Servoradar
Komponen dan persediaan
 | | × | 1 | |
 | | Sensor Ultrasonik - HC-SR04 (Generik) |
| × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
Tentang proyek ini
Seperti yang kita ketahui untuk mendeteksi satelit, benda langit, sinyal asteroid, dll dari luar angkasa, kita perlu memiliki radar untuk berbagai tujuan. nasa menggunakan banyak radar untuk keperluan pabrik dan ruang angkasa kita. Sebenarnya proyek saya adalah radar yang menampilkan 'objek terdeteksi' pada monitor serial ketika sebuah objek berada dalam jarak 10cm dari radar. ini bekerja menggunakan dasar gelombang ultrasonik yang bergerak dalam ledakan sonik sehingga kita memerlukan sensor ultrasonik .

selanjutnya untuk pemrograman dan eksekusi kode untuk membuatnya bekerja kita membutuhkan Arduino (papan apa saja tetapi coba gunakan UNO); menurut saya arduino sangat cocok untuk proyek ini karena memiliki jenis penyimpanan dan tampilan data yang bagus. Saat mendengar tampilan kata, kita juga perlu menggunakan monitor serial. sekarang untuk memutar sensor untuk menyebarkan gelombangnya dan mengumpulkan kembali untuk menghitung jarak, kita memerlukan servo. sekarang untuk komunikasi antar perangkat keras kita memerlukan Kabel jumper dan papan tempat memotong roti.
Sekarang mari kita lihat cara kerjanya sensor ultrasonik mengirim gelombang dan yang membuat ledakan ultrasonik 8 siklus per menit dan kemudian menerimanya menggunakan pin kemudian memberikan data ke papan yang menghitung jarak dan kemudian mengunggahnya di monitor serial. servo terus berputar dari 0 derajat hingga 180 derajat dan arduino terus menghitung sudut yang dipindahkan dan mengunggahnya ke monitor serial. Ketika sensor ultrasonik mendeteksi bahwa jaraknya kurang dari 10 cm maka arduino mengetahui suatu objek dan mencetak "objek terdeteksi" pada serial monitor.
menggunakan dasar ini, servoradar arduino saya berfungsi.

Jika Anda menyukai radar saya, tolong hormati proyek saya dan jika radar tidak berfungsi dengan baik atau ada kesalahan menurut Anda, silakan beri tahu saya di komentar dan saya akan menghapus kesalahannya.
Kode
kode serverArduino
diagram mungkin sedikit berbeda dari kode jadi silakan coba mengikuti kode#include Servo myservo;int Ang =0;durasi panjang;int jarak;const int trigpin =8;const int echopin =11;pengaturan batal() { Serial.begin(9600); myservo.attach(3); pinMode(trigpin, OUTPUT); pinMode(echopin, INPUT);}void loop() { for (Ang =0; Ang <=180; Ang +=1) { myservo.write(Ang); penundaan (15); } untuk (Ang =180; Ang>=0; Ang -=1) { myservo.write(Ang); penundaan (200); digitalWrite(trigpin, RENDAH); delayMicroseconds(2); digitalWrite(trigpin, TINGGI); delayMicroseconds(15); digitalWrite(trigpin, RENDAH); durasi =pulseIn(echopin, TINGGI); jarak =durasi * 0,034 / 2; Serial.println("Jarak"); Serial.println(jarak); Serial.println("Sudut"); Serial.println(Ang); if (jarak <=10) Serial.println("objek terdeteksi"); }}
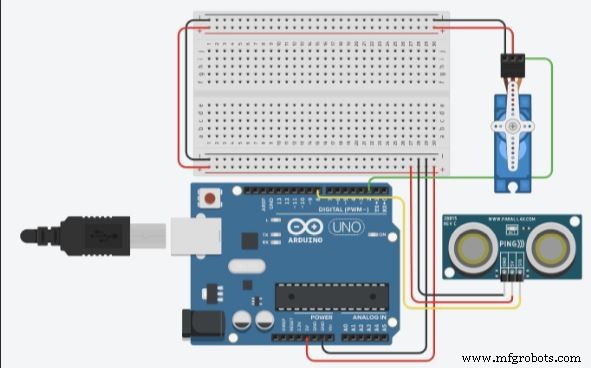
Skema
hubungkan berikut ini
Sensor Arduino
VCC - 5V
tiang pancang - 8
echopin - 11
gnd - gnd
servo arduino
pin positif - 5V
pin negatif - gnd
pin - 3
silakan ikuti yang di atas