Jenis Robot Industri dan Kegunaannya yang Berbeda
Temukan berbagai jenis robot industri dan kemampuannya yang unik. Dapatkan pemahaman yang jelas tentang setiap jenis penggunaan dan aplikasi robot hari ini:lengan robot, robot bergerak, drone udara, robot bawah air, dan cobot.
Bagaimana Anda memutuskan jenis robot industri mana yang paling cocok?
Ada begitu banyak jenis robot di pasaran - bagaimana Anda tahu jenis mana yang harus digunakan? Seperti banyak masalah desain dan rekayasa, "bentuk mengikuti fungsi". Artinya, jenis robot yang dibutuhkan tergantung pada fungsi yang dimaksudkan. Apakah robot akan diikat ke lantai atau permukaan lain, atau harus mobile? Berapa unit per jam yang harus dapat diproses oleh robot? Berapa berat maksimum yang harus diangkat robot? Jika robot diikat di satu tempat, berapa ukuran amplop kerja? Apakah amplop kerja berbentuk persegi panjang atau lingkaran? Menjawab pertanyaan-pertanyaan ini akan mempersempit pilihan Anda dengan cepat dan memungkinkan Anda memilih jenis robot industri yang ideal untuk tujuan Anda.
Dalam artikel ini, kami memeriksa berbagai jenis robot, kekuatan dan kelemahannya, serta cara menentukan kegunaannya.
Isi artikel ini
- Robot Stasioner (Lengan Robot)
- Robot Seluler Otonom
- Robot Terbang (Drone Udara)
- Robot Bawah Air
- Cara mencari jenis robot yang ideal untuk organisasi Anda
Robot Stasioner (Lengan Robot)
Ada tujuh jenis utama robot stasioner yang tersedia di pasaran. Yang kami maksud dengan stasioner adalah robot yang dibaut ke lantai, langit-langit, atau permukaan lain - mereka tidak bergerak. Umumnya, robot stasioner adalah lengan robot yang dirancang untuk tugas-tugas seperti memilih dan menempatkan, menyortir, merakit, mengelas, dan menyelesaikan.
Di sini kami mempertimbangkan berbagai jenis lengan robot, dan karakteristik serta kegunaannya.
- Lengan Robot Artikulasi
- Robot Kartesius atau Persegi Panjang
- Robot SCARA
- Robot Kutub atau Bulat
- Robot Delta atau Paralel
- Silinder
- Robot/Cobot Kolaboratif
Lengan Robot Artikulasi
Keuntungan: Gerakan paling fleksibel dari semua jenis lengan robot. Bisa sangat kuat, mampu mengangkat benda berat.
Kekurangan: Mungkin perlu dipagari. Lebih lambat dari beberapa lengan robot lainnya. Lebih mahal dari lengan robot lainnya. Membutuhkan sistem kontrol yang lebih canggih.
Dibandingkan dengan jenis lengan robot lainnya, gerakan lengan robot artikulasi paling mirip dengan lengan manusia. Lengan artikulasi yang khas memiliki enam sumbu, atau sambungan. Mungkin lebih sedikit atau lebih, tergantung pada aplikasi dan pabrikannya. Semakin banyak sendi yang dimiliki robot, semakin halus dan semakin tidak “seperti robot” gerakannya. Fleksibilitas gerak ini dijelaskan oleh Derajat Kebebasan.
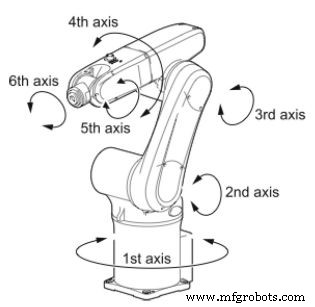
Fakta menarik: Perancang tangan buatan menganggap tangan manusia memiliki 27 derajat kebebasan. Sebuah lengan manusia memiliki 7 derajat kebebasan, untuk total gabungan antara lengan manusia dan tangan 34 derajat kebebasan.
Untuk meniru semua cara halus lengan dan tangan manusia dapat bergerak akan terlalu mahal dan rumit untuk robot industri. Secara umum disepakati bahwa 6 derajat kebebasan dalam lengan robot industri sudah cukup bagi mereka untuk melakukan hampir semua tugas yang diperlukan.
Robot tidak akan bisa bermain piano, tetapi tidak perlu!
Tergantung pada aplikasinya, lengan robot dapat dilengkapi dengan gripper, yang setara dengan robot tangan. Biasanya, gripper robot jauh lebih sederhana daripada tangan manusia. Kadang-kadang mereka mungkin sesederhana cangkir hisap atau elektromagnet. Atau, mungkin gripper tiga jari yang lembut dapat digunakan untuk mengambil benda-benda halus, seperti produk segar atau telur. Ada banyak jenis gripper yang berbeda, dan belum ada satu pun robot gripper yang dapat menangani semua aplikasi.
Atau, End of Arm Tooling (EoAT) seperti yang disebut, dapat menjadi semacam alat, mungkin alat berputar yang memegang mata bor, atau jenis lain dari sedikit, untuk deburring, penggilingan atau penggilingan. Ada banyak kemungkinan, termasuk EoAT khusus untuk pengelasan, pengecatan, pengamplasan, pemotongan laser, dan banyak lagi.
Robot artikulasi sangat fleksibel karena semua sambungannya dapat berputar, berbeda dengan sambungan linier atau translasi, yang hanya dapat bergerak dalam garis lurus.
Robot artikulasi digunakan dalam aplikasi seperti pick and place, pengelasan busur, pengelasan titik, pengemasan, perawatan mesin, dan penanganan material. Kemampuan untuk menghasilkan busur (atau pola serupa) di tempat yang sulit dijangkau membuat robot artikulasi menjadi kandidat yang baik untuk industri otomotif dan manufaktur lain yang membutuhkan kemampuan ini.
Secara historis, robot lengan artikulasi yang besar dan kuat yang mampu mengambil benda dengan berat satu ton atau lebih tidak dilengkapi dengan sensor yang memungkinkan mereka untuk menyadari lingkungan mereka. Jika seseorang menghalangi robot seperti itu, mereka bisa terluka parah atau bahkan terbunuh.
Akibatnya, lengan robot seperti itu perlu dipisahkan ke dalam ruangnya sendiri. Hanya personel yang memenuhi syarat yang sepenuhnya memahami fungsi robot yang diizinkan memasuki ruang berdinding atau berpagar di mana robot tersebut beroperasi.
Namun, jika lengan robot artikulasi dilengkapi dengan sensor dan perangkat lunak kontrol yang sesuai, ia dapat beroperasi dengan aman di sekitar orang. Misalnya, menggunakan visi komputer dengan kamera atau mungkin sensor LiDAR, jika robot tersebut merasakan ada sesuatu yang menghalangi jalannya, atau bahkan seseorang atau objek mendekat dan tidak menghalangi, robot dapat melambat atau berhenti. Sensor lain dapat mendeteksi tabrakan – jika lengan menabrak sesuatu, itu akan berhenti dan/atau berbalik arah. Biasanya, lengan artikulasi yang aman untuk dioperasikan bersama orang dirancang untuk dibatasi kecepatan dan kekuatannya.
Robot Kartesius atau Persegi Panjang
Keuntungan: Sistem kendali sederhana. Tergantung pada modelnya, dapat mengangkat benda yang sangat berat. Tepat. Kaku di ketiga sumbu. Lebih murah daripada senjata artikulasi.
Kekurangan: Tidak dapat melakukan gerakan rotasi.
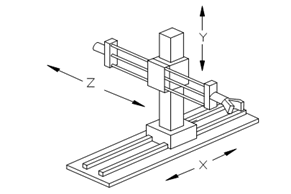
Robot-robot ini menggunakan sistem koordinat Cartesian (X, Y, dan Z) untuk gerakan linier sepanjang tiga sumbu (maju dan mundur, atas dan bawah, dan sisi ke sisi). Ketiga sendi tersebut bersifat translasi, yang berarti gerakan sendi dibatasi pada garis lurus. Inilah sebabnya mengapa robot seperti itu juga disebut robot “linier”.
Robot kartesian dapat digunakan untuk pengambilan dan penempatan, penanganan material, otomatisasi pengemasan, penyimpanan dan pengambilan, pemotongan dan pengeboran, dan banyak lagi aplikasi lainnya.
Mereka kaku di ketiga dimensi, yang membuatnya sangat akurat dan dapat diulang. Mereka lebih sederhana daripada lengan robot yang diartikulasikan, dengan kontrol perangkat lunak yang lebih sederhana, dan bisa lebih murah, tergantung pada aplikasinya.
Robot Gantry - Jenis Robot Kartesius
Keuntungan: Tergantung pada modelnya, dapat mengangkat benda yang sangat berat. Dapat dibuat sangat besar, mencakup seluruh fasilitas, jika diinginkan. Bisa sangat hemat biaya untuk aplikasi yang tepat.
Kekurangan: Tidak dapat melakukan gerakan rotasi.

Robot kartesian atau linier dapat dikonfigurasi sebagai robot gantry. Robot Gantry bergerak di sepanjang jalur di atas kepala. Tergantung pada desainnya, robot gantry dapat menangani beban yang sangat berat dan memindahkannya dengan cepat dan tepat. Mereka juga dapat dibuat sangat besar, jika diperlukan, menutupi seluruh ruang lantai fasilitas. Robot gantry yang lebih kecil dapat berguna untuk pick-and-place dan operasi lain yang melibatkan akurasi tinggi dan kekakuan yang baik.
Karena aspek kontrol gerak robot linier relatif sederhana, seringkali biayanya lebih rendah daripada jenis robot lainnya dan dapat menjadi solusi yang sangat hemat biaya untuk banyak tugas otomatisasi.
Amplop kerja robot kartesius berbentuk persegi panjang. Menambahkan gerakan vertikal berarti amplop kerja berbentuk kotak.
robot SCARA
Keuntungan: Sangat baik untuk banyak aplikasi perakitan. Cepat dan akurat. Hemat biaya untuk operasi perakitan.
Kekurangan: Tidak sefleksibel lengan yang diartikulasikan. Tidak seakurat lengan Cartesian. Tidak secepat lengan robot Delta.
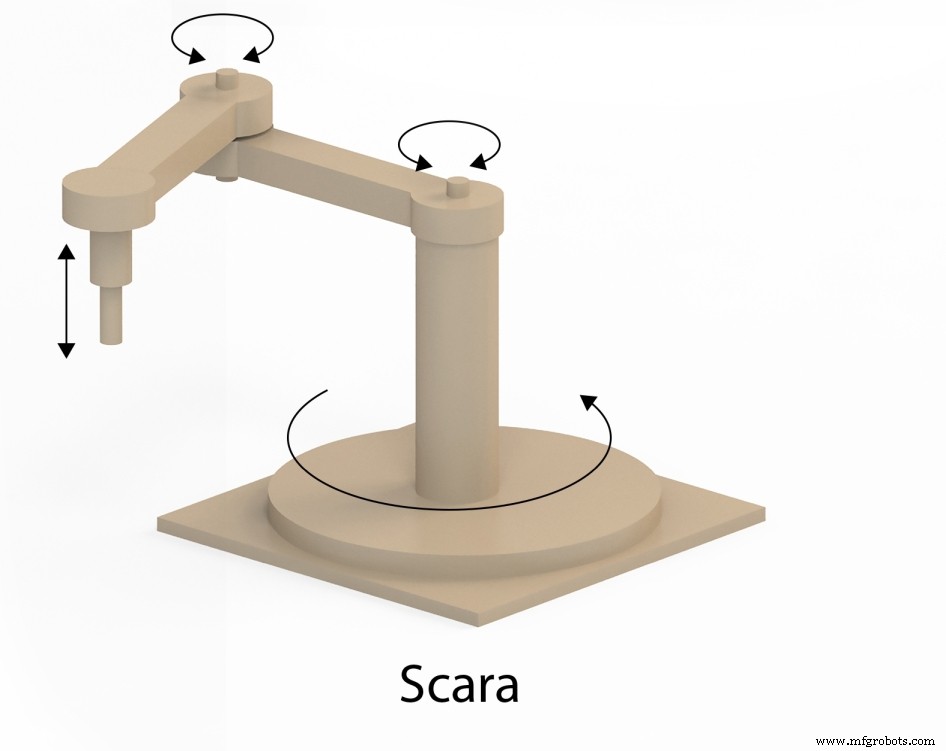
Robot SCARA (Lengan Robot Majelis Kepatuhan Selektif) mirip dengan robot Cartesian karena mereka bergerak dalam 3 sambungan atau sumbu. Namun, berbeda dengan robot Cartesian, dua sendi robot SCARA bersifat rotasi. Karena itu mereka mampu melakukan gerakan yang lebih kompleks daripada robot Cartesian. Mereka umumnya lebih cepat dan memiliki lebih banyak fleksibilitas dalam gerakan tetapi kurang tepat dibandingkan robot Cartesian.
Fakta Menarik: Meluasnya penggunaan robot SCARA merevolusi industri elektronik kecil. Karena tapaknya yang kecil, kesederhanaan, dan karakteristik desainnya, mereka secara unik sangat cocok untuk arena aplikasi ini dan telah terbukti sangat hemat biaya.
Seperti yang tersirat dalam "perakitan" namanya, lengan robot SCARA diciptakan untuk aplikasi perakitan. Robot SCARA diciptakan pada tahun 1981 oleh Hiroshi Makino di Universitas Yamanashi di Jepang. "Kepatuhan" dalam nama mengacu pada sejumlah "pemberian". Artinya, jika Anda mendorong robot SCARA di bidang horizontal, itu akan memberi sedikit - itu akan bergerak, itu tidak sepenuhnya kaku. Namun, di bidang vertikal, robot SCARA cukup kaku, dan tidak akan "memberi" jika Anda mendorongnya ke arah ini. Oleh karena itu, ia memiliki kepatuhan "selektif". Ini sesuai di bidang horizontal, dan tidak di bidang vertikal.
Kepatuhan selektif cukup berguna dalam operasi perakitan di mana bagian perlu dimasukkan ke dalam papan sirkuit, misalnya. Perakitan semacam ini sering membutuhkan bagian untuk dimasukkan ke dalam lubang. Memusatkan bagian ke dalam lubang sering kali membutuhkan sedikit "kepatuhan" untuk menemukan titik pusat - sedikit bergoyang, atau sedikit "memberi". Kemudian, gaya penyisipan, yang bergerak ke bawah, harus tegas dan kaku.
Robot SCARA kurang kaku dari robot Cartesian dan juga terbatas pada berat yang dapat mereka angkat, dibandingkan dengan robot Cartesian yang dapat mengangkat benda yang cukup berat. Robot SCARA memiliki footprint yang kecil dan umumnya digunakan untuk aplikasi yang jarak yang akan dipindahkan relatif kecil. Mereka memiliki derajat kebebasan yang lebih sedikit daripada lengan yang diartikulasikan. Di sisi lain, mereka memiliki tingkat akurasi yang tinggi dan cukup berulang. Dan mereka lebih murah daripada lengan yang diartikulasikan.
Amplop kerja robot SCARA berbentuk silinder, yang juga menjadi pertimbangan saat mempertimbangkan aplikasi. Robot SCARA umumnya lebih cepat daripada lengan yang diartikulasikan, meskipun tidak secepat robot Delta.
Robot Kutub atau Bulat
Keuntungan: Sistem kontrol yang lebih sederhana daripada lengan yang diartikulasikan. Dapat memiliki jangkauan yang panjang. Sangat baik untuk banyak aplikasi pengelasan. Mungkin lebih cepat dari lengan yang diartikulasikan.
Kekurangan: Tidak sefleksibel lengan robot yang diartikulasikan. Teknologi yang lebih tua. Seringkali membutuhkan tapak yang agak besar. Tidak secepat lengan Delta.
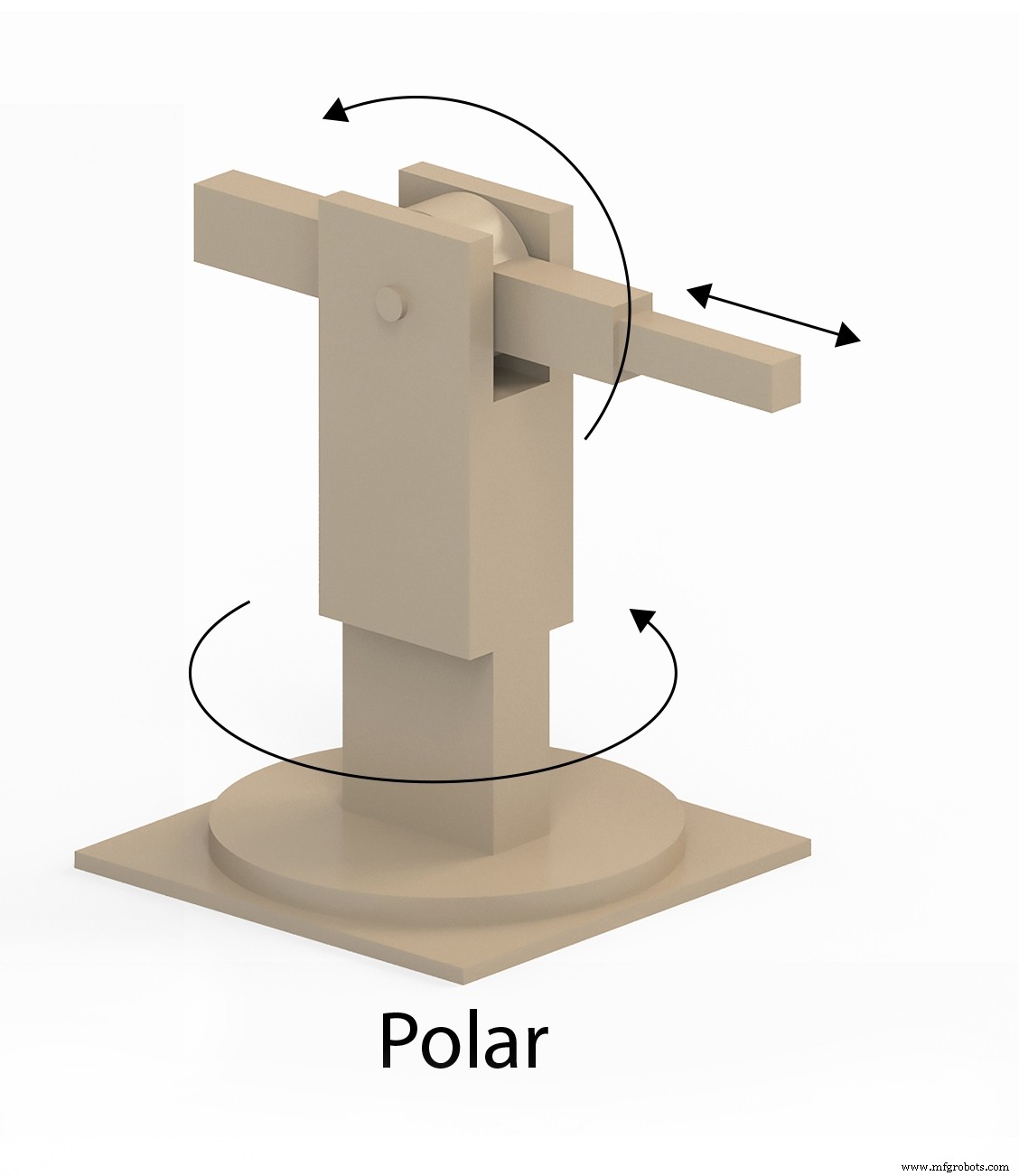
Robot kutub (terkadang disebut robot bola) memiliki kombinasi dua sambungan rotasi dan satu sambungan linier. Desain mereka menciptakan ruang kerja berbentuk bola.
Fakta menarik: Robot industri pertama (dibuat pada 1950-an), yang disebut "Unimate", adalah robot berbentuk bola.
Robot kutub dapat digunakan untuk pencetakan injeksi, pengecatan, pengelasan busur, dan pengelasan titik. Mereka dapat memiliki jangkauan yang panjang jika dilengkapi dengan lengan linier berukuran sesuai.
Robot kutub adalah teknologi yang lebih tua dan dapat diganti dengan robot lengan yang diartikulasikan (yang juga memiliki amplop kerja berbentuk bola), meskipun dalam beberapa aplikasi robot kutub mungkin masih lebih hemat biaya daripada alternatifnya.
Robot delta
Keuntungan: Desain lengan robot tercepat untuk operasi pengambilan dan penempatan. Ringan. Tepat.
Kekurangan: Terbatas pada benda yang relatif kecil dan ringan. Tidak cocok untuk mengerjakan objek dalam bidang vertikal. Jangkauan terbatas.
Robot delta (juga disebut robot paralel) memiliki tiga lengan robot berbentuk jajaran genjang. Biasanya, robot delta terletak di atas benda kerja, melekat pada trestle di atas kepala. Karena semua motor berada di pangkalan, sambungan dan lengan robot sangat ringan dibandingkan dengan robot lain. Robot Delta memiliki amplop kerja berbentuk kubah terbalik.
Fakta Menarik: Robot Delta awalnya dirancang untuk memungkinkan produsen cokelat mengambil potongan cokelat dan memasukkannya ke dalam kotak.

Desain robot Delta menghasilkan operasi berkecepatan tinggi dan presisi. Robot delta terutama digunakan dalam aplikasi pick and place. Aplikasi tambahan termasuk pengeluaran perekat, penyolderan, dan perakitan. Robot Delta tidak dapat membawa muatan berat dan itu membatasi jenis End of Arm Tooling (EoAT) dan tugas yang dapat mereka tangani.
Desain hibrida robot Delta terkadang menempatkan sambungan yang berputar di ujung lengan untuk meningkatkan fleksibilitas gerakannya.
Robot silinder
Keuntungan: Kaku. Tepat. Sempurna dalam aplikasi yang membutuhkan geometri melingkar.
Kekurangan: Teknologi yang lebih tua. Fleksibilitas gerakan terbatas.
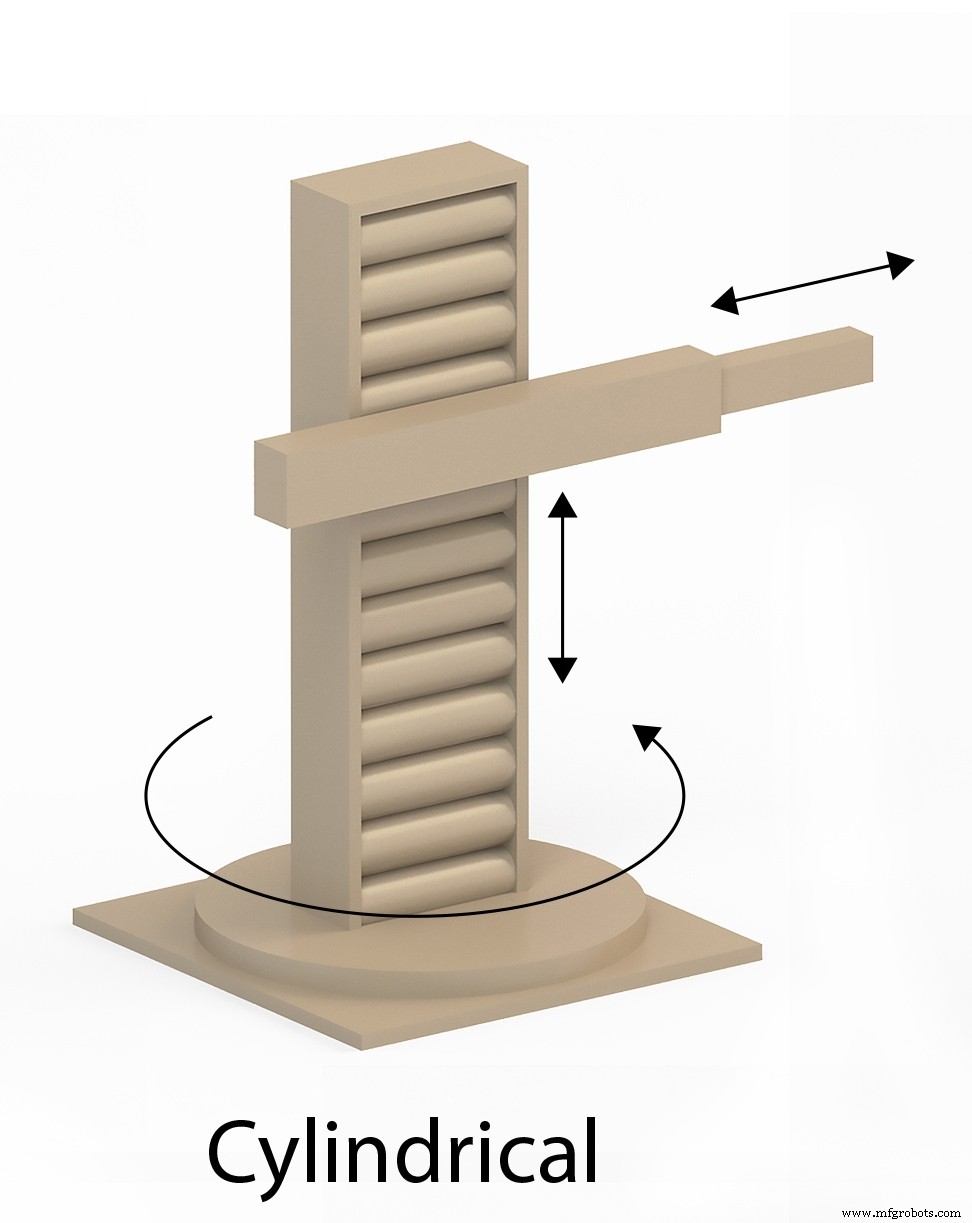
Robot silinder memiliki setidaknya satu sambungan berputar di alas dan dua sambungan linier. Desain ini mengarah pada ruang kerja berbentuk silinder.
Robot silinder biasanya digunakan di ruang kerja yang sempit dan sangat cocok untuk objek yang perlu memiliki simetri melingkar (misalnya kabel, pipa). Aplikasi penggilingan, perakitan, dan pengelasan titik menggunakan robot silindris.
Robot kolaboratif (cobot)
Keuntungan: Aman untuk bekerja bersama orang. Antarmuka modern memungkinkan "mengajarkan" lengan robot apa yang harus dilakukan tanpa menulis kode.
Kekurangan: Tidak selalu jenis lengan robot tercepat. Terbatas dalam kekuatan dan kecepatan.
Robot kolaboratif (cobot) memungkinkan interaksi manusia-robot di lingkungan kerja yang aman, tanpa perlu pagar atau tindakan keselamatan lain yang dilakukan dalam aplikasi robot industri tradisional. Namun, langkah-langkah keamanan menyebabkan penurunan kecepatan operasi.

Selain aman untuk dioperasikan bersama manusia, salah satu fitur yang membuat cobot lebih kolaboratif adalah kemampuan operator untuk mengajarkan gerakan lengan robot tanpa harus menulis kode pemrograman. Operator memegang lengan robot dan secara fisik menggerakkannya ke arah yang dibutuhkan robot. Lengan robot kemudian dapat meniru gerakan yang ditunjukkan.
Cobot standar biasanya tidak dirancang untuk menangani benda yang sangat berat. Ini menciptakan batasan pada berbagai produk yang dapat dikelolanya.
Robot kolaboratif memiliki berbagai aplikasi seperti perawatan mesin, pick and place, perakitan, pengelasan busur, tetapi umumnya tidak cocok untuk aplikasi tugas berat atau tugas berkecepatan sangat tinggi.
Robot Seluler Otonom

AMR atau Autonomous Mobile Robots mewakili segmen pasar robot industri yang berkembang pesat. Mereka datang dalam berbagai bentuk dan ukuran, dioptimalkan untuk tugas yang dirancang untuk mereka lakukan.
Kereta Beroda
AMR berupa gerobak atau kendaraan beroda biasanya digunakan untuk mengangkut barang di dalam fasilitas pabrik atau gudang. Mereka dilengkapi dengan sensor, daya komputasi onboard, dan motor listrik yang memungkinkan mereka untuk bergerak di sekitar fasilitas dan membuat peta internalnya. Ini sering dilakukan dengan seseorang yang mengikuti AMR berkeliling, membimbingnya dengan remote control.
Setelah peta internal dibuat, AMR kemudian dapat diinstruksikan ke tujuan yang perlu ditempuh. Fitur utama AMR adalah mereka dapat secara mandiri (“otonom”) melakukan perjalanan dari satu tempat ke tempat lain, menghindari rintangan di sepanjang jalan. Jika seseorang, forklift, atau benda lain menghalangi jalan mereka, mereka dapat membelok untuk menghindari rintangan atau bahkan merencanakan rute yang sama sekali baru ke tujuan mereka.
Kemampuan otonom AMR membuatnya sangat fleksibel dibandingkan dengan sistem konveyor.
AMR dalam bentuk gerobak beroda dapat digunakan secara individual untuk mengangkut barang, dan juga dapat digunakan sebagai bagian dari gerombolan, atau armada robot. Armada AMR digunakan oleh Amazon, misalnya. Amazon menggunakan apa yang disebut konfigurasi "barang ke orang", di mana setiap robot mengambil seluruh rak produk dan membawanya ke seseorang di stasiun pengambilan pesanan. Orang tersebut kemudian mengambil produk dari rak dan menempatkannya dalam wadah untuk pemenuhan pesanan e-commerce.
Baru-baru ini, kemajuan dalam visi komputer, kecerdasan buatan, dan teknologi gripper telah memungkinkan untuk menggantikan orang di stasiun pengambilan dengan lengan robot yang diartikulasikan. Dalam hal ini, AMR gerobak beroda membawa barang ke lengan robot, untuk kolaborasi robot-ke-robot.
Kendaraan yang Dipandu Secara Otonom (AGV)
AGV biasanya berbentuk kendaraan beroda, dan merupakan teknologi yang lebih tua dari AMR. Mereka memiliki kecerdasan yang lebih sedikit dan akibatnya tidak otonom seperti AMR. AGV tidak memiliki kemampuan untuk membuat peta fasilitas. Sebaliknya, mereka mengandalkan jalan yang ditetapkan untuk mereka. Jalur ditentukan oleh kabel yang ditempatkan di lantai, atau pita khusus, atau jenis pemandu lainnya. Jika AGV menemui hambatan di jalurnya, ia hanya bisa berhenti dan meminta bantuan.
Namun, perbedaan antara AGV dan AMR menjadi semakin kabur. AGV diberi lebih banyak daya komputasi onboard, dan beberapa sekarang memiliki kemampuan untuk melewati rintangan di jalurnya.
AMR dengan Lengan Robot
Lengan robot dapat dipasang di atas AMR gerobak beroda. Hal ini meningkatkan fleksibilitas robot dan berbagai tugas yang dapat dilakukan. Salah satu aplikasinya adalah menggunakan robot semacam itu untuk merawat seluruh deretan peralatan mesin. Robot dapat membongkar bagian yang sudah jadi dan memuat benda kerja kosong baru ke dalam satu mesin, lalu bergerak ke bawah baris dan mengulangi operasi untuk serangkaian mesin.
Robot Berkaki
Jutaan orang telah melihat video YouTube tentang robot menari yang dibuat oleh Boston Dynamics dan karenanya telah melihat robot berkaki dua dan empat. Salah satu penggunaan industri untuk robot dengan kaki membayangkan penerapannya untuk pengiriman paket. Kasus penggunaan lainnya adalah untuk operasi pencarian dan penyelamatan.
Menggunakan kaki sebagai pengganti roda memiliki keuntungan tertentu. Kaki memungkinkan robot untuk melakukan perjalanan melalui beberapa jenis medan yang sulit atau tidak mungkin bagi gerobak dengan roda. Kaki memungkinkan menaiki tangga, dan masuk dan keluar kendaraan lebih mudah daripada yang bisa dilakukan kereta beroda.
AMR Bulat
Robot Seluler Otonom dalam bentuk bola tersedia secara komersial dan memiliki keunggulan khusus dibandingkan faktor bentuk lainnya. Komponen sistem AMR bulat disegel di dalam cangkang yang tahan lama. Hal ini membuat mereka mampu beroperasi di lingkungan yang keras. Mereka juga bisa mengapung dan melakukan perjalanan di atas air. AMR berbentuk bola dapat bersifat amfibi, berjalan baik di atas air maupun di darat.
Sistem propulsi AMR bola paling sering didasarkan pada pergeseran pusat gravitasi.
Aplikasi industri untuk AMR sferis terutama dalam pengawasan dan inspeksi jarak jauh. Dilengkapi dengan kamera dan komunikasi, mereka dapat mengirimkan video kembali ke operator jarak jauh. Untuk lingkungan yang tidak bersahabat yang mungkin memiliki gas beracun atau kondisi berbahaya lainnya, AMR berbentuk bola mungkin ideal.
Robot Terbang (Drone Udara)
Unmanned Aerial Vehicle (UAV) atau drone semakin banyak digunakan untuk berbagai keperluan industri. Salah satu aplikasinya adalah menggunakan drone di gudang untuk melakukan inventarisasi. Drone dapat terbang melalui lorong-lorong gudang dan menggunakan visi komputer untuk menghitung jumlah item dalam kotak di rak.

Tergantung pada desainnya, drone industri dapat menjadi semacam Autonomous Mobile Robot (AMR), karena beberapa model dapat secara otomatis mendeteksi rintangan dan menghindarinya, dan secara mandiri menavigasi jalan mereka ke tujuan. Beberapa drone industri dapat diberi "misi", yang mungkin terdiri dari terbang di atas operasi penambangan strip, atau proyek infrastruktur. Drone menerbangkan misinya secara mandiri dan dapat merekam video proyek, atau melakukan pengukuran tertentu dan merekamnya. Drone semacam itu dapat digunakan untuk memantau kemajuan proyek konstruksi.
Amazon dan perusahaan lain sudah menggunakan drone secara terbatas untuk pengiriman barang tahan lama dan bahan makanan.
Robot Bawah Air

Ada berbagai macam robot yang dirancang untuk digunakan di bawah air. Beberapa robot bawah air dirancang untuk menjadi otonom (Autonomous Underwater Vehicles - UAV), dan beberapa dibuat untuk dikendalikan dari jarak jauh, baik secara nirkabel atau dengan tambatan kabel. Beberapa robot bawah air menggunakan baling-baling sebagai sistem penggeraknya, mirip dengan kapal selam. Di sisi lain, banyak robot seperti itu meniru tindakan makhluk hidup untuk penggeraknya. Beberapa meniru aksi lumba-lumba, yang lain meniru ular, dan yang lain lagi bergerak seperti ikan. Meniru alam dengan cara ini disebut “biomimikri” karena aksi robot meniru makhluk biologis.
Robot bawah air dapat digunakan untuk inspeksi anjungan minyak lepas pantai, jaringan pipa, dan untuk penelitian ilmiah. Aplikasi lain melibatkan penggunaan robot bawah air untuk memeriksa bagian bawah jembatan, memeriksa intake bendungan pembangkit listrik tenaga air, dan memeriksa terumbu karang.
Robot bawah air sedang digunakan oleh departemen kepolisian untuk mengambil rekaman video dari dasar badan air untuk mencari bukti. Militer juga tertarik dengan robot bawah air. Bisakah sistem sonar membedakan antara "lumba-lumba" robot dan yang asli?
Keuntungan robot bawah air banyak. Robot semacam itu berarti tidak perlu menanggung risiko dan biaya penyelam manusia. Robot dapat bertahan di dalam air lebih lama daripada manusia. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
How to source the ideal robot type for your organization
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process. Klik di sini untuk menyiapkan konsultasi dengan penasihat ahli.


