Masa depan robotika didistribusikan. Setiap robot kompleks adalah seperangkat modul dan sistem terdistribusi, beberapa otonom, beberapa semi-otonom dan beberapa dikendalikan manusia, semuanya beroperasi bersama untuk membentuk sistem kohesif tunggal dari bagian-bagian yang saling beroperasi. Dalam telerobotik, kami berupaya mengaktifkan operasi jarak jauh robot dan memberi operator perasaan sebagai manusia di mana robot dikerahkan, dengan memberikan video dan kekuatan interaksi kembali ke operator manusia.
Untuk ESA ini berarti di luar angkasa atau di permukaan planet yang tidak bersahabat. Operator manusia mungkin berada di stasiun luar angkasa atau bahkan kembali ke bumi!
Untuk melakukan ini, kami mengaktifkan telepresence melalui kombinasi umpan balik gaya haptic ke operator yang dikombinasikan dengan video augmented reality.
Memberikan umpan balik penglihatan dan sentuhan kepada pengguna memungkinkan telepresence. Semakin realistis dan informatif umpan balik, semakin besar persepsi telepresence dari operator, yang mengarah pada operasi robot jarak jauh yang lebih baik.
Tantangan kritis bagi ESA dari teleoperasi ruang angkasa adalah tautan komunikasi. Ada banyak loop kontrol real-time di robot, tetapi yang paling bermasalah antara manusia dan robot jarak jauh dalam sistem teleoperasi. Beberapa loop kontrol berjalan melalui tautan jaringan packet-switched yang menunjukkan perilaku komunikasi yang paling buruk. Itu dapat terputus kapan saja, latensi sering dapat diukur dalam hitungan detik dan sangat bervariasi, ditambah kehilangan paket adalah kejadian biasa; ini sama benarnya untuk komunikasi melalui Internet seperti halnya di luar angkasa. Namun kami harus mengirim semua video melalui tautan ini, waktu berkorelasi dengan status kontrol robot dan perintah kontrol di kedua ujungnya. Ini berarti bahwa status tautan harus menjadi bagian integral dari loop kontrol, dengan informasi yang cukup tersedia di kedua ujungnya agar operator dapat bereaksi dengan tepat dan agar robot jarak jauh dapat menopang dirinya sendiri dalam keadaan aman dan stabil. Status tautan harus menjadi bagian integral dari status sistem.
Tim pengembangan ESA terdiri dari insinyur mekatronik, spesialis visi komputer, ahli teori sistem kontrol, dan beberapa insinyur perangkat lunak. Jelas bagi kami pada tahap awal bahwa kami perlu mencari metode umum untuk membahas kebutuhan dan antarmuka sistem, terutama ketika diminta untuk memberikan sistem terdistribusi yang kompleks yang melibatkan banyak komputer, berbagai platform perangkat keras dan perangkat lunak untuk beroperasi; kami memilih data. Kami berpikir tentang data sebagai sarana untuk memahami keadaan sistem, sebagai sarana untuk mewakili bingkai video dan sebagai sarana untuk mewakili teori kontrol. Oleh karena itu, masuk akal untuk mendekati lingkungan pengembangan dan pengembangan sistem kami secara terpusat pada data. Ditambah dengan kebutuhan kritis untuk memahami status tautan sebagai bagian dari operasi jarak jauh, kami tak terhindarkan dituntun untuk menilai DDS (Layanan Distribusi Data). NASA sudah menjadi pengguna berat DDS dalam sistem komunikasi antariksanya – tetapi dapatkah DDS juga mengaktifkan operasi jarak jauh melalui tautan yang sulit seperti itu, memungkinkan kontrol waktu nyata atas koneksi apa yang memang paling menantang? Ini adalah wilayah ilmiah baru yang belum dijelajahi, dan semakin menarik karena itu. Indikasi awal sangat menggembirakan.
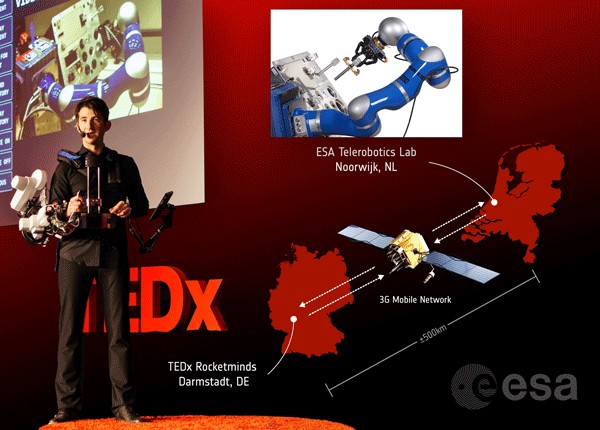
Demonstrasi teleoperasi menggunakan Exo-1 yang terhubung ke lengan robot Kuka melalui sambungan telepon 2G.
Dalam demonstrasi langsung ini di TEDx RheinMain RocketMinds, Mei 2014, saya menggunakan prototipe lengan exo-skeleton EXO-1 kami untuk mengontrol lengan robot dari jarak jauh yang secara fisik terletak di ESA Telerobotics kami &Lab Haptics lebih dari 500 km jauhnya. Tugas saya adalah mengambil pin logam dan meletakkannya di lubang dengan toleransi celah kurang dari 0,5 mm. Seluruh demo dijalankan melalui koneksi WAN telepon 2G berbasis Internet karena koneksi 3G yang direncanakan tiba-tiba tidak tersedia! Di ruang tertutup, penuh sesak dengan orang-orang dengan ponsel di saku mereka, bandwidth sangat terbatas, dan sebenarnya menunjukkan jenis koneksi yang dialami di ruang angkasa – atau sebenarnya jauh lebih buruk. Tidak ada yang lebih buruk dari itu, teleoperating melalui tautan yang menunjukkan penundaan dalam rentang 15 detik dengan kehilangan data yang signifikan. Namun, DDS yang berjalan melalui tautan 2G berhasil menangani semua komunikasi untuk umpan balik haptic, loop kontrol lengan robot, dan video lengan robot di lab (distreaming ke kedua tablet di lengan saya dan dikloning secara lokal untuk ditampilkan di layar. layar TEDx utama).
Mungkin belum ada di luar angkasa, tetapi kontrol telerobotik presisi untuk jarak yang jauh dan tautan data yang menantang dengan visi dan umpan balik haptic benar-benar ada dalam genggaman kami dan kami telah menunjukkannya kepada khalayak luas .
PERBARUI :Eksperimen Haptics-1 dilakukan di atas Stasiun Luar Angkasa Internasional oleh Astronot NASA Barry Wilmore. Pre-test pertama dilakukan pada 30.12.2014. Haptics-1 adalah eksperimen umpan balik gaya robotik pertama di luar angkasa. Selamat! baca selengkapnya
Umpan balik #haptic pertama kali digunakan di luar angkasa! Hari ini @Space_Station#haptics-1 berhasil dilaksanakan! pic.twitter.com/30zD5GzGqs
— ESAtelerobotics (@ESAtelerobotics) 30 Desember 2014
Jika Anda memiliki cerita tentang penggunaan Connext DDS yang ingin Anda bagikan, kirimkan email kepada kami di blogadmin@rti.com.