Regulator Tegangan Transien dengan Peningkatan Stabilitas dan Penolakan Catu Daya
Abstrak
Regulator tegangan stabilitas tinggi (VR) diusulkan dalam makalah ini, yang mengintegrasikan peningkatan transien dan perlindungan arus lebih (OCP). Mempertimbangkan kinerja dan keunggulan area perangkat bertegangan rendah, sebagian besar bagian kontrol dari VR yang diusulkan disuplai oleh tegangan keluaran yang diatur, yang membentuk teknik daya mandiri (SPT) dengan penguatan catu daya (PSR). Selain itu, stabilitas dan respon transien ditingkatkan dengan teknik beban dinamis (DLT). Sebuah loop umpan balik arus lebih tertanam juga diadopsi untuk melindungi VR yang disajikan dari kerusakan dalam situasi kelebihan beban. VR yang diusulkan diimplementasikan dalam teknologi BCD 350 nm standar, yang hasilnya menunjukkan VR dapat terus bekerja dengan tegangan input 5,5–30 V, rentang beban 0–30 mA, dan kapasitor keluaran 0,1–3,3 μF. Regulasi saluran 2,98 μV/V dan regulasi beban 0,233 mV/mA dicapai dengan pembatasan arus 40 mA. PSR lebih baik daripada 64 dB hingga 10 MHz dengan kapasitor keluaran 0,1 μF.
Pengantar
Dalam desain sistem pada chip (SoC) skala nanometer modern, sub-blok yang berbeda biasanya memerlukan rel suplai yang berbeda untuk mencapai beberapa fungsi tertentu. Selain itu, seluruh sistem SoC mungkin perlu beroperasi di bawah rentang tegangan input yang lebar dan tetap memberikan kinerja tinggi yang tidak terpengaruh oleh perubahan kondisi suplai [1]. Dengan demikian, regulator tegangan rentang tegangan input lebar (VR) yang diimplementasikan dalam teknologi skala nanometer dapat menjadi salah satu kandidat yang paling cocok untuk aplikasi semacam ini. Dibandingkan dengan mitra switching-nya, seperti regulator switching dan pompa pengisian daya, VR linier memiliki keunggulan presisi tinggi, kebisingan keluaran rendah, dan ukuran yang ringkas. Sebagian besar VR linier menjalankan fungsi pengaturan tegangannya dengan suplai tegangan tunggal, tetapi hanya sedikit yang dapat mencapai kombinasi rentang catu daya yang lebar, kebisingan rendah, transien cepat, kemampuan beban tinggi, dan fitur perlindungan ekstra [2,3,4] .
Untuk mewujudkan jangkauan catu daya yang luas, pemanfaatan transistor yang tahan terhadap tekanan tegangan tinggi sangat diperlukan. Namun transistor jenis ini biasanya menempati area yang lebih luas dan memiliki kinerja yang lebih buruk dibandingkan dengan transistor standar. Dua solusi yang ada untuk mengurangi penggunaan transistor tegangan tinggi adalah metode preregulator [5, 6] dan metode transistor tegangan rendah tumpuk [7, 8]. Yang pertama menggunakan preregulator tambahan untuk menyediakan tegangan suplai internal untuk regulator inti. Yang terakhir mengimplementasikan transistor tegangan rendah bertumpuk yang dirancang dengan baik untuk menjaga tegangan terminal transistor dalam batas teknologi [7]. Namun, metode ini membatasi ruang kepala tegangan. Makalah ini mengadopsi teknik self-power (SPT) untuk mencapai rentang catu daya yang luas, yang berarti sebagian besar modul inti dalam loop regulasi disuplai oleh tegangan output yang diatur dari VR yang diusulkan [9]. Tanpa sirkuit tambahan, kinerja VR dapat ditingkatkan dengan SPT dan juga mengurangi jumlah perangkat bertegangan tinggi.
Dengan menggunakan SPT, tahap penguatan pertama dari penguat kesalahan (EA) disuplai oleh tegangan keluaran yang diatur dari VR yang diusulkan. Dengan hati-hati merancang tahap kedua EA, kebisingan frekuensi tinggi dari tegangan input memiliki dampak kecil pada tegangan output EA. Selanjutnya, arsitektur transistor daya tipe-N diadopsi dalam makalah ini. Oleh karena itu, regulator yang diusulkan memiliki penolakan catu daya (PSR) yang tinggi dan kinerja kebisingan yang baik [10,11,12,13,14,15].
Respons transien yang cepat juga merupakan indeks penting untuk mengukur kinerja VR [16,17,18,19,20], yang biasanya dicapai dengan menambahkan loop percepatan ekstra [21]. Dalam makalah ini, peningkatan transien diwujudkan dengan teknik beban dinamis (DLT). Selama prosedur respon transien, DLT memperkenalkan arus tambahan yang diubah sesuai dengan kondisi beban untuk bertindak sebagai beban dinamis, dimana overshoot dan undershoot dari tegangan output yang diatur dapat ditekan [9].
Dengan bantuan DLT, stabilitas loop dalam rentang beban yang lebar diperkuat karena arus beban tambahan dapat mengurangi variasi posisi kutub non-dominan. Untuk membuat loop stabil, kompensasi miller dengan resistor nulling juga digunakan untuk menghasilkan kutub frekuensi rendah dan nol ekstra untuk mengkompensasi kutub output. Selain itu, rangkaian resistor dengan kapasitor keluaran memperkenalkan nol lain untuk mengkompensasi kutub yang dihasilkan oleh kapasitansi gerbang parasit dari transistor daya [6, 9, 22, 23].
Terakhir, loop pembatas arus tertanam dirancang untuk menghindari kerusakan arus lebih dan meningkatkan keandalan VR yang diusulkan [9, 24,25,26,27].
Makalah ini disusun sebagai berikut. Prinsip dan mekanisme VR yang diusulkan diilustrasikan di bagian "Metode", termasuk sirkuit proteksi arus lebih (OCP), DLT dan sirkuit peningkatan transien, metode peningkatan stabilitas, dan analisis PSR. Hasil kinerja dan perbandingan dengan literatur lain yang diterbitkan terkait ditampilkan di Bagian "Hasil dan Diskusi". Bagian “Kesimpulan” menarik kesimpulan dari VR yang diusulkan.
Metode
Rangkaian rinci dari VR yang diusulkan ditunjukkan pada Gambar. 1.Transistor MOS tegangan rendah standar, transistor tegangan tinggi, BJT, transistor LDMOS deplesi tipe-N (laterally diffused MOS), dan dioda diberi nama Mn , HVn , Tn , DNn , dan Dn , masing-masing pada gambar, di mana n adalah nomor urut perangkat yang relevan.
Sirkuit terperinci dari VR yang diusulkan
VR yang diusulkan terutama mencakup lima sub-modul:bias arus, OCP, DLT, EA, dan tahap keluaran. Rangkaian bias arus memberikan arus bias untuk seluruh sistem regulator [12, 14]. Tegangan referensi dapat dibangkitkan dengan berbagai cara [1], dan rangkaian detailnya tidak ditampilkan di sini. Sebuah loop pembatas arus tertanam berfungsi sebagai sirkuit OCP untuk membatasi arus beban ke nilai preset. Sirkuit peningkatan transien, yang diimplementasikan oleh DLT, mencapai penekanan overshoot, dan undershoot melalui perubahan arus beban secara adaptif selama prosedur transien. Loop regulasi umpan balik negatif dibentuk oleh EA dan tahap daya keluaran untuk menyesuaikan tegangan keluaran. Dengan asumsi bahwa tegangan keluaran Vkeluar dan dengan demikian tegangan umpan balik VFB lebih rendah dari nilai yang diinginkan, tegangan gerbang transistor daya DN1 akan ditarik ke atas dengan bantuan loop regulasi untuk meningkatkan tegangan output, dan sebaliknya. Akhirnya, tegangan keluaran dapat stabil pada
Pada Gambar 1, dapat dilihat bahwa tegangan keluaran dari VR yang diusulkan juga memberi daya pada tahap penguatan pertama EA, yang disebut sebagai SPT. Dengan teknik power multiplexing ini, sebagian besar perangkat dalam loop regulasi dapat diimplementasikan oleh perangkat tegangan rendah. Dibandingkan dengan perangkat bertegangan tinggi, perangkat bertegangan rendah memiliki kinerja yang lebih tinggi, biaya lebih rendah, dan area yang lebih kecil, yang membuat loop regulasi yang diusulkan mencapai kemampuan regulasi yang baik jauh lebih mudah. Sedangkan untuk tahap kedua EA, Q3, dan Q4 ditambahkan untuk mengangkat ground supply rail, yang diadopsi untuk membatasi tegangan drain-source M7, VDS_M7 . Dengan kata lain, Q3 dan Q4 dapat mencegah M7 dari tekanan tegangan besar.
Demi kesederhanaan, rangkaian yang disederhanakan digunakan untuk menggambarkan ide-ide inovasi dalam analisis selanjutnya.
Sirkuit OCP yang Diusulkan
Gambar 2 menunjukkan rangkaian OCP yang diusulkan. Loop pembatas arus yang diusulkan dapat secara otomatis mengubah mode operasi sesuai dengan kondisi beban yang berbeda. Arus maksimum VR yang diusulkan dapat dibatasi dengan mengurangi tegangan gerbang transistor daya saat terjadi kelebihan beban.
Prinsip OCP yang diusulkan
Mekanisme usulan OCP adalah sebagai berikut. Transistor sampel DN2 secara proporsional merasakan arus yang mengalir melalui DN1 yang kira-kira sama dengan arus beban IMuat , yang membuat tegangan jatuh di RS1 , VRS1 , mencerminkan tingkat arus beban. Sekali VRS1 mencapai tegangan nyala QS1, HV8, dan HV9 akan membentuk cermin arus untuk mem-bypass arus dari EA tahap kedua. Kemudian, tegangan gerbang DN1 dapat ditarik ke bawah untuk membatasi arus beban ke nilai preset, yang dapat dinyatakan sebagai
dimana N adalah rasio faktor ukuran DN1 ke DN2. Tujuan Q5 dan HV6 adalah untuk memberikan tegangan bias yang tepat ke HV7 dan dengan demikian melindungi QS1 dari kondisi tegangan berlebih.
Ada loop umpan balik negatif tertanam di OCP yang diusulkan. Penguatan loop T dan kutub dominan pdominan dari loop batas saat ini dapat diberikan oleh,
dimana gm_DN2 dan gm_QS1 adalah transkonduktansi DN2 dan QS1, masing-masing. Rgerbang_OC (gm_HV10ro_HV10ro_M10 ) || ro_M7 || ro_HV9 dan CgerbangCgs_DN1 adalah resistansi keluaran ekivalen dan kapasitansi pada node gerbang transistor daya DN1 ketika terjadi arus lebih. Ketika VR yang diusulkan biasanya beroperasi tanpa arus lebih, HV9 berada di wilayah cutoff, dan dengan demikian, resistansi keluaran ekivalen pada simpul gerbang DN1 bernama Rgerbang dapat dinyatakan sebagai [(gm_HV10ro_HV10ro_M10 ) || ro_M7 ].
DLT yang Diusulkan dan Sirkuit Peningkatan Sementara
Gambar 3 menunjukkan rangkaian peningkatan transien menggunakan DLT. Karena arus beban sebanding dengan Vgs_DN1 dan berbanding terbalik dengan Vsg_M9, arus yang mengalir melalui M9 lebih besar pada kondisi beban ringan dan mendekati nol pada kondisi beban berat. Oleh karena itu, ketika arus beban meningkat, arus yang berkurang dapat dimasukkan ke dalam beban keluaran total. Dengan metode ini, rangkaian ini dapat disetarakan dengan beban dinamis, yang dapat membantu peningkatan transien dan peningkatan stabilitas loop regulasi.
Sirkuit peningkatan transien yang diusulkan
Prinsip operasi peningkatan transien rinci adalah sebagai berikut. Jika arus beban mengalami penurunan mendadak, arus yang mengalir melalui transistor daya DN1 tidak akan langsung berubah karena keterbatasan kemampuan penyesuaian loop dan laju perubahan tegangan. Arus ini, yang ditunjukkan pada Gambar 4a sebagai jalur kuning, akan menyebabkan overshoot pada tegangan output dan dengan demikian meningkatkan penurunan tegangan pada RS2 dan M9. Kemudian arus tambahan mengalir melalui RS2 dan M9, ditunjukkan pada Gambar. 4a sebagai jalur biru, dihasilkan pada output yang diatur untuk membatalkan arus jalur kuning yang tidak diinginkan. Oleh karena itu, lonjakan tegangan keluaran dikurangi secara efektif.
Respons sementara dari VR yang diusulkan. a perubahan arus beban berat ke ringan. b perubahan arus beban ringan ke berat
Gambar 4b menunjukkan kasus perubahan arus beban ringan ke berat, di mana undershoot terjadi pada output yang diatur dan kemudian arus mengalir melalui RS2 dan M9 berkurang. Ini bisa setara dengan memberikan pengurangan beban arus, sehingga arus bersih yang mengalir melalui transistor daya DN1 meningkat, dan penekanan tegangan undershoot dapat dicapai.
Untuk melindungi M9 dari arus lebih, QS2 dan D1 ditambahkan. Saat tegangan melintasi RS2 lebih besar dari tegangan nyala QS2, arus ekstra akan mengalir ke QS2 dan D1. Arus maksimum di M9 diatur pada
Tujuan D1 adalah untuk mencegah QS2 jatuh ke daerah penguat terbalik dan mengalirkan arus balik di dalamnya, yang merupakan keadaan abnormal dari fungsi batas arus M9.
Peningkatan Stabilitas VR yang Diusulkan
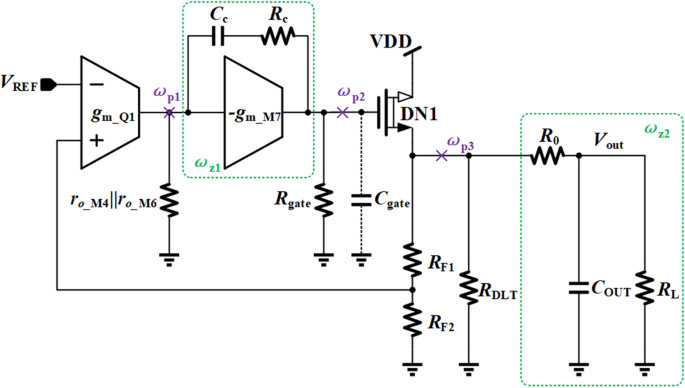
Seperti yang ditunjukkan pada Gambar. 5, ada tiga kutub ωp1 , ωp2 , dan ωp3 , dan dua nol ωz1 dan ωz2 dalam loop kontrol, dan penguatan loop dari VR yang diusulkan adalah
$$ {A}_{\mathrm{Vloop}}={A}_O\beta $$ (6)
Distribusi kutub dan nol dari VR yang diusulkan
dimana AO adalah gain loop terbuka dari VR, dan β adalah koefisien umpan balik,
dimana ACD0 1 adalah penguatan frekuensi rendah dari tahap daya yang beroperasi sebagai pengikut tegangan dan AE0 adalah penguatan frekuensi rendah dari EA,
dimana RDLT adalah resistansi ekivalen dari rangkaian peningkatan transien; Ckeluar adalah kapasitor keluaran dari VR yang diusulkan.
Karena kapasitor kompensasi CC diperbesar oleh (gm_M7Rgerbang ) karena efek penggilingan pada simpul p1, kutub ωp1 adalah kutub yang dominan. Tiang kedua harus ωp3 , karena Ckeluar biasanya dalam kisaran beberapa mikrofarad. Meskipun kapasitor parasit Cgerbang relatif besar, masih lebih kecil dari kapasitansi ekivalen pada simpul p1 dan kapasitor keluaran. Selain itu, hambatan pada simpul p2 hanya 1/gm_M7 . Oleh karena itu, tiang ωp2 terletak pada frekuensi tinggi. Angka nol ωz1 adalah untuk membatalkan kutub frekuensi tengah ωp3 . Resistor R0 menghasilkan nol ωz2 untuk mengkompensasi kutub parasit internal ωp2 . Stabilitas VR yang diusulkan dapat ditingkatkan sebagai resistor R0 meningkat. Namun, resistor R0 akan meningkatkan kesalahan tegangan keluaran karena jatuh tegangan yang disebabkan oleh arus beban. Oleh karena itu, resistor R0 harus diatur dalam nilai yang wajar untuk membuat tradeoff yang baik antara presisi tegangan output dan stabilitas loop.
Pada regulator tegangan konvensional tanpa DLT, kutub pada simpul keluaran akan berada pada frekuensi yang berbeda karena perubahan arus beban yang disebabkan oleh variasi transkonduktansi transistor daya. Saat arus beban meningkat, transkonduktansi transistor daya gm _DN1 akan meningkat, dan dengan demikian kutub keluaran akan bergerak menuju frekuensi tinggi sementara nol dan kutub lainnya tetap pada posisi yang sama, seperti yang ditunjukkan pada Gambar 6a. Hal ini dapat mempersulit kompensasi frekuensi sistem dan memperlambat respon transien dalam kondisi beban ringan. Lebih serius lagi, sistem mungkin tidak stabil.
Respon frekuensi regulator tegangan. a Pengatur tegangan tanpa teknik beban dinamis. b Regulator tegangan yang diusulkan dengan teknik beban dinamis
Dengan bantuan DLT yang diusulkan, VR yang disajikan memiliki stabilitas yang lebih baik dengan beban yang berbeda. Seperti yang telah dianalisis sebelumnya, arus yang melalui rangkaian beban dinamis menurun seiring dengan meningkatnya arus beban dalam keadaan tunak dan sebaliknya. Karena arus ini disediakan oleh DN1, ia dapat menekan variasi transkonduktansi DN1 dalam rentang arus beban yang lebih luas, yang berguna untuk stabilitas sistem dan keteguhan bandwidth selama rentang beban yang lebih luas dengan menggunakan DLT yang diusulkan. Respon frekuensi dari VR yang diusulkan ada pada Gambar 6b, yang dapat menjamin stabilitas dengan respon transien yang cepat.
Kapasitor keluaran mengatur posisi nol ωz2 . Dengan menempatkan kutub nol secara wajar, sistem akan memiliki stabilitas yang lebih baik dengan C . yang berbeda keluar .
Analisis PSR dari VR yang Diusulkan
PSR merupakan salah satu parameter penting untuk mengukur kinerja regulator tegangan, dan mengacu pada kemampuan penolakan terhadap riak frekuensi tinggi dan kebisingan yang timbul dari tegangan suplai. Metode analisis PSR yang diusulkan oleh Gupta 12 diadopsi di bagian ini, yang ide utamanya adalah menyederhanakan seluruh sistem regulator menjadi model pembagi tegangan. Seperti yang ditunjukkan pada Gambar. 7, ada dua jalur kebisingan dari Vdd untuk Vkeluar :jalur 1 secara langsung mentransfer kebisingan dari saluran pembuangan transistor daya DN1 ke Vkeluar; jalur 2 adalah dari tahap kedua EA ke gerbang transistor daya DN1. Efek dari jalur 2 dapat dinyatakan sebagai
Seperti yang ditunjukkan pada (15), Ajalur2 adalah cukup kecil dengan bantuan SPT yang diusulkan dan struktur cermin arus cascode. Hal ini membuat pengaruh jalur 1 dominan dalam analisis PSR.
Model PSR yang disederhanakan dari VR yang diusulkan ditunjukkan pada Gambar. 8, di mana ro_DN1 adalah resistansi keluaran transistor daya DN1 yang memperhitungkan jalur noise 1, sumber arus yang dikontrol berasal dari jalur noise 2, ZB terdiri dari RF1 , RF2 , R0 , dan Ckeluar bertindak sebagai filter pada frekuensi tinggi, dan ZSH_FB adalah impedansi ekivalen termasuk fungsi loop umpan balik negatif. ZSH_FB dapat diberikan oleh
Dengan sengaja mengatur penguatan intrinsik HV10 jauh lebih besar daripada transistor daya DN1, gm_DN1ro_DN1Ajalur2 <<1 dapat dicapai, dan dengan demikian sumber arus yang dikendalikan dapat diabaikan. Ekspresi PSR dapat disederhanakan lebih lanjut sebagai
Sejak ZB dan ZSH_FB akan berubah dengan variasi frekuensi, maka perlu dilakukan analisis karakteristik frekuensi PSR.
Frekuensi Rendah
Pada frekuensi rendah, penguatan EA sangat tinggi, dan Ckeluar dapat diperlakukan sebagai sirkuit terbuka. Jadi, ZB>> ZSH_FB dan PSR dapat ditulis sebagai
Impedansi ZSH_FB akan meningkat karena gain loop berkurang pada frekuensi menengah. Pada tahap ini, ZSH_FB masih kecil, dan PSR terutama dipengaruhi oleh penguatan loop. Berkenaan dengan (7), PSR dapat dinyatakan sebagai
Seperti yang ditunjukkan pada (20), PSR semakin buruk, dan kebisingan tegangan output lebih serius sementara frekuensi meningkat dalam frekuensi penguatan kesatuan.
Frekuensi Tinggi
Karena meningkatnya frekuensi, ZSH_FB menjadi besar dan akhirnya akan mendekati 1/gm_DN1 . Impedansi Ckeluar menjadi lebih kecil, tapi masih jauh lebih besar dari R0 . Jadi R0 dapat dihilangkan seperti sebelumnya. PSR frekuensi tinggi tergantung pada pembagian tegangan antara ro_DN1 dan 1/gm_DN1 sejajar dengan Ckeluar , yang dapat diwakili oleh
Pada frekuensi tinggi, kebisingan pada tegangan keluaran dapat ditekan secara signifikan karena efek Ckeluar .
Seperti yang telah dianalisis sebelumnya, kemampuan anti-noise yang baik dalam rentang frekuensi penuh dari VR yang diusulkan dijamin oleh tiga aspek. Pertama, gain loop tinggi diadopsi; Kedua, SPT membuat kebisingan catu daya berdampak kecil pada gerbang transistor daya; Ketiga, kapasitor keluaran Ckeluar dapat meningkatkan PSR pada frekuensi tinggi dengan properti penyaringan.
Hasil dan Diskusi
VR yang diusulkan telah diimplementasikan dalam teknologi BCD 0,35-μm standar. Foto chip dari regulator yang dibuat ditunjukkan pada Gambar. 9, yang area inti aktif dari VR adalah 290 μm × 900 μm.
Foto chip dari VR yang diusulkan
Tegangan keluaran yang diatur dari VR yang diusulkan adalah 5 V dengan tegangan catu daya berkisar antara 5,5 hingga 30 V. Kapasitor keluaran adalah kapasitor keramik murah. Kapasitansi kapasitor keluaran dapat diatur dari 100 nF hingga 3,3 μF.
Gambar 10 menunjukkan respon frekuensi VR yang diusulkan pada kondisi beban yang berbeda dengan kapasitor keluaran 100 nF dan 3,3 μF. LDO yang diusulkan dapat mempertahankan kestabilan dalam berbagai nilai kapasitor keluaran, dan bentuk gelombang dari respons frekuensi loop memiliki perbedaan yang sangat kecil antara arus beban 0 dan 30 mA, yang diuntungkan dari DLT yang diusulkan yang dianalisis sebelumnya.
Respons frekuensi loop dari VR yang diusulkan dengan nilai I . yang berbeda Muat dan Ckeluar kondisi. a CKELUAR =100 nF, b CKELUAR =3,3 훍F. Garis merah dan hijau mewakili IMuat dari 0 A dan 30 mA, masing-masing
Hasil verifikasi PSR dengan kapasitor keluaran 0.1 μF ditunjukkan pada Gambar 11, dimana diperoleh 110 dB pada frekuensi rendah dan lebih baik dari 64 dB hingga 10 MHz. Pada frekuensi rendah, VR yang diusulkan memiliki PSR yang baik karena gain loop yang tinggi. PSR menjadi miskin dalam frekuensi kesatuan-gain karena tiang yang didominasi ωp . Kapasitor keluaran Ckeluar meningkatkan karakteristik PSR pada frekuensi tinggi. Hasil tersebut menunjukkan bahwa ini konsisten dengan analisis sebelumnya, dan VR yang diusulkan memperoleh PSR yang lebih baik dalam rentang frekuensi penuh.
PSR dari VR yang diusulkan
Hasil pengaturan saluran dari VR yang diusulkan ditunjukkan pada Gambar. 12. Pada rentang tegangan input 5,5 hingga 30 V, tegangan output hanya bervariasi 73,53 μV, yang menghasilkan pengaturan saluran hanya 2,98 μV/V. Ini menegaskan efektivitas SPT yang diusulkan.
Regulasi garis dari VR yang diusulkan
Gambar 13 menunjukkan respon transien tegangan keluaran akibat arus beban yang berbeda. Lonjakan dan penurunan tegangan dari tegangan keluaran yang diatur adalah sekitar 43 mV, 65 mV, 83 mV ketika arus beban berubah dari 0 menjadi 18 mA, 28 mA, dan 32 mA, masing-masing. Hal ini menghasilkan regulasi beban sebesar 0,233 mV/mA, yang terutama disebabkan oleh R0 untuk stabilitas dengan berbagai kapasitansi keluaran.
Bentuk gelombang respons transien dari VR yang diusulkan karena langkah arus beban yang berbeda. a 0 hingga 18 mA; b 0 hingga 28 mA; c 0 hingga 32 mA
OCP terukur ditunjukkan pada Gambar 14. Untuk memverifikasi efektivitas OCP, hubung singkat diadopsi pada Gambar 14a. Seperti ditunjukkan pada Gambar 14a, ketika arus lebih terjadi dengan tegangan keluaran ditarik ke tanah, arus keluaran dari VR yang diusulkan dipertahankan pada sekitar 40 mA. Gambar 14b mengilustrasikan respons transien antara arus lebih dan beban normal, yang menunjukkan bahwa VR yang diusulkan memiliki kemampuan pemulihan sendiri saat kelebihan beban keluar.
Pengukuran OCP dari VR yang diusulkan. a keluaran hubung singkat; b transien antara arus lebih dan beban normal
Tabel 1 memberikan perbandingan kinerja LDO yang diusulkan dan beberapa LDO lain yang diterbitkan sebelumnya. Sebagai perbandingan, LDO ini memiliki jalur regulasi dan PSR terbaik, yang diuntungkan dari SPT yang diusulkan. Area aktif akan semakin berkurang jika dibuat dalam proses yang lebih maju.
Tabel 2 memberikan perbandingan kinerja lain yang berfokus pada LDO yang juga memiliki jangkauan catu daya yang luas. Dengan bantuan DLT dan SPT yang diusulkan, pekerjaan ini memiliki regulasi jalur terbaik dan jangkauan catu daya terluas dibandingkan dengan LDO lainnya. Fungsi OCP tambahan membuat pekerjaan ini lebih kompetitif dan andal.
Kesimpulan
SPT VR dengan stabilitas tinggi dengan DLT dan OCP diimplementasikan dalam proses BCD 0,35-μm standar. Dengan bantuan SPT, sebagian besar loop regulasi disuplai oleh tegangan output yang diatur, yang bermanfaat untuk stabilitas dan peningkatan PSR. DLT yang diusulkan sangat membantu untuk respon transien dan stabilitas. Selain itu, sirkuit OCP tertanam dapat mencegah VR yang disajikan dari kerusakan oleh kelebihan beban atau korsleting. Regulasi linier dari VR yang diusulkan adalah 2,98 μV/V dengan VDD dari 5,5 hingga 30 V sedangkan tegangan keluaran yang diatur adalah 5 V, dan regulasi beban adalah 0,233 mV/mA dengan arus beban dari 0 A hingga 30 mA. Tegangan overshoot dan undershoot selama perubahan arus beban juga kecil dengan menggunakan rangkaian peningkatan transien yang disajikan. PSR pada frekuensi rendah adalah 110 dB, dan lebih baik dari 64 dB hingga 10 MHz. Stabilitas loop tinggi dapat dicapai dalam berbagai kapasitor keluaran dan arus beban, dan dengan demikian VR yang diusulkan cocok untuk aplikasi yang membutuhkan kinerja dan keandalan tinggi di bawah variasi kapasitor keluaran dan arus beban.
Ketersediaan Data dan Materi
All data generated or analysed during this study are included in this published article.