Desain referensi menyederhanakan kontrol motor robot industri
Desain referensi baru mempercepat pengembangan perkakas end-of-arm untuk robotika industri menggunakan modul pengontrol/driver servo sumbu tunggal dengan kontrol gerak terintegrasi.
Trinamic, sekarang bagian dari Maxim Integrated, mendemonstrasikan serangkaian solusi kontrol daya di garis depan APEC, termasuk solusi terbarunya yang menyederhanakan pengembangan end-of-arm tooling (EoAT) untuk robotika industri dan pengontrol servo sumbu tunggal/ pengemudi dengan kontrol gerak terintegrasi. Dalam wawancara dengan Power Electronics, Jeff DeAngelis, Vice President Industrial Communications di Maxim Integrated, serta Jonas Proeger, Director of Business Management, dan Stephan Kubisch, Director Product Definition, keduanya di Trinamic, menyoroti solusi terbaru yang mempercepat waktu pengembangan di berbagai aplikasi otomasi industri.
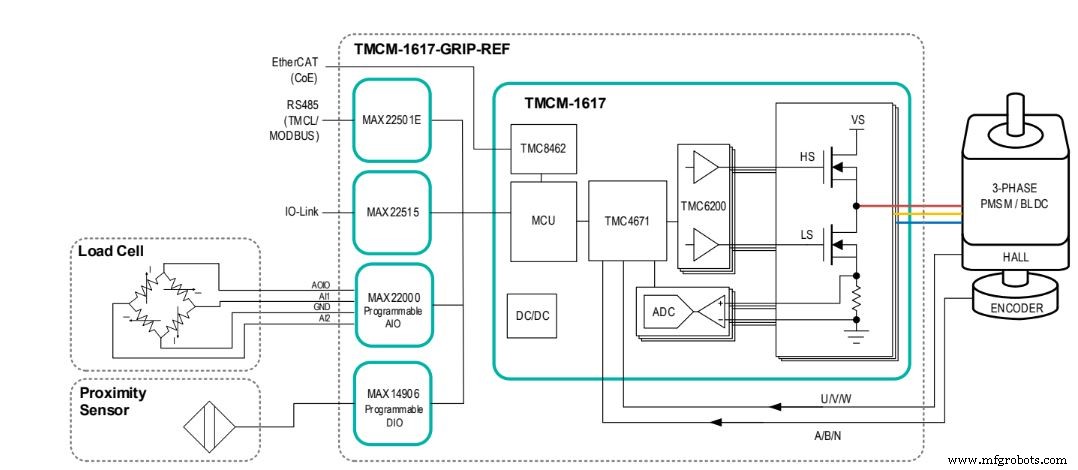
Desain referensi sumber terbuka TMCM-1617-GRIP-REF mengintegrasikan pengontrol berorientasi lapangan perangkat keras (FOC) dan tiga port komunikasi. Ini termasuk IC kelas industri MAX22000 Maxim Integrated, transceiver IO-Link MAX22515, I/O analog presisi tinggi yang dapat dikonfigurasi perangkat lunak, dan MAX14906, I/O digital empat saluran yang digunakan untuk mengonfigurasi mode operasi single- penggerak servo sumbu.
Modul pengontrol/driver servo TMCM-1321 yang baru dimaksudkan untuk mengoptimalkan kinerja motor stepper bipolar dua fase dengan mengoptimalkan kecepatan dan sinkronisasi sumbu serta mengurangi kehilangan daya. Maxim Integrated menunjukkan bahwa perangkat mengintegrasikan encoder magnetik dan input digital untuk encoder optik untuk menyederhanakan kontrol servo dengan umpan balik dan diagnostik tingkat lanjut.
Platform Sumber Terbuka
“Manfaat dari desain referensi TMCM-1617-GRIP-REF adalah kemampuannya untuk mengintegrasikan beberapa sirkuit ke satu papan yang biasanya akan didistribusikan di beberapa papan atau komponen di ujung lengan robot. Jejak yang ringkas ini menggabungkan antarmuka bus komunikasi yang disederhanakan yang mengurangi beban penggunaan kabel dan menyediakan cara yang efisien untuk memindahkan data dan daya melalui satu atau dua pasang kabel, serta kemampuan untuk menjalankan alat dengan benar. Ukuran yang ringkas dan antarmuka bus komunikasi dan konfigurasi yang disederhanakan ini digabungkan dengan lingkungan pengembangan perangkat lunak TMCL-IDE kami menjadikannya desain referensi yang sangat serbaguna untuk perkakas ujung-of-arm, ”kata DeAngelis. Dia menambahkan, “selain ukurannya yang ringkas, faktor penting lainnya yang dicapai adalah bobot 24 gram yang sangat ringan untuk modul ini.”
Seperti yang dijelaskan Proeger, diagram blok pada gambar 1 menunjukkan sel beban untuk mendeteksi gaya yang berasal dari lengan atau dari gripper, atau sensor jarak. TMCM-1617-GRIP-REF mendukung protokol komunikasi industri EtherCAT, IO-Link dan RS-485, dan menyediakan sinyal analog dan input/output digital yang dapat diprogram perangkat lunak dan dapat dikonfigurasi menggunakan Trinamic Motion Control Language Integrated Development Environment (TMCL- IDE). “Kami menyediakan opsi komunikasi RS-485 dengan 100 megabit per detik yang masih populer. Keuntungannya adalah kabel ini masih merupakan kabel berkecepatan tinggi tradisional untuk memenuhi permintaan aplikasi ini. Ini adalah produk yang sangat fleksibel dari perspektif komunikasi sebagai pendekatan yang lebih tradisional untuk mengendalikan motor,” kata Proeger.
Gambar 1:Diagram blok TMCM-1617-GRIP-REF (Sumber:Maxim Integrated)
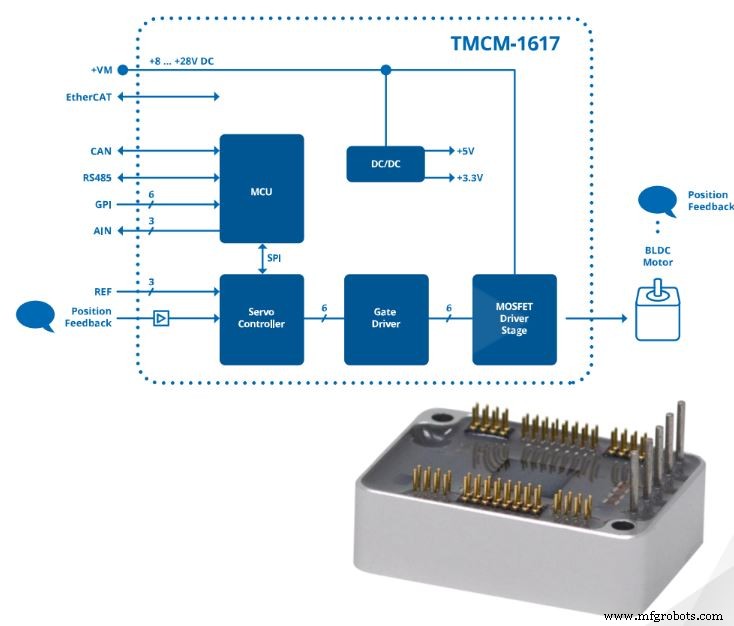
Gambar 2:TMCM-1617 – Kontroler Servo Terkecil (Sumber:Maxim Integrated)
“Kami menyediakan semua rel suplai yang diperlukan untuk mendukung periferal dan sensor eksternal tanpa memerlukan sumber daya tambahan,” kata Kubisch. Dia menambahkan, “kontrol arus yang sempurna memiliki dampak terbesar pada efisiensi sistem secara keseluruhan.”
Dengan arsitektur bus tercanggih, dikombinasikan dengan kontrol dan diagnostik terintegrasi dalam satu solusi, Maxim Integrated percaya bahwa desain referensi dapat meningkatkan produktivitas di tingkat pabrik dan membawa kecerdasan buatan ke tingkat yang lebih tinggi. Misalnya, fitur onboard MAX22515 seperti perlindungan terintegrasi yang ekstensif untuk memastikan komunikasi yang kuat di lingkungan industri yang keras. Semua pin antarmuka saluran IO-Link (V24, C/Q, DI, dan GND) dilindungi tegangan balik, perlindungan hubung singkat, perlindungan steker panas, dan fitur perlindungan lonjakan ±1.2kV/500Ω terintegrasi.
Untuk masa depan motor dan kontrol gerak, kompleksitas yang meningkat sehubungan dengan permintaan akan ketergantungan tertinggi akan menghasilkan lebih banyak kecerdasan dari sistem – dan ini perlu menjadi yang terdepan, terdesentralisasi. Keputusan harus dibuat secara real-time, data harus dikumpulkan di sumbernya dan dibagikan di cloud.
Pengontrol/driver servo TMCM-1321
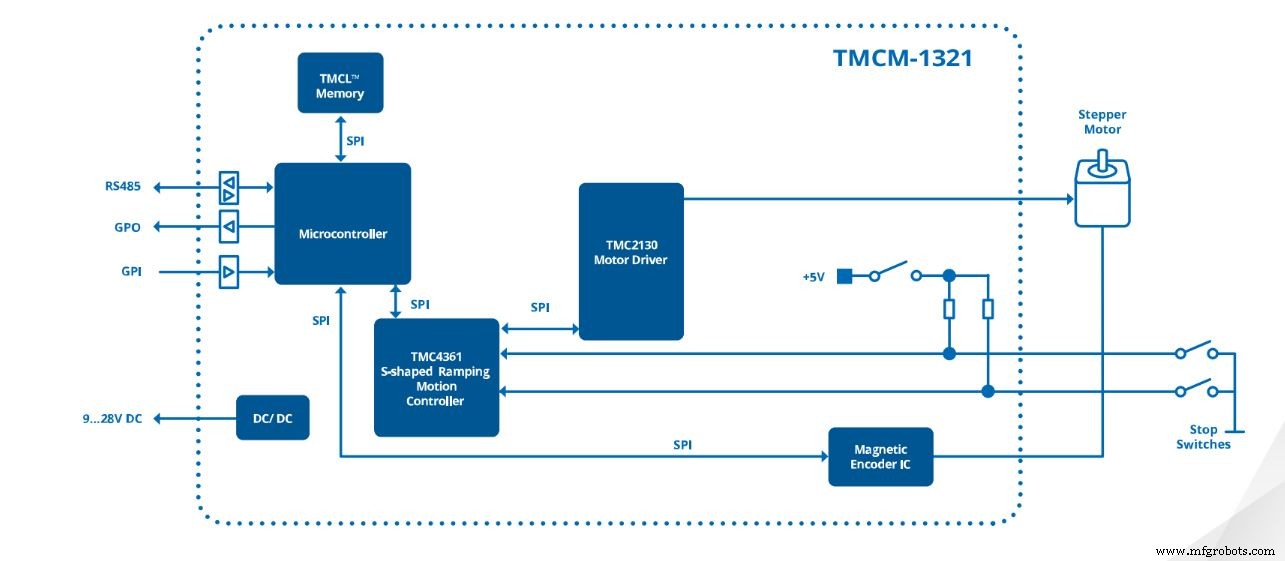
TMCM-1321 adalah pengontrol/driver sumbu tunggal untuk motor stepper bipolar 2 fase dengan encoder magnetik terintegrasi dan input digital, semuanya menawarkan logika kontrol loop tertutup untuk mengoptimalkan kontrol motor.
Maxim Integrated menunjukkan bahwa faktor bentuk dimaksudkan untuk secara signifikan lebih kecil daripada solusi lain, dan board mendukung 256x microstepping dengan operasi bebas noise. Encoder magnetik terintegrasi dapat digunakan ketika magnet yang sesuai dipasang ke sumbu motor, memungkinkan operasi loop tertutup. Atau, encoder optik dapat dihubungkan melalui input digital ABN. Bentuk ramp yang berbeda dapat dipilih. Selain ramping linier, dan ramping Trinamic SixPoint™, modul TMCM-1321 mengimplementasikan ramp berbentuk S yang dapat mempercepat waktu transfer aktual.
Gambar 3:Diagram blok TMCM-1321 (Sumber:Maxim Integrated)
Gambar 4:Papan TMCM-1321 (Sumber:Maxim Integrated)
TMCM-1321 telah dirancang untuk arus koil hingga 0,7A RMS dan tegangan suplai 24V DC. Tiga input digital dapat digunakan sebagai input saklar akhir dan saklar rumah atau sebagai input tujuan umum.
Kontrol motor dan penggerak merupakan hal mendasar dalam banyak aplikasi, karena memungkinkan untuk memperoleh tingkat akurasi yang tinggi, yang pada gilirannya menghasilkan biaya yang lebih rendah dan efisiensi yang lebih besar. Fungsi vital yang dilakukan oleh sirkuit kontrol motor adalah untuk memastikan bahwa rotor mengambil, selama kondisi operasi dan beban yang berbeda, posisi yang tepat mengenai belitan, untuk menentukan lokasinya dengan tingkat akurasi yang memadai.
>> Artikel ini awalnya diterbitkan di situs saudara kami, Power Berita Elektronik.
Konten Terkait:
Merancang kontrol motor untuk sistem robot
Membuat robot dengan Ada, Bagian 2 – Mengemudikan motor
Memecahkan tantangan desain kontrol motor multi-sumbu deterministik
Perangkat lunak memudahkan desain driver motor BLDC
Kit pengembang menawarkan platform untuk daya digital, desain kontrol motor
Mendesain sistem umpan balik yang bereaksi cepat untuk desain miniatur yang digerakkan motor
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tertanam.