

Teknologi Industri

Manufaktur industri
Umpan balik adalah prinsip rekayasa yang menarik. Itu dapat mengubah perangkat atau proses yang agak sederhana menjadi sesuatu yang jauh lebih kompleks. Kami telah melihat efek umpan balik yang sengaja diintegrasikan ke dalam desain sirkuit dengan beberapa efek yang cukup mengejutkan:
Di bidang instrumentasi proses, umpan balik digunakan untuk mengubah sistem pengukuran sederhana menjadi sesuatu yang mampu dikendalikan:
Umpan balik, baik positif maupun negatif, memiliki kecenderungan untuk menambahkan dinamika baru pada pengoperasian perangkat atau sistem. Terkadang, dinamika baru ini menemukan aplikasi yang berguna, sementara di lain waktu mereka hanya menarik.
Dengan tabel pencarian yang diprogram ke dalam perangkat memori, umpan balik dari output data kembali ke input alamat menciptakan jenis perangkat yang sama sekali baru:Finite State Machine , atau FSM :
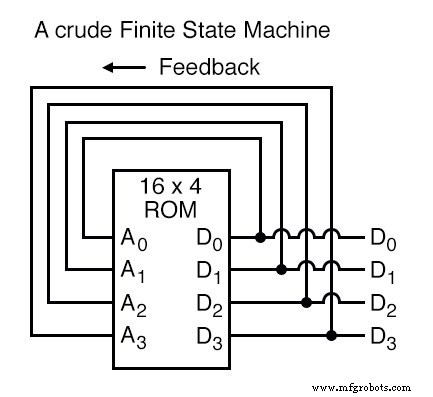
Rangkaian di atas mengilustrasikan ide dasarnya:data yang disimpan di setiap alamat menjadi lokasi penyimpanan berikutnya yang dituju oleh ROM. Hasilnya adalah urutan angka biner tertentu (mengikuti urutan yang diprogram ke dalam ROM) pada output, dari waktu ke waktu.
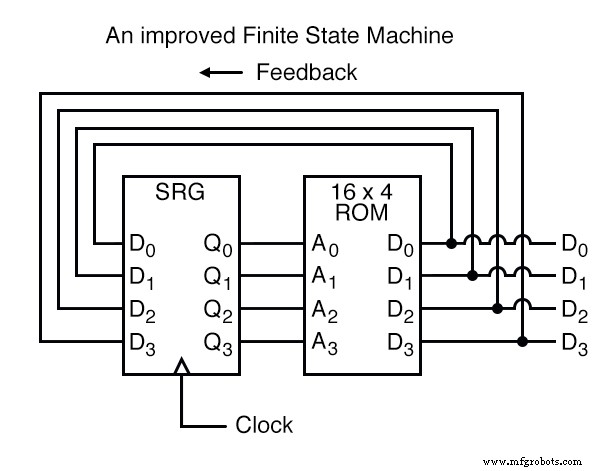
Untuk menghindari masalah pengaturan waktu sinyal, kita perlu menghubungkan output data kembali ke input alamat melalui flip-flop tipe-D 4-bit, sehingga urutannya terjadi selangkah demi selangkah dengan ketukan pulsa clock terkontrol:
Analogi untuk cara kerja perangkat semacam itu mungkin berupa susunan kotak kantor pos, masing-masing dengan nomor pengenal di pintu (alamat), dan masing-masing berisi selembar kertas dengan alamat P.O. kotak tertulis di atasnya (data). Seseorang, membuka P.O. kotak, akan menemukan di dalamnya alamat P.O. kotak untuk dibuka.
Dengan menyimpan pola alamat tertentu di P.O. kotak, kita dapat menentukan urutan di mana setiap kotak dibuka, dan oleh karena itu urutan kertas mana yang akan dibaca.
Memiliki 16 lokasi memori yang dapat dialamatkan di ROM, Mesin Status Terbatas ini akan memiliki 16 "status" stabil yang berbeda di mana ia dapat mengunci. Di masing-masing status tersebut, identitas status berikutnya akan diprogram ke dalam ROM, menunggu sinyal dari pulsa clock berikutnya untuk diumpankan kembali ke ROM sebagai alamat.
Salah satu aplikasi yang berguna dari FSM semacam itu adalah untuk menghasilkan urutan hitungan arbitrer, seperti Kode Abu-abu:
Alamat -----> Urutan penghitungan Kode Abu-abu Data:0000 -------> 0001 0 0000 0001 -------> 0011 1 0001 0010 -------> 0110 2 0011 0011 -------> 0010 3 0010 0100 -------> 1100 4 0110 0101 -------> 0100 5 0111 0110 -------> 0111 6 0101 0111 -------> 0101 7 0100 1000 -------> 0000 8 1100 1001 -------> 1000 9 1101 1010 -------> 1011 10 1111 1011 -------> 1001 11 1110 1100 -------> 1101 12 1010 1101 -------> 1111 13 1011 1110 -------> 1010 14 1001 1111 -------> 1110 15 1000
Coba ikuti urutan penghitungan Kode Abu-abu seperti yang dilakukan FSM:mulai dari 0000, ikuti data yang disimpan di alamat tersebut (0001) ke alamat berikutnya, dan seterusnya (0011), dan seterusnya (0010), dan seterusnya pada (0110), dll. Hasilnya, untuk tabel program yang ditampilkan, adalah urutan pengalamatan melompat-lompat dari alamat ke alamat dengan cara yang tampak serampangan, tetapi ketika Anda memeriksa setiap alamat yang diakses, Anda akan menemukan bahwa mengikuti urutan yang benar untuk kode Gray 4-bit.
Ketika FSM tiba pada keadaan terprogram terakhirnya (alamat 1000), data yang disimpan di sana adalah 0000, yang memulai seluruh urutan lagi di alamat 0000 dalam langkah dengan pulsa clock berikutnya.
Kita dapat memperluas kemampuan rangkaian di atas dengan menggunakan ROM dengan lebih banyak baris alamat, dan menambahkan lebih banyak data pemrograman:
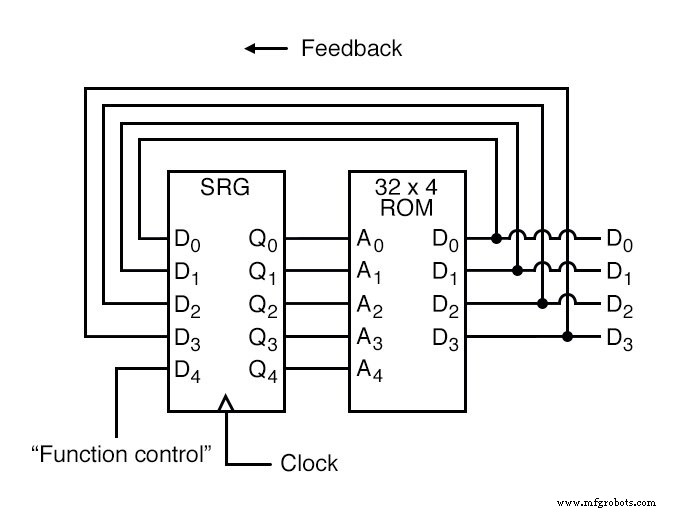
Sekarang, seperti rangkaian penambah tabel pencarian yang kami ubah menjadi Unit Logika Aritmatika (+, -, x, / fungsi) dengan memanfaatkan lebih banyak baris alamat sebagai input "kontrol fungsi", penghitung FSM ini dapat digunakan untuk menghasilkan lebih banyak dari satu urutan hitungan, urutan yang berbeda diprogram untuk empat bit umpan balik (A0 hingga A3) untuk masing-masing dari dua kombinasi input jalur kontrol fungsi (A4 =0 atau 1).
Alamat -----> Alamat Data -----> Data 00000 -------> 0001 10000 -------> 0001 00001 -------> 0010 10001 -------> 0011 00010 -------> 0011 10010 -------> 0110 00011 -------> 0100 10011 -------> 0010 00100 -------> 0101 10100 -------> 1100 00101 -------> 0110 10101 -------> 0100 00110 -------> 0111 10110 -------> 0111 00111 -------> 1000 10111 -------> 0101 01000 -------> 1001 11000 -------> 0000 01001 -------> 1010 11001 -------> 1000 01010 -------> 1011 11010 -------> 1011 01011 -------> 1100 11011 -------> 1001 01100 -------> 1101 11100 -------> 1101 01101 -------> 1110 11101 -------> 1111 01110 -------> 1111 11110 -------> 1010 01111 -------> 0000 11111 -------> 1110
Jika A4 adalah 0, FSM menghitung dalam biner; jika A4 adalah 1, FSM dihitung dalam Kode Abu-abu. Dalam kedua kasus, urutan penghitungan adalah arbitrer:ditentukan oleh keinginan programmer. Dalam hal ini, urutan penghitungan bahkan tidak harus memiliki 16 langkah, karena programmer dapat memutuskan untuk mendaur ulang urutan ke 0000 di salah satu langkah sama sekali. Ini adalah perangkat penghitung yang sepenuhnya fleksibel, perilakunya ditentukan secara ketat oleh perangkat lunak (pemrograman) di ROM.
Kami dapat memperluas kemampuan FSM lebih jauh lagi dengan memanfaatkan chip ROM dengan jalur input alamat dan output data tambahan. Ambil rangkaian berikut, misalnya:
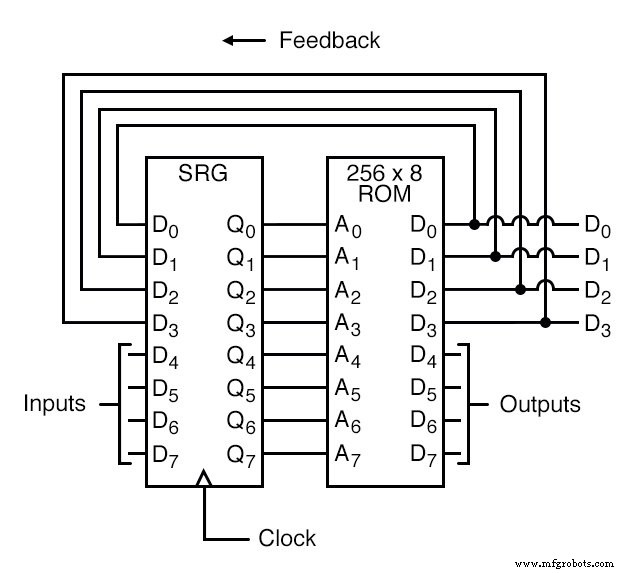
Di sini, output data D0 hingga D3 digunakan secara eksklusif untuk umpan balik ke jalur alamat A0 hingga A3. Jalur keluaran tanggal D4 hingga D7 dapat diprogram untuk mengeluarkan sesuatu selain nilai "keadaan" FSM. Karena empat bit keluaran data diumpankan kembali ke empat bit alamat, ini masih merupakan perangkat 16-status.
Namun, memiliki data keluaran yang berasal dari jalur keluaran data lain memberi programmer lebih banyak kebebasan untuk mengonfigurasi fungsi daripada sebelumnya. Dengan kata lain, perangkat ini dapat melakukan lebih dari sekadar menghitung! Output terprogram dari FSM ini tidak hanya bergantung pada status saluran alamat umpan balik (A0 hingga A3), tetapi juga status jalur input (A4 hingga A7).
Input sinyal clock flip/flop tipe-D juga tidak harus berasal dari generator pulsa. Untuk membuat segalanya lebih menarik, flip/flop dapat disambungkan ke clock pada beberapa peristiwa eksternal, sehingga FSM beralih ke status berikutnya hanya ketika sinyal input memerintahkannya.
Sekarang kami memiliki perangkat yang lebih memenuhi arti kata "dapat diprogram." Data yang ditulis ke ROM adalah sebuah program dalam arti yang sebenarnya:output mengikuti urutan yang telah ditentukan sebelumnya berdasarkan input ke perangkat dan "langkah" perangkat mana dalam urutannya.
Ini sangat mirip dengan desain pengoperasian Mesin Turing , perangkat komputasi teoretis yang ditemukan oleh Alan Turing, terbukti secara matematis mampu memecahkan masalah aritmatika apa pun yang diketahui, dengan kapasitas memori yang cukup.
Teknologi Industri
Pemesinan CNC adalah proses manufaktur tradisional yang menggunakan alat pemotong dan bor untuk menghilangkan material secara sistematis dari benda kerja untuk membuat bagian jadi. Mesin menerima jalur pahat untuk memotong potongan, biasanya dalam kode G. Kode untuk mesin dapat ditulis secara manual
Unit 1:Mesin Bubut TUJUAN Setelah menyelesaikan unit ini, Anda seharusnya dapat: • Mengidentifikasi bagian terpenting dari Mesin Bubut dan fungsinya. • Memahami aturan keselamatan Bubut. • Jelaskan penyiapan alat pemotong untuk pemesinan. • Jelaskan pemasangan benda kerja di mesin bubut. • Jel
TUJUAN Setelah menyelesaikan unit ini, Anda seharusnya dapat: Identifikasi Bandsaw. Pahami aturan keselamatan. Jelaskan pengoperasian Bandsaw Horizontal. Jelaskan pengoperasian Bandsaw Vertikal. Deskripsikan Chop Saw. Menjelaskan pemilihan mata gergaji. Deskripsikan perangkat gigi. J
Sekarang semua orang telah mendengar tentang Machine Learning dan bagaimana hal itu akan mengubah segalanya. Tetapi sangat sedikit yang memiliki ide bagaimana memulai untuk mengubah segalanya. Saya harap ketika Anda mencoba langkah-langkah di blog ini, atau bahkan membacanya, akan membantu Anda mema