

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 |
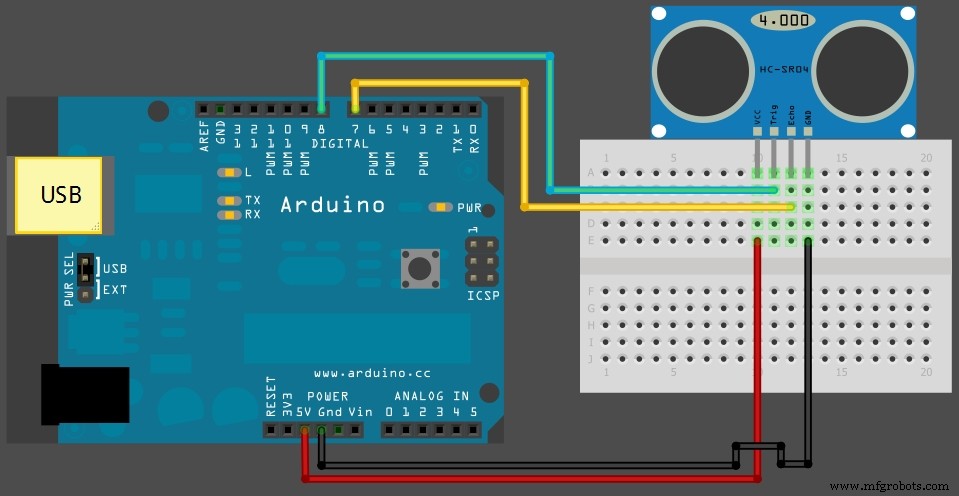
Visualisasi Layar Radar untuk HC-SR04
Kode Arduino:
Mengirim pembacaan sensor untuk setiap derajat yang digerakkan oleh nilai servo yang dikirim ke port serial untuk diambil oleh Processing
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
Kode Pemrosesan:
Memetakan area yang dilihat HC-SR04 dari tampilan atas ke bawah. Mengambil dan menampilkan 2 bacaan, satu kiri ke kanan dan satu kanan ke kiri. Menampilkan rata-rata dari 2 bacaan
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
Setiap pertanyaan dipersilakan!
Github:https://github.com/faweiz
Portofolium:https://portfolium.com/faweiz
Linkedin:https://www.linkedin.com/in/faweiz
/*https://www.hackster.io/faweiz/arduino-radarRadar Visualisasi Layar untuk HC-SR04Mengirim pembacaan sensor untuk setiap derajat yang digerakkan oleh servonilai yang dikirim ke port serial untuk diambil oleh Processing*/#include#include #define TRIGGER_PIN 2 // Arduino pin 2 diikat ke trigger pin pada sensor ultrasonik.#define ECHO_PIN 3 // Arduino pin 3 diikat ke echo pin pada sensor ultrasonik.#define MAX_DISTANCE 150 // Jarak maksimum yang ingin kita ping (dalam sentimeter). Jarak sensor maksimum dinilai pada 400-500cm.#define SERVO_PWM_PIN 9 //set servo ke pin Arduino 9 // berarti -angle .. angle#define ANGLE_BOUNDS 80#define ANGLE_STEP 1 int angle =0; // arah gerakan servo // -1 =mundur, 1 =maju int dir =1; Servo myservo;Sonar Ping Baru(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); void setup() { Serial.begin(9600); // inisialisasi port serial:myservo.attach(SERVO_PWM_PIN); //set servo ke pin Arduino 9} void loop() { delay(50); // kita harus menormalkan ulang ke nilai positif, karena sudutnya dari -ANGLE_BOUNDS .. ANGLE_BOUNDS // dan nilai servo harus positif myservo.write(angle + ANGLE_BOUNDS); // baca jarak dari sensor dan kirim ke serial getDistanceAndSend2Serial(angle); // hitung sudut jika (sudut>=BATASAN_SUDUT || sudut <=-BATAS_SUDUT) { dir =-dir; } sudut +=(dir * ANGLE_STEP); } int getDistanceAndSend2Serial(sudut int) { int cm =sonar.ping_cm(); Serial.print(sudut, DEC); Serial.print(","); Serial.println(cm, DES); }
Proses manufaktur
Komponen dan persediaan Arduino UNO × 1 Sensor Pencari Jangkauan ToF SparkFun - VL6180 VL53L0X untuk jarak jauh dan VL6180X untuk jarak dekat. disini saya menggunakan VL6180X × 1 motor servo × 1 Aplikasi dan layanan online Arduino IDE Memproses
Komponen dan persediaan Arduino MKR1000 × 1 Klik Lingkungan MikroE × 1 Alat dan mesin yang diperlukan Kabel jumper Adafruit Wanita/Wanita Aplikasi dan layanan online Arduino IDE WolkAbout IoT Platform Tentang proyek ini
Komponen dan persediaan Arduino UNO × 1 Sensor Kedekatan × 1 Kabel jumper (generik) × 1 Tentang proyek ini Halo, teman-teman! Hari ini saya akan menunjukkan kepada Anda bagaimana menghubungkan sensor IR dengan Arduino UNO. Jadi mari kita mulai! Komp
Komponen dan persediaan Arduino MKR GSM 1400 × 1 SORACOM Air Global IoT SIM × 1 Arduino MKR MEM Shield × 1 Suhu dan Kelembaban GY21 × 1 Sensor Sinar UV SI1145 Adafruit × 1 Sensor Kelembaban Tanah SparkFun (dengan Terminal Sekrup) × 1