5 Langkah untuk Mencapai Pembentukan Inkremental Robot Berkualitas
Pembentukan inkremental robot hemat biaya untuk pembuatan lembar batch kecil. Studi kasus ini menunjukkan bagaimana satu tim mencapai kualitas dengan RoboDK.
Mario Guillo dan timnya adalah peneliti di Institut Maupertuis di Prancis, yang berspesialisasi dalam penelitian industri.
Tim menemukan beberapa masalah dengan metode tradisional pembentukan lembaran logam… dan mereka memutuskan untuk memecahkan masalah tersebut.
Mengapa Pembuatan Lembar Batch Kecil Mahal
Pembentukan lembaran logam adalah permainan angka. Jika Anda membuat sejumlah besar suku cadang yang identik, biaya dan waktu biasanya akan seimbang. Namun, jika Anda hanya membuat satu atau dua bagian, dengan cepat menjadi tidak ekonomis.
Deep drawing adalah salah satu metode yang paling umum untuk membentuk sheet. Ini melibatkan perancangan dan pembuatan cetakan, lalu perlahan-lahan "meregangkan" setiap lembar bahan di atas cetakan. Jika Anda hanya membuat beberapa bagian, biaya cetakan jauh lebih besar daripada biaya pembentukan itu sendiri.
Biasanya, cara sebagian besar produsen menangani masalah ini adalah dengan menerimanya. "Yah, itulah hidup," katamu. Anda menyilangkan jari Anda dan berharap bahwa sisa operasi pemesinan kami akan mengimbangi proses yang tidak efisien ini. Atau, jika kualitasnya tidak penting, Anda dapat memilih untuk membentuk lembaran dengan tangan.
Mario dan timnya memutuskan bahwa tidak harus seperti ini. Ada metode untuk membentuk produk berkualitas yang ekonomis untuk batch kecil:pembentukan inkremental.
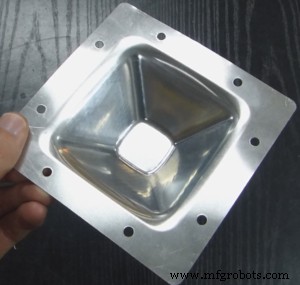
Dalam studi kasus ini, kami menunjukkan bagaimana Mario dan timnya menggunakan RoboDK untuk menciptakan produk berkualitas secara ekonomis dengan pembentukan inkremental robotik.
Apa itu Robotic Incremental Forming?
 Pembentukan inkremental (juga dikenal sebagai pembentukan lembaran inkremental) adalah alternatif untuk menggambar dalam yang melibatkan deformasi bahan lembaran kecil- sedikit demi sedikit, lapis demi lapis. Dengan cara ini, ini seperti pencetakan 3D atau mesin CNC. Alih-alih menambah atau menghapus bahan di setiap lapisan, bahan lembaran sedikit tertekuk di setiap lapisan.
Pembentukan inkremental (juga dikenal sebagai pembentukan lembaran inkremental) adalah alternatif untuk menggambar dalam yang melibatkan deformasi bahan lembaran kecil- sedikit demi sedikit, lapis demi lapis. Dengan cara ini, ini seperti pencetakan 3D atau mesin CNC. Alih-alih menambah atau menghapus bahan di setiap lapisan, bahan lembaran sedikit tertekuk di setiap lapisan.
Sejak tahun 1990-an, pembentukan inkremental telah dicapai dengan menggunakan mesin CNC yang dimodifikasi. Alat CNC diganti dengan bola titik tunggal yang menggambar bentuk yang diinginkan ke bahan lembaran untuk setiap lapisan. Pelumas digunakan untuk mengurangi efek gesekan.
Mesin CNC yang dimodifikasi adalah solusi yang baik, tetapi memiliki masalah:mahal untuk suku cadang yang lebih besar. Hal ini dapat membuat tidak layak bagi perusahaan yang ingin menggunakan pembentukan tambahan untuk pembuatan prototipe, yang merupakan aplikasi umum.
Pembentukan inkremental robot mengatasi masalah ini dengan menggunakan robot industri untuk memegang alat. Ini memiliki kesamaan dengan pemesinan robot yang kami perkenalkan di postingan sebelumnya.
Tidak seperti mesin CNC, robot tidak membatasi ukuran bagian. Akibatnya, tim Mario berpikir bahwa pembentukan inkremental robot dapat digunakan untuk berbagai macam aplikasi yang memerlukan pembentukan lembaran besar, termasuk implan tengkorak, prostesis, dan panel otomotif.
5 Langkah untuk Mencapai Pembentukan Inkremental Robot Berkualitas
Pembentukan inkremental robot ternyata sangat mudah… tetapi hanya jika Anda mengikuti langkah-langkah yang benar. Tim menggunakan lima langkah berikut (seperti yang dijelaskan dalam makalah penelitian mereka) untuk mencapai produk berkualitas dengan pembentukan inkremental robot:
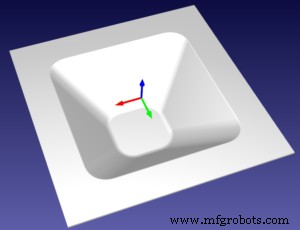
1. Bangun model 3D
Hampir semua produk dirancang dalam paket CAD (Computer Aided Design) jadi langkah ini seharusnya sederhana. Anda perlu menentukan bentuk yang ingin Anda buat dan membuat model 3D-nya.
2. Buat lintasan
Anda kemudian harus membuat lintasan CNC. Ini dapat dilakukan dalam banyak paket CAM (Computer Aided Manufacturing). Anda bahkan dapat menghasilkan model dan lintasan dalam perangkat lunak yang sama. Namun, jika perangkat lunak CAD/CAM Anda tidak memiliki fitur ini, program CAM murah seperti CamBam, MeshCAM, atau FreeMILL bisa menjadi pilihan yang baik.
Tim menggunakan perangkat lunak CamBam CNC, yang merupakan alat hemat biaya untuk merancang dan membangun model dan lintasan CNC.
Selama langkah ini, Anda perlu memutuskan kedalaman setiap lapisan dan strategi lapisan. Tim menjelaskan bahwa ada dua strategi umum untuk bagian sederhana:
- Strategi lapisan-Z — Strategi sederhana ini melibatkan menggambar setiap lapisan secara terpisah, membuat indentasi di awal setiap lapisan.
- Strategi spiral — Strategi yang sedikit lebih kompleks ini melibatkan menggambar garis kontinu yang berputar dari atas formulir sampai ke bawah. Ini menghasilkan potongan yang lebih halus dan memberikan gaya yang lebih rendah pada robot.
3. Hasilkan G-Code
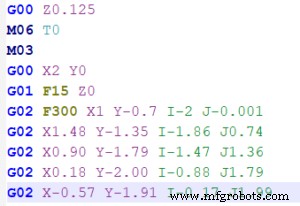
Setelah Anda memiliki lintasan, langkah selanjutnya adalah untuk mengubahnya menjadi instruksi yang dapat dipahami oleh mesin CNC. Opsi yang paling umum adalah G-Code, tetapi Anda juga dapat menggunakan APT-CLS atau NCI.
Dengan pembentukan inkremental berbasis CNC tradisional, ini akan menjadi langkah terakhir sebelum produksi. Namun, karena kami menggunakan robot, ada langkah lain — yang sangat penting —.
4. Ubah G-Code menjadi perintah robot
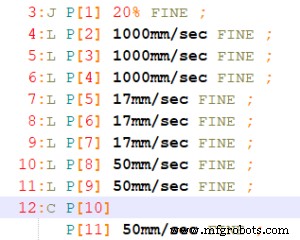
Untuk menggunakan robot untuk pembentukan tambahan, Anda perlu mengubah G-Code menjadi perintah yang akan dipahami robot. Namun, setiap produsen robot memiliki bahasa pemrogramannya sendiri. Beberapa produsen memiliki pengaya perangkat lunak khusus CNC, tetapi seringkali sangat mahal dan hanya berfungsi dengan merek robot mereka.
Mario dan timnya memutuskan untuk menggunakan RoboDK karena menyertakan Alat Pemesinan Robot sebagai standar. Ini sangat mudah digunakan dan lebih hemat biaya daripada opsi lain di pasar. Anda cukup memuat file G-Code ke dalam perangkat lunak dan itu menghasilkan jalur robot secara otomatis, menghindari kesalahan robot.
5. Transfer program ke robot
Langkah terakhir adalah mentransfer program ke robot dan memulai proses pembentukan tambahan. Jika semua langkah sebelumnya telah berjalan dengan baik, ini seharusnya cukup mudah. Namun, ada dua hal yang harus Anda ingat:
- Pilih robot dengan kekakuan tinggi — Robot memiliki kekakuan yang lebih rendah daripada mesin CNC. Hal ini dapat menyebabkan pahat membelok ketika gaya yang sangat tinggi diterapkan, yang dapat terjadi dalam tugas pemesinan. Tim menggunakan robot beban berat (dengan muatan lebih dari 500kg) untuk memastikan bahwa robot tersebut memiliki kekakuan yang cukup untuk tugas tersebut.
- Hindari bahan tebal yang tidak perlu — Bahan tebal akan sulit dibentuk dengan robot karena kekakuannya yang rendah. Pilih hanya ketebalan bahan yang diperlukan untuk produk Anda dan bersiaplah untuk menggunakan bahan yang lebih tipis jika Anda mulai melihat defleksi alat.
Saat pertama kali Anda menjalankan program, perhatikan setiap penyimpangan alat yang dapat disebabkan oleh gaya berlebihan yang diterapkan pada alat robot.
Berikut adalah video proyek tim:
Pekerjaan ini telah diselesaikan oleh Institut Maupertius dengan kolaborasi kinerja Halcyon.


