Kendaraan otonom dibangun di atas teknologi sensor yang lebih baik
Kemampuan sensor saat ini, meskipun membantu, relatif belum sempurna ketika datang ke kendaraan otonom.
Kami masih memiliki jalan panjang untuk mencapai jalan raya yang dipenuhi dengan kendaraan self-driving. Kemampuan sensor saat ini, meskipun membantu, relatif belum sempurna dalam hal kendaraan otonom.
Konon, industri otomotif telah berkembang secara dramatis dalam beberapa tahun terakhir. Jika Anda meluncurkannya dengan kendaraan baru lima atau enam tahun yang lalu, kemungkinan akan berisi sekitar 60 hingga 100 sensor . Hari ini, jumlah itu jauh lebih dekat dengan 200 atau lebih. Karena kendaraan terus menjadi lebih pintar dan lebih otonom, evolusi dan kecanggihan sensor terus berjalan dan akan terus berkembang seiring dengan semakin banyaknya fitur baru.
Untuk mendorong kemajuan dalam kendaraan otonom, penyedia teknologi dan pembuat mobil mempertimbangkan tantangan seperti degradasi sensor, kolaborasi dalam standar industri, dan pemeliharaan/servis pertahanan keamanan siber perangkat lunak selama masa pakai kendaraan.
Perlombaan Tikus Otomotif
Salah satu tantangan terbesar yang dimiliki produsen mobil dan OEM adalah mengikuti perkembangan pesat sensor dan data. Sensor perlu menyediakan tingkat fidelitas data yang diperlukan untuk sistem kendaraan guna memenuhi persyaratan desain.
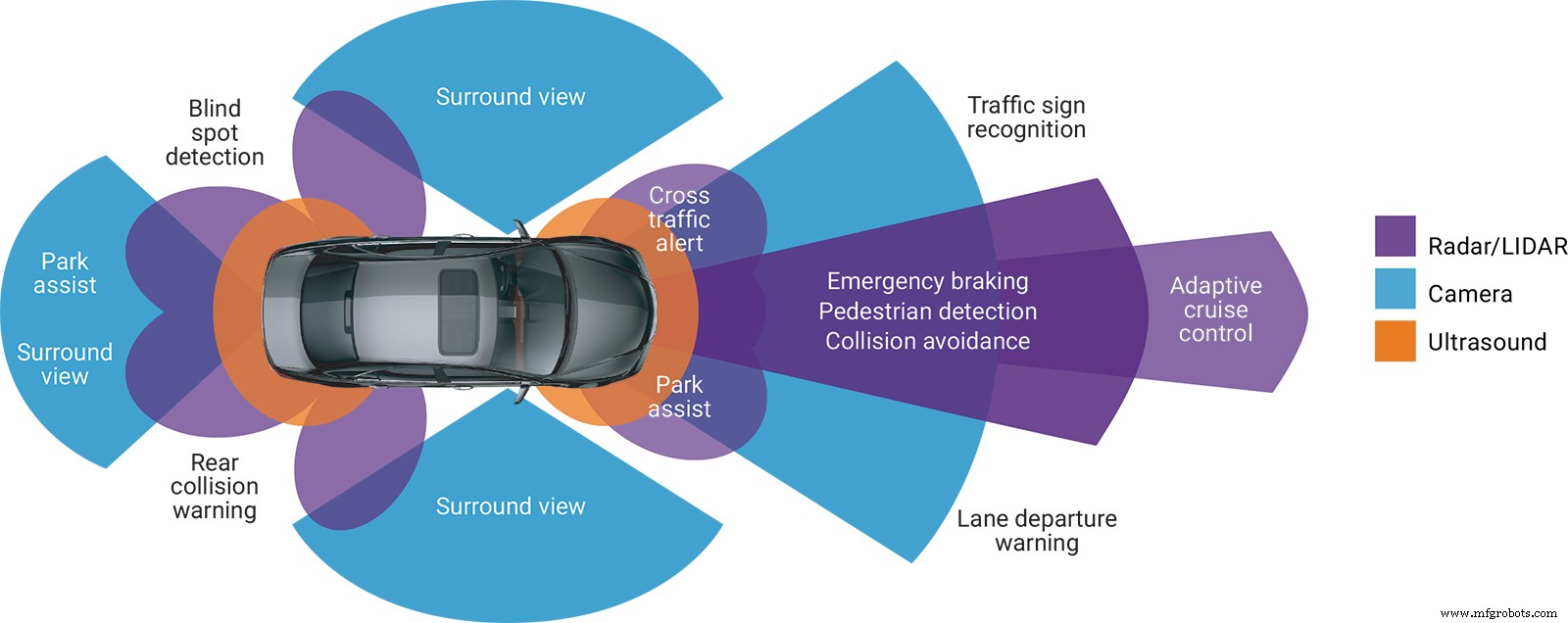
klik untuk gambar ukuran penuh Sensor yang berbeda memiliki kekuatan dan kelemahan yang berbeda. Salah satu pendekatannya adalah menggabungkan campuran sensor untuk mencapai penginderaan lingkungan yang lebih menyeluruh
Mengemudi di daerah metropolitan yang padat dengan sejumlah besar pengemudi, pejalan kaki, pengendara sepeda, dan sepeda motor di jalan membutuhkan kendaraan untuk membuat keputusan sepersekian detik untuk berhenti atau berbelok untuk menghindari menabrak pejalan kaki atau kendaraan lain. Akibatnya, kami mulai melihat perpaduan sensor yang berperan, membuat keputusan yang mungkin tidak dapat dilakukan oleh pengemudi manusia pada saat sistem bantuan pengemudi (ADAS) yang canggih bereaksi dengan menggunakan dan menafsirkan berbagai input data.
Juga penting bahwa selama tahap awal pembuatan sensor, pembuat mobil mematuhi standar keselamatan fungsional otomotif untuk mencegah kegagalan chip atau perangkat lunak. ISO 26262 adalah standar otomotif yang mengamanatkan proses pengembangan yang harus diikuti oleh OEM dan pemasok otomotif dan didokumentasikan agar perangkat mereka dianggap aman secara fungsional. Melalui kepatuhan terhadap ISO 26262, OEM otomotif dan pemasok memberikan jaminan bahwa perangkat mereka akan berfungsi sebagaimana mestinya, bila dimaksudkan.
Tantangan Degradasi Sensor
Aspek lain dari lanskap sensor yang selalu berubah adalah degradasi sensor. Degradasi sensor adalah bagian alami dari persamaan kendaraan otonom, terutama mengingat fakta bahwa kendaraan saat ini biasanya memiliki umur 10 hingga 15 tahun. Penyebab utama degradasi termasuk keausan umum sensor, lingkungan pengoperasian yang keras, dan degradasi elemen sistem elektronik lainnya.
Pembuat mobil dan penyedia teknologi perlu mempertimbangkan kemampuan sensor yang dipasang untuk fungsi seperti LiDAR, kamera, ultrasound, dll., untuk bekerja pada tingkat yang sama, jika tidak lebih besar, daripada yang mereka lakukan saat kendaraan baru untuk keseluruhan yang diharapkan. umur kendaraan. Mereka juga harus menjawab apa yang terjadi jika sensor mulai gagal (yaitu, bagaimana memperingatkan pengemudi, membangun fitur keselamatan, dll.). Untuk memerangi degradasi, OEM perlu memodelkan dan merancang semikonduktor dan komponen lain di dalam kendaraan untuk menciptakan tingkat kegagalan prediktif dan alternatif dalam banyak lingkungan yang berbeda.
Masalah Keamanan Siber
Ada beberapa faktor berbeda yang perlu dipertimbangkan saat memastikan sensor kendaraan otonom aman. Meretas ke kendaraan otonom selalu menjadi perhatian dan harus ditangani, tetapi faktor keamanan lain yang kurang jelas adalah penyerang yang memengaruhi teknologi pembelajaran mesin yang disematkan di kendaraan untuk bereaksi dengan cara yang jahat.
Misalnya, sebuah penelitian di Inggris memperkenalkan papan iklan video yang telah diubah untuk menunjukkan tanda berhenti hanya dalam sepersekian detik. Kendaraan otonom akan merasakan tanda berhenti dan berhenti karena mereka dapat menangkap gambar itu, bereaksi dengan cara yang sama seperti jika mereka merasakan tanda berhenti di jalan raya. Namun, pengemudi manusia tidak akan dapat bereaksi terhadap gambar tersebut, sehingga berpotensi menimbulkan bahaya jika kendaraan otonom di depan mereka berhenti tiba-tiba tanpa peringatan atau alasan yang jelas. Potensi "objek hantu" ini untuk membahayakan pengemudi dan pejalan kaki hanyalah satu lagi tantangan yang dihadapi pembuat mobil dalam menjaga keamanan kendaraan otonom.
Untuk membentengi kerentanan sensor, NHTSA merekomendasikan agar industri otomotif mengikuti Kerangka Kerja Keamanan Siber yang didokumentasikan Institut Nasional Standar dan Teknologi (NIST). Kerangka kerja ini menyarankan pendekatan berlapis untuk keamanan siber yang terstruktur di sekitar fungsi utama ini:mengidentifikasi, melindungi, mendeteksi, merespons, dan memulihkan.
Perancang sistem harus menjaga operasi sistem sambil mencapai keseimbangan yang tepat dalam hal peringatan yang dibagikan kepada pengemudi. Pertimbangkan ADAS, yang dirancang untuk memperingatkan pengemudi akan bahaya yang akan datang di jalan serta potensi kegagalan sistem. Biasanya, kesalahan sistem karena pelanggaran keamanan memicu penarikan kembali yang memerlukan perjalanan ke dealer dan, bagi produsen kendaraan, perbaikan yang berpotensi mahal. Pendekatan yang lebih baik adalah dengan membangun keamanan untuk mencegah tindakan jahat yang menyebabkan kesalahan sejak awal.
Seiring dengan meningkatnya kompleksitas dan kemampuan perangkat ini, jalan yang berbeda di mana serangan keamanan siber terjadi juga akan tumbuh secara proporsional. Desainer dan pembuat mobil perlu memperbarui pertahanan mereka dan mengelola jenis reaksi yang tidak diinginkan ini untuk melindungi dari serangan siber nontradisional ini. Bagian dari pertahanan itu harus menjadi program manajemen siklus hidup perangkat lunak yang kuat yang memungkinkan organisasi untuk menerapkan pelajaran dari pengalaman mereka. Filosofi yang sama berlaku untuk kinerja fisik sensor itu sendiri untuk memerangi degradasi.
Ketika kendaraan otonom menjadi lebih umum, akan ada peraturan tambahan yang ikut bermain serta berbagai kebiasaan konsumen yang akan membantu membentuk masa depan pasar. Mengikuti kemajuan dalam ruang fusi sensor itu menantang, tetapi perlu, karena kami terus melihat kendaraan otonom melaju ke arus utama.
— Chris Clark adalah manajer senior Grup Otomotif di Synopsys.
>> Artikel ini awalnya diterbitkan pada situs saudara kami, EE Times.
Konten Terkait:
Pakar ADAS mempertimbangkan integrasi sensor di kendaraan masa depan
Pembelajaran mesin dapat mengurangi degradasi sensor
Memahami kompleksitas AV
Sensor tertanam adalah kunci pertumbuhan mobilitas cerdas
Cara sensor pintar menyempurnakan desain ADAS
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tertanam.