Kinerja powertrain EV yang mulus dengan algoritme kontrol berorientasi lapangan
Motor berperforma tinggi memerlukan mekanisme kontrol yang memastikan peningkatan kelancaran, keandalan, dan efisiensi. Salah satu contoh aplikasi yang paling tepat adalah motor yang digunakan dalam powertrain kendaraan listrik (EV), yang dapat dikendalikan oleh sistem berbasis kontrol berorientasi medan (FOC).
Agar powertrain EV dapat melaju dengan mulus, skema kontrol harus sedemikian rupa sehingga motor mampu beroperasi pada rentang kecepatan yang lebar dan menghasilkan torsi maksimum pada kecepatan terendah. Secara teknis, kontrol motor harus didasarkan pada torsi dan fluks magnet, sehingga kita dapat mengontrol torsi secara akurat dengan mengontrol arus.
Prinsip dasar memutar rotor motor adalah menghasilkan medan magnet pada stator. Ini dilakukan dengan memberi energi pada kumparan stator dengan arus bolak-balik. Rahasia kelancaran suatu motor terletak pada mengetahui posisi rotor, yaitu sudut antara sumbu fluks rotor dan sumbu magnet stator. Setelah nilai ini diketahui, arus stator disejajarkan dengan sumbu torsi rotor. Untuk mencapai efisiensi puncak, fluks magnet stator harus tegak lurus terhadap fluks magnet rotor.
Kontrol motor berbasis FOC
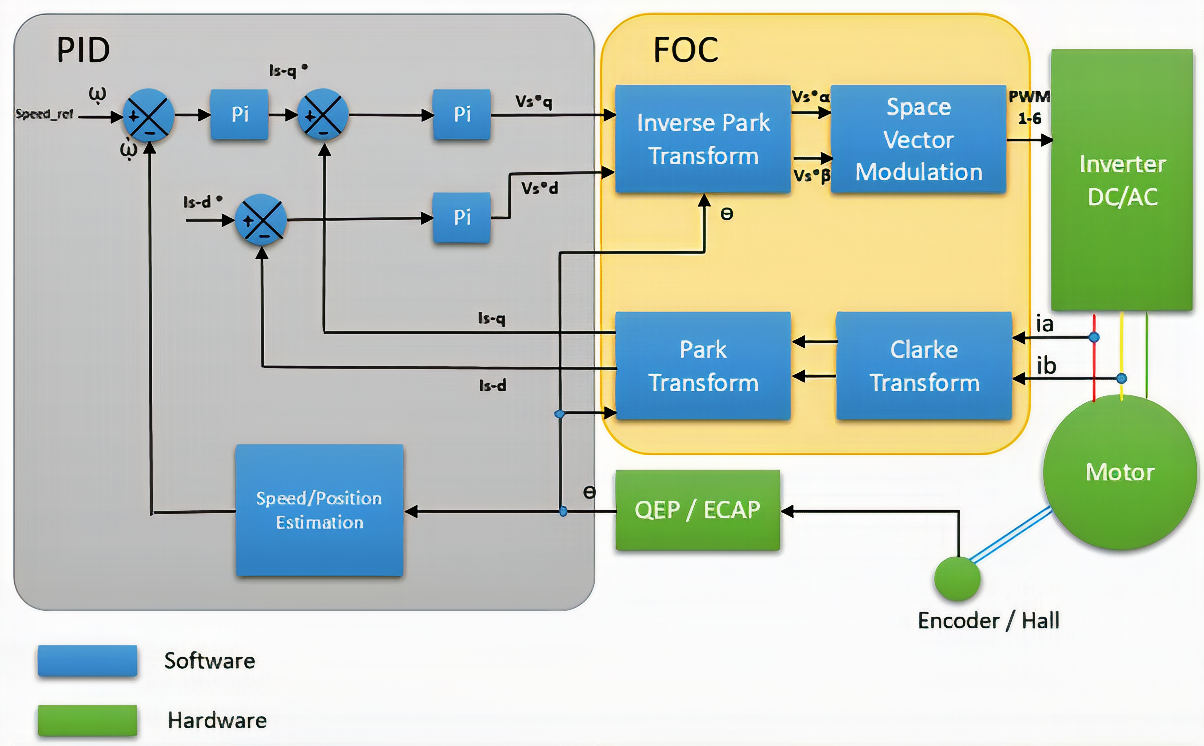
Di atas kertas, sistem kontrol motor berbasis field-oriented control (FOC) muncul seperti yang ditunjukkan pada Gambar 1.
klik untuk gambar ukuran penuh Gambar 1:Diagram menunjukkan komponen perangkat keras dan perangkat lunak dari sistem kontrol motor berbasis FOC. Sumber:Texas Instruments
Mari kita pahami masing-masing komponen perangkat lunak dan perangkat keras:
Inverter tiga fase :Inverter AC/DC tiga fase memberikan tegangan tiga fase ke motor PMSM/BLDC untuk penggerak. Dibutuhkan sinyal modulasi lebar-pulsa (PWM) dari blok modulasi vektor ruang (SVM).
Antarmuka QEP :Ini berinteraksi dengan encoder untuk mendapatkan posisi mekanis rotor dan meneruskannya ke blok lain.
Blok estimasi kecepatan/posisi :Seperti namanya, perhitungan untuk mendapatkan posisi dan kecepatan rotor dilakukan di blok ini.
Kontrol PID :Turunan integral proporsional (PID) adalah loop kontrol yang mengandalkan umpan balik dari motor dalam bentuk torsi. Dengan menghitung selisih antara torsi yang diinginkan dan torsi yang diterima dari blok transformasi Park, itu membuat koreksi.
Transformasi Clarke :Blok transformasi Clarke mengubah sistem koordinat arus stator (ia, ib) menjadi fluks dan torsi (d-q) menggunakan rumus transformasi Clarke. Kerangka acuan stasioner dari sistem tiga fase diubah menjadi sistem dua kuadran dalam kerangka acuan stasioner.
Transformasi taman dan invers Transformasi taman :Blok ini mengubah kerangka acuan stasioner menjadi kerangka acuan berputar dengan sistem dua fasa dengan sumbu ortogonal. Komponen ortogonal adalah d-q, yang masing-masing adalah sumbu langsung motor dan sumbu kuadrat. Blok transformasi Park terbalik muncul dalam gambar ketika tegangan keluaran stator harus diubah kembali ke referensi bingkai stasioner (referensi stator).
Modulasi vektor ruang :Merupakan teknik untuk menentukan sinyal PWM yang akan diterapkan pada motor. SVM mengambil vektor tegangan stator sebagai masukan dan menghasilkan tegangan keluaran tiga fasa sebagai keluaran.
Selanjutnya, kita akan menjelajahi bagaimana komponen ini digunakan dalam menggerakkan motor menggunakan algoritme FOC.
Tampilan alur kerja FOC
Untuk mengendalikan motor listrik tiga fasa, kita harus memberikan tegangan yang tepat ke motor dengan membaca arus fasa Ia, Ib, Ic. Tanpa memiliki kontrol pada mereka, tidak mungkin untuk membuat vektor fluks stator, yang berada pada 90 derajat terhadap vektor fluks rotor.
FOC adalah algoritme matematika-intensif yang membantu mencapai ini dan lebih banyak lagi dengan mudah, meskipun mengembangkan FOC cukup kompleks. Algoritma FOC mampu menyederhanakan kontrol kerangka acuan arus sinusoidal tiga fasa dengan menguraikannya menjadi kerangka acuan fluks dan torsi (d-q). Kedua komponen ini dapat dikontrol secara terpisah.
Gambar 1 menunjukkan encoder/Hall yang menentukan posisi rotor dan meneruskannya ke blok kecepatan/posisi. Nilai ini juga diumpankan ke Park dan inverse Park transform block. Pada saat yang sama, arus fasa (ia, ib) dari motor diumpankan ke blok transformasi Clarke. Arus fasa dari motor diubah oleh Clarke transform menjadi dua arus ortogonal (iα, iβ). Arus fasa yang baru dikonversi sekarang menandakan sebagai arus penghasil torsi dan arus penghasil fluks. Meskipun kami telah berhasil menguraikan arus fasa menjadi komponen fluks dan torsi, komponen tersebut masih berbentuk sinusoidal, yang membuatnya sulit untuk dikontrol karena terus berubah.
Tugas selanjutnya dari algoritma FOC adalah menghilangkan gelombang sinus, yang membutuhkan satu masukan penting—posisi rotor. Kita melihat pada diagram bahwa nilai ini juga diumpankan ke blok Park-transform. Dalam blok ini, triknya adalah berpindah dari kerangka acuan stasioner—dari sudut pandang stator—ke kerangka acuan yang berputar dari sudut pandang rotor. Sederhananya, blok transformasi Park mengubah dua arus AC (iα, iβ) menjadi arus DC. Itu membuatnya cukup mudah bagi blok PID untuk mengontrolnya sesuai keinginan.
Mari kita bawa blok PID ke dalam gambar sekarang. Input ke blok PID dari blok FOC adalah komponen Iq dan Id, torsi dan fluks. Dalam konteks EV, blok PID akan menerima referensi kecepatan saat pengemudi mengoperasikan throttle. Blok PID sekarang membandingkan dua nilai dan menghitung kesalahan. Kesalahan ini adalah nilai yang harus dimiliki blok PID untuk memutar motor. Output yang diberikan oleh blok PID adalah Vq dan Vd. Output ini mencapai invers Clarke and Park transform di mana kebalikan dari transformasi Clarke and Park terjadi. Blok transformasi Park terbalik mengubah kerangka acuan berputar menjadi kerangka acuan stasioner sehingga fase motornya dapat diubah.
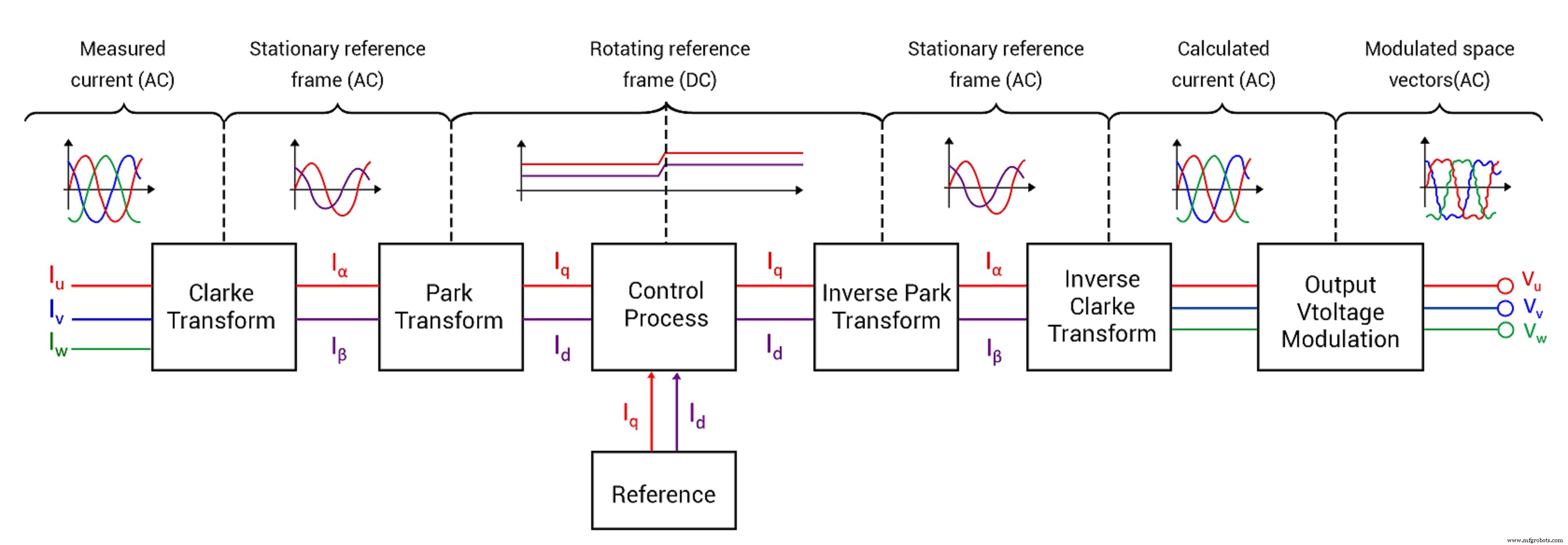
klik untuk gambar ukuran penuh Gambar 2:Keluaran dari PID mencapai invers transformasi Clarke and Park dimana kebalikan dari transformasi Clarke dan Park terjadi. Sumber:Texas Instruments
Pada langkah terakhir kontrol motor berbasis algoritma FOC, peran modulasi vektor ruang (SVM) sangat penting. Peran SVM adalah untuk menghasilkan sinyal PWM yang diumpankan ke inverter yang, pada gilirannya, menghasilkan tegangan tiga fase yang menggerakkan motor. Di satu sisi, SVM juga melakukan pekerjaan transformasi Clarke terbalik.
Inverter tiga fase memiliki enam transistor yang mengirimkan tegangan output ke motor. Pada dasarnya ada dua keadaan di mana output ini harus dengan transistor atas tertutup dan bawah satu terbuka atau sebaliknya. Dengan dua status dan tiga keluaran, total delapan status (2
3
) dapat dihitung. Ketika Anda memplot delapan keadaan ini, juga disebut vektor dasar, pada diagram bintang heksagonal, Anda akan menemukan bahwa setiap vektor yang berdekatan terpisah 60 derajat dalam hal perbedaan fase. SVM menemukan vektor rata-rata yang memberikan tegangan keluaran (Vkeluar ).
Kontrol motor EV de facto
FOC sebagai skema kontrol motor sangat diperlukan untuk desain EV. Dengan jenis pengoperasian motor tanpa suara dan halus yang dituntut oleh sebuah EV, FOC sangat cocok. Banyak OEM dan pengembang sistem kontrol sering mengubah algoritme FOC standar agar sesuai dengan persyaratan unik program EV mereka, tetapi konsep intinya tetap sama.
Kemajuan dalam MCU kelas otomotif, seperti keluarga mikrokontroler PIC18Fxx39 dari Microchip atau mikrokontroler real-time C2000 dari TI, mampu mempercepat pengembangan algoritme FOC untuk sistem kontrol motor EV.
>> Artikel ini awalnya diterbitkan di situs saudara kami, EDN .
Vaibhav Anand adalah eksekutif pemasaran digital di Embitel.Saurabh S. Khobe adalah insinyur tertanam di Embitel.
Konten Terkait:
Memecahkan tantangan desain kontrol motor multi-sumbu deterministik
Mengendalikan inverter traksi EV dengan aman
Solusi yang muncul meningkatkan manajemen daya kendaraan listrik
Mengidentifikasi persyaratan untuk pengembangan E/E
Pengontrol motor mengintegrasikan inti Arm Cortex-M0
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tersemat.



 Vaibhav Anand adalah eksekutif pemasaran digital di Embitel.
Vaibhav Anand adalah eksekutif pemasaran digital di Embitel.  Saurabh S. Khobe adalah insinyur tertanam di Embitel.
Saurabh S. Khobe adalah insinyur tertanam di Embitel.