Tentang proyek ini
PEMBARUAN :VERSI TERBARU DARI PROYEK INI DAPAT DITEMUKAN DI SINI
Pengantar
Saya berharap saya bisa mengendalikan semuanya dengan tangan saya! Duduk di kursi saya dan mengendalikan hal-hal seperti BOSS. Aku akan menyukainya! Jadi saya akhirnya keluar dengan robot pengenal gerakan tangan DIY yang keren, yang bisa mengikuti perintah yang dibuat oleh gerakan tangan. Kedengarannya gila, tetapi saya berjanji ini sangat sederhana. Membuat robot kontrol gerakan sebenarnya sangat sederhana. Robot ini merupakan penyempurnaan dari mobil RC proyek DIY saya yang lain menggunakan modul RF.
Di sini juga, robot dibagi menjadi dua bagian, pemancar dan penerima. Rangkaian receivernya sama dengan yang lama dan hanya ada sedikit perubahan pada rangkaian transmitternya, disini kita perlu memprogram rangkaian transmitter tersebut. Jadi saya akan menggunakan Arduino sebagai platform pemrograman. Untuk mengenali gerakan yang dibuat saya akan menggunakan sensor accelerometer. Jadi mari kita membangun!
Tonton Robot beraksi
Apa itu dan bagaimana cara kerjanya?
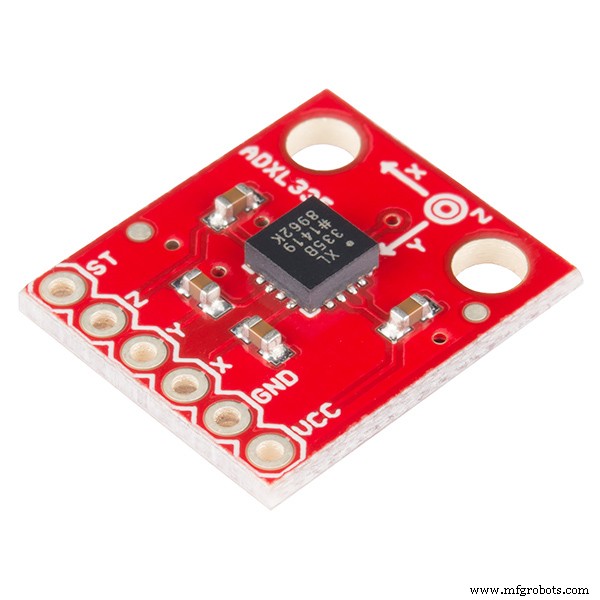
Apa itu Akselerometer (ADXL335)? 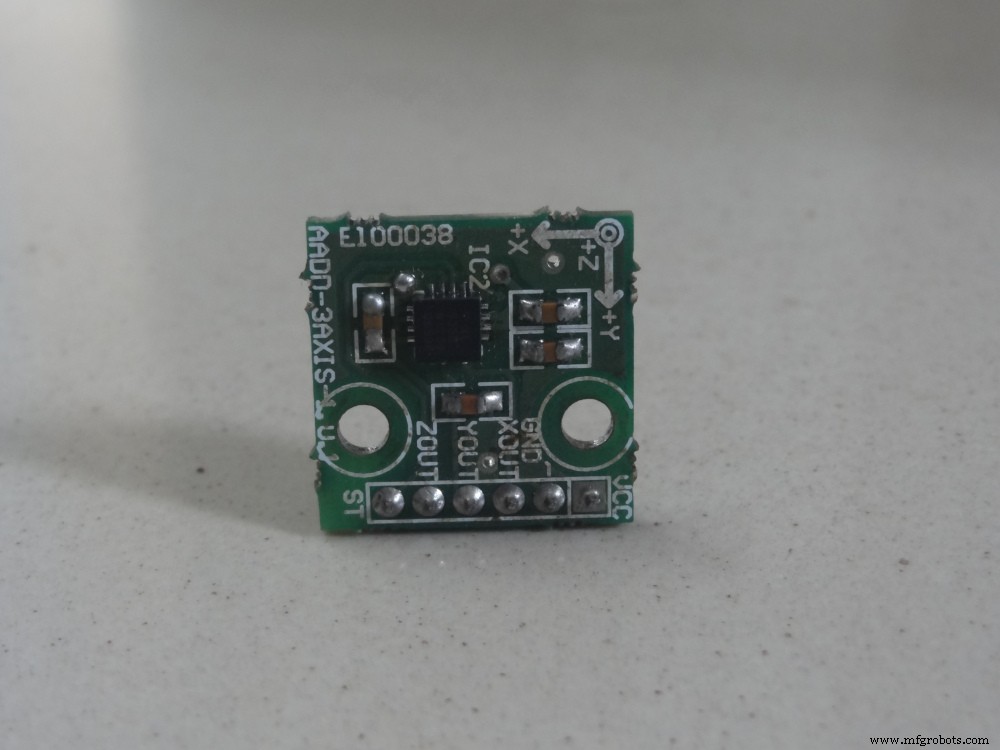
Singkatnya, akselerometer adalah alat pengukur akselerasi tiga sumbu. Akselerometer yang digunakan di sini adalah ADXL335 dan memiliki 3 sumbu (X Y Z).
Hampir semua smartphone sekarang memiliki accelerometer (walaupun kami tidak akan mengambilnya dari smartphone). Anda pasti pernah memainkan game gerak di ponsel Anda (mis. Temple run) di mana karakter dalam game bergerak ke kiri dan ke kanan saat Anda memiringkan ponsel ke kiri dan ke kanan masing-masing dilakukan oleh akselerometer.
Ada sensor lain bernama Giroskop yang ditemukan di smartphone yang tidak kita butuhkan sekarang.
Bagaimana cara kerjanya dan mengenali gerakannya?
Di sini otak robot adalah Arduino Uno (Atmega32) yang diberi beberapa set kode. Gestur/gerakan yang dibuat dengan tangan dikenali oleh alat pengukur akselerasi yang disebut akselerometer (ADXL335).
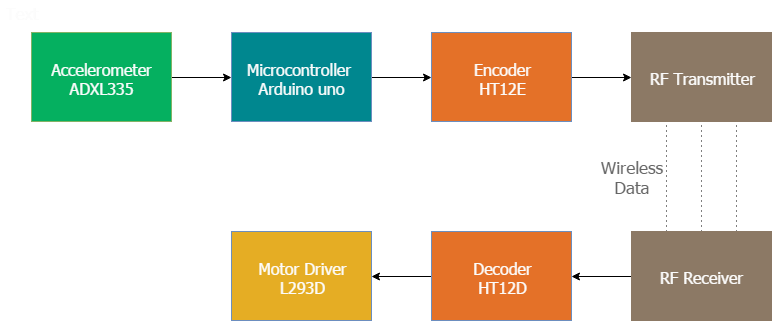
Di sini akselerometer membaca koordinat X Y Z saat kita membuat gerakan dengan tangan dan mengirim koordinat X Y Z ke Arduino (di sini kita tidak memerlukan sumbu Z, kita hanya perlu dua koordinat X dan Y Jadi abaikan koordinat Z). Arduino memeriksa nilai koordinat dan mengirimkan kode 4-bit ke IC Encoder. Encoder meneruskan data ke pemancar dan data yang dikirimkan diterima oleh penerima RF. Penerima mengirimkan kode 4-bit ke IC Decoder dan decoder meneruskannya ke IC Driver Motor. Kemudian pengemudi motor membuat keputusan untuk memutar kedua motor ke arah yang diinginkan.
Buat catu daya
Pertama, kita akan mulai dengan rangkaian catu daya. Kami membutuhkan dua sirkuit catu daya:satu untuk pemancar dan satu untuk penerima. Rangkaian penerima perlu dialiri daya menggunakan catu daya 12V (karena saya menggunakan motor 12V) dan rangkaian pemancar dapat dialiri daya menggunakan baterai a9V.
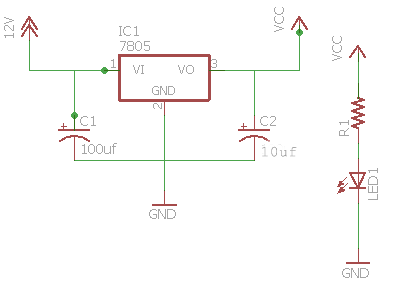
Anda dapat melihat rangkaian untuk catu daya penerima di sebelah kanan. Dengan menggunakan diagram ini, sambungkan sirkuit suplai. Anda juga dapat menambahkan LED melalui resistor 1k untuk menunjukkan status catu daya.
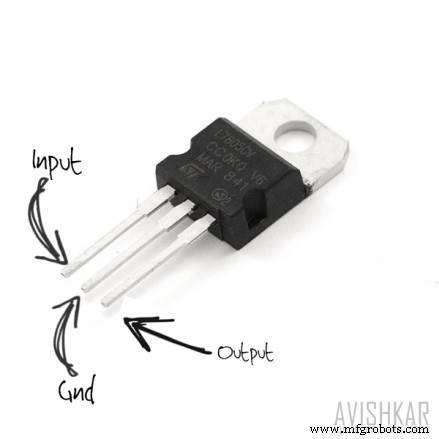
- IC 7805 yang mengatur suplai 12V menjadi 5V (jika tidak bisa mendapatkan suplai 12V bisa menggunakan suplai 9V)
- kapasitor 0.1uf dan 470uf
- Resistor 1k untuk LED status
CATATAN: Gunakan heat sink untuk 7805 karena kita menjatuhkan 7V (12-5) sehingga banyak panas akan dihasilkan untuk membakar regulator sehingga penggunaan heat sink disarankan.
Mari Mulai Membuat Pemancar (Remote)
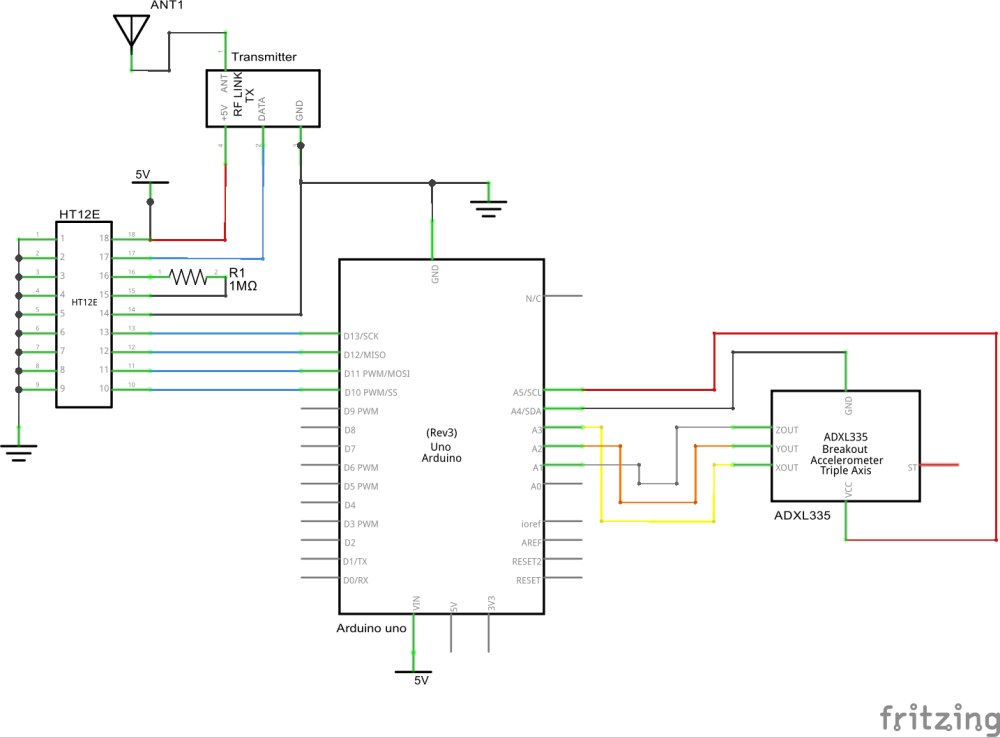
Bagian pemancar terdiri dari akselerometer yang mendeteksi gerakan tangan dan mengirimkan data ke Arduino. Kemudian Arduino mengirimkan data ke IC Encoder sesuai dengan data yang diterima dari accelerometer dan data tersebut dikirimkan ke penerima. Hubungkan sesuai sirkuit di bawah ini:
CATATAN: Harap diperhatikan bahwa beberapa akselerometer menggunakan catu daya 3.3V dan mungkin rusak oleh 5V. Periksa dokumentasi pemasok untuk mengetahui voltase mana yang benar.
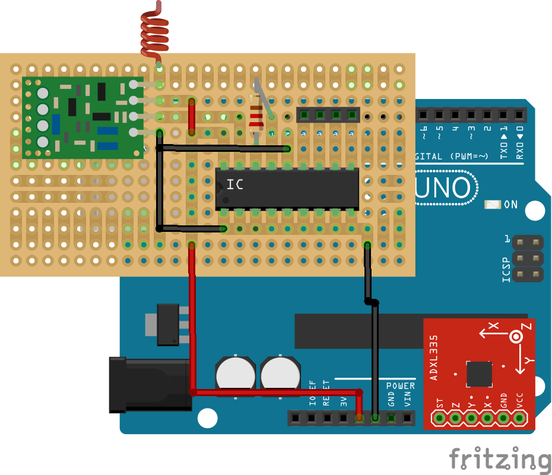
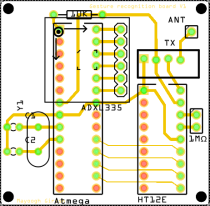
Ini hanya ilustrasi pemancar:
Unggah Kode ke Arduino
Ini kode yang diperbarui
Jadikan Penerima 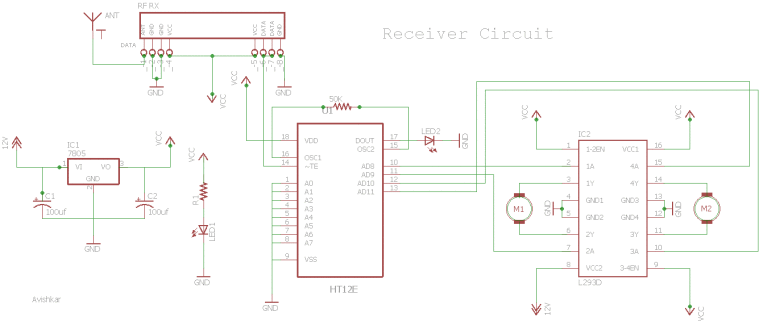
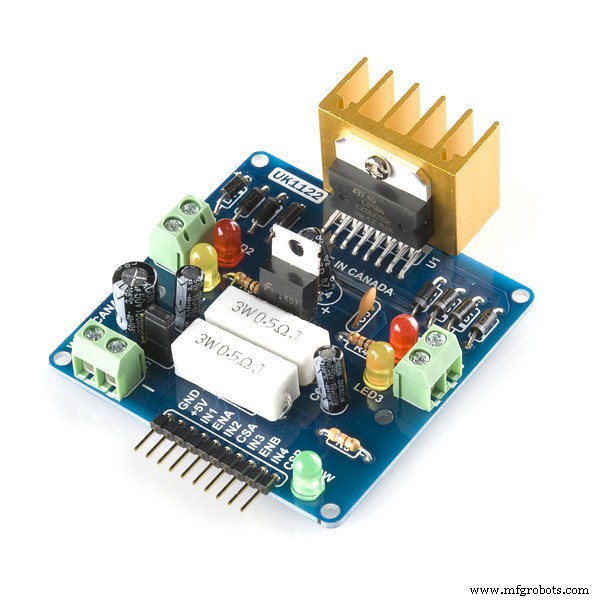
Rangkaian penerima terdiri dari 2 IC (dekoder HT12D, driver motor L293D), modul penerima RF.
Kawat sirkuit sesuai skema penerima di atas. Ada 2 LED di papan penerima, satu menyala ketika catu daya diberikan ke penerima dan yang lainnya ketika catu daya diberikan ke rangkaian pemancar. LED di dekat IC HT12D akan menyala dan ini memberi Anda transmisi yang valid (VT) saat daya diberikan di pemancar jika tidak ada yang salah dengan koneksi Anda atau modul RF-TX-RX Anda.
Jika Anda ingin mengetahui lebih detail tentang bagian penerima, silakan baca artikel ini.
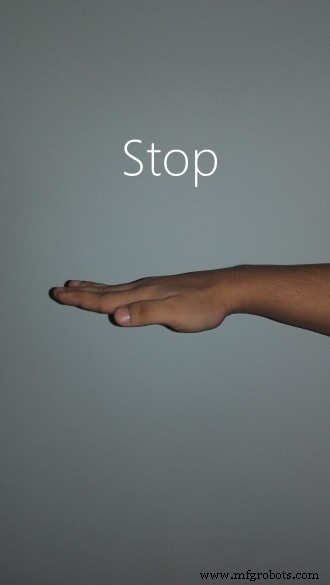
Gerakan apa yang akan dikenali robot?
Robot ini dirancang untuk mengenali lima set gerakan:maju, mundur, kiri, kanan, dan berhenti. Anda akan mendapatkan ide yang lebih baik jika Anda memeriksa foto-foto gerakan yang diberikan di bawah ini.
Menikmati mengemudi robot Anda.
Kecilkan dan buat permanen.
Arduino Uno akan berukuran besar dan besar di tangan Anda. Dan jika Anda memutuskan untuk membuat proyek lain menggunakan Arduino, Anda harus menghapus Arduino dan semua koneksi yang dibuat di dalamnya, dan Anda akan kehilangan pekerjaan lama Anda. Saya tidak suka melakukan itu, jadi saya memberikan solusi untuk menjadikannya permanen. Anda dapat memeriksa artikel ini untuk mempelajari cara mengecilkan proyek Arduino Anda.
Unduh tata letak PCB untuk versi mandiri dari sini (mirror).
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdf
Tonton video ini di mana saya telah mentransfer kode ke Atmega8 MCU. Saya hanya menampilkan output MCU menggunakan LED.
Lihat blog saya untuk proyek baru saya
Jika Anda memiliki keraguan tinggalkan komentar di sini. Ini blog saya. Saya akan secara teratur memeriksa umpan balik di sana daripada di sini.