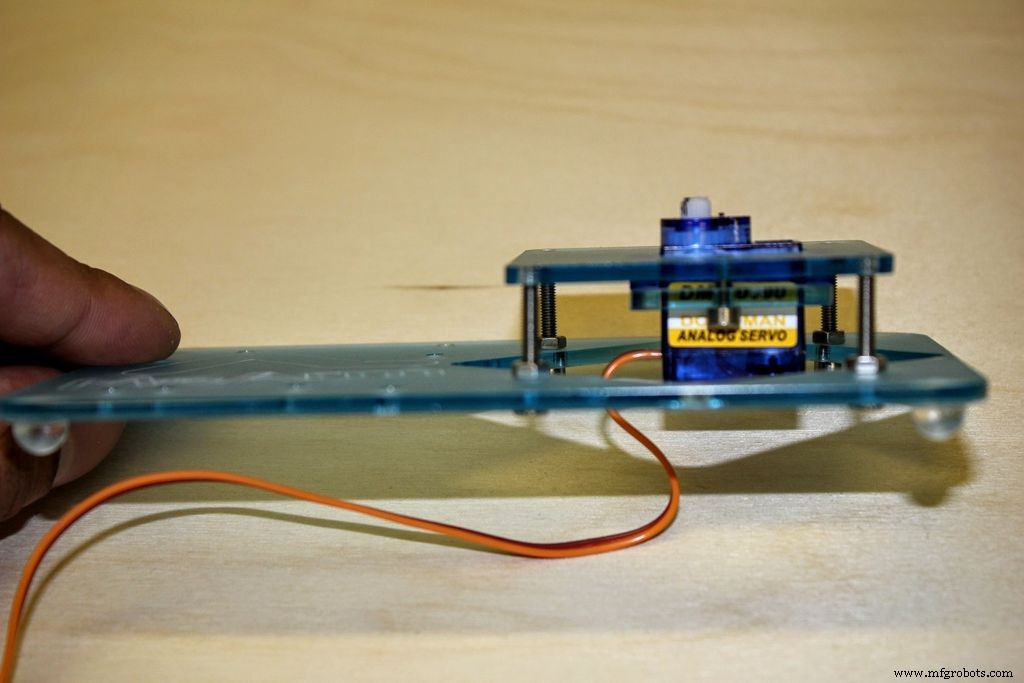
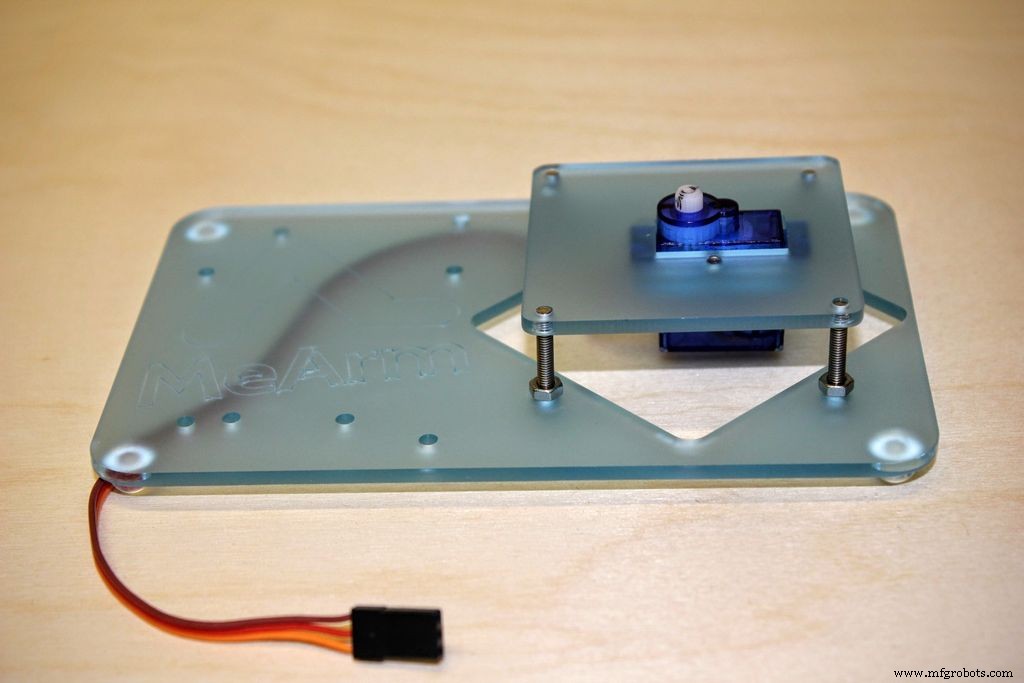
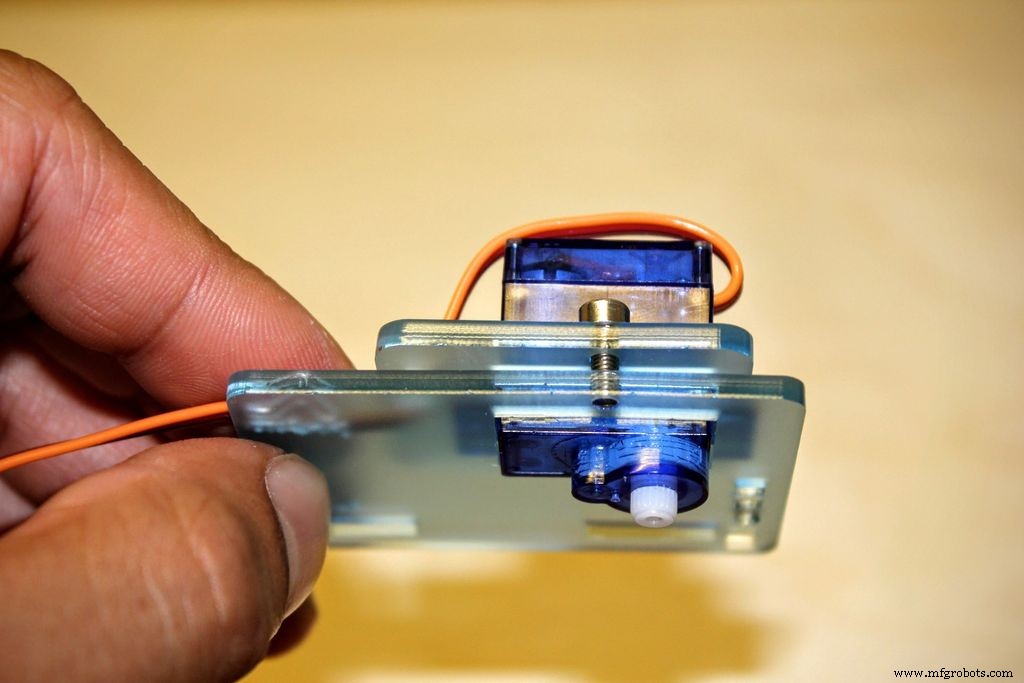
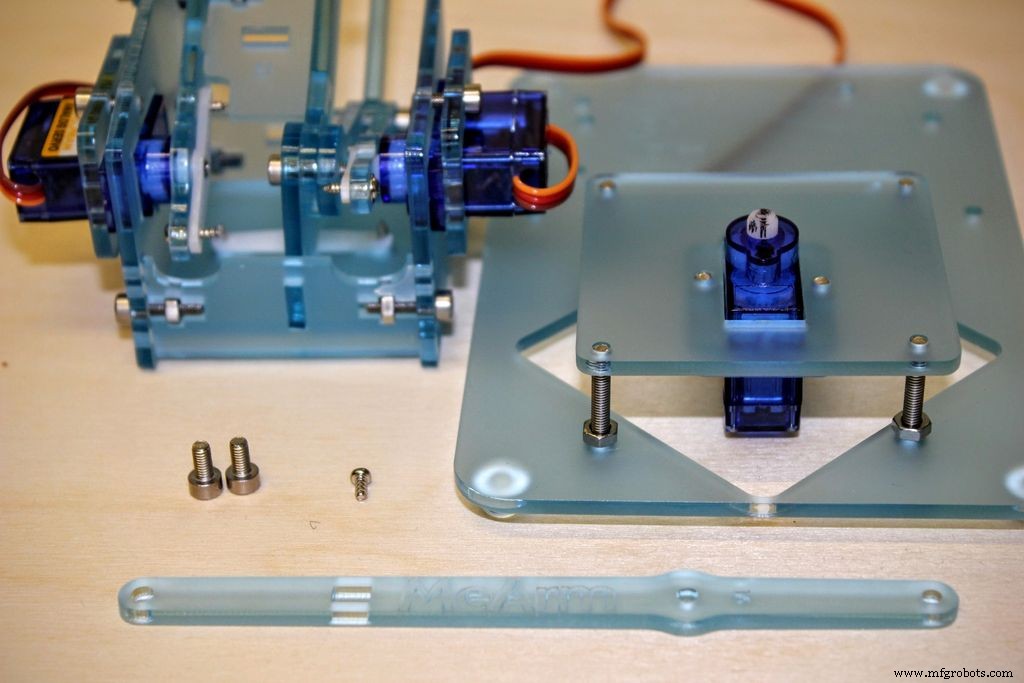
Temukan bagian terbesar (#1) dan tempelkan kaki bantalan lengket ke sudutnya. Kemudian masukkan empat sekrup 20mm dari bagian bawah dan kencangkan empat mur di tengahnya. Sekarang temukan bagian #2, #3, servo tengah Anda, dan dua sekrup 8mm. Masukkan servo melalui bagian # 3, yang kami sebut kerah. Dorong sekrup melalui kerah lalu kencangkan ke bagian #2.
Sekrup itu sendiri masuk ke bagian #2, ini berarti mereka memotong ulirnya sendiri. Di MeArm ada dua ukuran lubang satu di sekitar 3mm di mana Anda dapat mendorong sekrup melalui dan yang lainnya sekitar 2,6mm di mana kita ingin sekrup untuk self tap. Ini adalah metode yang kami pinjam dari PlotClock yang luar biasa oleh Joo.
Sekarang kami memasang rakitan servo / kerah ke bagian # 1 melalui sekrup 20mm, ini akan mengetuk sendiri dan orientasi lubang pada bagian harus berarti Anda tidak bisa melakukannya dengan cara yang salah. Ini disebut Poka-yoke dan merupakan metode untuk desain pemeriksaan yang bodoh. Jika Anda memiliki model awal v1.0, Anda akan melihat upaya saya ini terlalu bersemangat karena hanya ada 1/8 cara untuk memperbaikinya (jika Anda tidak dapat mencocokkan lubang, balikkan bagiannya). Versi selanjutnya disesuaikan dengan saran Scott Pierce dan memiliki 1/2 cara.
Langkah 4:Sisi Kiri 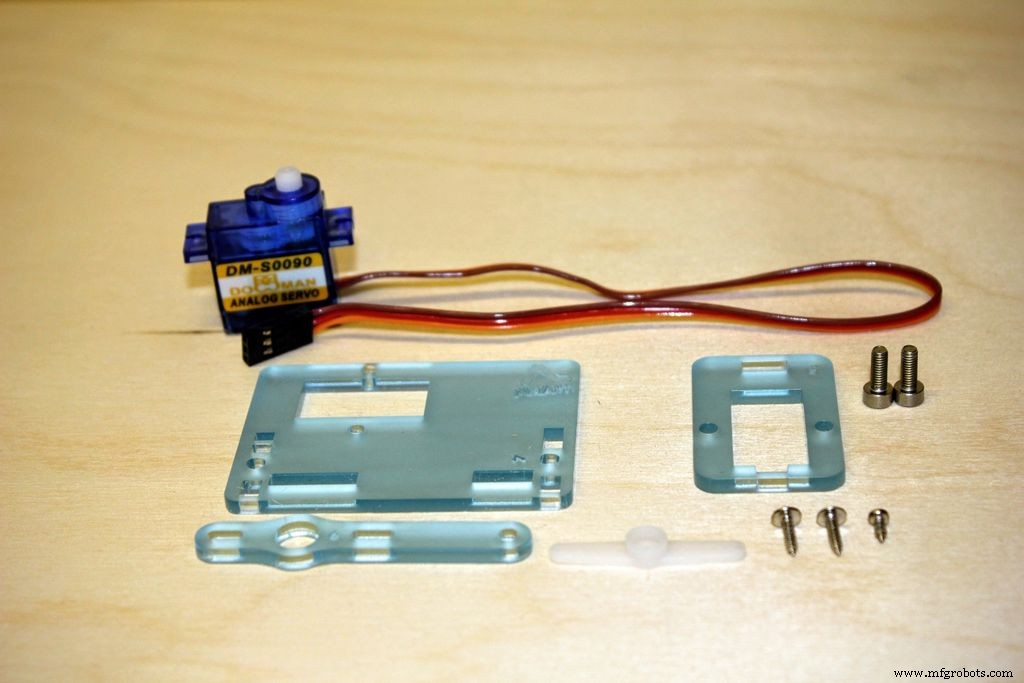
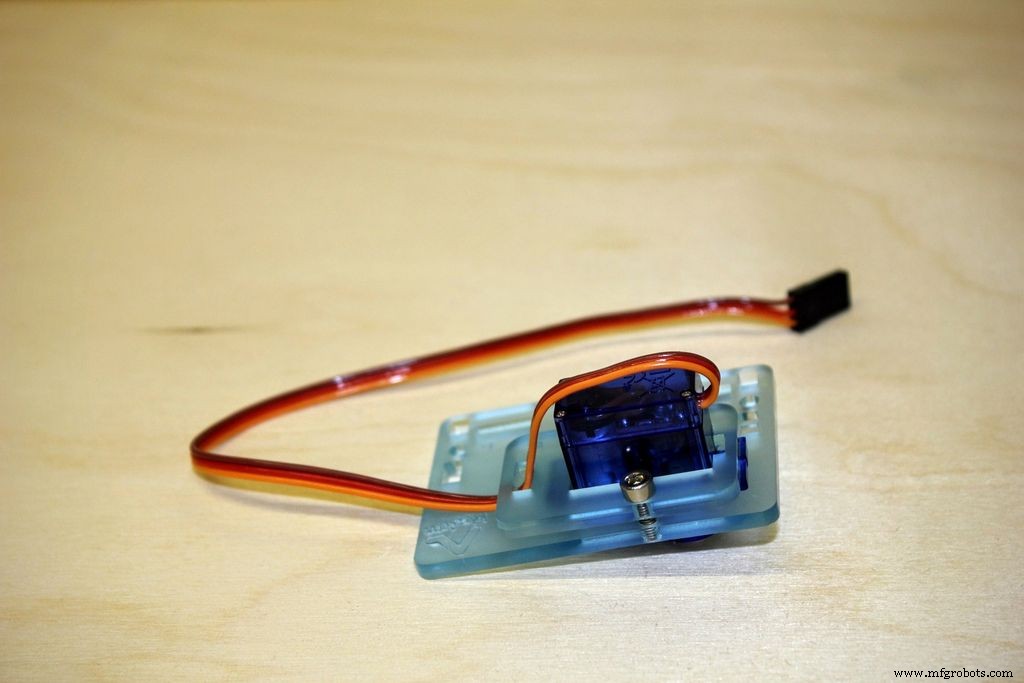

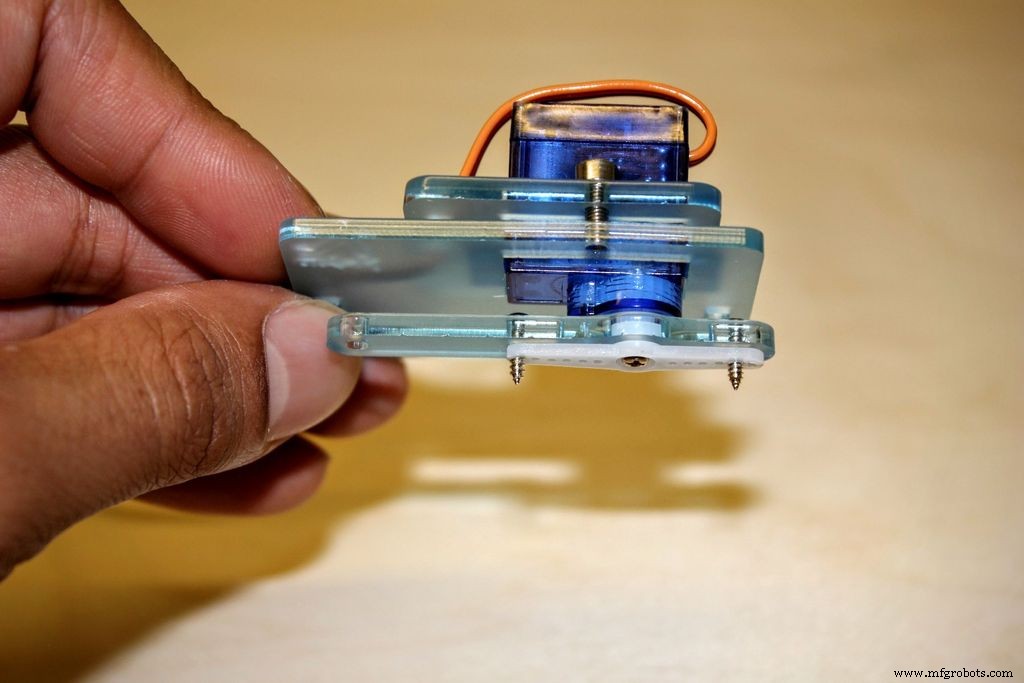
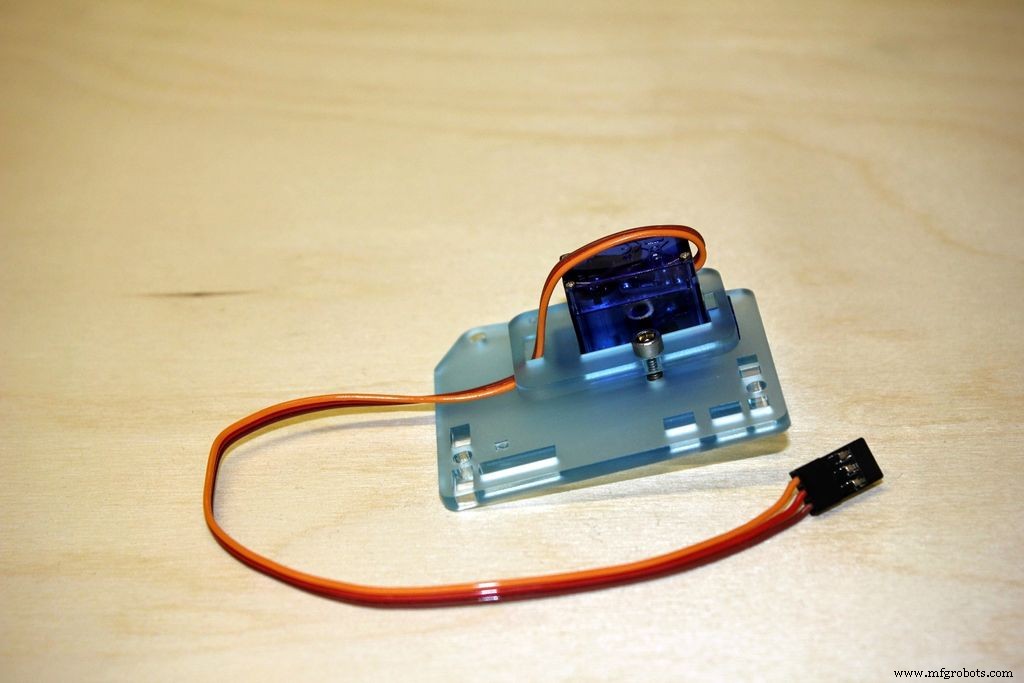
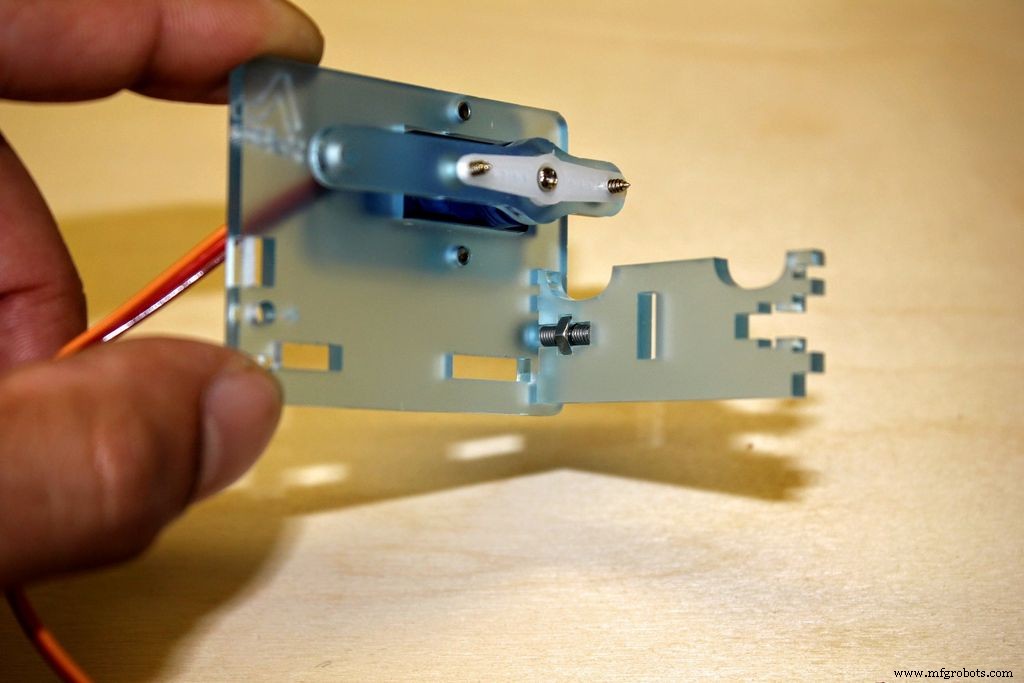
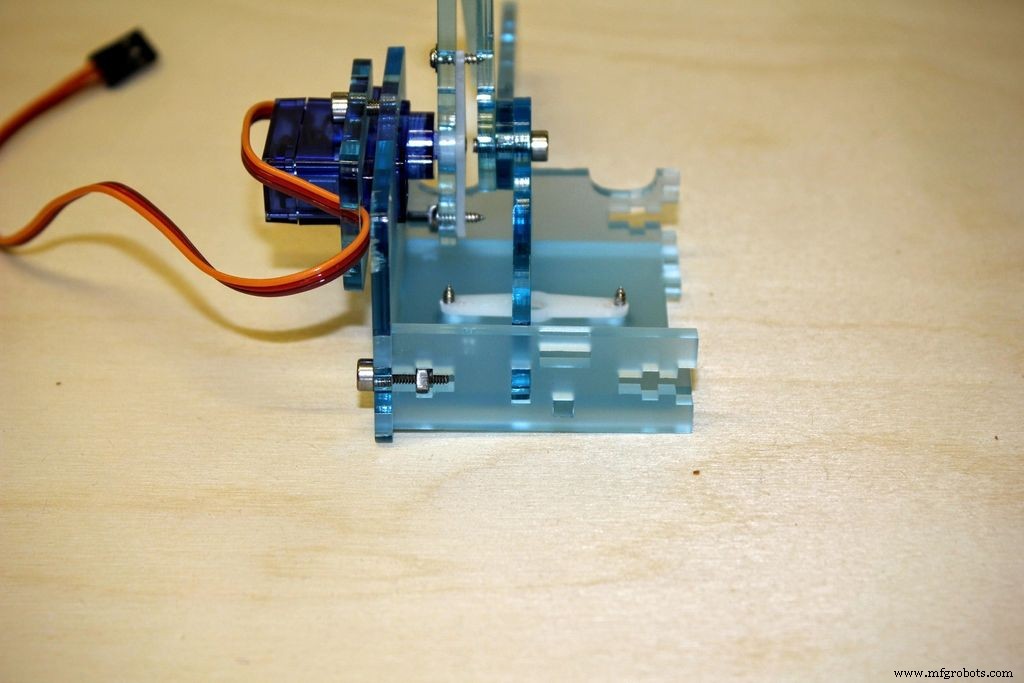
Sekarang temukan bagian #4, #5, #6, servo kiri, dua sekrup 8mm, dan paket pemasangan servo.
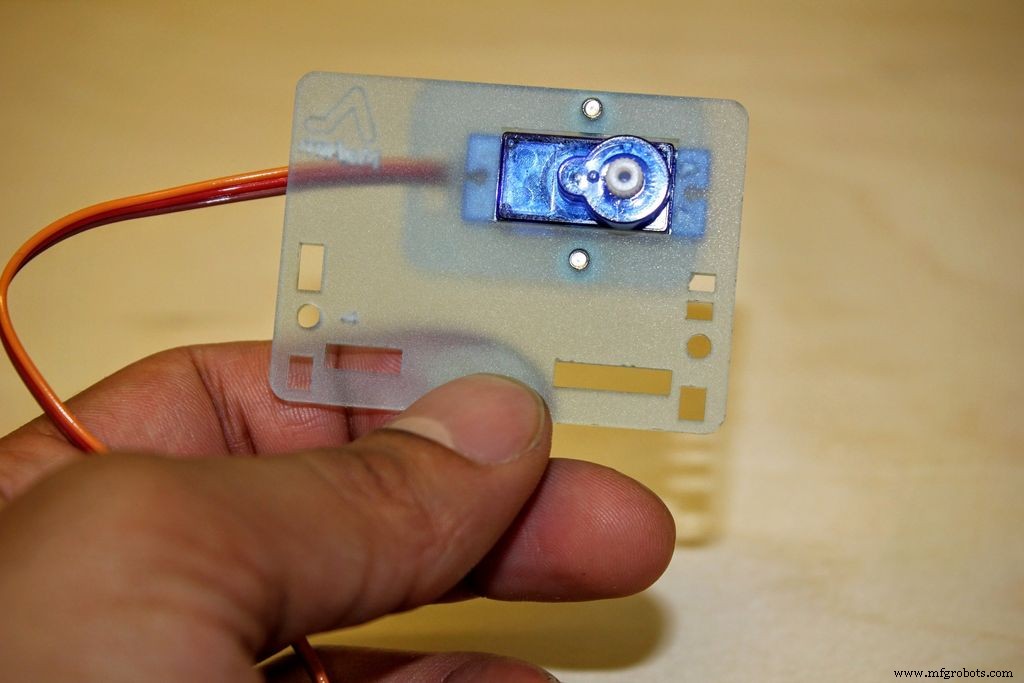
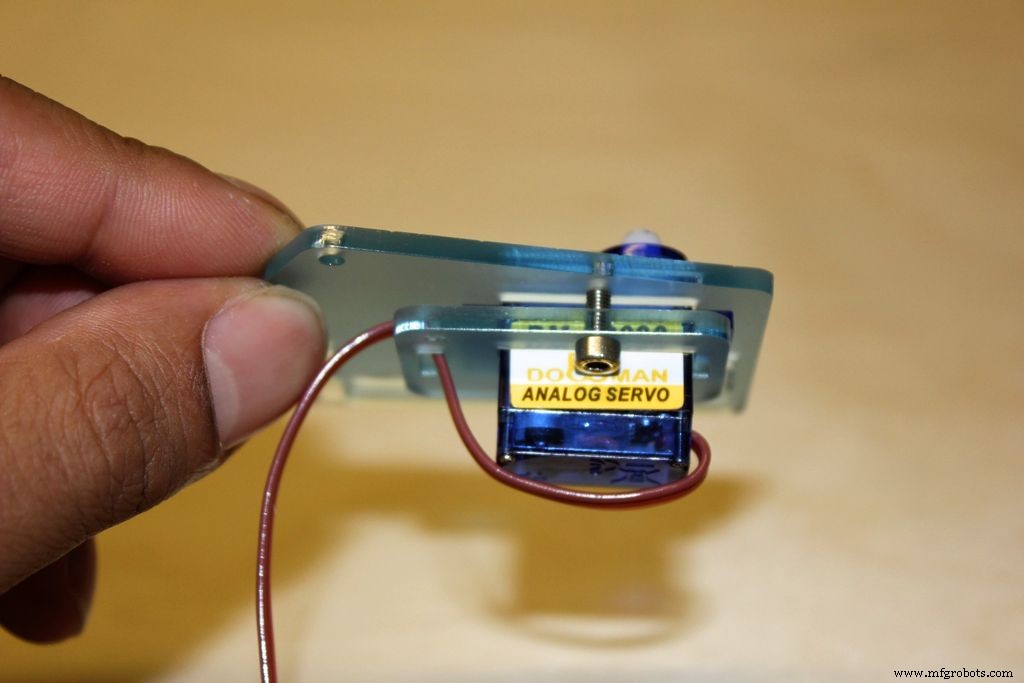
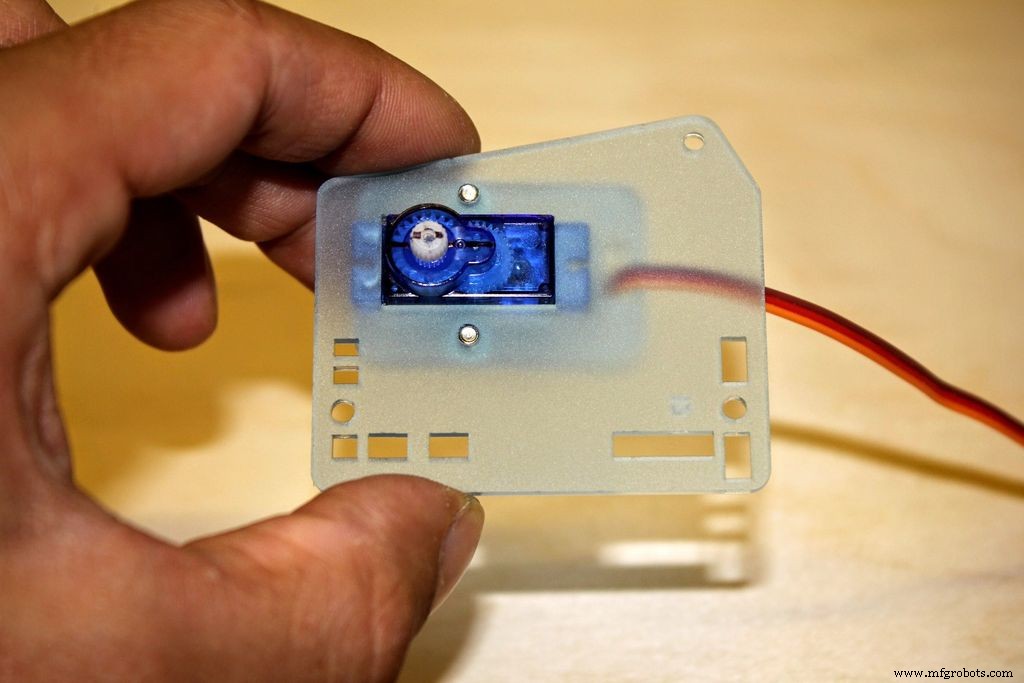
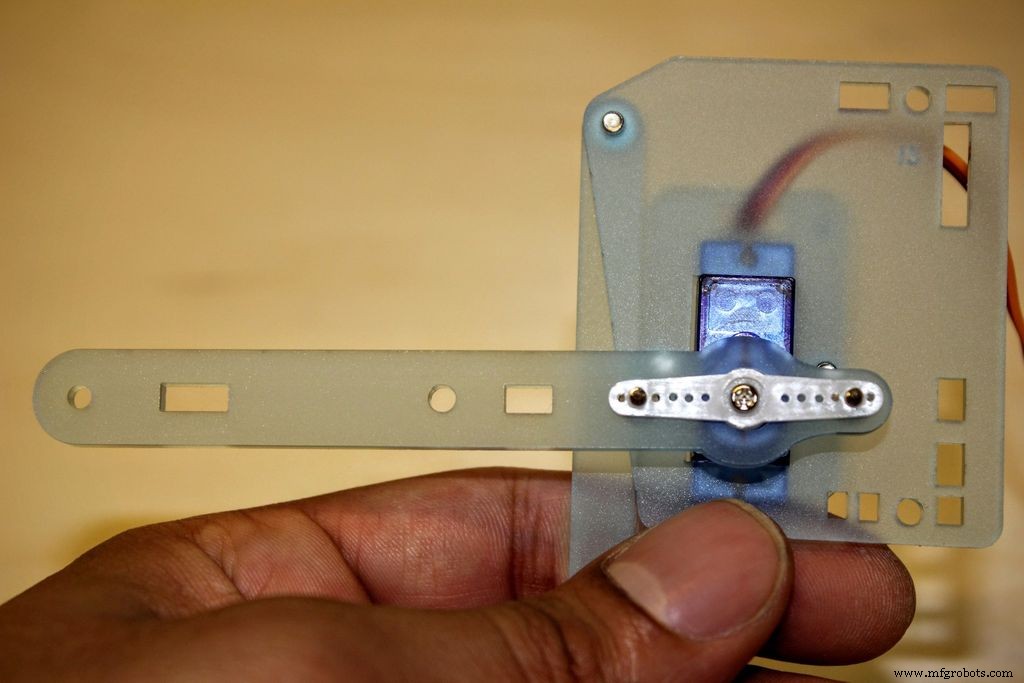
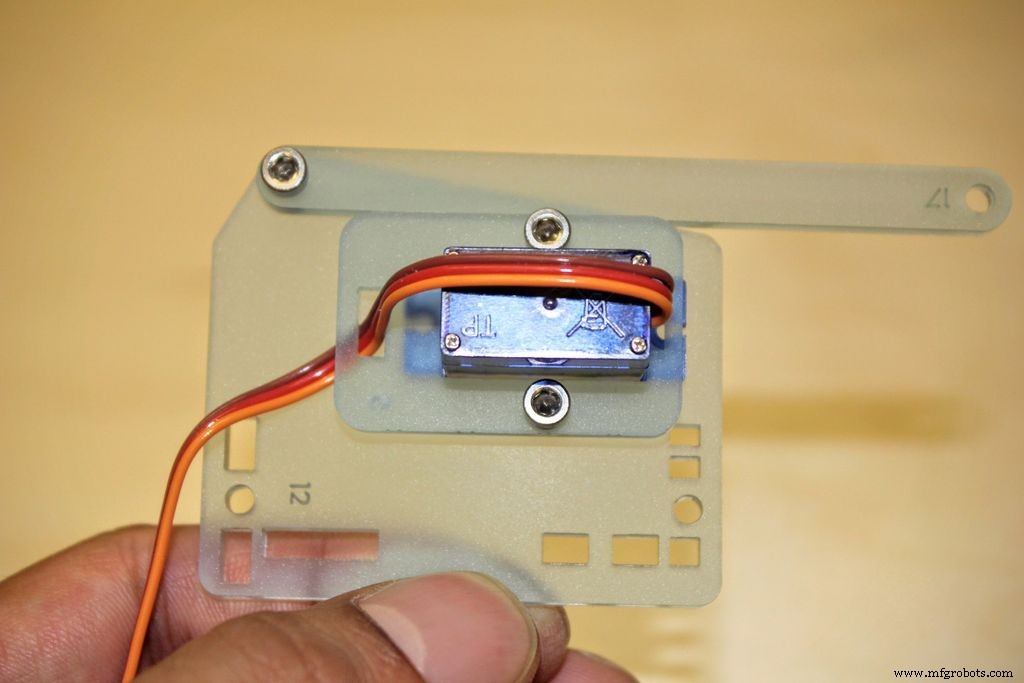
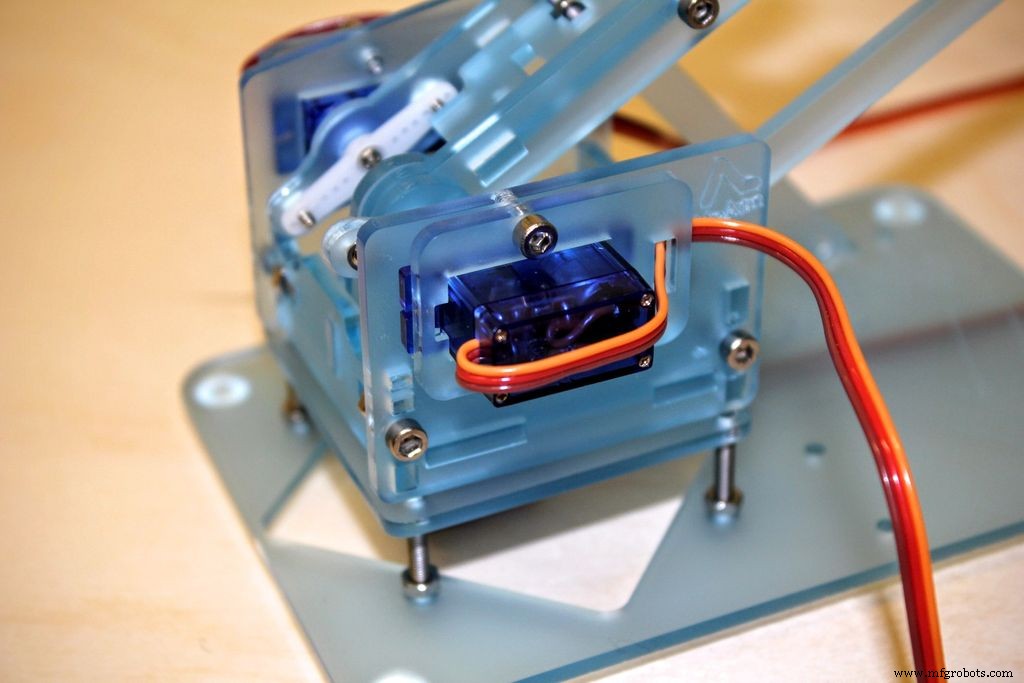
Masukkan servo melalui kerah (bagian #5) dan kemudian kabel servo melalui lubang rapi kabel. Pasang kerah ke bagian #4 menggunakan sekrup 8mm berhati-hatilah agar tidak terlalu kencang . Anda tidak ingin akrilik bengkok, cukup pegang servo di tempatnya.
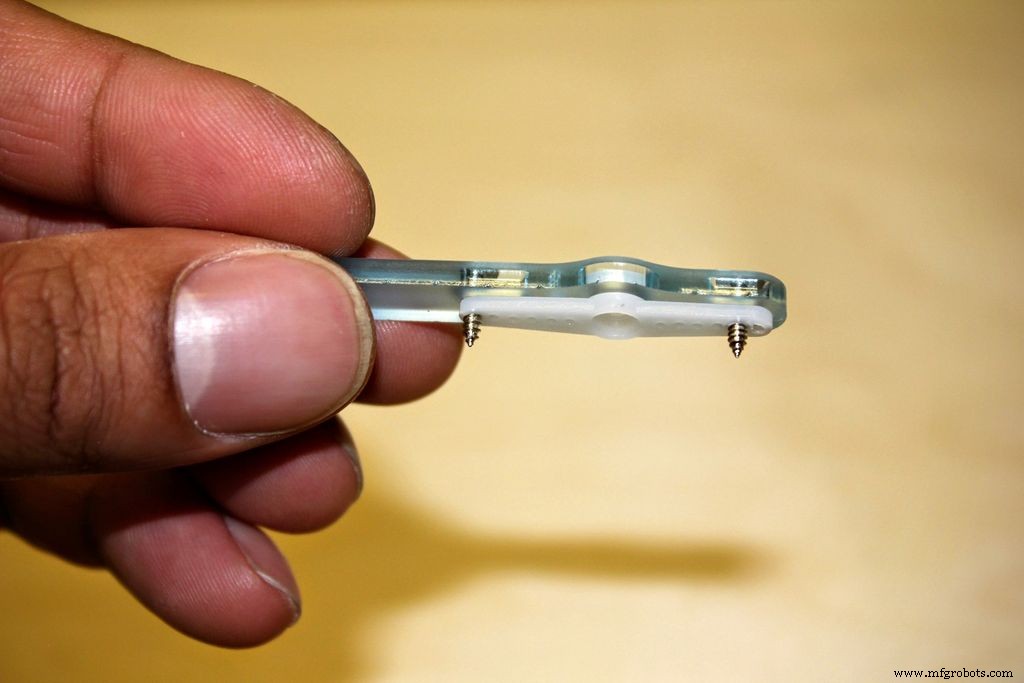
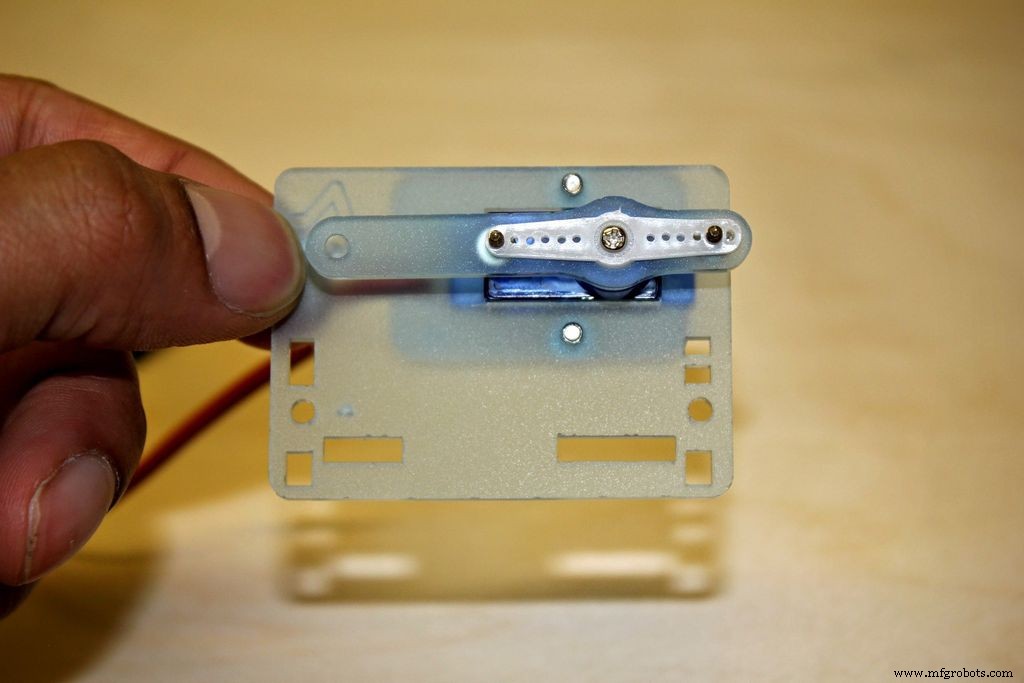
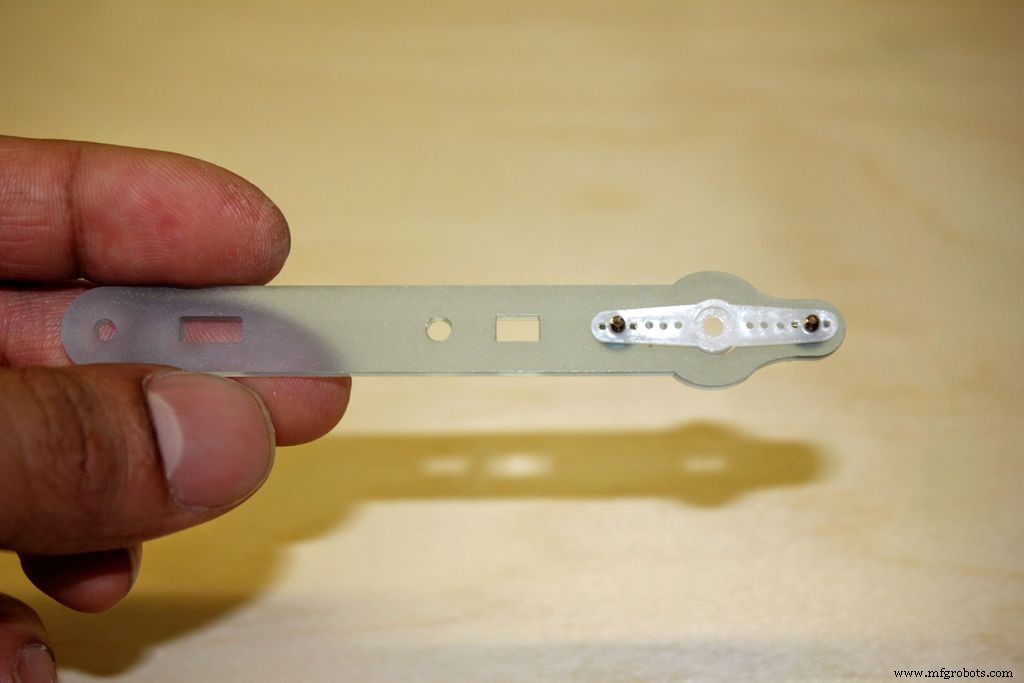
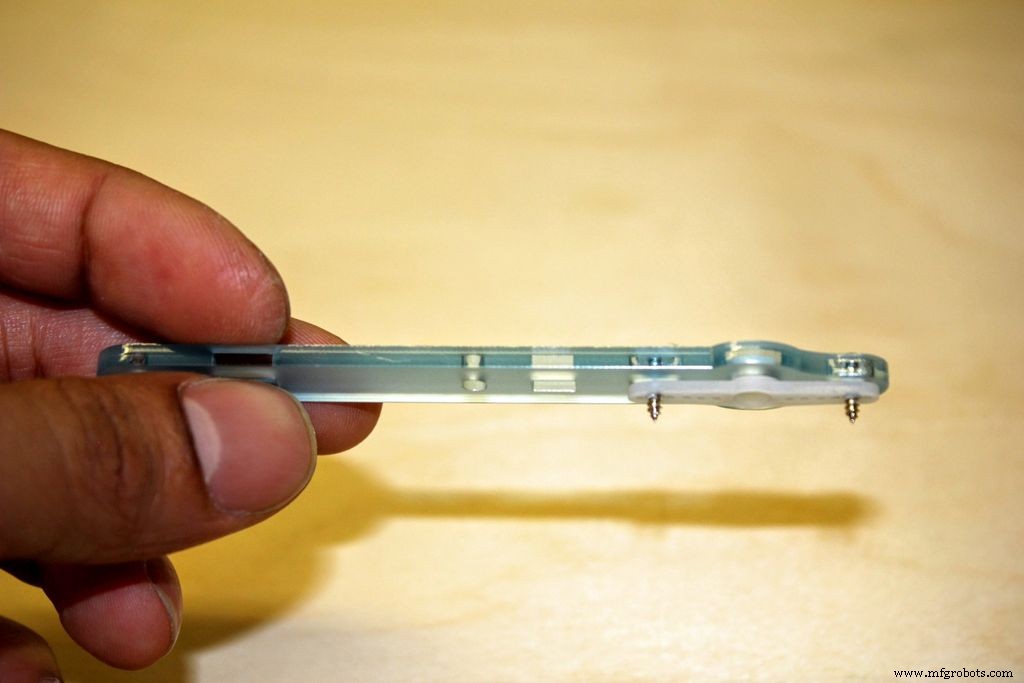
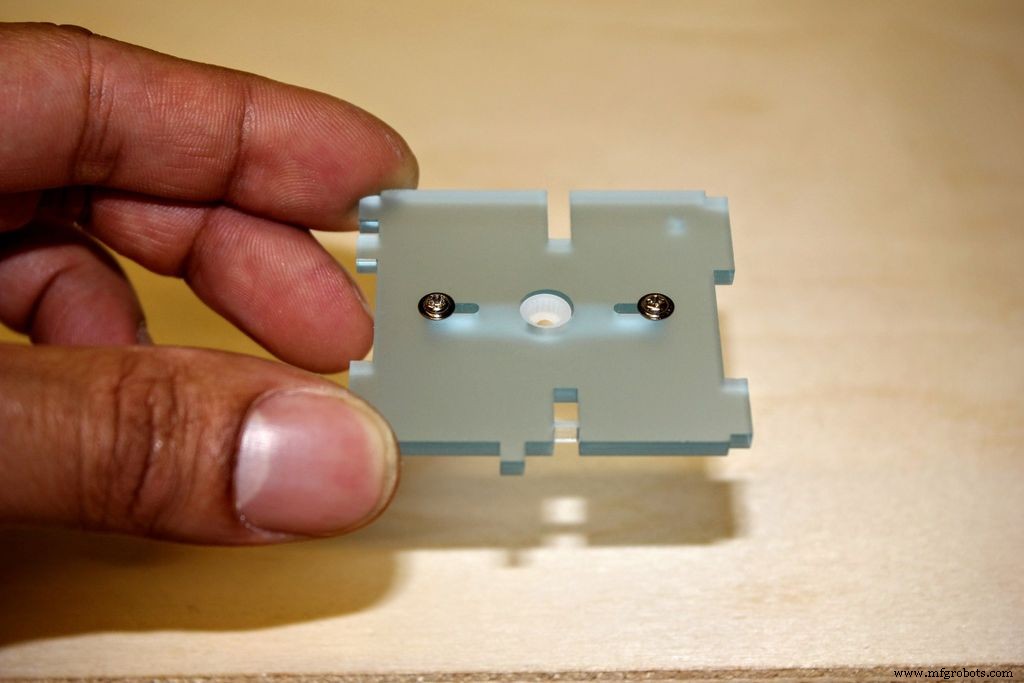
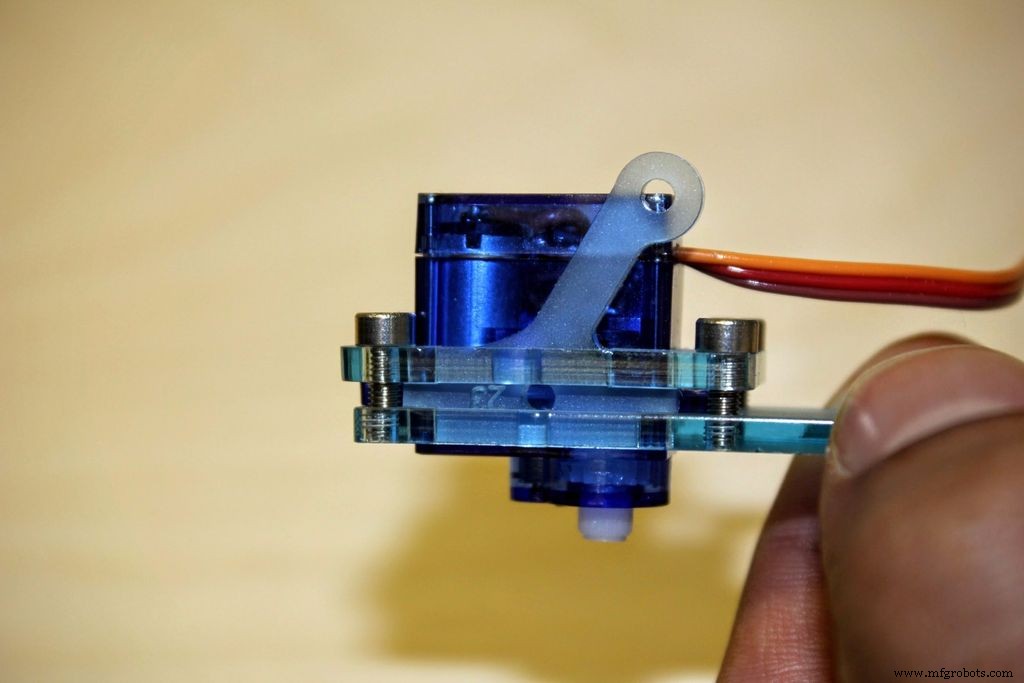
Sekarang pasang servo fixing (benda putih, mereka disebut tanduk) ke lengan servo (#6) menggunakan sekrup tajam dari paket fixing servo. Ini akan masuk sendiri ke tanduk servo plastik putih. Mereka bisa sedikit rumit jadi harap berhati-hati di sini. Jika Anda membangun dengan seorang anak, inilah saatnya Anda ingin terlibat.
Pasang servo fixing ke servo terkalibrasi Anda seperti yang ditunjukkan, itu harus sejajar dengan sisi terpanjang dari bagian #4 dan garis yang Anda gambar sebelumnya harus tetap cocok. Menggunakan sekrup mesin kecil dari paket servo, kencangkan ke servo tetapi sekali lagi jangan terlalu kencang!
Langkah 5:Sisi Kanan 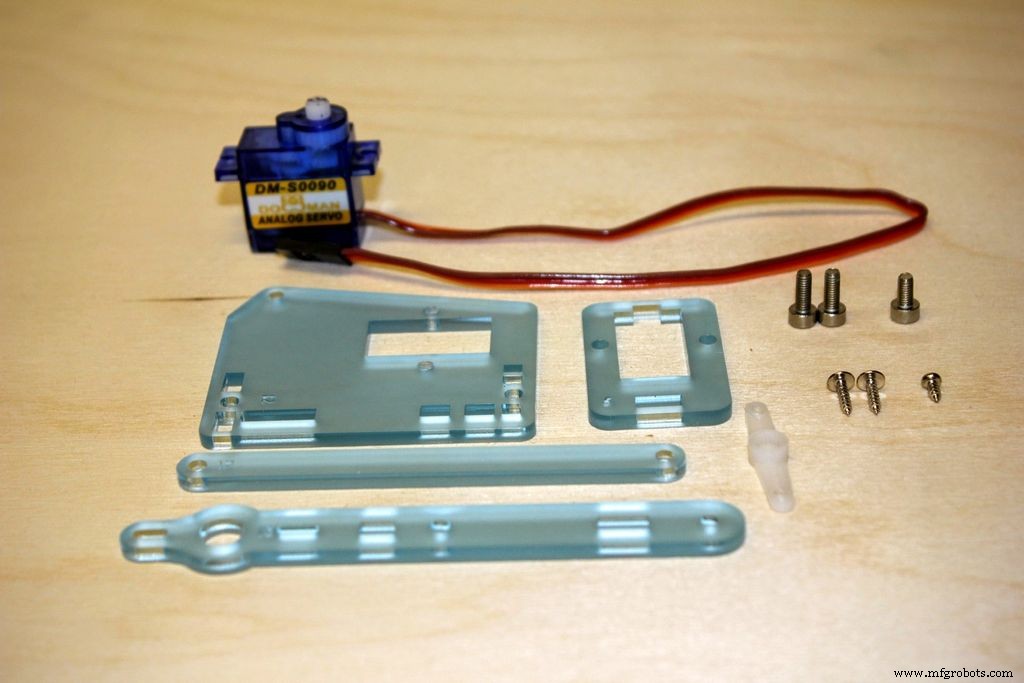
Bagian yang kita inginkan di sini adalah:
#5, #12, #13, #17, dua sekrup 8mm, sekrup 6mm, servo kanan, dan paket pemasangan servo.
Masukkan servo melalui kerah dan kabel melalui kabel rapi seperti sebelumnya pasang ke pelat samping dengan sekrup 8mm, sekali lagi berhati-hatilah agar pelat tidak patah karena terlalu kencang. Pasang tanduk servo putih ke lengan servo (#13) menggunakan sekrup tajam seperti sebelumnya. Pasang ini ke servo dengan lengan pada 90 derajat ke sisi terpanjang pelat samping. Sekali lagi garis hitam yang Anda buat harus berbaris.
Terakhir pada tahap ini pasang part #17 ke side plate menggunakan sekrup 6mm.
Langkah 6:Bangun bagian tengah 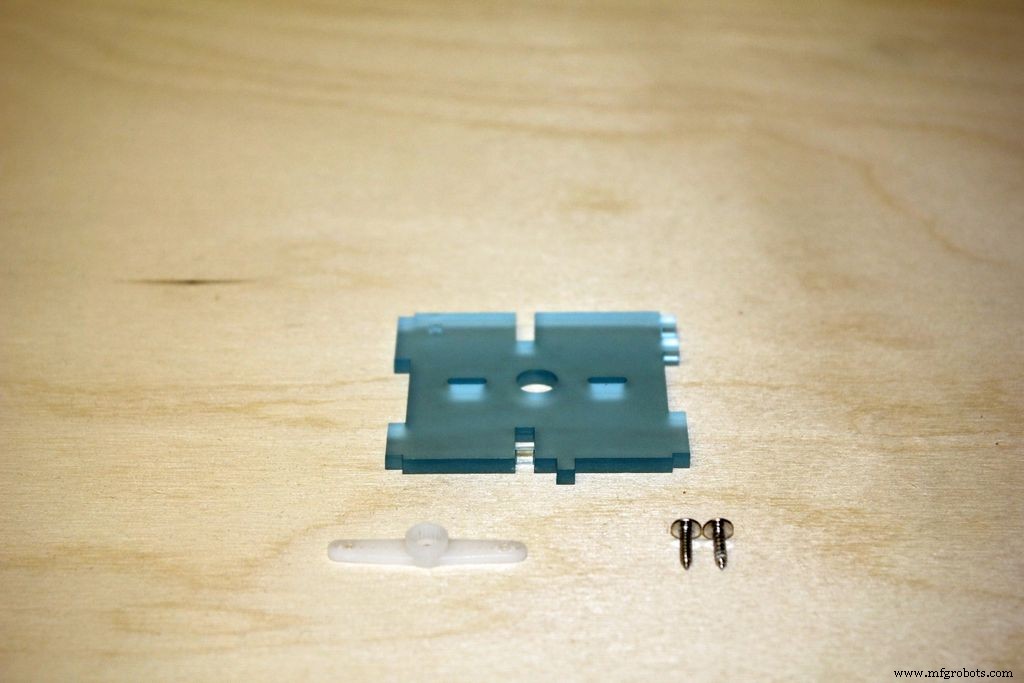
Bagian-bagian ini bergabung dengan bagian kiri dan kanan bersama-sama. Kami menyebutnya dasar dan babi.
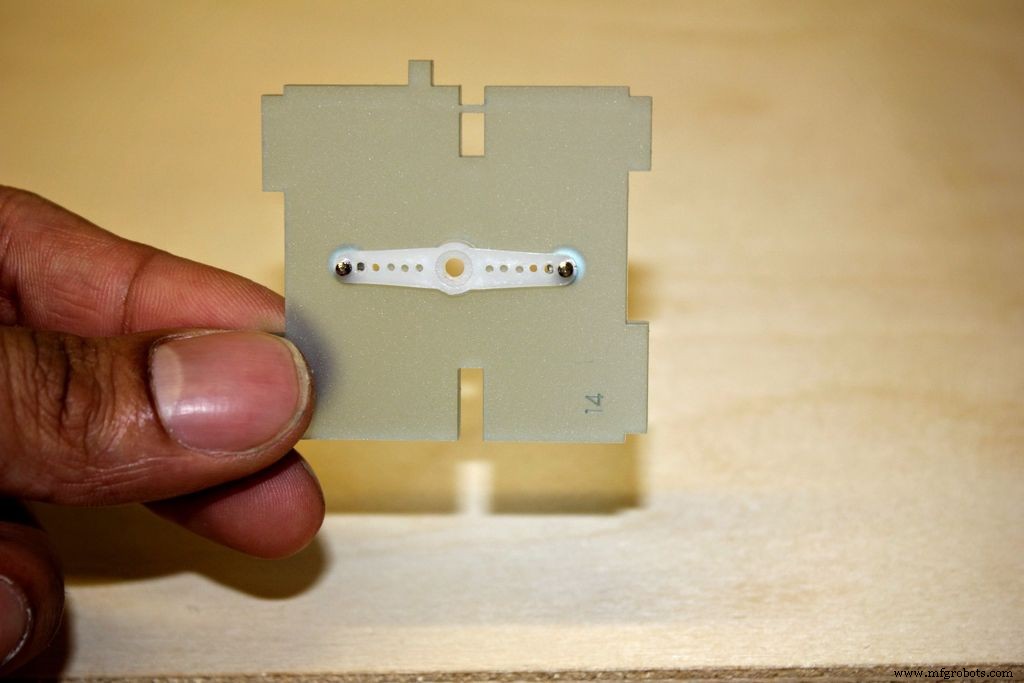
Untuk alas, temukan bagian #14 dan paket perbaikan servo. Perhatikan dengan hati-hati orientasi pasang tanduk servo menggunakan sekrup tajam. Pada tahap ini, tawarkan ke bagian sisi kiri untuk melihat apakah Anda sudah melakukannya dengan benar. Poka-yoking seharusnya menunjukkan jalan ke sini.
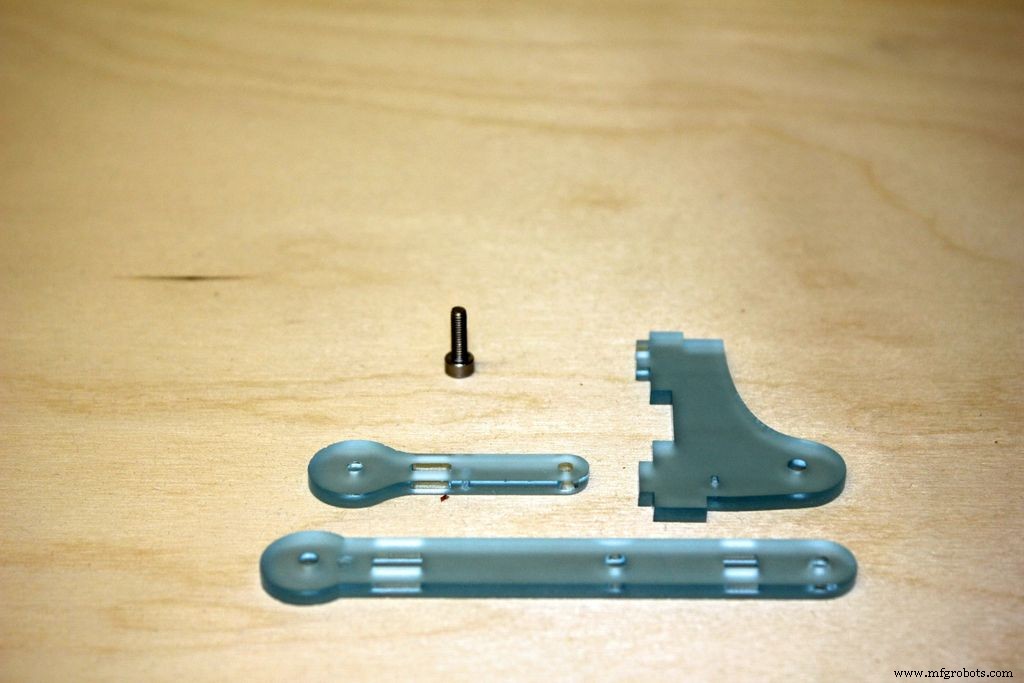
Untuk babi temukan bagian #8, #9, #10 dan sekrup 10mm. Kencangkan keduanya dalam urutan yang ditunjukkan, yang seharusnya #9, #10, #8 dengan sekrup masuk dari sisi #8 dan menekan sendiri ke #9. Maaf urutannya membingungkan, tapi jujur ini pertama kalinya saya menuliskannya dengan angka! Sangat penting bahwa ini bergerak di sekitar sumbu (sekrup) di jalur yang lurus dan mereka bergerak bebas. Jika tidak bergerak di jalur yang lurus, buka, pegang, dan kencangkan lagi sehingga semuanya sejajar.
Langkah 7:Kiri ke tengah 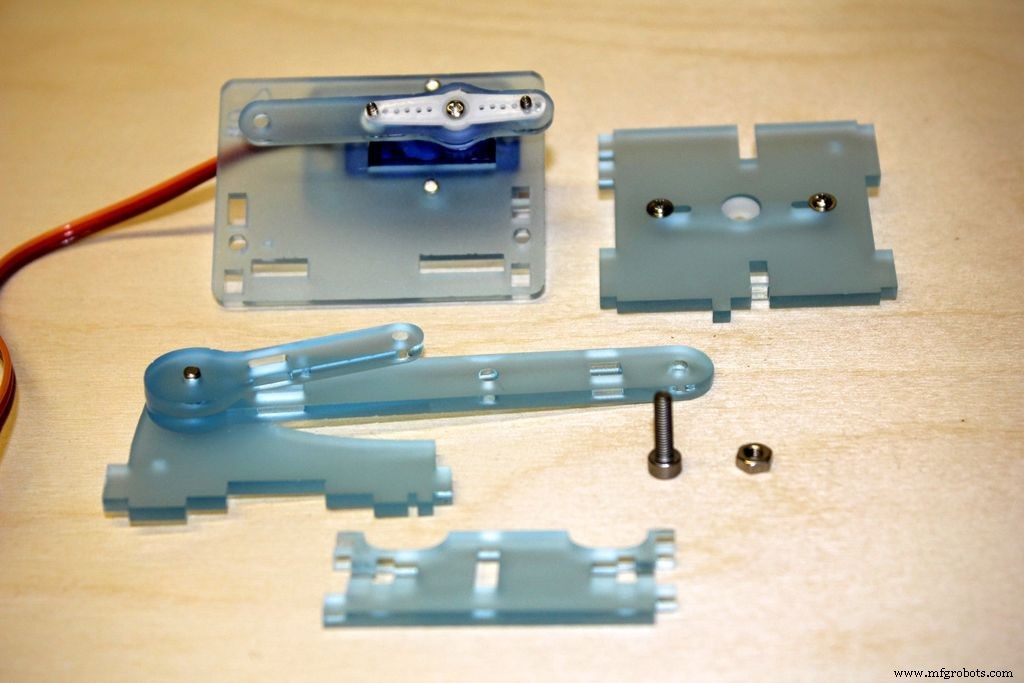
Sekarang kita ingin mulai menyatukan bagian kiri dan kanan menggunakan bagian tengah.
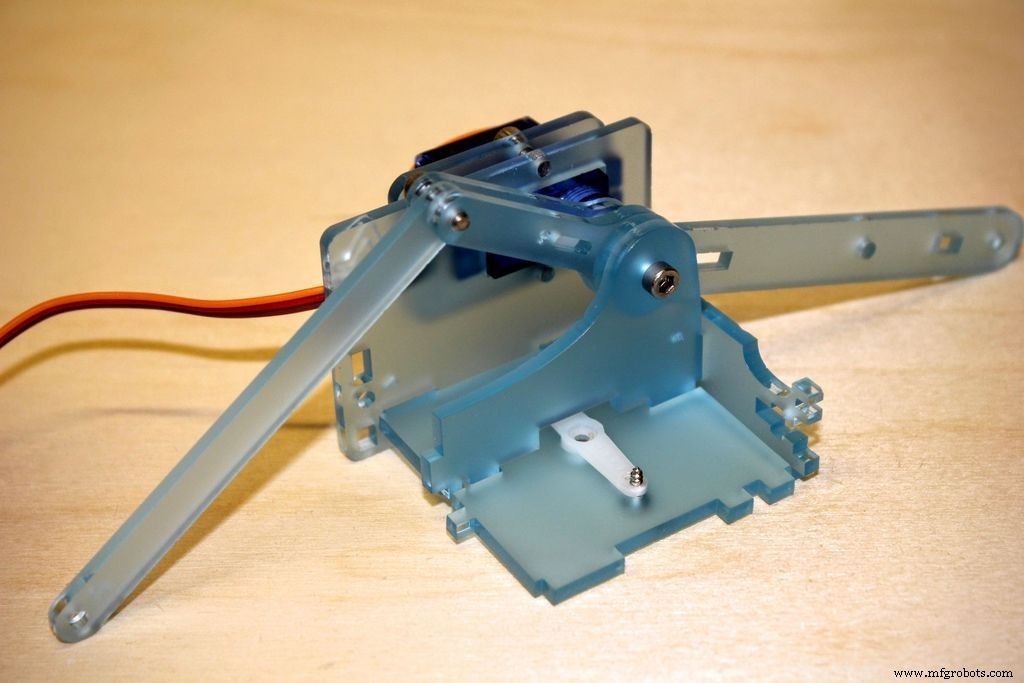
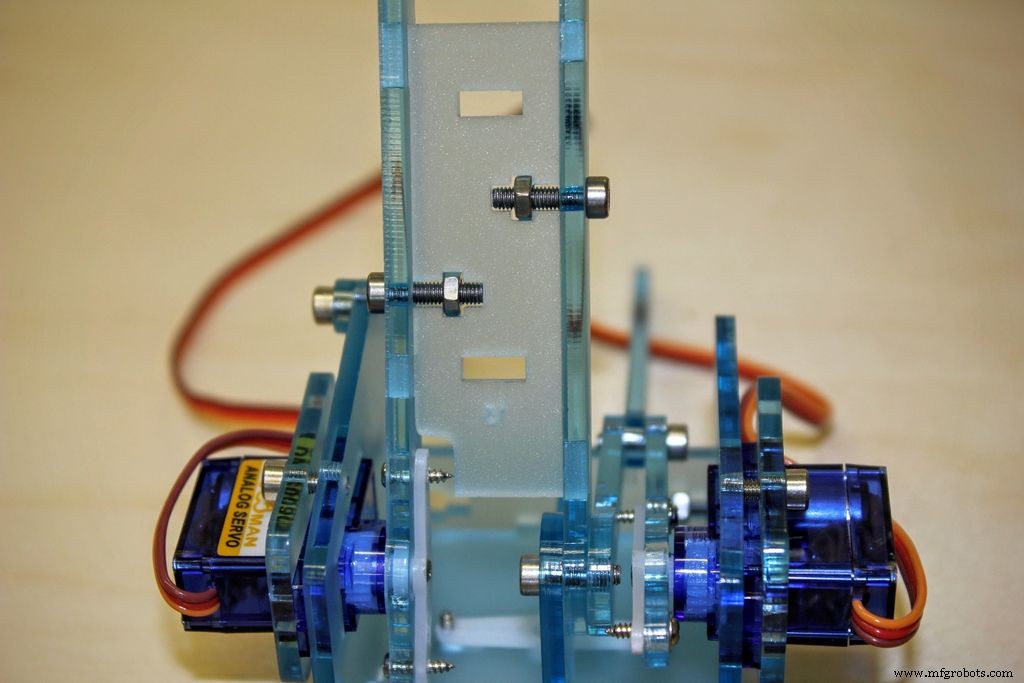
Pertama pasang rakitan kiri ke bagian #7 dengan sekrup dan mur 12mm. Cara termudah untuk melakukannya adalah dengan mendorong sekrup 12mm melalui rakitan kiri dan memasang mur setengah putaran atau lebih. Letakkan slot di bagian #7 di atas mur dan mulailah mengencangkan sekrup. Jangan terlalu kencang.
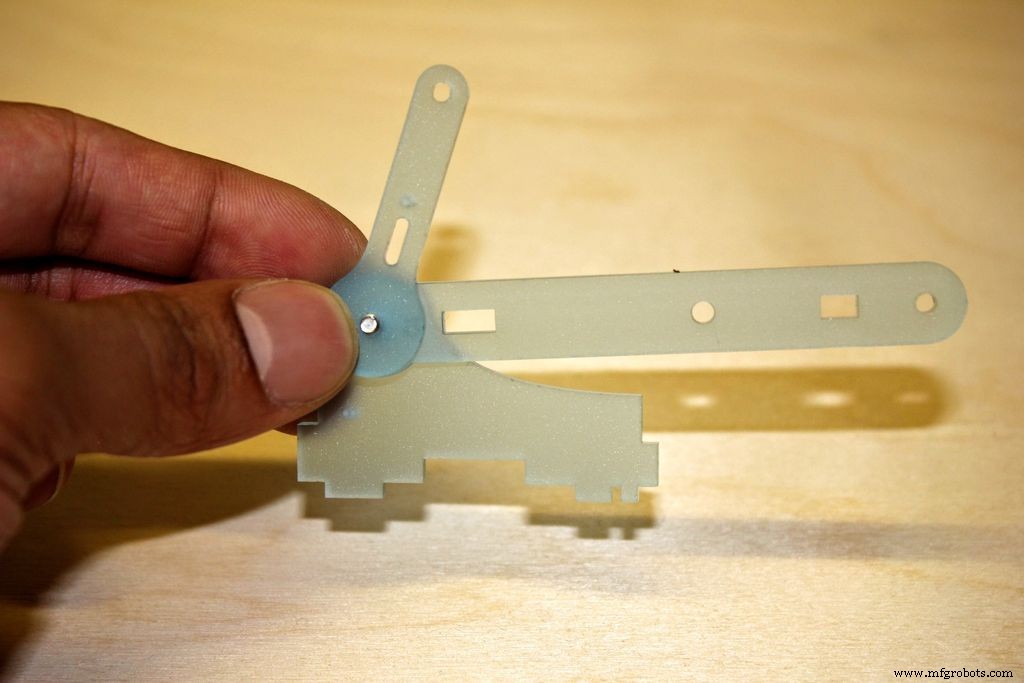
Anda akan melihat slot untuk pig di bagian #7 (penopang depan). Tempatkan pig ke dalam slot kemudian masukkan bagian dasar ke dalam slot di rakitan kiri dan tuas ke atas untuk bergabung dengan slot pada pig. Periksa kembali klakson servo di sini, jika Anda membalikkannya, Anda akan sangat kesal nanti.
Dengan pig di tempatnya, Anda dapat memasang tuas (#17), spacer opsional (#20) ke tuas servo (#6) dan tuas pada pig (#9) bersama-sama dengan sekrup 12mm atau 10mm tergantung pada apakah Anda membutuhkan pengatur jarak. Servo Doman yang terlihat di sini tidak memerlukan spacer tetapi servo terbaru yang kami gunakan melakukannya. Ada suku cadang dalam paket kami untuk tujuan ini.
Sekarang pasang strut belakang, part #11 menggunakan sekrup dan mur 12mm seperti pada strut depan. Itu harus ditempatkan di bagian belakang babi dan juga kenop di pelat dasar. Kencangkan ini tetapi biarkan sedikit kendur karena penyesuaian akan berguna saat Anda mengawinkan bagian tangan kanan.
Langkah 8:Lampirkan Kanan 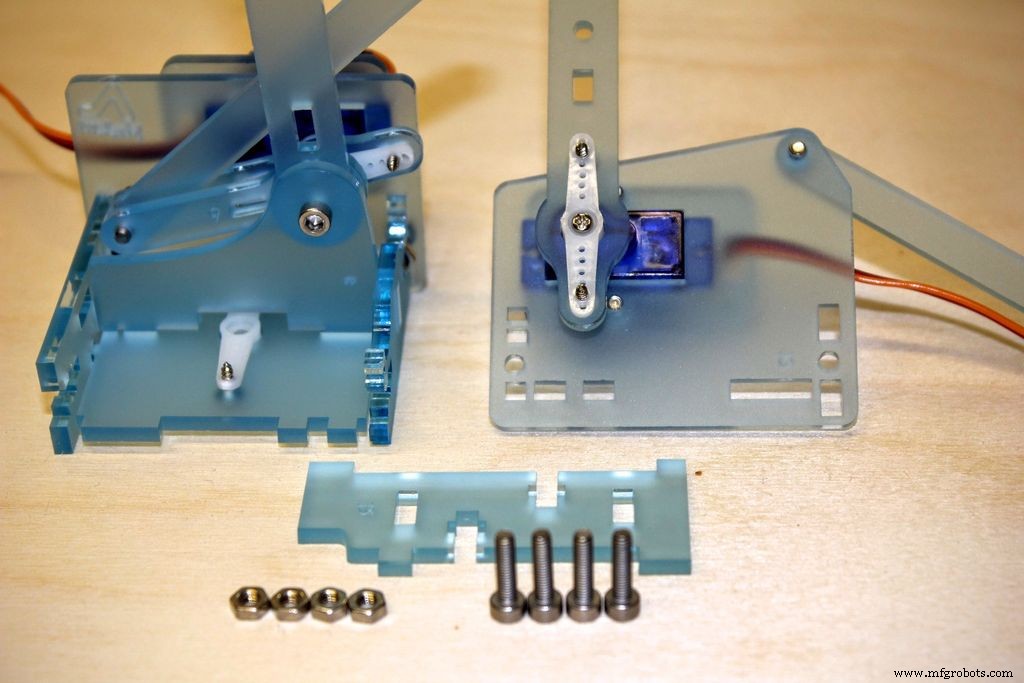
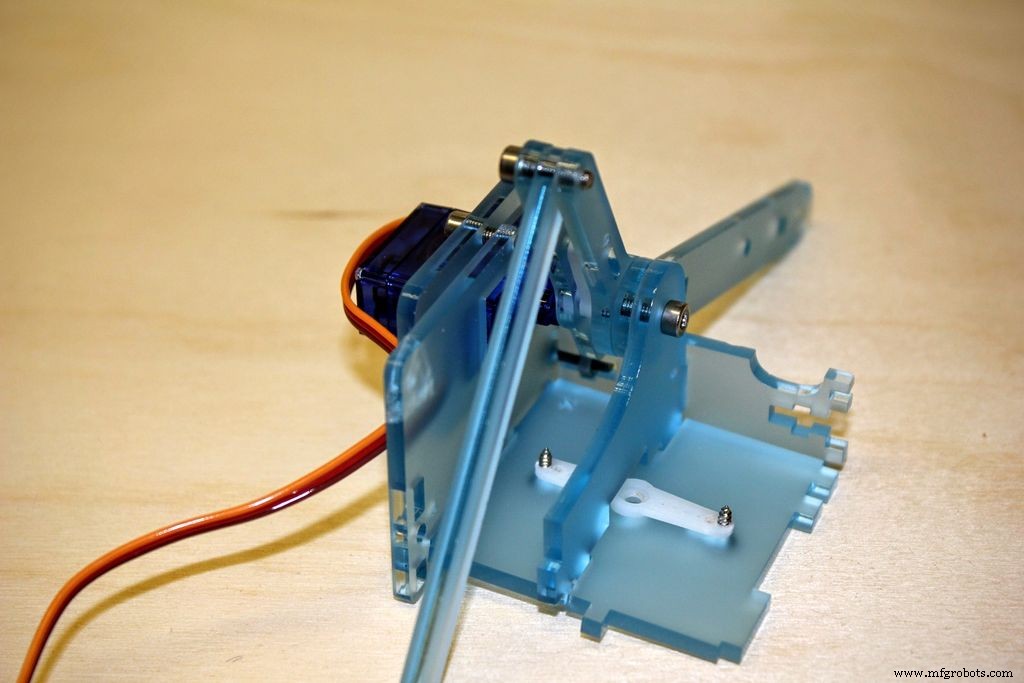
Sekarang kita mengawinkan sisi kanan ke perakitan kompleks kita, ini juga melibatkan pemasangan bagian anyaman #15.
Pasang bagian #15 ke bagian #10 (pada pig) menggunakan sekrup dan mur 12mm.
Sekarang datang melampirkan sisi kanan ke sisa perakitan. Anda dapat memasang sekrup dan mur 12mm melalui sisi kanan sebelum Anda mencoba memasangkan bagian-bagiannya, atau Anda dapat melepaskannya dan memasangnya setelahnya. Di sini Anda mencoba memasukkan sejumlah bagian dalam slot pada saat yang bersamaan dan ini bisa jadi rumit
Luangkan waktu Anda dan harap bersabar. Langkah ini adalah yang paling rumit di seluruh build. Setelah Anda melakukan ini, saya berjanji akan lebih mudah!
Langkah 9:Pasang ke dasar, tambahkan lengan kiri 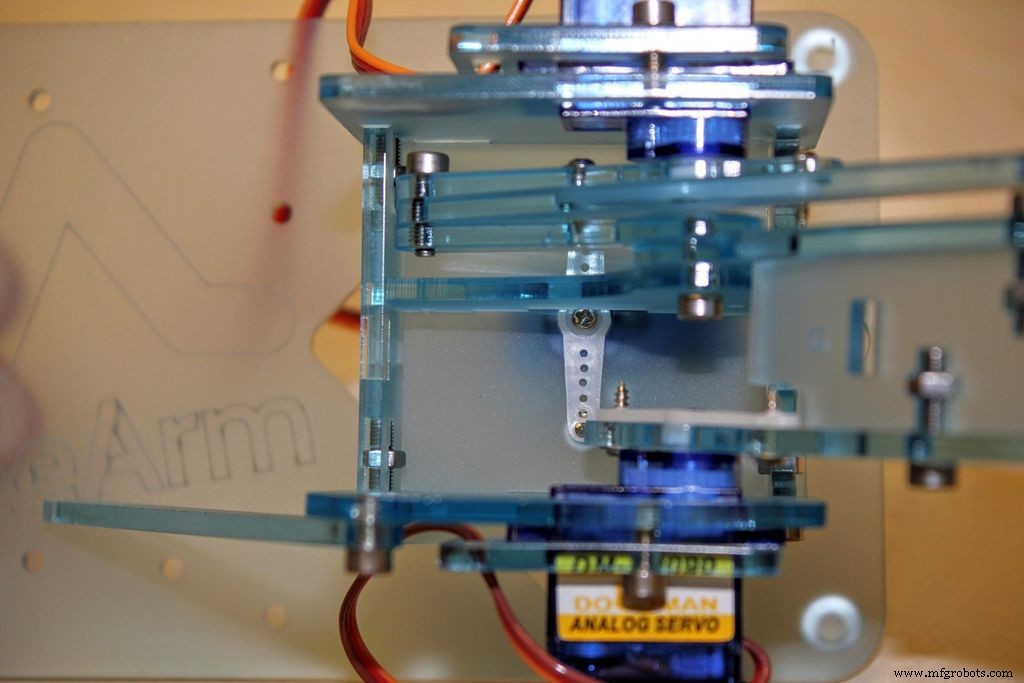
Sekarang kami memiliki rakitan pusat yang indah, kami dapat memasangnya ke dasar.
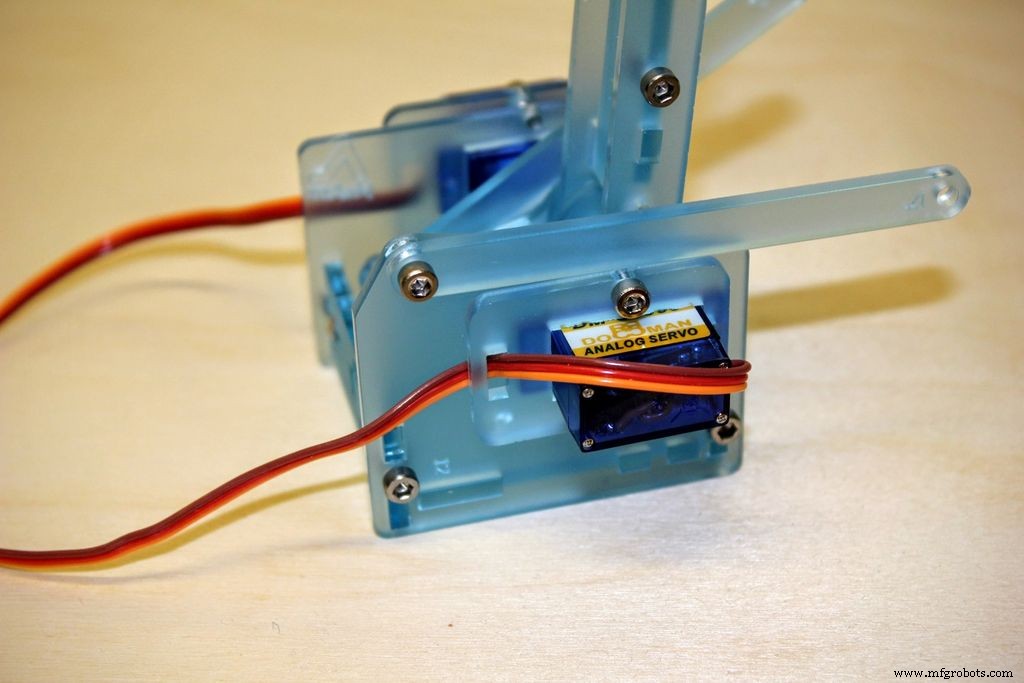
Ini adalah masalah mengawinkan tanduk servo ke servo tengah dan mengamankannya dengan sekrup.
Sekarang kita dapat menambahkan bagian #16 dengan menggunakan dua sekrup 6mm. Ini akan disekrup ke bagian #10 dan ke #17. Anda seharusnya dapat memindahkan servo dengan mudah dengan bagian baru ini!
Langkah 10:Lengan Bawah Kanan 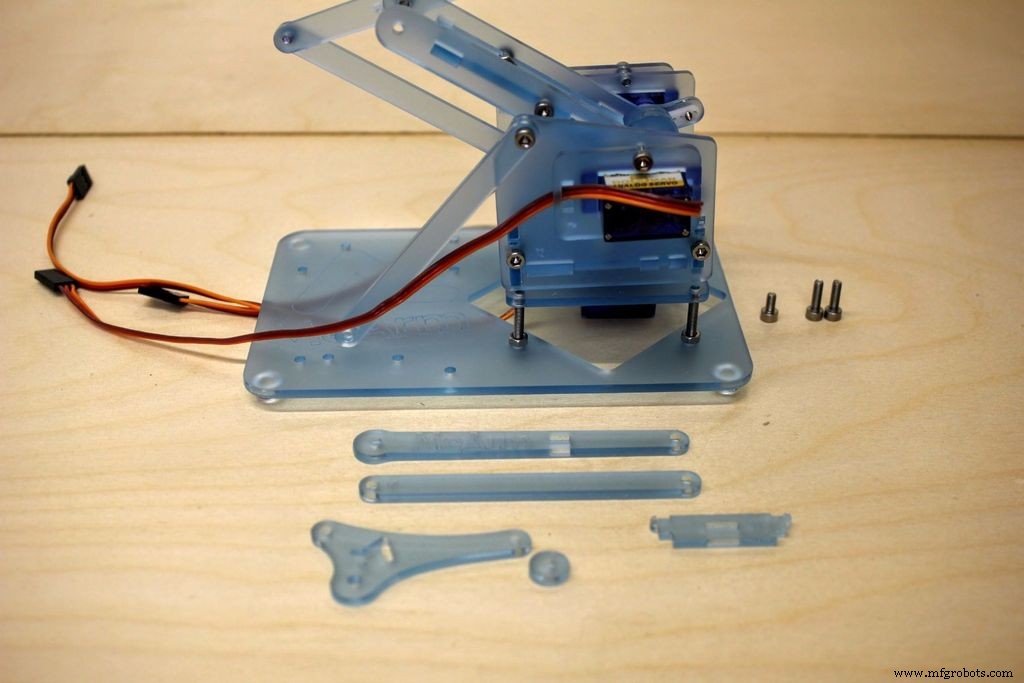


Selanjutnya kita membangun lengan kanan.
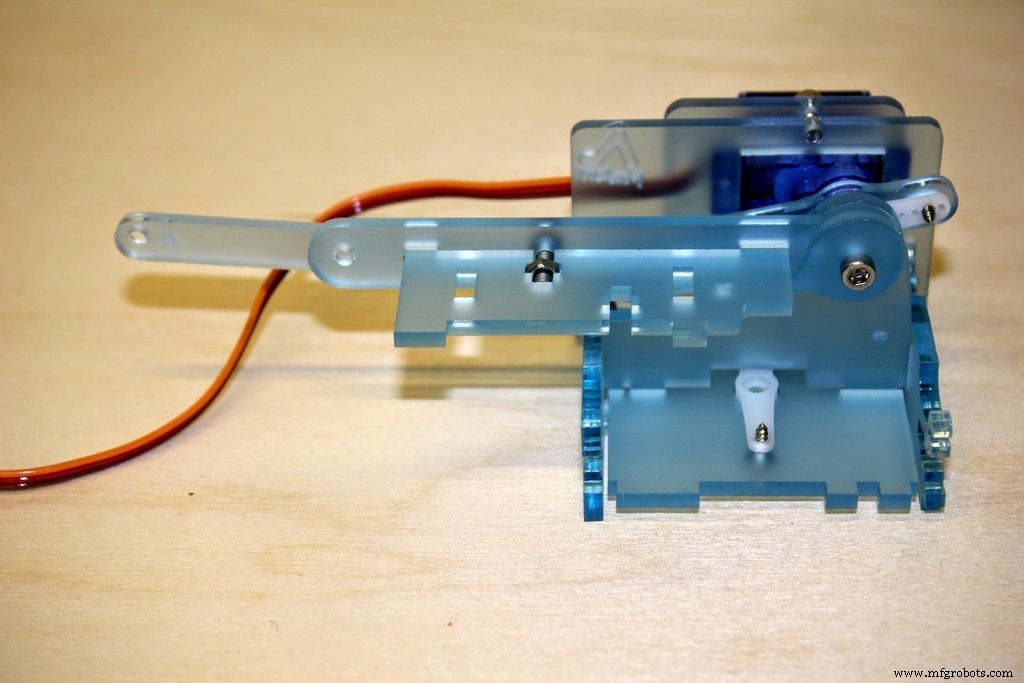
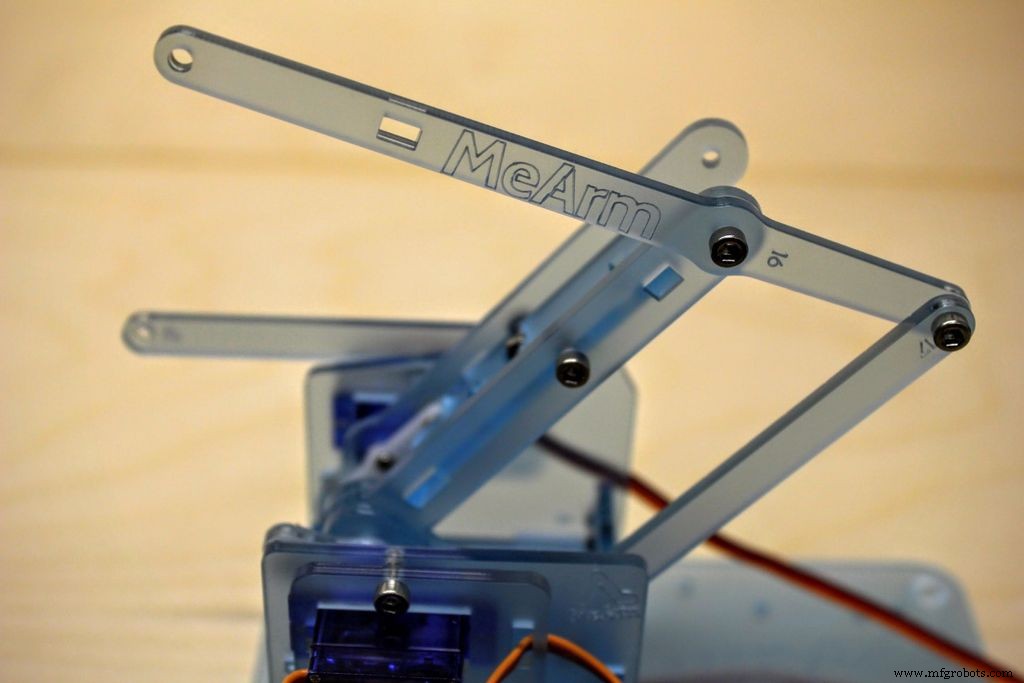
Hal pertama yang harus dilakukan adalah mengaitkan bagian #18 ke bagian lengan kiri yang baru saja Anda pasang dan kemudian ke lengan kanan yang akan kita sebut bagian #31 karena tampaknya tidak bernomor!
Pasang bagian segitiga #19 ke bagian #31 dan ke bagian #13 (mata yang terpasang ke servo) dengan sekrup 10mm. Jangan terlalu kencang karena kita membutuhkan semua bagian ini untuk bergerak bebas.
Pasang bagian belakang bagian #19 ke bagian #17 yang menempel pada pate sisi kanan, gunakan sekrup 10mm dan spacer (#20) di antaranya.
Kemudian pasang bagian terakhir #17 ke bagian depan bagian dalam bagian #19 dengan sekrup 6mm.
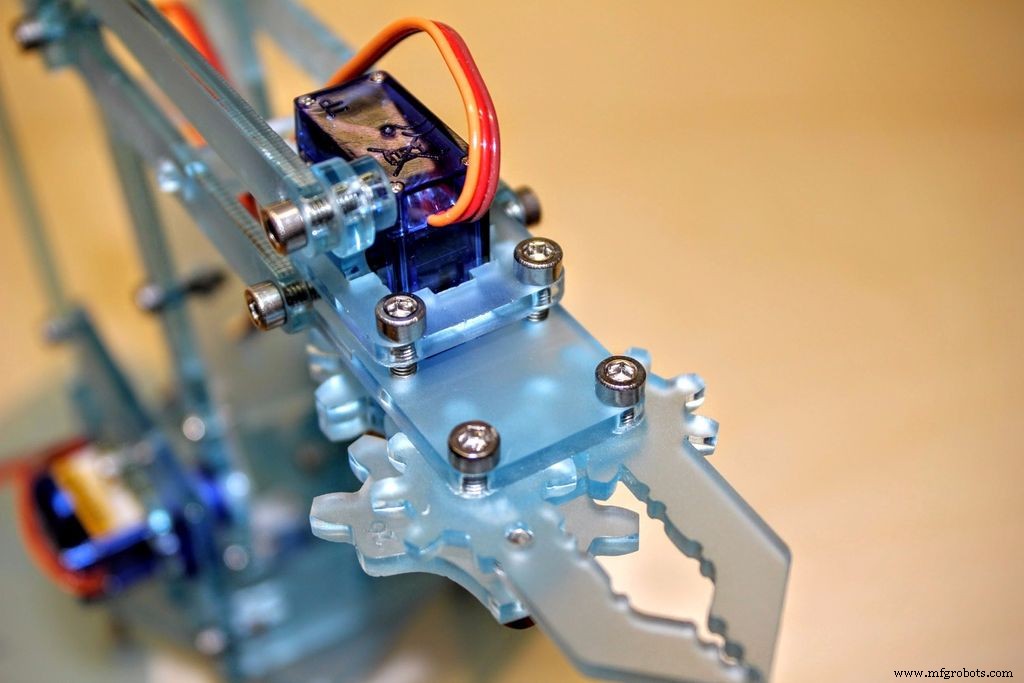
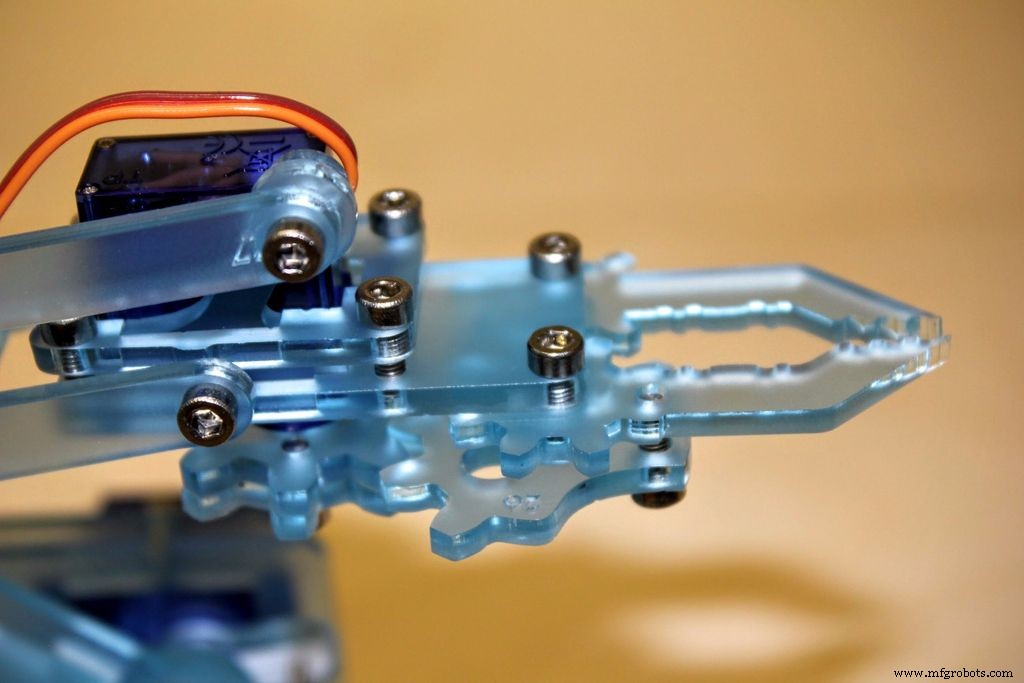
Langkah 11:Bangun Cakar! 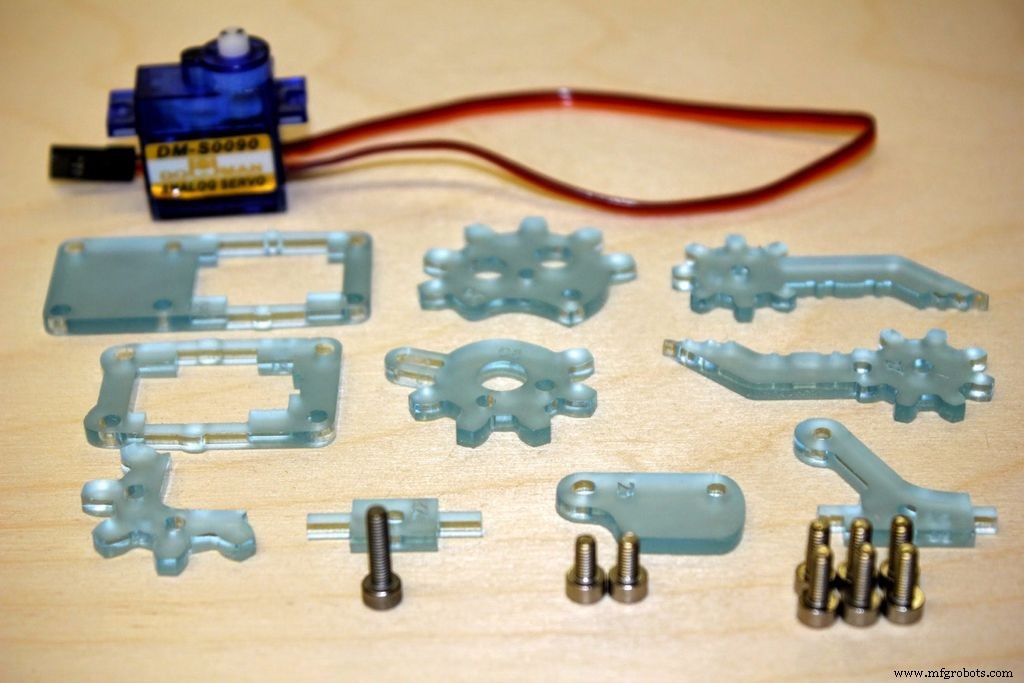
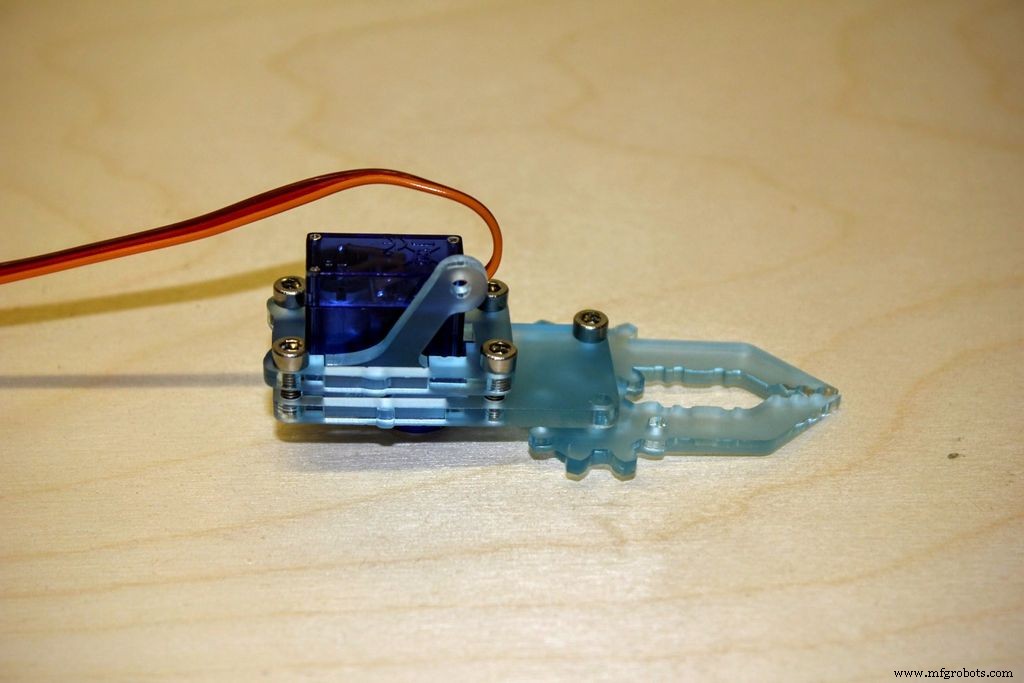
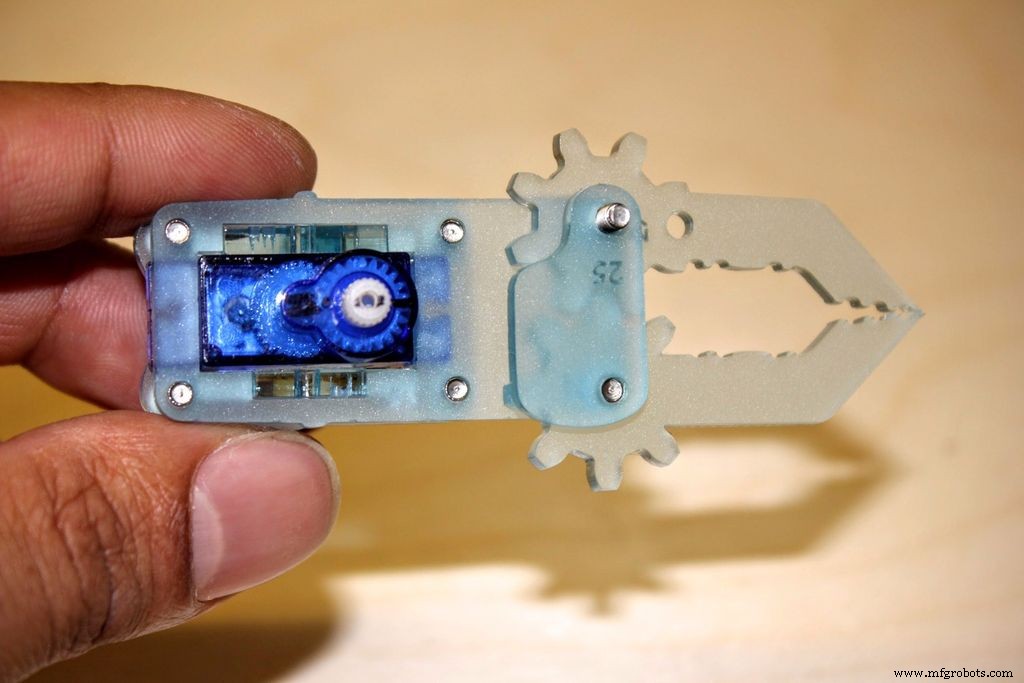
Masukkan servo melalui kerah yang tersisa, #21. Masukkan bagian #22 dan #23 ke dalam slot samping yang dibuat oleh servo dan bagian #21 kemudian gunakan bagian #24 kencangkan dengan empat mur 8mm. Sekali lagi hati-hati, kita hampir sampai, Anda tidak ingin merusak apa pun.
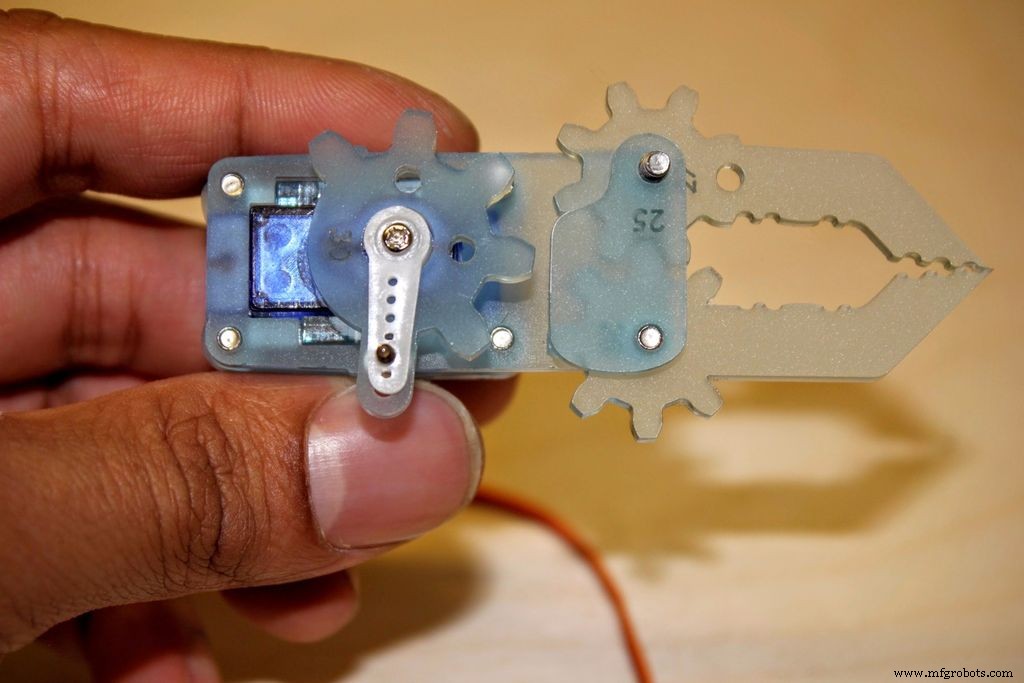
Bagian selanjutnya akan sedikit tidak aman sampai sekrup terakhir terpasang, jadi jangan khawatir jika Anda menjatuhkan sesuatu sekarang. Amankan bagian #28 melalui lubang sebelah kiri pada rakitan kepala dengan sekrup 8mm ke dalam bagian #25. Kemudian hubungkan roda gigi pada bagian #27 dan pasang sekrup 12mm melaluinya, rakitan kepala dan bagian #25. Ini belum akan aman tetapi tetap bersama.
Pasang tanduk servo ke bagian #30 dan kencangkan ke servo menggunakan sekrup mesin. Pasang #29 ke #30 menggunakan dua sekrup 6mm.
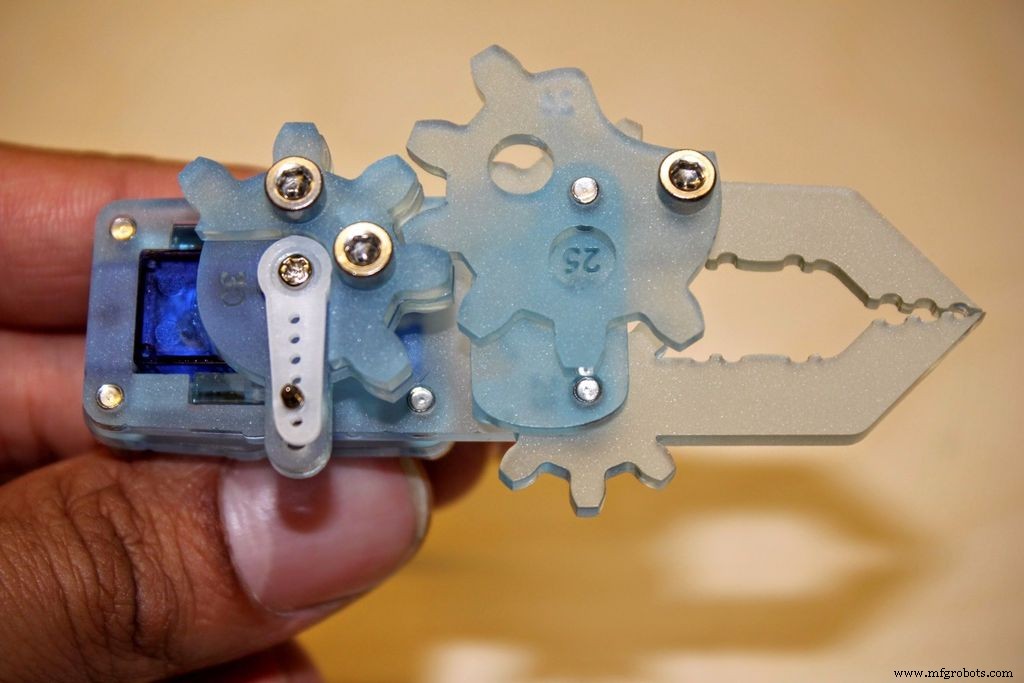
Sekarang Anda dapat memasang #26 ke sekrup 12mm yang longgar dan mengencangkannya ke lubang tambahan di bagian #27 dengan sekrup 8mm.
Langkah 12:Tambahkan kepala 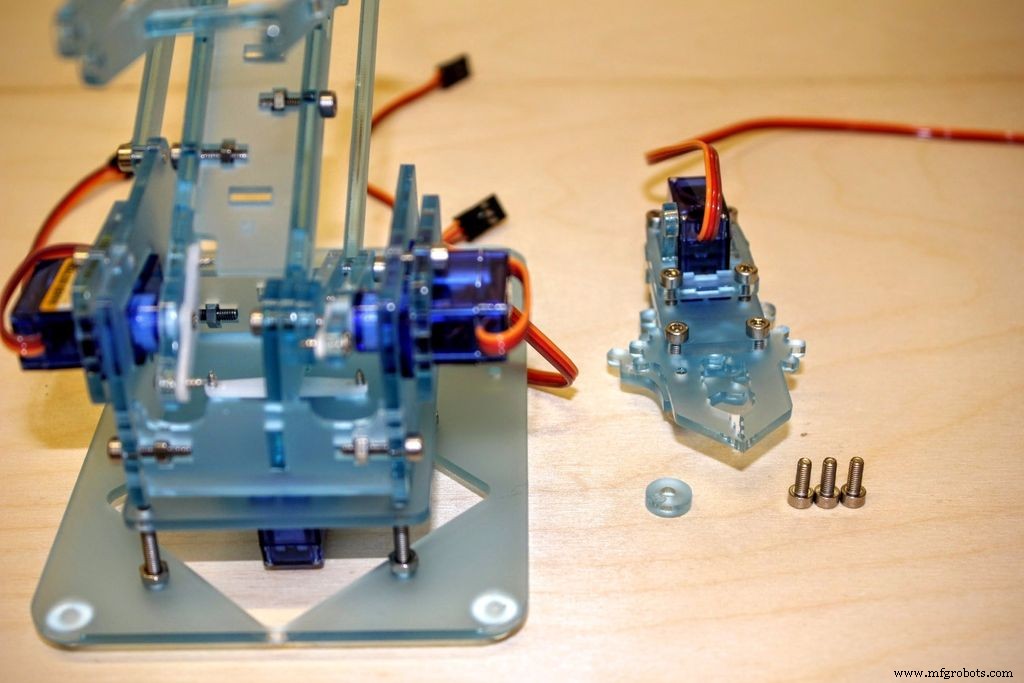
Bagian terakhir adalah memasang kepala.
Ini diamankan dengan dua sekrup 8mm melalui lengan bawah ke bagian #22 dan #23 di kepala. Mungkin akan lebih mudah untuk mengendurkan sekrup 8mm pada kepala servo clam.
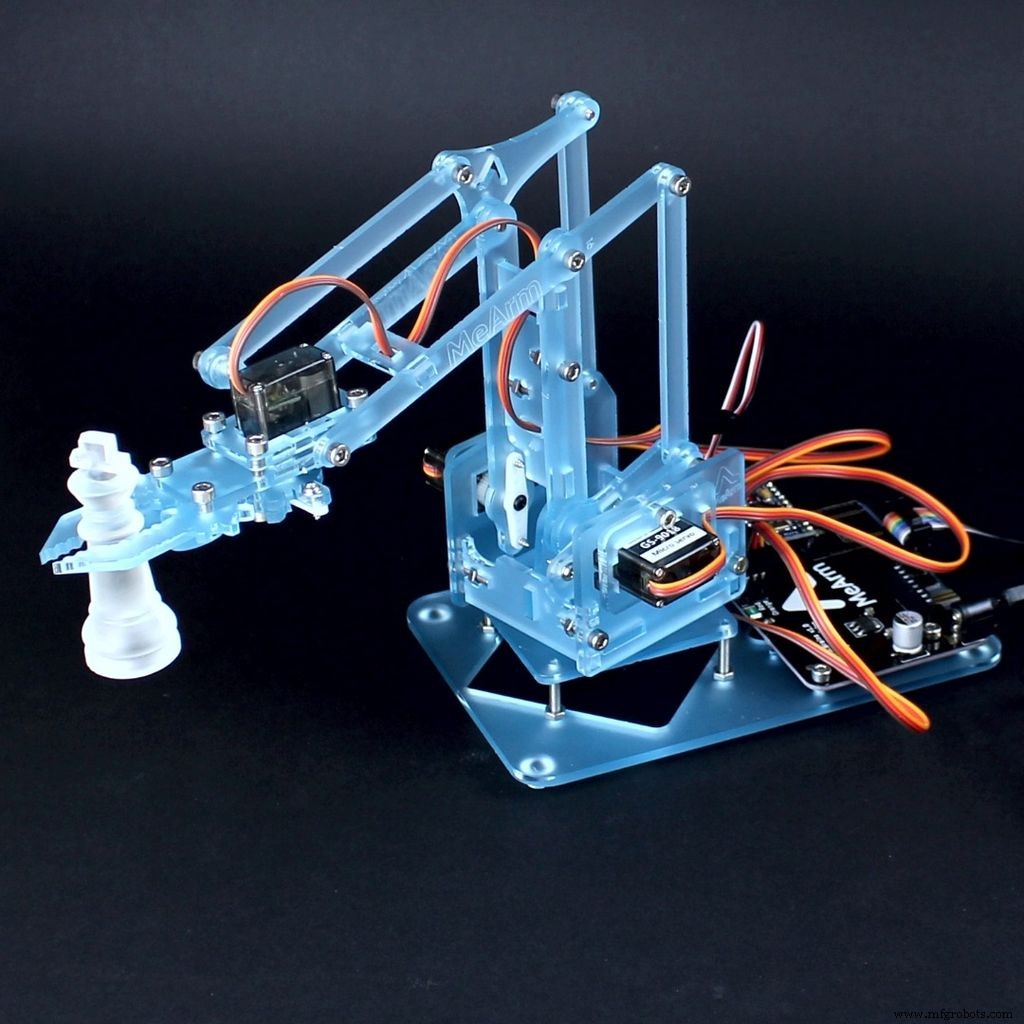
Sekarang nyalakan dan mainkan!
Langkah 13:Pemecahan masalah
Bagian ini akan diisi seiring waktu dengan masalah umum. Jika Anda memilikinya, beri tahu kami dan kami dapat menambahkannya.
Lengan servo kiri tampak macet. Biasanya ini terjadi pada sendi yang kaku. Lampiran rakitan kepala adalah yang dilupakan orang.
Kode
File tanpa judulArduino
#include Servo tengah, kiri, kanan, cakar; // membuat 4 "objek servo" void setup() { Serial.begin(9600); tengah.attach(11); // menempelkan servo pada pin 11 ke objek tengah left.attach(10); // menempelkan servo pada pin 10 ke objek kiri kanan.attach(9); // menempelkan servo pada pin 9 ke objek kanan claw.attach(6); // menempelkan servo pada pin 6 ke objek cakar} void loop() { middle.write(90); // mengatur posisi servo sesuai dengan nilai(derajat) left.write(90); // melakukan hal yang sama right.write(90); // dan lagi cakar.tulis(25); // ya Anda sudah menebaknya delay(300); // tidak memperbarui servo secara konstan yang dapat menggorengnya}
Pengendali Kode
https://codebender.cc/sketch:148456 Suku cadang dan penutup khusus