Kontrol Robot secara nirkabel melalui perintah Bluetooth Laporan tesis | Proyek DIY
Robot didefinisikan sebagai desain mekanis yang mampu melakukan tugas-tugas manusia atau berperilaku seperti manusia. Membangun robot membutuhkan keahlian dan pemrograman yang kompleks. Ini tentang membangun sistem dan menyatukan motor, sensor sonar, dan kabel, di antara komponen penting lainnya | Tugas Akhir Tahun untuk Mahasiswa Elektronika dan Komunikasi | Teknik Elektro.
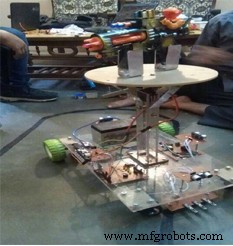
Makalah ini membahas desain dan konstruksi robot yang mampu mendeteksi musuh.
robot ini mengimplementasikan konsep berikut:penginderaan lingkungan, kontrol motor proporsional. Robot ini memproses informasi dari berbagai sensor dan elemen perangkat keras utama melalui mikrokontroler (Arduino mega). Ini menggunakan sensor sonar untuk mendeteksi kecelakaan kebakaran. Robot yang mampu mendeteksi musuh dan menembaknya. Sensor sonar akan digunakan untuk deteksi awal. Setelah musuh terdeteksi, robot akan secara otomatis menyalakan buzzer dalam hitungan detik, robot aktif dan mulai menembak ke arah musuh. Proyek ini membantu membangkitkan minat serta inovasi di bidang robotika sambil bekerja menuju solusi praktis dan dapat diperoleh untuk menyelamatkan nyawa dan mengurangi risiko kerusakan properti.
1.1 Ringkasan
Proyek ini terdiri dari hierarki robot yang dikendalikan secara nirkabel karena dikendalikan melalui perintah perangkat Bluetooth yang mengontrol pergerakan robot. Robot ini benar-benar jauh dan memberikan tampilan penuh dari area yang akan dikendalikan.
1.2 Sasaran dan Sasaran:
Tujuan utama dari proyek ini adalah untuk memberikan keamanan ke daerah yang tidak dapat dikendalikan oleh angkatan bersenjata. Oleh karena itu robot ini dapat memasuki tempat-tempat tersebut karena ukurannya dan kemudahan pengendaliannya.
Tujuan: • Menyediakan aplikasi pemantauan dan pengendalian jarak jauh untuk analisis. • Memungkinkan pengguna untuk memanipulasi musuh menggunakan lengan robot. • Untuk memberikan umpan balik visual untuk tempat di bawah keamanan. • Untuk menyediakan aplikasi kontrol yang sangat user-friendly.
1.3 Pernyataan cakupan sistem :Robot menggunakan aplikasi kontrol, di sisi pengguna untuk mengontrol robot dari jarak jauh menggunakan teknologi Wireless. Masukan dari pengguna ditransmisikan secara serial melalui perangkat Bluetooth ke Robot, di mana ia diterima, diidentifikasi, dan diteruskan ke modul yang sesuai.· Masukan ke sistem berasal dari pengguna untuk pergerakan robot. · Input ini pertama kali diproses oleh aplikasi kontrol, yang dikirimkan secara serial melalui Link Bluetooth. Masukan ini kemudian diterima di robot dan diproses kembali. · Output dari sistem adalah sinyal yang diproses ke modul yang sesuai. Modul ini dapat menjadi motor basis robot.
Masukan dan Keluaran Utama:
· Sinyal Input · Pergerakan Lengan Robot · Pergerakan robot. Kami telah mendesainnya sebagai robot asisten tim keamanan, tetapi ada beberapa aplikasi lain dari robot ini.
Dapat digunakan oleh: • Polisi:Dalam situasi penyanderaan • Militer:Untuk misi pengintaian • Pangkalan udara:Ini akan digunakan untuk menangani bahan berbahaya atau radioaktif.
1.4 Basis teoretis dan Organisasi
Tesis ini terdiri dari lima bab. Penjelasan singkat diperkenalkan di sini:
Bab 1:Pendahuluan
Bab ini membahas masalah yang berkaitan dengan latar belakang tujuan skripsi dan struktur penelitian
.
Bab 2:Tinjauan Pustaka Bab ini membahas terutama perangkat Bluetooth, Beberapa literatur tentang topik tesis ini juga termasuk dalam bab ini.
Bab 3:Alat dan Teknik Bab ini membahas semua alat dan perangkat lunak yang digunakan untuk pembuatan proyek
Bab 4:Metodologi Bab 4 akan fokus terutama pada prosedur, metode, dan implementasi teori Melalui perancangan simulasi robot pendeteksi musuh yang diusulkan terkait dengan topik tesis.
Bab 5:Hasil dan Analisis
Robot ini secara praktis diuji dan diverifikasi. Pengujian tersebut mencakup efisiensi sistem penginderaan robot yang dirancang dan kinerjanya.
Bab 6:Kesimpulan Akhirnya, kesimpulan dari hasil yang diperoleh disajikan. Ini juga mencakup hal-hal baru dalam pekerjaan dan saran untuk pekerjaan di masa depan.
Semoga artikel ini akan membantu mahasiswa yang sedang menyelesaikan sarjana atau master di
elektronik dan komunikasi .
Hubungi Kami Untuk Laporan Tesis Lengkap


